A Modified Method for Evaluating Sustainable Transport Solutions Based on AHP and Dempster–Shafer Evidence Theory

Abstract
:1. Introduction
2. Preliminaries
2.1. Dempster–Shafer Theory
2.2. Analytic Hierarchy Process
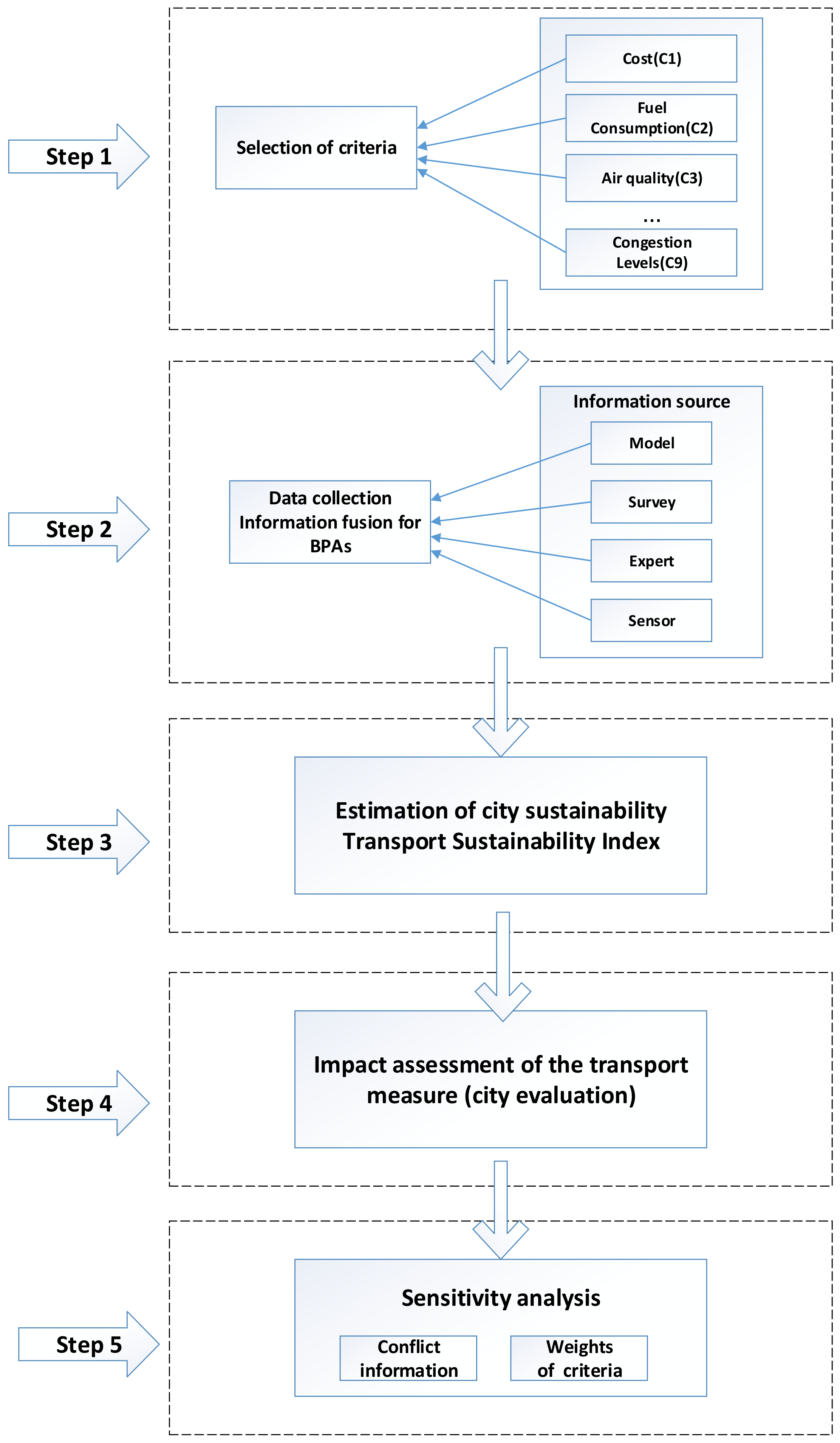
3. The Proposed Method
The Framework of the Proposed Method
- (1)
- “car-sharing solution will increase utility in terms of cost with the belief degree 0.25”.
