1. Introduction
Structural health monitoring plays an indispensable role in diagnosing structure safety around the world [
1], and tunnel deformation monitoring is one of the important tasks [
2]. With the continuous expansion of the scale of tunnel traffic infrastructure construction, tunnel collapse accidents have occurred frequently in recent years [
3]; this indicates that the traditional methods for monitoring tunnel deformation are unable to meet the new safety monitoring requirements for large tunnel traffic infrastructure [
4], when real time becomes an important issue. In tunnel construction, the tunnel excavation surface is composed of tunnel face, side face, and roof face. Numerous workers are present on the excavation surface with dusty and dark environment in low visibility [
5], and the tunnel deformation is at a maximum; thus, monitoring the deformation of this fracture surface in real time is important. The current tunnel deformation monitoring technology, including non-machine vision measurement methods and machine vision measurement methods [
6], however, is not effective enough. Most of the existing equipment is manually operated and susceptible to a dusty and dark environment in low visibility, and cannot meet real-time automatic monitoring and early warning requirements or provide timely warnings about dangerous deformation [
7].
Non-machine vision measurement methods are widely used in tunnel deformation monitoring; however, they are susceptible to environmental and human factors, and take a long time. Tape extensometers and convergence gauge are unstable and operated manually; in addition, they are strongly influenced by environmental and human factors [
8]. The leveling method mainly addresses the tunnel settlement value [
9] and requires many monitoring points to be set; thus, the error accumulates with the increase in the tunnel length. The indoor global positioning system measurement method requires many reference signal transmitters; however, it is difficult to ensure the stability of the reference signal transmitters position. The traditional total station measurement method has a low degree of automation, exhibits strong subjectivity, and requires a fixed station; these features affect the tunnel construction period [
10]. The new-generation total station measurement method allows stations to be freely monitored, compared with the traditional method [
11,
12], but it cannot be used to monitor all kinds of tunnels because of its high cost [
13]. The fiber Bragg grating measurement method [
14] can be used to monitor tunnel deformation constantly over a long period of time, but it is expensive, and the relevant equipment is easily damaged. Moreover, the equipment needs to be embedded into the structure or adhered onto the structure surface during monitoring, which results in a higher demand on the environment. A deformation monitoring system based on ultrasonic sensors [
15] is automatic and in real time; however, it is only suitable for small- to middle-size tunnels, and it cannot be used to realize early warnings of dangerous deformation during the construction. Terrestrial laser scanning [
16] achieves tunnel deformation monitoring; however, it takes a long time to obtain and process point cloud data, and cannot realize real-time monitoring.
A machine vision measurement method for tunnel deformation develops a lot in the last few years [
17]; however, existing machine vision measurement methods are not suitable for real-time tunnel deformation monitoring during construction with dusty and dark environments. A three-dimensional reconstruction method based on machine vision [
18] needs to take lots of photos and the data processing algorithms are complex; this takes a long time and cannot meet real-time automatic monitoring and early warning requirements. A digital close-range photogrammetric method [
19] is susceptible to tunnel dust and light intensity, heavy dust and a dark environment during construction reduces photo quality and detection accuracy. A photogrammetric method for tunnel detection based on a CCD camera [
20] has a higher requirement for brightness and lighting equipment; this requires external power supply; when using batteries, the equipment is heavy and not easy to install; when using an electric generator, extra great vibration is produced and this affects the result. The infrared photogrammetric method [
21] reduces dust impact at the price of decreasing photo brightness; as a result, the detection accuracy is low and cannot be used for real-time monitoring. Photogrammetric techniques for monitoring tunnel deformation [
22] are only suitable for tunnels without dust after excavation, and it is also susceptible to dusty and dark environments. A tunnel detection method combining photogrammetry and laser scanning [
23] is susceptible to the set position of the equipment; when the equipment is set deviating from the tunnel axis, the detection error increases obviously [
24]; this indicates that the method is not suitable for a tunnel during construction, since the set position has a conflict with tunnel construction.
