Comparison of Relaxation Modulus Converted from Frequency- and Time-Dependent Viscoelastic Functions through Numerical Methods




Abstract
:1. Introduction
2. Methodology
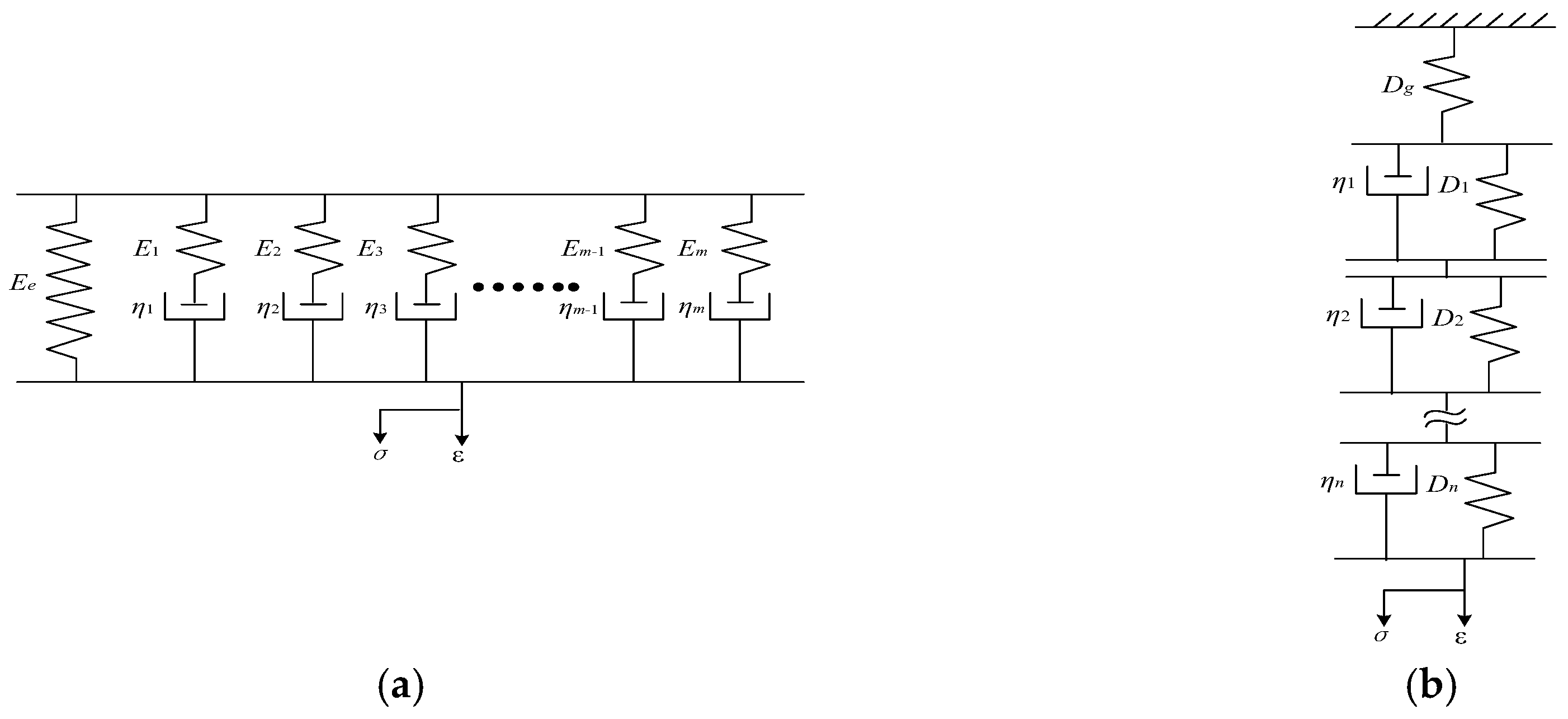
2.1. Viscoelastic Response Representations
2.2. Interconversion Relationship between Time-Domain and Frequency-Domain Functions
2.2.1. Interconversion from Dynamic Modulus to Relaxation Modulus
- (1)
- Pre-smooth and fit the experimental data of dynamic modulus and phase angle;
- (2)
- Calculate the storage modulus based on experimental data;
- (3)
- Make the storage modulus determined by Equation (11) equal to the so as to obtain Prony series coefficients and ;
- (4)
- Substitute and into the relaxation modulus representation to plot its master curve over a wide time region.