- (2)
- “car-sharing solution will decrease utility in terms of cost with the belief degree 0.25”.
- (3)
- “the expert does not know whether the utility will increase or decrease with the belief degree 0.5”.
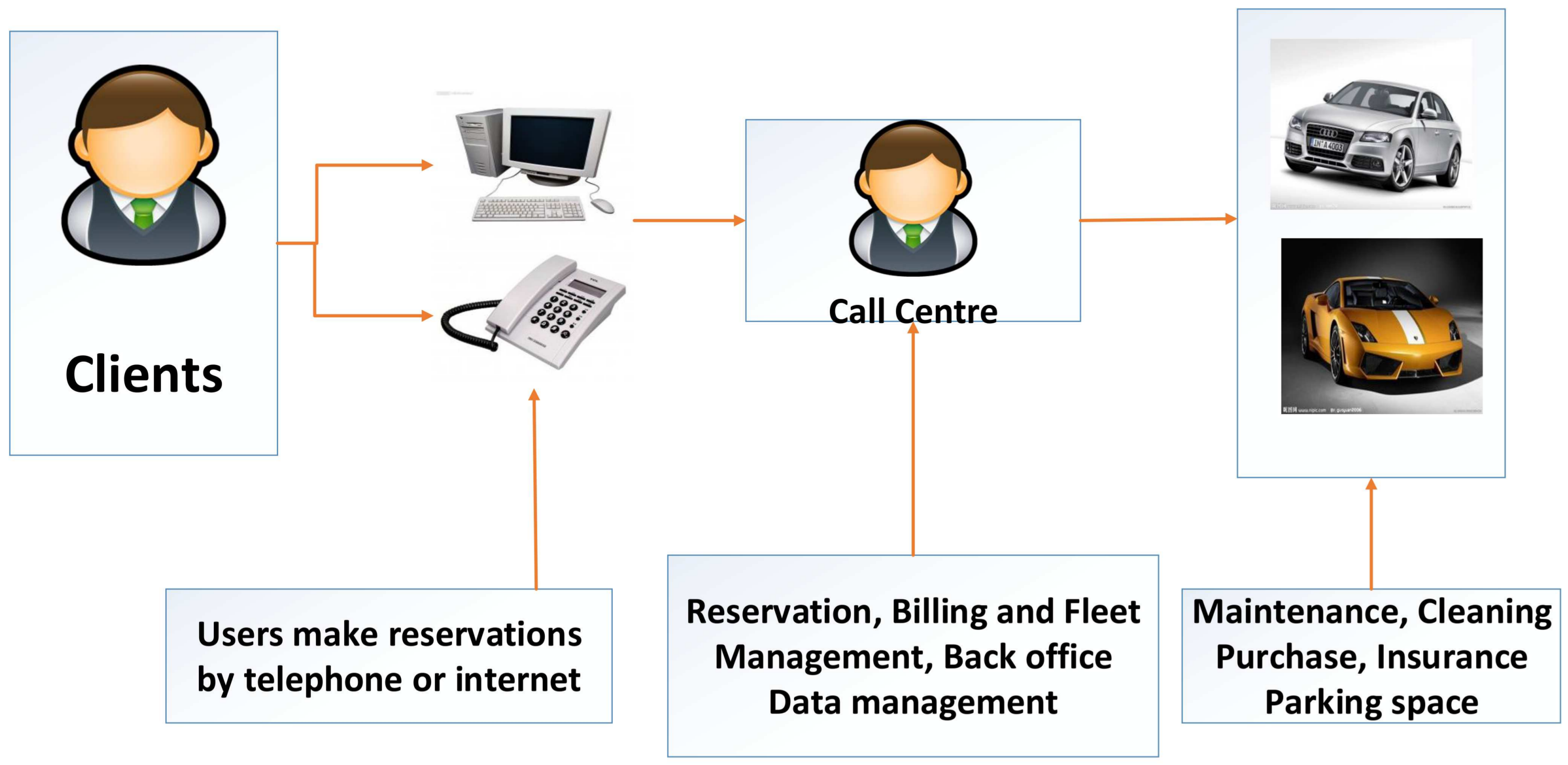