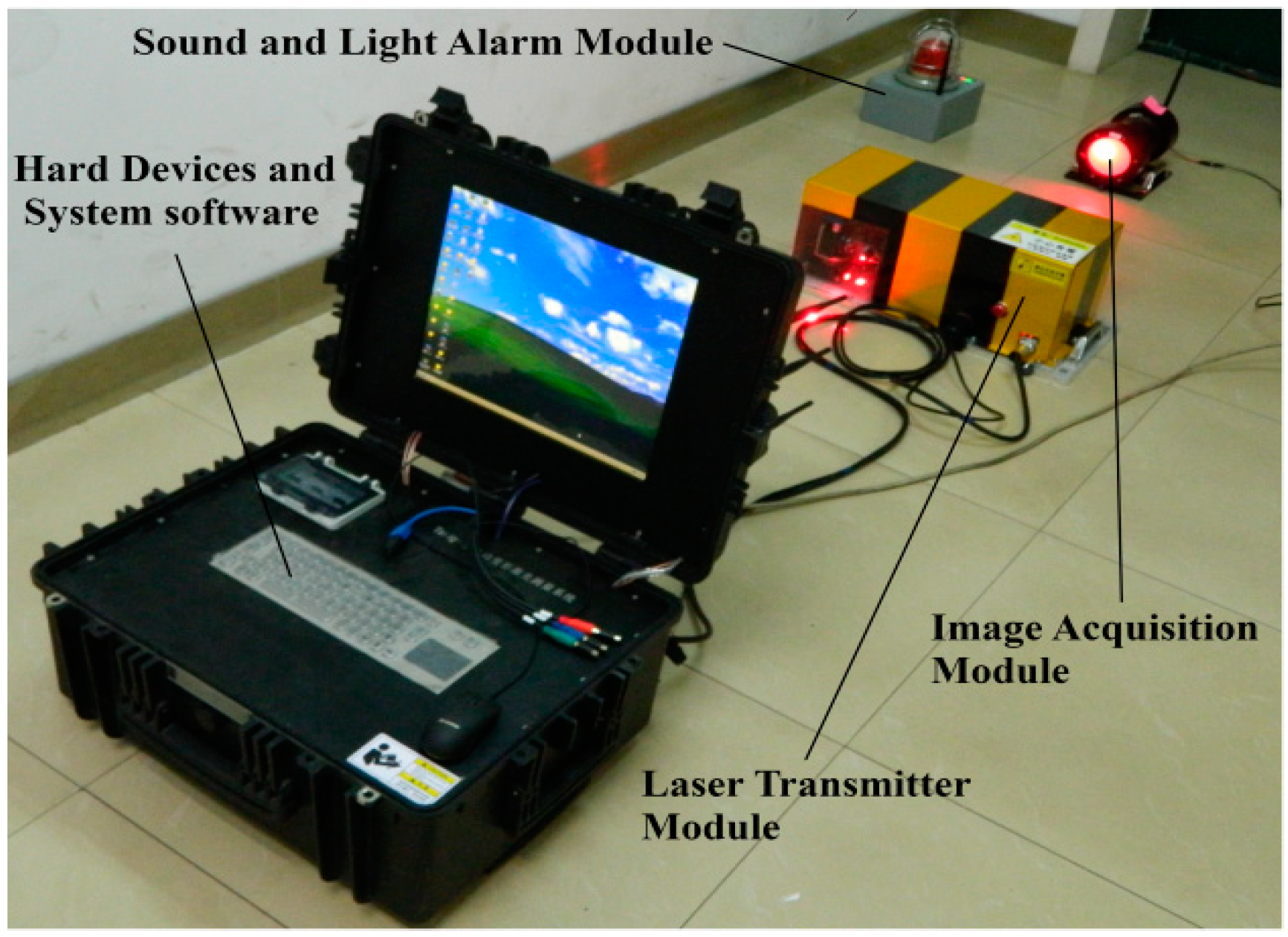
This paper presents a real-time and automatic tunnel deformation monitoring system to realize real-time monitoring and early warning for dangerous tunnel deformation. Considering the dusty and dark tunneling environment, a fixed laser beam is used to transmit the monitoring reference from a stable point to a measured point through the dust and darkness in low visibility, and a shielded image acquisition module mounted on the measured points is used to acquire the laser spot image regardless of the dust and darkness. However, because of the adverse tunnel environment, the measurement result is affected by laser beam feasibility, temperature, air refraction index, and wireless antenna attitude. These factors are carefully examined in this study, and compensation methods are proposed to reduce the measurement errors caused by them. The results show that the proposed system not only achieves good detection accuracy, repeatability and resolution, but also compensates for the shortcomings of the above methods, such as the low degree of automation, the lack of real-time measurement function and overcoming the influence of dusty and dark environments in low visibility.