2.2.2. Interconversion from Creep Compliance to Relaxation Modulus
- (1)
- Pre-smooth the experimental data of creep compliance and fit its Prony series coefficients and ;
- (2)
- Calculate the Prony series of relaxation modulus based on [E] = [A]−1[B] by converting and to and ;
- (3)
- Substitute and into the relaxation modulus representation to plot the master curve of it over a wide time region.
3. Numerical Examples
3.1. Experiments Design
3.2. Experimental Data Processing
3.3. Interconversions
3.3.1. Dynamic Modulus to Relaxation Modulus
3.3.2. Creep Compliance to Relaxation Modulus
3.4. Discussion of Results
3.5. Validation of the Methodology
4. Conclusions
- For the transition of creep compliance to relaxation modulus, using the collocation method and least squares method is quite related. However, the collocation method is not as complex as the least squares method. Thus, the collocation method may be preferable in practice.
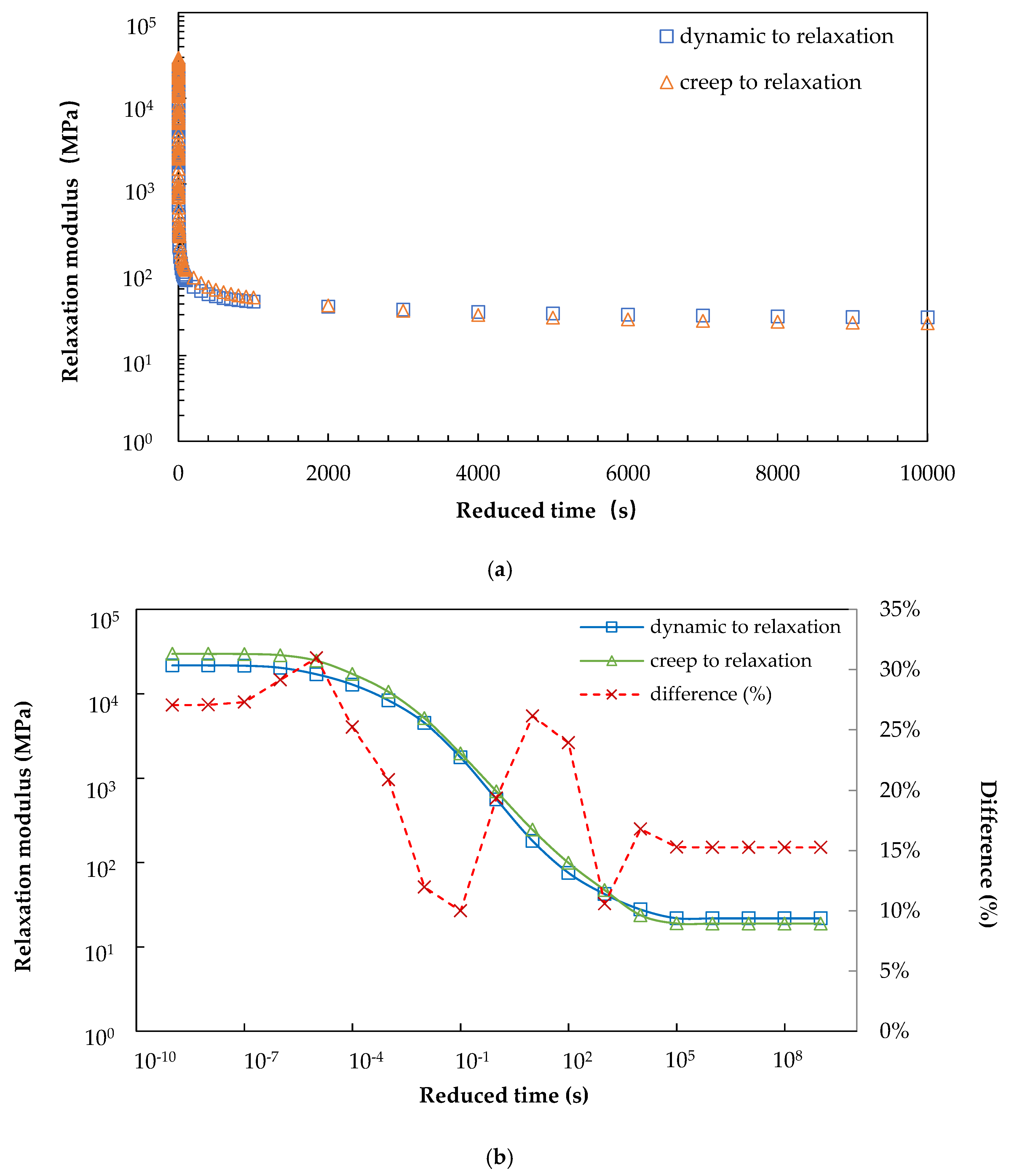
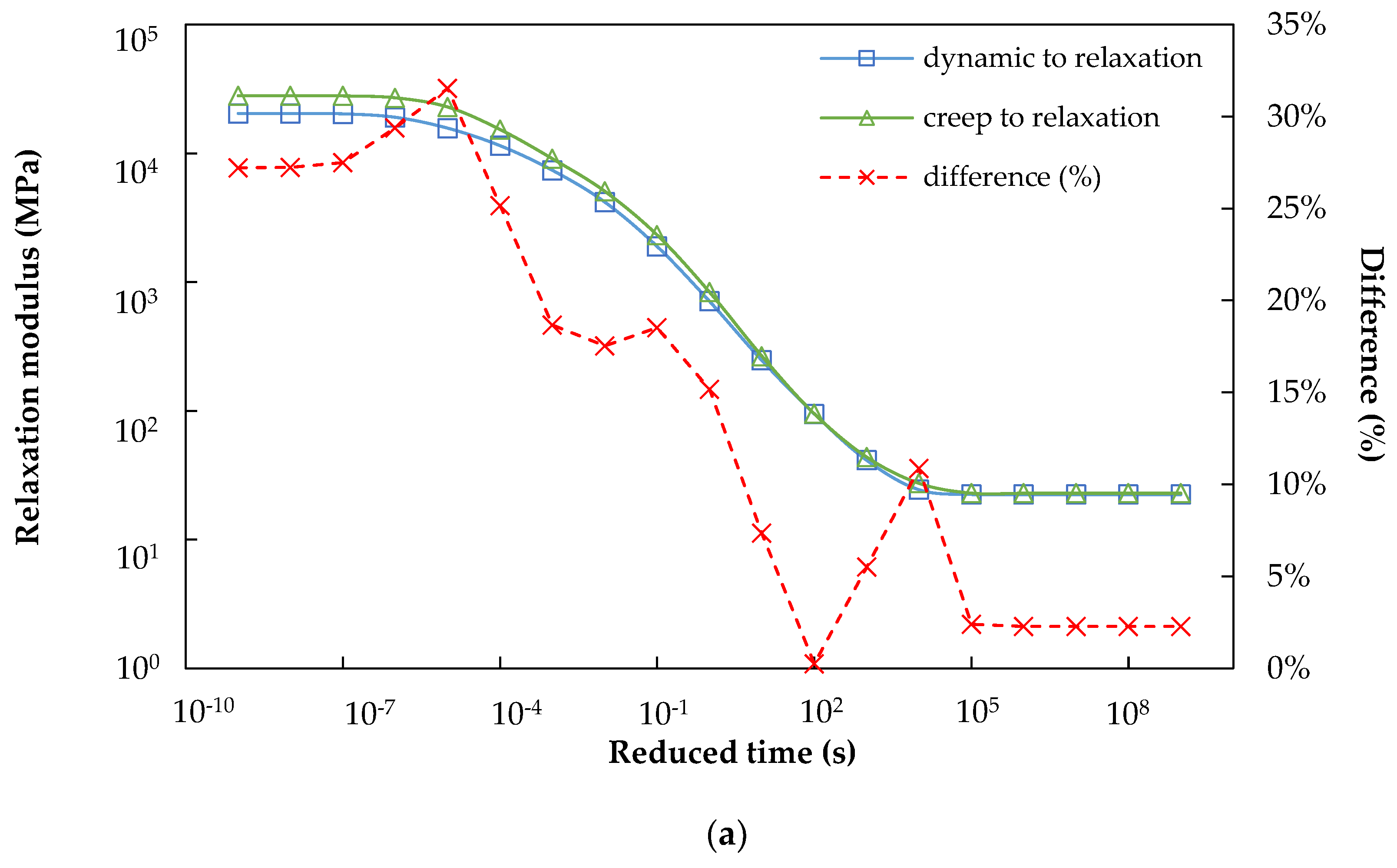
- The master curves of relaxation modulus converted from dynamic modulus and creep compliance do not present statistical difference at both short- and long-term time domain, and the major difference is observed at the transient time region.
- Potential reasons for the difference in the transient reduced time region may be attributed to the error in Prony series coefficients. The master curve pattern is sensitive to the Prony series coefficients. However, in the pre-smoothing and fitting process, the approximation is common, leading to loss of information. The most vulnerable time range of relaxation modulus may be the transient reduced time range.
5. Future Studies
Author Contributions
Funding
Conflicts of Interest
References
- Biot, M.A. Theory of Stress-Strain Relations in Anisotropic Viscoelasticity and Relaxation Phenomena. J. Appl. Phys. 1954, 25, 1385–1391. [Google Scholar] [CrossRef]