4. Car-Sharing Application
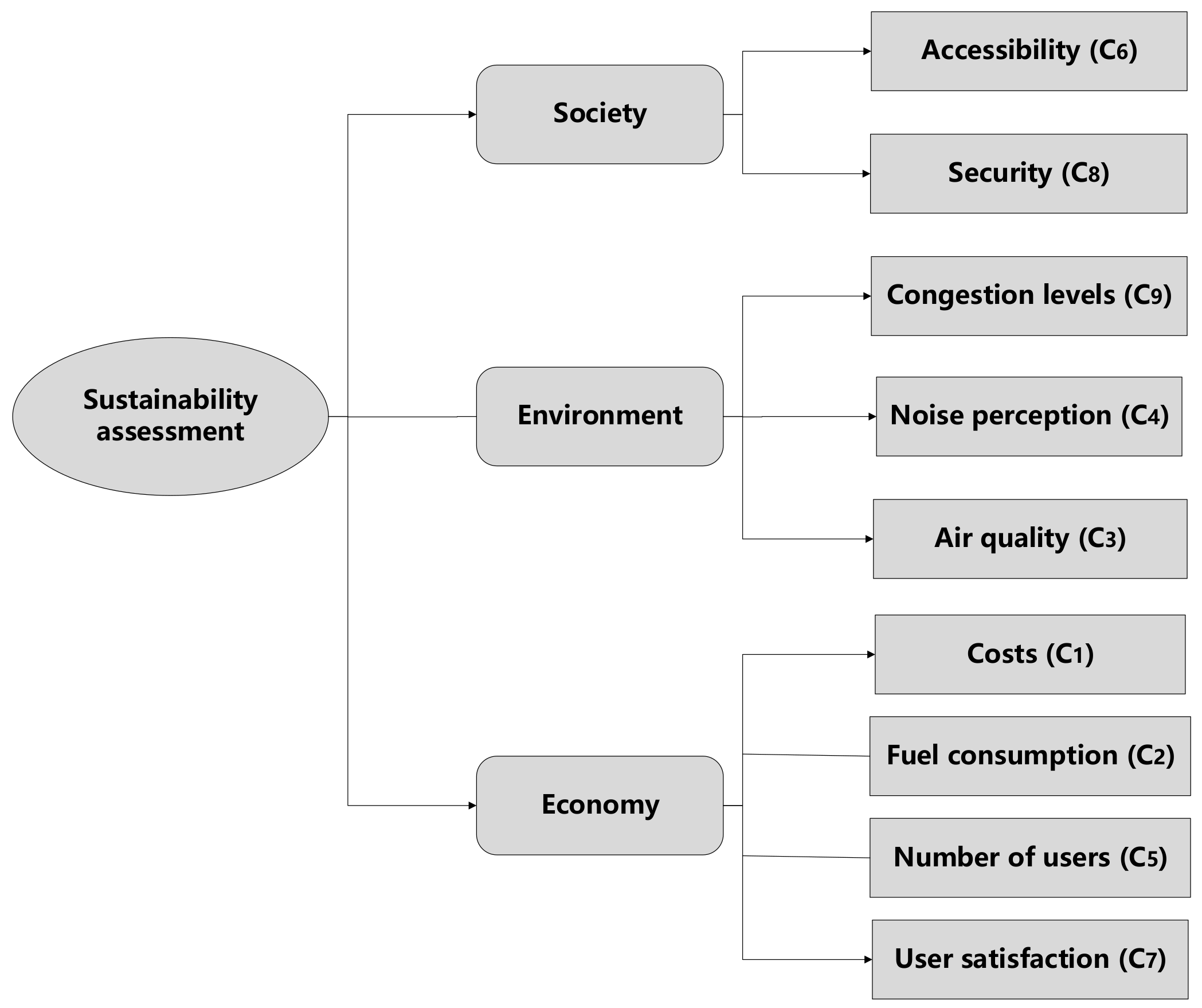
4.1. Selection of Criteria
4.2. Data Collection and Information Fusion for BPAs
4.3. Utilities of Estimation
4.4. Estimation of City Sustainability
4.5. Impact Assessment of the Transport Measure (Transport Solution Evaluation)