2. Methodology
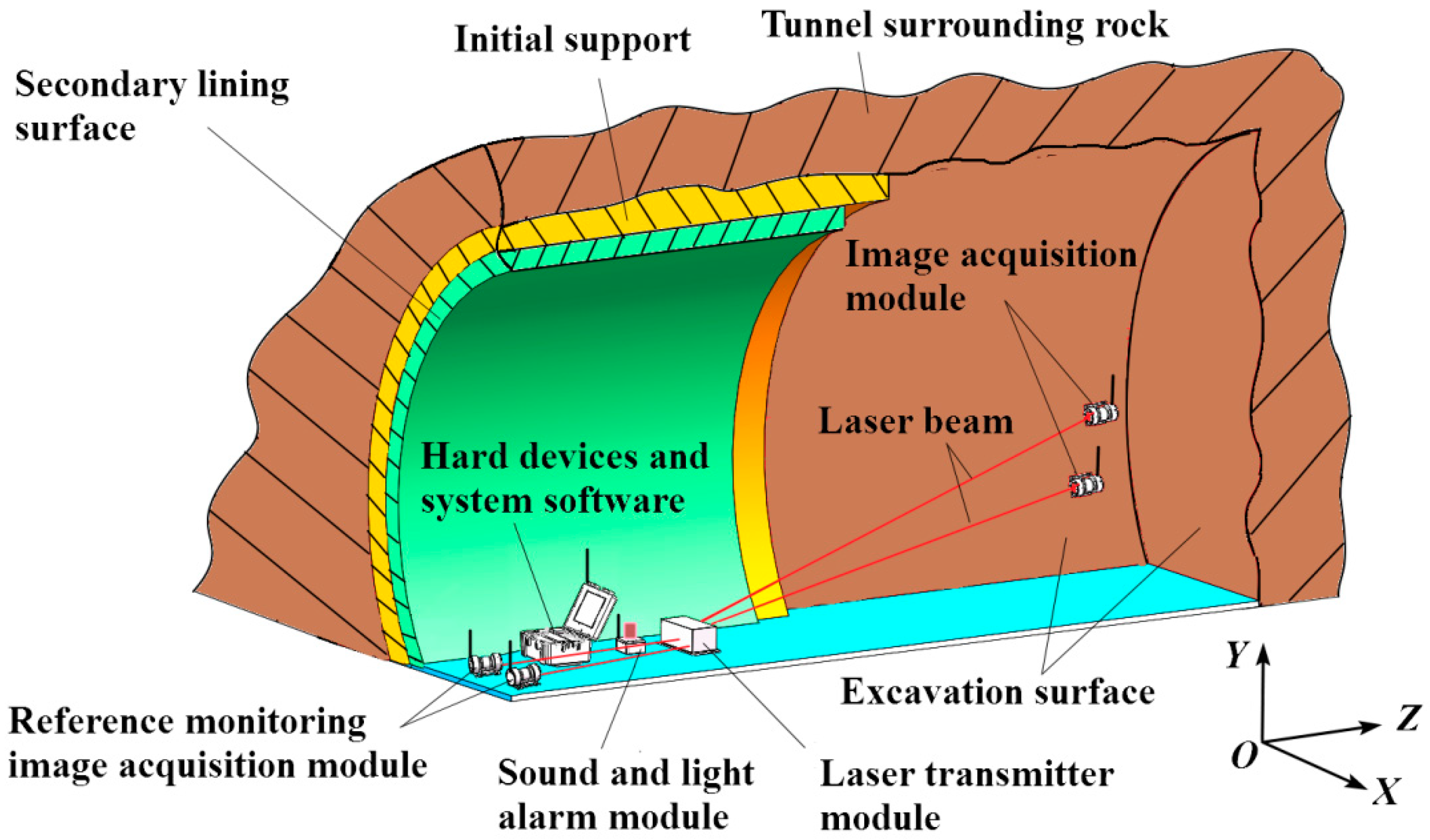
The tunnel collapse process is the deformation of the construction fracture surface in the tunnel, which takes a fixed point of the earth as a reference. At present, the new Austrian tunneling method [
25], which includes designing an initial support and secondary lining to the construction fracture surface [
26], is mostly adopted in tunnel construction. The secondary lining is constructed on the basis of the initial support when the deformation of the initial support becomes stable [
27]. Therefore, the deformation of the secondary lining surface can be ignored; however, the deformation of the excavation surface and the edge part of the initial support is significant. The proposed system takes a fixed point of the earth as monitoring reference and measures the deformation of excavation surface. Given the good directivity and energy concentration of a laser, as well as the dusty and dark tunneling environment in low visibility, a laser beam is used to transmit the monitoring reference from the fixed point to the measured point through the dust and darkness, thereby forming an optical projection of the fixed point on the intersecting surface near the measured point, which is the optical equivalent reference, to monitor the tunnel deformation in the system. A sketch map of the system is shown in
Figure 1.