- Park, S.W.; Kim, Y.R. Interconversion between Relaxation Modulus and Creep Compliance for Viscoelastic Solids. J. Mater. Civ. Eng. 1999, 11, 76–82. [Google Scholar] [CrossRef]
- Schapery, R. A Simple Collocation Method for Fitting Viscoelastic Models to Experimental Data; California Institute of Technology: Pasadena, CA, USA, 1962. [Google Scholar]
- Mun, S.; Chehab, G.; Kim, Y.R. Determination of Time-domain Viscoelastic Functions using Optimized Interconversion Techniques. Road Mater. Pavement Des. 2007, 8, 351–365. [Google Scholar] [CrossRef]
- Kim, Y.R. Modeling of Asphalt Concrete; ASCE Press: Reston, VA, USA, 2009; pp. 751–772. [Google Scholar]
- Sun, W.P.; Kim, Y.R.; Schapery, R.A. A viscoelastic continuum damage model and its application to uniaxial behavior of asphalt concrete. Mech. Mater. 1996, 24, 241–255. [Google Scholar]
- Williams, M.L. Structural analysis of viscoelastic materials. AIAA J. 2012, 2, 785–808. [Google Scholar] [CrossRef]
- Forough, S.A.; Nejad, F.M.; Khodaii, A. Comparing various fitting models to construct the tensile relaxation modulus master curve of asphalt mixes. Int. J. Pavement Eng. 2016, 17, 314–330. [Google Scholar] [CrossRef]
- Park, S.W. Analytical modeling of viscoelastic dampers for structural and vibration control. Int. J. Solids Struct. 2001, 38, 8065–8092. [Google Scholar] [CrossRef]
- Cost, T.L.; Becker, E.B. A multidata method of approximate Laplace transform inversion. Int. J. Numer. Methods Eng. 1970, 2, 207–219. [Google Scholar] [CrossRef]
- Park, S.W.; Kim, Y.R. Fitting Prony-Series Viscoelastic Models with Power-Law Pre-smoothing. J. Mater. Civ. Eng. 2001, 13, 26–32. [Google Scholar] [CrossRef]
- Parot, J.M.; Duperray, B. Exact computation of creep compliance and relaxation modulus from complex modulus measurement data. Mech. Mater. 2008, 40, 575–585. [Google Scholar] [CrossRef]