4.6. Sensitivity Analysis
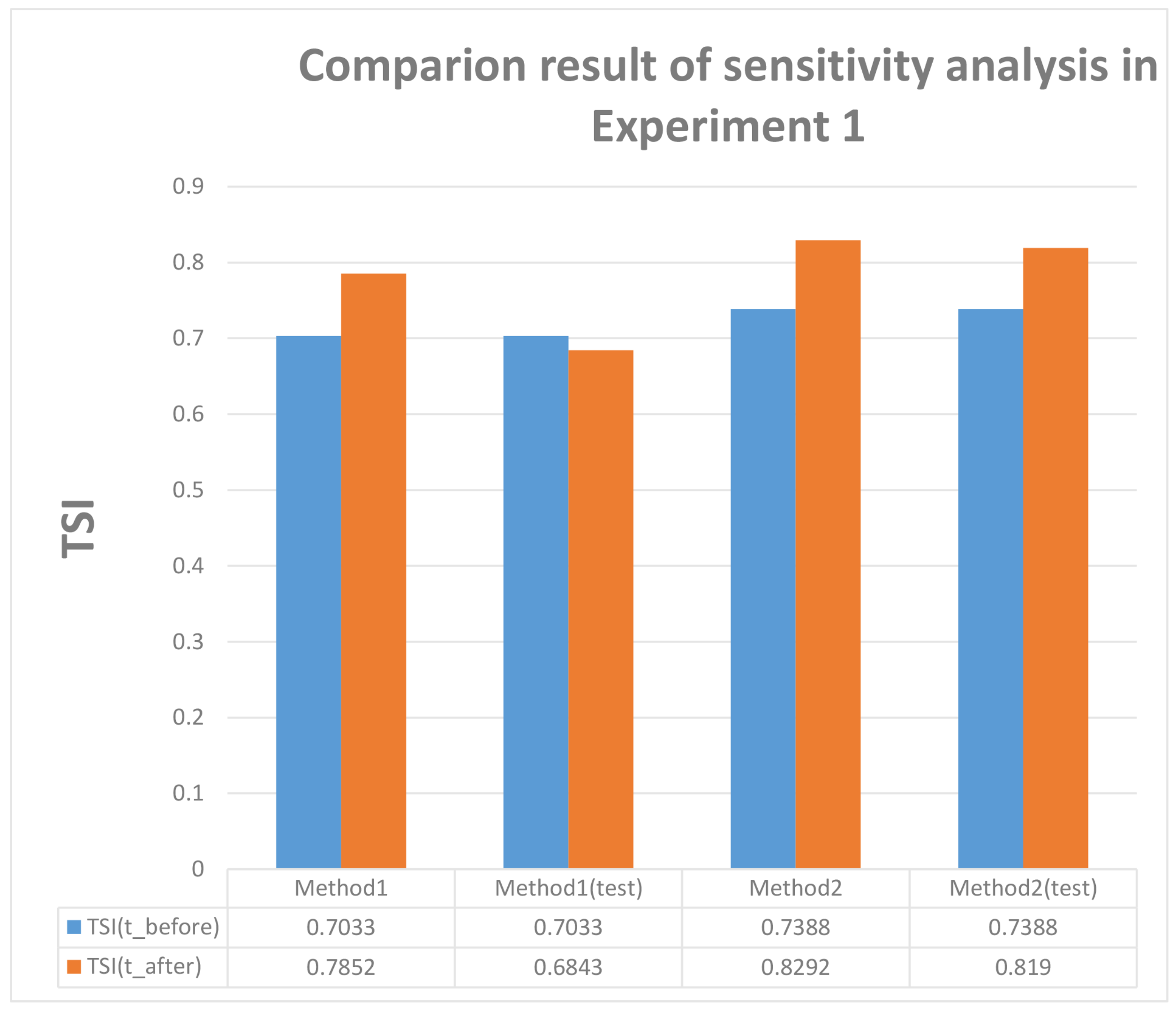
4.6.1. Experiment 1
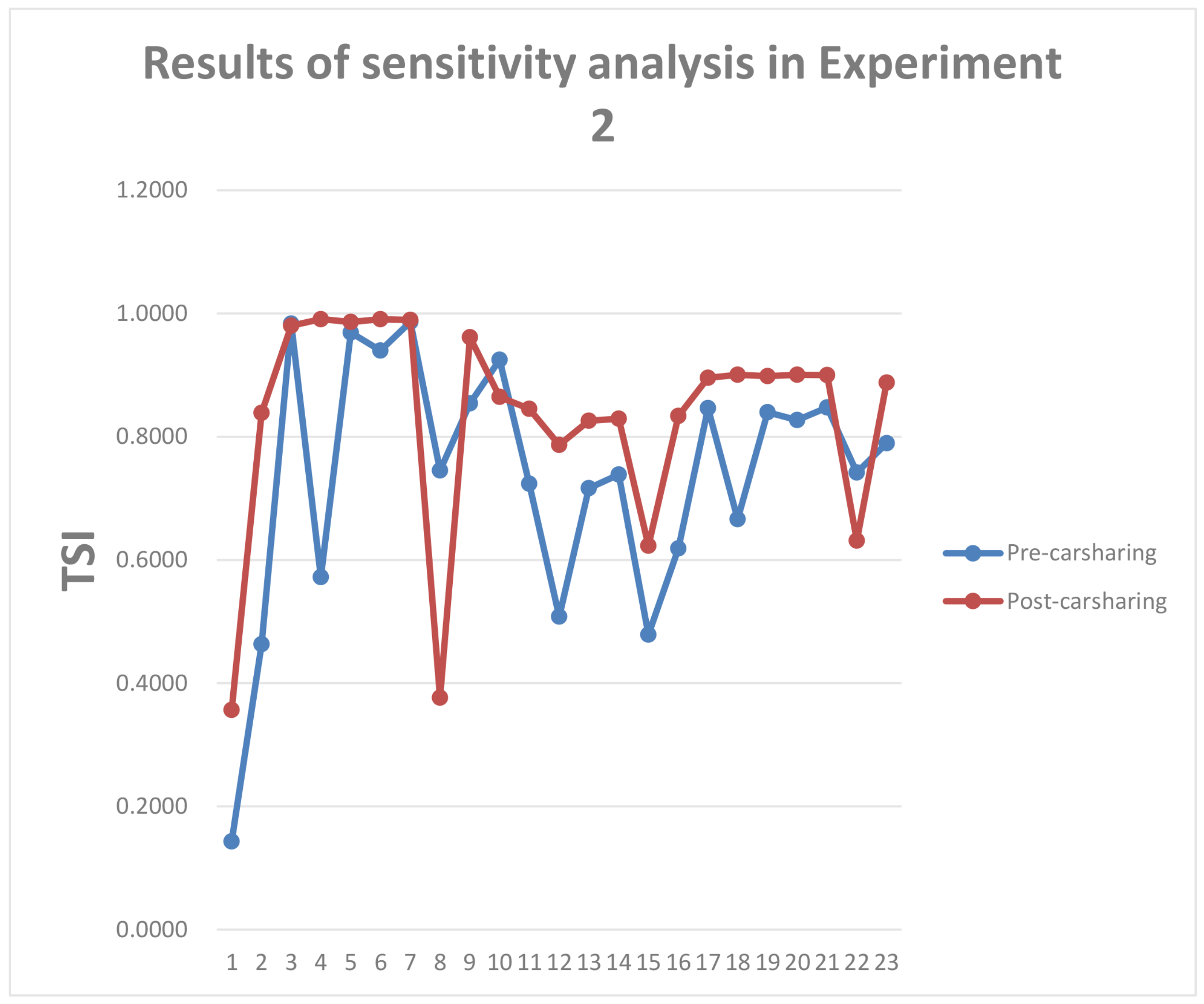
4.6.2. Experiment 2
- (1)
- Experiments 1–9 consider one criterion at a time with a maximum weight = 1 and allocate weight = 0 to the remaining eight criteria.
- (2)
- Experiment 10 provides equal weight = 0.2 to the criteria with the high utility values for increase (I) for post-test stage (i.e., , , , , ). The weight of the remaining criteria is equal to 0.