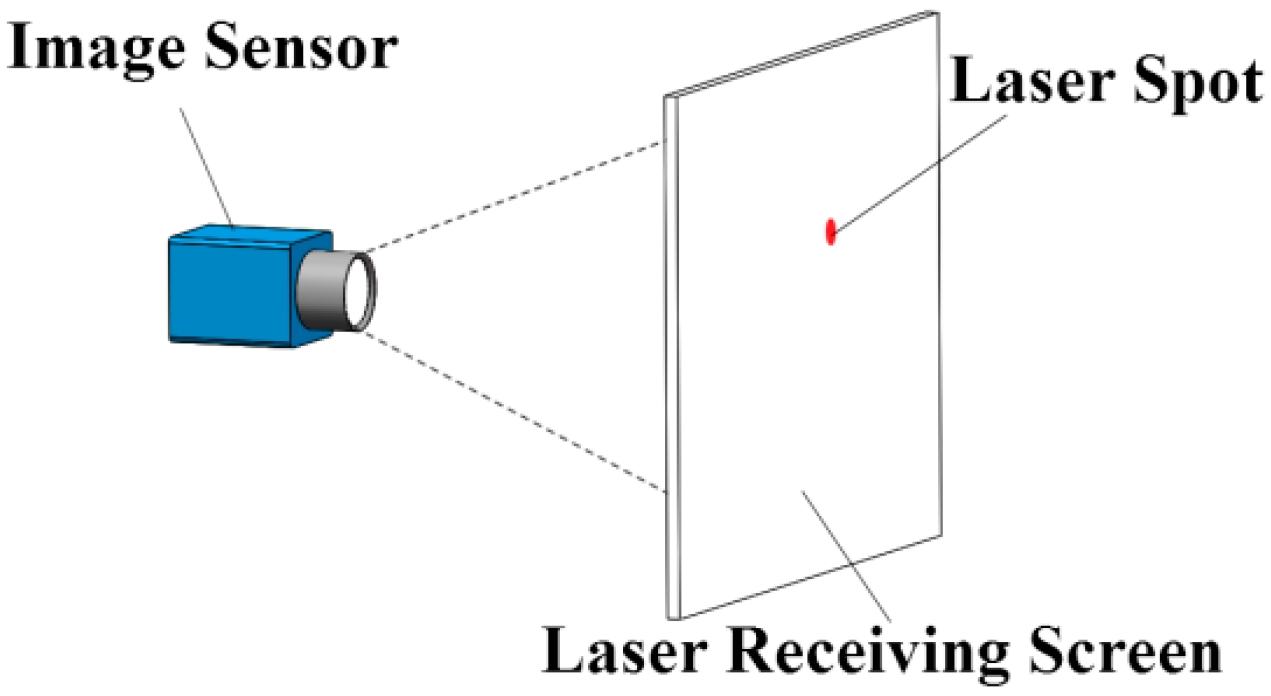
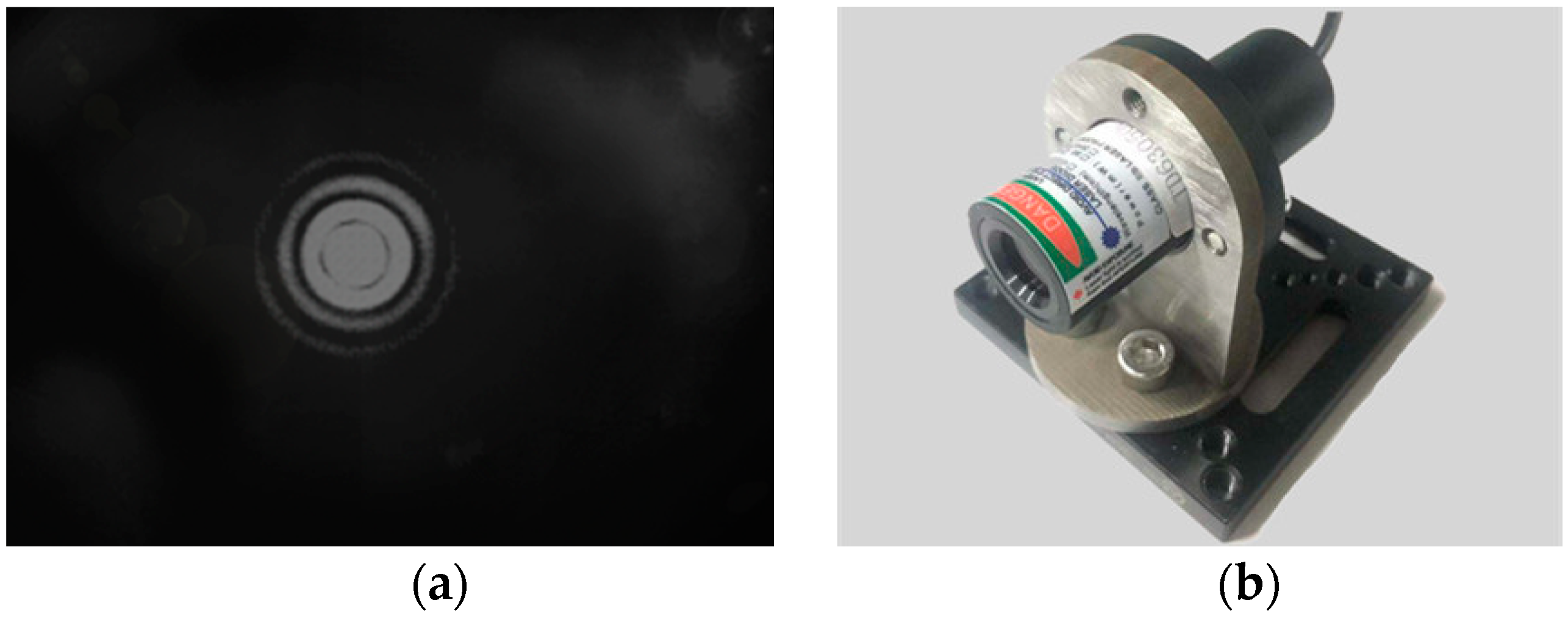
A laser transmitter module, whose laser beam points to the intersecting surface near the measured points and forms an optical projection of the fixed point as a laser spot, is firmly fixed on the earth. To obtain the position relationship between the measured point and the fixed point, an image acquisition module mounted on the measured point and located perpendicularly to the laser beam is used to acquire the laser spot image of the laser beam. This module monitors the laser spot position in the image coordinate system with machine vision technology. The image acquisition mode is shown in
Figure 2. The image sensor acquires the laser spot image through a laser receiving screen placed in front of the sensor.