- Hu, S.; Zhou, F. Development of a new interconversion tool for hot mix asphalt (HMA) linear viscoelastic functions. Can. J. Civ. Eng. 2010, 37, 1071–1081. [Google Scholar] [CrossRef]
- Mun, S.; Zi, G. Modeling the viscoelastic function of asphalt concrete using a spectrum method. Mech. Time-Depend. Mater. 2010, 14, 191–202. [Google Scholar] [CrossRef]
- Park, S.W.; Schapery, R.A. Methods of interconversion between linear viscoelastic material functions. Part I—A numerical method based on Prony series. Int. J. Solids Struct. 1999, 36, 1653–1675. [Google Scholar] [CrossRef]
- Christensen, R.M.; Freund, L.B. Theory of Viscoelasticity; Academic Press: Cambridge, MA, USA, 1982; p. 720. [Google Scholar]
- Denby, E.F. A note on the interconversion of creep, relaxation and recovery. Rheol. Acta 1975, 14, 591–593. [Google Scholar] [CrossRef]
- Leaderman, H. Viscoelasticity phenomena in amorphous high polymeric systems. In Rheology; Elsevier Inc.: Amsterdam, The Netherlands, 1958; pp. 1–61. [Google Scholar]
- Booij, H.C.; Thoone, G.P.J.M. Generalization of Kramers-Kronig transforms and some approximations of relations between viscoelastic quantities. Rheol. Acta 1982, 21, 15–24. [Google Scholar] [CrossRef]
- Schapery, R.A. Approximate Methods of Transform Inversion for Viscoelastic Stress Analysis. Proc. Fourth US Natl. Congr. Appl. Mech. 1962, 2, 1075–1085. [Google Scholar]
- Cannone Falchetto, A.; Moon, K.H. Comparisons of analytical and approximate interconversion methods for thermal stress computation. Can. J. Civ. Eng. 2015, 42, 705–719. [Google Scholar] [CrossRef]
- Schapery, R.A.; Park, S.W. Methods of interconversion between linear viscoelastic material functions. Part II—An approximate analytical method. Int. J. Solids Struct. 1999, 36, 1677–1699. [Google Scholar] [CrossRef]
- Zhao, Y.; Ni, Y.; Zeng, W. A consistent approach for characterising asphalt concrete based on generalised Maxwell or Kelvin model. Road Mater. Pavement Des. 2014, 15, 674–690. [Google Scholar] [CrossRef]