- (3)
- Experiment 11 gives a random allocation of weight to different criteria.
- (4)
- Experiment 12 provides equal weight = 0.25 to the criteria with low utility values for increase (I) for the post-test stage (i.e., , , , ).
- (5)
- Experiment 13 distributes equal weight = 0.1 to criteria with high utility values for increase (I) for the post-test stage (i.e., , , , , ). Equal value = 0.125 is given to criteria with low utility values for increase (I) for post-test stage (i.e., , , , ).
- (6)
- Experiment 14 sets 0.111 as the weight of all criteria.
- (7)
- Experiments 15–23 provide weight = 0.25 over one criteria and distribute the remaining 0.5 weight over eight criteria, making their criteria weight = 0.0625.
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Grant-Muller, S.; Usher, M. Intelligent Transport Systems: The Propensity for Environmental and Economic Benefits. Technol. Forecast. Soc. Chang. 2014, 82, 149–166. [Google Scholar] [CrossRef]
- Hsu, C.Y.; Yang, C.S.; Yu, L.C.; Lin, C.F.; Yao, H.H.; Chen, D.Y.; Lai, K.R.; Chang, P.C. Development of a Cloud-Based Service Framework for Energy Conservation in a Sustainable Intelligent Transportation System. Int. J. Prod. Econ. 2015, 164, 454–461. [Google Scholar] [CrossRef]
- Nita, M.R.; Badiu, D.L.; Onose, D.A.; Gavrilidis, A.A.; Gradinaru, S.R.; Nastase, I.I.; Lafortezza, R. Using Local Knowledge and Sustainable Transport to Promote a Greener City The Case of Bucharest, Romania. Environ. Res. 2018, 160, 331–338. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.L. City-Hubs: Sustainable and Efficient Urban Transport Interchanges. J. Transp. Geogr. 2017, 65, 200–201. [Google Scholar] [CrossRef]
- Al-Atawi, A.M.; Kumar, R.; Saleh, W. Transportation Sustainability Index for Tabuk City in Saudi Arabia: An Analytic Hierarchy Process. Transport 2016, 31, 47–55. [Google Scholar] [CrossRef]
- Le Pira, M.; Inturri, G.; Ignaccolo, M.; Pluchino, A. Analysis of AHP Methods and the Pairwise Majority Rule (PMR) for Collective Preference Rankings of Sustainable Mobility Solutions. Transp. Res. Procedia 2015, 10, 777–787. [Google Scholar] [CrossRef]
- Gunarathna, P.; Hassan, R. Sustainability assessment tool for road transport asset management practice. Road Transp. Res. 2016, 25, 15–26. [Google Scholar]
- Xu, S.; Jiang, W.; Deng, X.; Shou, Y. A modified Physarum-inspired model for the user equilibrium traffic assignment problem. Appl. Math. Modell. 2018, 55, 340–353. [Google Scholar] [CrossRef]
- Deakin, M.; Curwell, S.; Lombardi, P. Sustainable urban development: the framework and directory of assessment methods. J. Environ. Assess. Policy Manag. 2002, 4, 171–197. [Google Scholar]
- Parkin, J.; Wardman, M.; Page, M. Estimation of the determinants of bicycle mode share for the journey to work using census data. Transportation 2008, 35, 93–109. [Google Scholar] [CrossRef]
- Danilina, N.; Vlasov, D. Development of “Park-and-Ride” system as a tool for sustainable access control managing. In Proceedings of the Iop Conference Series-Earth and Environmental Science, Malang, Indonesia, 6–7 March 2017; Volume 90. [Google Scholar]
- Shaukat, N.; Khan, B.; Ali, S.M.; Mehmood, C.A.; Khan, J.; Farid, U.; Majid, M.; Anwar, S.M.; Jawad, M.; Ullah, Z. A survey on electric vehicle transportation within smart grid system. Renew. Sustain. Energy Rev. 2018, 81, 1329–1349. [Google Scholar] [CrossRef]
- LucianoBarcellos de Paula, F.A.S. Algorithms applied in decision-making for sustainable transport. J. Clean. Prod. 2018, 176, 1133–1143. [Google Scholar] [CrossRef]