The image acquisition module is fixed on the measured points. When the excavation surface sinks during the deformation, the image acquisition module will sink along with it, thereby changing the laser spot position in the image coordinate system. The change of the laser spot position in the image coordinate system reflects the deformation of the excavation surface, including accumulative deformation and instantaneous deformation velocity [
28].
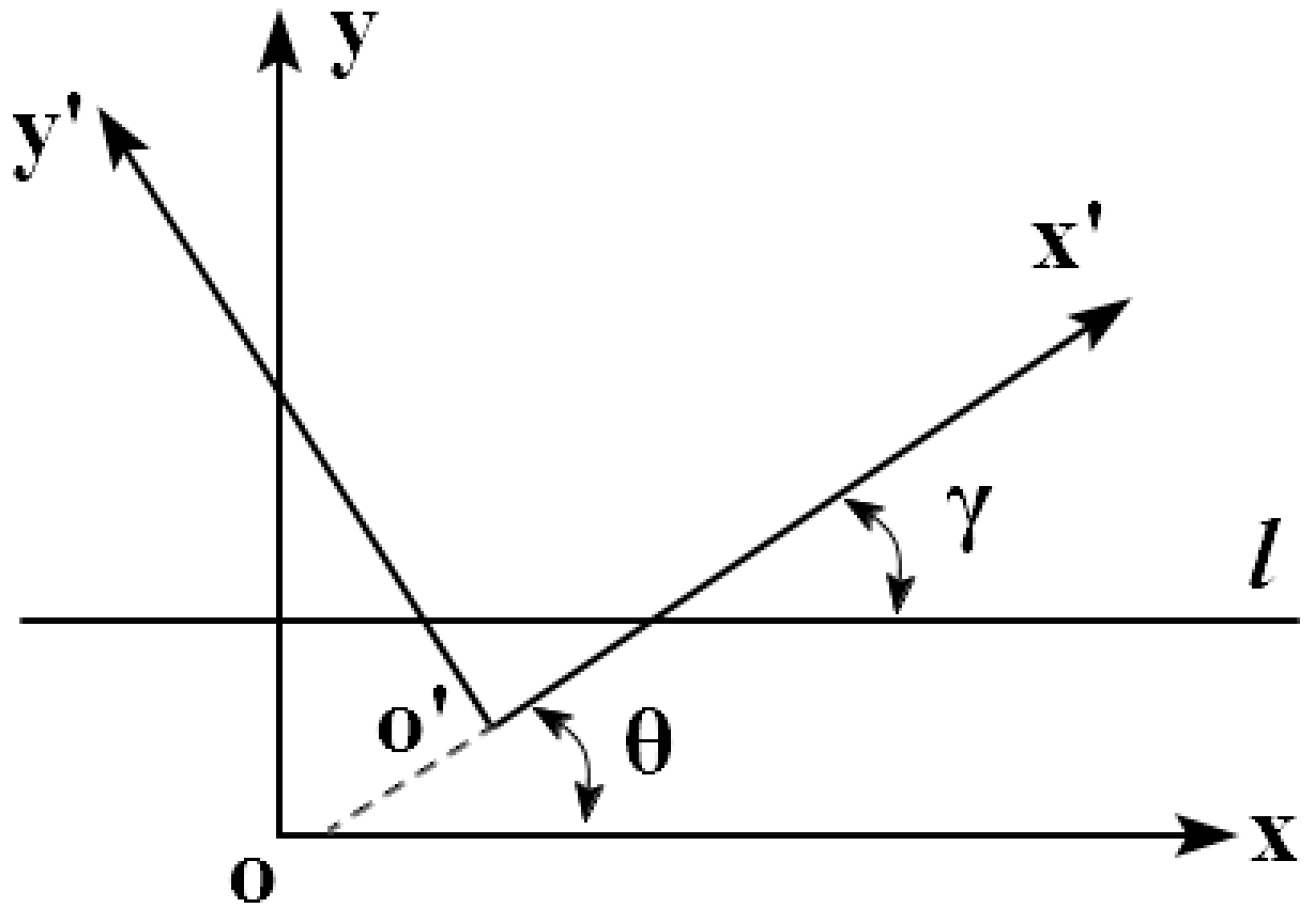
The mathematical model of this principle is shown in
Figure 3. The geometric center of the laser is the coordinate origin, the tunnel driving direction is the
z-axis, the horizontal direction is the
x-axis, and the vertical axis is the
y-axis. Therefore, a three-dimensional world coordinate system
o-
xyz is established. The laser beam points to the laser receiving screen and forms a laser spot
P on the screen.