- Hopkins, I.L.; Hamming, R.W. On Creep and Relaxation. J. Appl. Phys. 1957, 28, 906–909. [Google Scholar] [CrossRef]
- Banks, H.T.; Hu, S.; Kenz, Z.R. A Brief Review of Elasticity and Viscoelasticity for Solids. Adv. Appl. Math. Mech. 2011, 3, 1–51. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Luo, R.; Lytton, R.L. Anisotropic Viscoelastic Properties of Undamaged Asphalt Mixtures. J. Transp. Eng. 2012, 138, 75–89. [Google Scholar] [CrossRef]
- Zhao, Y.; Tang, J.; Liu, H. Construction of triaxial dynamic modulus master curve for asphalt mixtures. Constr. Build. Mater. 2012, 37, 21–26. [Google Scholar] [CrossRef]
- Forough, S.A.; Nejad, F.M.; Khodaii, A. A comparative study of temperature shifting techniques for construction of relaxation modulus master curve of asphalt mixes. Constr. Build. Mater. 2014, 53, 74–82. [Google Scholar] [CrossRef]
- Zhu, H.; Sun, L.; Yang, J.; Chen, Z.; Gu, W. Developing Master Curves and Predicting Dynamic Modulus of Polymer-Modified Asphalt Mixtures. J. Mater. Civ. Eng. 2011, 23, 131–137. [Google Scholar] [CrossRef]
- Tarefder, R.A.; Rahman, A.S.M.A. Interconversion of Dynamic Modulus to Creep Compliance and Relaxation Modulus: Numerical Modeling and Laboratory Validation. Presented at the 95th Annual Meeting of the Transport Research Board, Washington, DC, USA, 10–14 January 2016. [Google Scholar]
- Tian, X.; Liu, L.; Yu, F.; He, L. Relaxation Modulus Model of Aged Asphalt Mixture. J. Highw. Transp. Res. Dev. 2015, 9, 1–6. [Google Scholar] [CrossRef]
- Zhao, Y.; Tang, J.; Long, B. Determination of Relaxation Modulus Using Complex Modulus of Asphalt Mixture. J. Build. Mater. 2012, 15, 498–502. [Google Scholar]
- Anderssen, R.S.; Davies, A.R.; de Hoog, F.R. The effect of kernel perturbations when solving the interconversion convolution equation of linear viscoelasticity. Appl. Math. Lett. 2011, 24, 71–75. [Google Scholar] [CrossRef]