- Bovy, P.H.; Hoogendoorn-Lanser, S. Modelling route choice behaviour in multi-modal transport networks. Transportation 2005, 32, 341–368. [Google Scholar] [CrossRef]
- Sumalee, A.; Uchida, K.; Lam, W.H. Stochastic multi-modal transport network under demand uncertainties and adverse weather condition. Transp. Res. Part C Emerg. Technol. 2011, 19, 338–350. [Google Scholar] [CrossRef]
- Jourquin, B.; Limbourg, S. Equilibrium traffic assignment on large Virtual Networks: Implementation issues and limits for multi-modal freight transport. Eur. J. Transp. Infrastruct. Res. 2006, 6, 205–228. [Google Scholar]
- Mihyeon Jeon, C.; Amekudzi, A. Addressing sustainability in transportation systems: definitions, indicators, and metrics. J. Infrastruct. Syst. 2005, 11, 31–50. [Google Scholar] [CrossRef]
- Litman, T.; Burwell, D. Issues in sustainable transportation. Int. J. Glob. Environ. Issues 2006, 6, 331–347. [Google Scholar] [CrossRef]
- Wellar, B. Sampler of Commentaries on Methods and Techniques that Could Be Used in Making Decisions about Identifying, Adopting, or Implementing Sustainable Transport Practices; Wellar Consulting Inc.: Ottawa, ON, Canada, 2009. [Google Scholar]
- Awasthi, A.; Chauhan, S.S. Using AHP and Dempster–Shafer theory for evaluating sustainable transport solutions. Environ. Modell. Softw. 2011, 26, 787–796. [Google Scholar] [CrossRef]
- Aroian, L.A. The probability function of the product of two normally distributed variables. Ann. Math. Stat. 1947, 18, 265–271. [Google Scholar] [CrossRef]
- Deng, Y. Generalized evidence theory. Appl. Intell. 2015, 43, 530–543. [Google Scholar] [CrossRef]
- Xiao, F. An Improved Method for Combining Conflicting Evidences Based on the Similarity Measure and Belief Function Entropy. Int. J. Fuzzy Syst. 2018, 20, 1256–1266. [Google Scholar] [CrossRef]
- Xiao, F.; Zhan, C.; Lai, H.; Tao, L.; Qu, Z. New Parallel Processing Strategies in Complex Event Processing Systems with Data Streams. Int. J. Distrib. Sens. Netw. 2017, 13, 1–15. [Google Scholar] [CrossRef]
- Xu, H.; Deng, Y. Dependent Evidence Combination Based on Shearman Coefficient and Pearson Coefficient. IEEE Access 2018, 6, 11634–11640. [Google Scholar] [CrossRef]
- Deng, X.; Xiao, F.; Deng, Y. An improved distance-based total uncertainty measure in belief function theory. Appl. Intell. 2017, 46, 898–915. [Google Scholar] [CrossRef]
- Jiang, W.; Chang, Y.; Wang, S. A method to identify the incomplete framework of discernment in evidence theory. Math. Probl. Eng. 2017, 2017. [Google Scholar] [CrossRef]
- Jiang, W.; Hu, W. An improved soft likelihood function for Dempster-Shafer belief structures. Int. J. Intell. Syst. 2018. [Google Scholar] [CrossRef]
- Jiang, W.; Wang, S. An Uncertainty Measure for Interval-valued Evidences. Int. J. Comput. Commun. Control 2017, 12, 631–644. [Google Scholar] [CrossRef]
- Deli Irfan, C.N. Intuitionistic fuzzy parameterized soft set theory and its decision making. Appl. Soft Comput. 2015, 28, 109–113. [Google Scholar] [CrossRef]
- Zheng, X.; Deng, Y. Dependence Assessment in Human Reliability Analysis Based on Evidence Credibility Decay Model and IOWA Operator. Ann. Nuclear Energy 2018, 112, 673–684. [Google Scholar] [CrossRef]
- Zhang, R.; Ashuri, B.; Deng, Y. A novel method for forecasting time series based on fuzzy logic and visibility graph. Adv. Data Anal. Classif. 2017, 11, 759–783. [Google Scholar] [CrossRef]