Considering the horizontal and vertical position information, the coordinates of the spot
P in the world coordinate system
o-
xyz are
. To examine the position information of laser spot
P in the image coordinate system, an image coordinate system on the laser receiving screen is established, as shown in
Figure 3. The
axis is parallel to the
axis, and the
axis is parallel to the
axis; the coordinates of laser spot
P in the image coordinate system are
. The coordinate transformation of spot
P in the two coordinate systems is shown in Equation (1). The constants
and
are coordinate conversion parameters, which are related to the relative position of the two coordinate systems:
In the three-dimensional world coordinate system
o-
xyz, the laser beam equation is shown as Equation (2), and the equation of the intersecting surface near the measured point is shown as Equation (3), where
A,
B,
C, and
d are constant parameters and are related to the laser position:
According to Equations (1)–(3), the coordinates of the laser spot in the image coordinate system
o′-
x′
y′ can be obtained as shown in Equation (4):
According to Equation (4), when the positions of laser and image acquisition module are invariant, that is, when the parameters A, B, C, and d are invariant, the coordinates of the laser spot in the image coordinate system remain fixed. Therefore, the monitoring reference can be transmitted from the fixed point of the earth to the measured points. When the image acquisition module sinks during tunnel deformation, the image coordinate system moves relative to the world coordinate system o-xyz. Supposing that the vertical and horizontal deformation amounts of the image acquisition module are Δx and Δy, respectively, the laser spot position in the image coordinate system also shifts Δx and Δy in the vertical and horizontal directions, respectively. Therefore, when the image acquisition module shifts in the vertical and horizontal directions along with the measured point, the change of the laser spot position in the image coordinate system reflects the deformation.
In an actual situation, the laser beam is not absolutely perpendicular to the laser receiving screen. As a result, when the image acquisition module moves along the
z-axis with the measured point, the laser spot will produce the displacement component in the vertical and horizontal directions. As shown in
Figure 3,
α is the angle between the laser beam and the
ox axis,
β is the angle between the laser beam and the
oy axis, and
θ is the angle between the laser beam and the
oz axis. Assuming that the displacement change of image acquisition module along the
oz axis is Δ
z, the errors of the horizontal and vertical deformation measurements are as shown in Equation (5):
Assuming that the laser beam points obliquely to the receiving screen, the angles
α = 73.3°,
β = 81.5°, and
θ = 18.9° (in fact, the tilt of the laser beam is not that particularly obvious). When the image acquisition module shifts 1 mm along the
oz axis, Δ
x = 0.3037 mm and Δ
y = 0.1562 mm. Therefore, when the shifting displacement of the image acquisition module along the
z-axis is not large (and in fact it is not large) [
29], this error can be ignored.