- Tschoegl, N.W. The Phenomenological Theory of Linear Viscoelastic Behavior; World Publishing Corp.: New York, NY, USA, 1990; pp. 27–29. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sieve Size (mm) | 19 | 12.5 | 9.5 | 4.75 | 2.36 | 1.18 | 0.6 | 0.3 | 0.15 | 0.075 |
| Passing Rate (%) | 100 | 93.0 | 74.8 | 50.3 | 30.3 | 24.6 | 19.4 | 15.0 | 10.3 | 6.5 |
| Fitting parameters, dynamic modulus master curve (T0 = 21.1 °C) | α | β | δ | γ |
| 1.3530 | 2.8961 | 0.7631 | 0.6983 | |
| Fitting parameters, phase angle master curve (T0 = 21.1 °C) | ξ1 | ξ2 | ξ3 | |
| −0.6555 | −0.0008405 | −0.59608 | ||
| Time-temperature shifting factor () | 4.4 °C | 21.1 °C | 37.8 °C | 54.4 °C |
| 1.8454 | 0 | −1.3743 | −2.9746 |
| No. | ||||||
|---|---|---|---|---|---|---|
| Dynamic to Relaxation | Creep to Relaxation | |||||
| Collocation Method | Least Squares | |||||
| 1 | 2 × 10−6 | 2.14 × 10−6 | 2 × 10−6 | 2888.60 | 1542.07 | 2339.76 |
| 2 | 2 × 10−5 | 9.26 × 10−6 | 2 × 10−5 | 3858.85 | 7967.98 | 7236.69 |
| 3 | 2 × 10−4 | 2.07 × 10−5 | 2 × 10−4 | 4791.64 | 6962.31 | 7381.14 |
| 4 | 2 × 10−3 | 3.91 × 10−5 | 2 × 10−3 | 4175.53 | 6426.10 | 6218.63 |
| 5 | 2 × 10−2 | 1.00 × 10−4 | 2 × 10−2 | 3510.67 | 4146.14 | 4243.43 |
| 6 | 2 × 10−1 | 2.89 × 10−4 | 2 × 10−1 | 1669.80 | 1712.93 | 1750.13 |
| 7 | 2 × 100 | 8.35 × 10−4 | 2 × 100 | 530.77 | 616.41 | 626.74 |
| 8 | 2 × 101 | 2.63 × 10−3 | 2 × 101 | 144.70 | 197.50 | 200.97 |
| 9 | 2 × 102 | 6.64 × 10−3 | 2 × 102 | 42.56 | 64.27 | 67.28 |
| 10 | 2 × 103 | 1.30 × 10−2 | 2 × 103 | 18.22 | 34.14 | 32.71 |
| 11 | 2 × 104 | 2.92 × 10−2 | 2 × 104 | 9.63 | 7.63 | 8.84 |
| 3.33×10−5 | 21.83 | 18.94 | 18.94 | |||
| No. | |||||||
|---|---|---|---|---|---|---|---|
| Evotherm | Rubber | Polymer | |||||
| Dynamic to Relaxation | Creep to Relaxation | Dynamic to Relaxation | Creep to Relaxation | Dynamic to Relaxation | Creep to Relaxation | ||