The laser transmitter module is mounted on the fixed point of the earth distant from the construction site, and it should remain stable. However, in cases of emergency during construction, such as sudden vibrating, when the laser beam reference is shifted and rotated, the position of the laser spot in the image coordinate will change. Taking the
x-axis coordinate as an example, if the displacements along the
x-axis and the horizontal rotation angle of the laser beam reference are
and
, respectively, the resulting laser spot position error
is as shown in Equation (6):
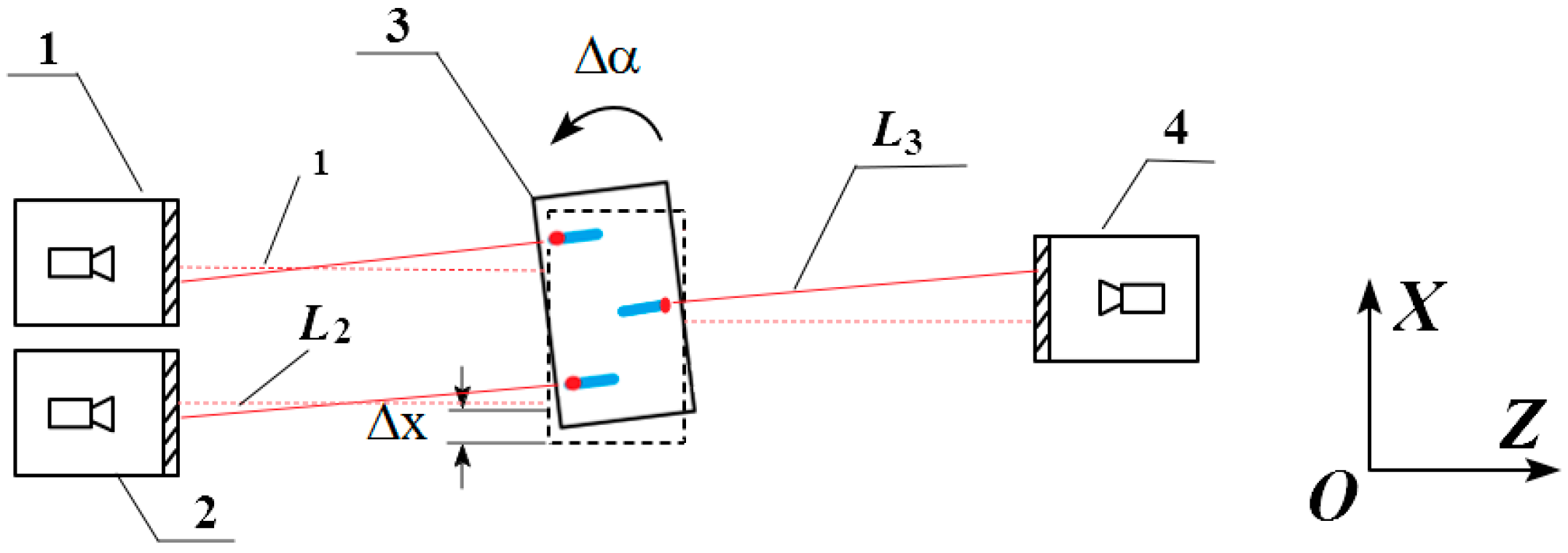
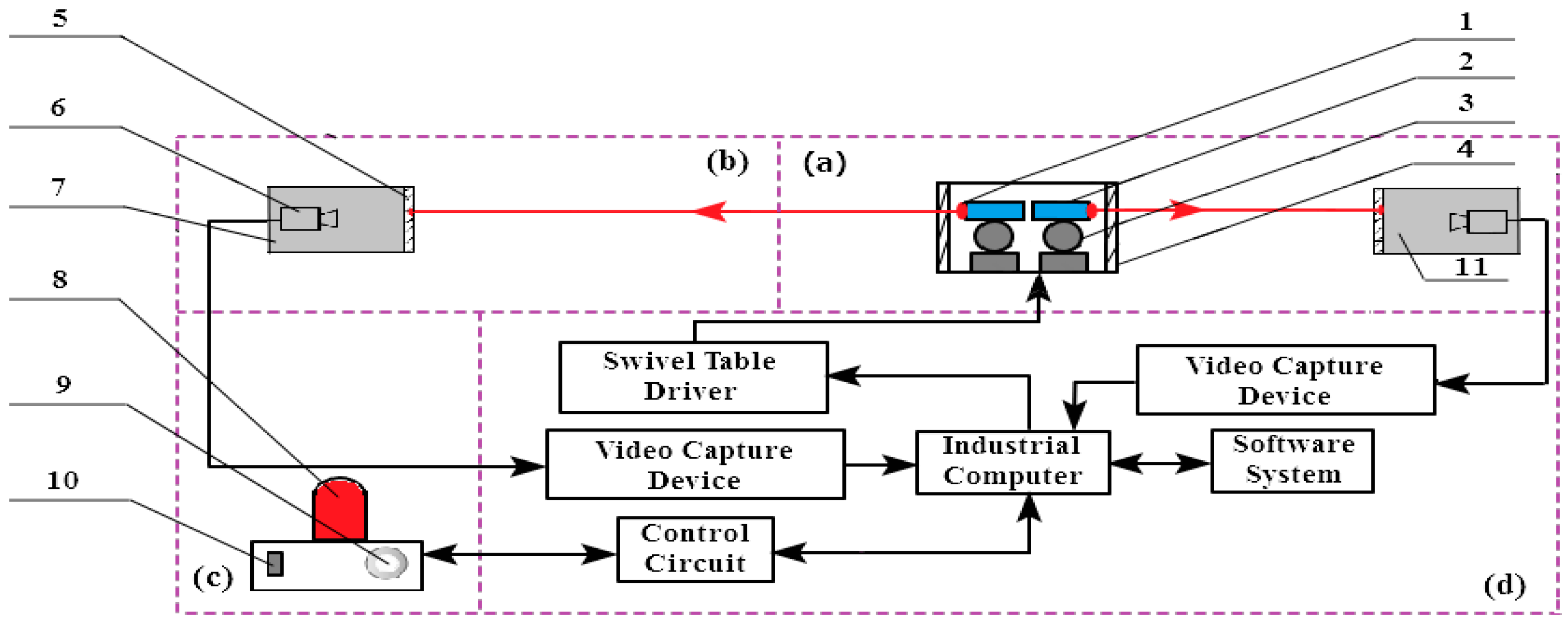
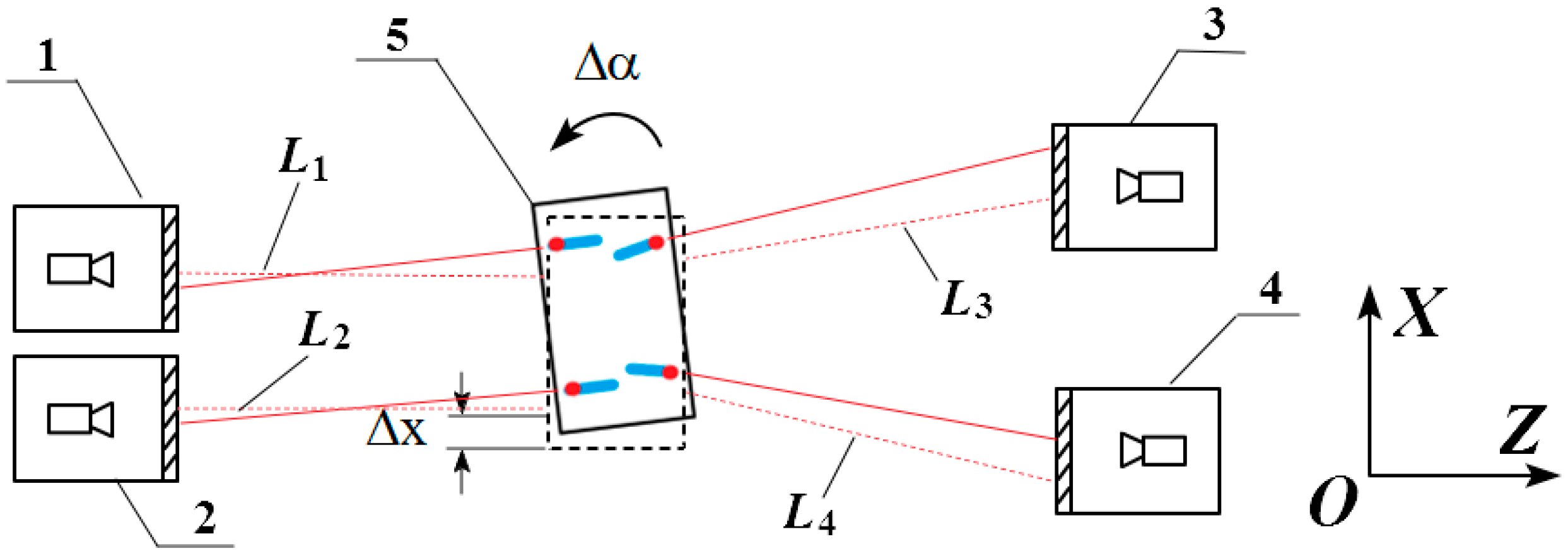
In order to reduce this error, a data compensation method is proposed here. The data compensation method uses two backward lasers in the laser transmitter module and two fixed distant reference monitoring image acquisition modules with higher stability to monitor the feasibility of the laser transmitter, as shown in
Figure 4, where
Ls represents the distance between the laser transmitter module and the image acquisition modules,
represents the horizontal rotation angle of the laser transmitter module, and
represents the displacement along the
x-axis of the laser transmitter module.
Given that
Ls were dozens of meters, small displacement and rotation angle will have no effect on these
Ls; that is, the lengths of
Ls were invariable before and after the position change of the laser transmitter module. With the two reference monitoring image acquisition modules, two laser spot position errors
and
can be obtained. The image acquisition module detecting displacement with error is
. The equations of two variables
and
were obtained, as shown in Equation (7):
According to Equation (10),
and
can be determined as shown in Equation (8):
Then, the detected displacement can be compensated in Equation (9):
Therefore, the detected displacement error caused by sudden vibration is compensated successfully.































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}