| 1 | 2 × 10−6 | 2887.79 | 1628.27 | 2757.41 | 2889.77 | 2888.43 | 2677.87 |
| 2 | 2 × 10−5 | 4120.24 | 7975.11 | 3796.04 | 7164.79 | 3842.27 | 6895.38 |
| 3 | 2 × 10−4 | 4511.36 | 7458.14 | 4191.18 | 7465.54 | 4325.67 | 7378.90 |
| 4 | 2 × 10−3 | 3532.57 | 4518.68 | 3605.38 | 5829.68 | 3549.11 | 5891.67 |
| 5 | 2 × 10−2 | 2838.39 | 3347.47 | 3139.01 | 4460.67 | 3207.17 | 3560.67 |
| 6 | 2 × 10−1 | 1558.67 | 1965.74 | 1744.32 | 2274.53 | 1663.13 | 1633.28 |
| 7 | 2 × 100 | 632.04 | 788.14 | 672.53 | 793.78 | 652.71 | 755.31 |
| 8 | 2 × 101 | 202.66 | 234.71 | 198.79 | 227.54 | 213.06 | 261.15 |
| 9 | 2 × 102 | 71.68 | 69.27 | 47.66 | 78.26 | 71.329 | 85.80 |
| 10 | 2 × 103 | 25.76 | 22.50 | 39.76 | 42.71 | 30.29 | 39.23 |
| 11 | 2 × 104 | 3.01 | 7.09 | 8.32 | 9.45 | 6.90 | 11.19 |
| 22.38 | 22.90 | 23.15 | 23.66 | 23.14 | 25.46 | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Cui, B.; Gu, X.; Dong, Q. Comparison of Relaxation Modulus Converted from Frequency- and Time-Dependent Viscoelastic Functions through Numerical Methods. Appl. Sci. 2018, 8, 2447. https://doi.org/10.3390/app8122447
Zhang W, Cui B, Gu X, Dong Q. Comparison of Relaxation Modulus Converted from Frequency- and Time-Dependent Viscoelastic Functions through Numerical Methods. Applied Sciences. 2018; 8(12):2447. https://doi.org/10.3390/app8122447
Chicago/Turabian StyleZhang, Weiguang, Bingyan Cui, Xingyu Gu, and Qiao Dong. 2018. "Comparison of Relaxation Modulus Converted from Frequency- and Time-Dependent Viscoelastic Functions through Numerical Methods" Applied Sciences 8, no. 12: 2447. https://doi.org/10.3390/app8122447
APA StyleZhang, W., Cui, B., Gu, X., & Dong, Q. (2018). Comparison of Relaxation Modulus Converted from Frequency- and Time-Dependent Viscoelastic Functions through Numerical Methods. Applied Sciences, 8(12), 2447. https://doi.org/10.3390/app8122447