- Jiang, W.; Wei, B. Intuitionistic fuzzy evidential power aggregation operator and its application in multiple criteria decision-making. Int. J. Syst. Sci. 2018, 49, 582–594. [Google Scholar] [CrossRef]
- Aliev, R.; Alizadeh, A.; Huseynov, O.; Jabbarova, K. Z-Number-Based Linear Programming. Int. J. Intell. Syst. 2015, 30, 563–589. [Google Scholar] [CrossRef]
- Zadeh, L.A. A note on Z-numbers. Inf. Sci. 2011, 181, 2923–2932. [Google Scholar] [CrossRef]
- Kang, B.; Chhipi-Shrestha, G.; Deng, Y.; Hewage, K.; Sadiq, R. Stable strategies analysis based on the utility of Z-number in the evolutionary games. Appl. Math. Comput. 2018, 324, 202–217. [Google Scholar] [CrossRef]
- Bian, T.; Zheng, H.; Yin, L.; Deng, Y. Failure mode and effects analysis based on D numbers and TOPSIS. Qual. Reliab. Eng. Int. 2018. [Google Scholar] [CrossRef]
- Xiao, F. An Intelligent Complex Event Processing with D Numbers under Fuzzy Environment. Math. Probl. Eng. 2016. [Google Scholar] [CrossRef]
- Deng, X.; Deng, Y. D-AHP method with different credibility of information. Soft Comput. 2018. [Google Scholar] [CrossRef]
- Dempster, A.P. Upper and lower probabilities induced by a multivalued mapping. Ann. Math. Stat. 1967, 38, 325–339. [Google Scholar] [CrossRef]
- Shafer, G. A Mathematical Theory of Evidence; Princeton University Press: Princeton, NJ, USA, 1976; Volume 1. [Google Scholar]
- Yager, R.; Fedrizzi, M.; Kacprzyk, J. Advances in the Dempster-Shafer Theory of Evidence; Wiley: Hoboken, NJ, USA, 1994. [Google Scholar]
- Zadeh, L.A. A Simple View of the Dempster-Shafer Theory of Evidence and Its Implication for the Rule of Combination. AI Mag. 1986, 7, 85. [Google Scholar]
- Deng, X. Analyzing the monotonicity of belief interval based uncertainty measures in belief function theory. Int. J. Intell. Syst. 2018. [Google Scholar] [CrossRef]
- Neshat, A.; Pradhan, B. Risk assessment of groundwater pollution with a new methodological framework: Application of Dempster-Shafer theory and GIS. Nat. Hazards 2015, 78, 1565–1585. [Google Scholar] [CrossRef]
- Duan, Y.; Cai, Y.; Wang, Z.; Deng, X. A novel network security risk assessment approach by combining subjective and objective weights under uncertainty. Appl. Sci. 2018, 8, 428. [Google Scholar] [CrossRef]
- Deng, X.; Jiang, W. Dependence assessment in human reliability analysis using an evidential network approach extended by belief rules and uncertainty measures. Ann. Nuclear Energy 2018, 117, 183–193. [Google Scholar] [CrossRef]
- Liu, T.; Deng, Y.; Chan, F. Evidential supplier selection based on DEMATEL and game theory. Int. J. Fuzzy Syst. 2018, 20, 1321–1333. [Google Scholar] [CrossRef]
- He, Z.; Jiang, W. An evidential dynamical model to predict the interference effect of categorization on decision making. Knowl.-Based Syst. 2018. [Google Scholar] [CrossRef]
- Xiao, F. A Novel Evidence Theory and Fuzzy Preference Approach-Based Multi-Sensor Data Fusion Technique for Fault Diagnosis. Sensors 2017, 17, 2504. [Google Scholar] [CrossRef] [PubMed]
- Xiao, F.; Aritsugi, M.; Wang, Q.; Zhang, R. Efficient Processing of Multiple Nested Event Pattern Queries over Multi-Dimensional Event Streams based on a Triaxial Hierarchical Model. Artif. Intell. Med. 2016, 72, 56–71. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Li, M.; Deng, Y. Measure the structure similarity of nodes in complex networks based on relative entropy. Phys. A Stat. Mech. Appl. 2018, 491, 749–763. [Google Scholar] [CrossRef]
- Yin, L.; Deng, Y. Measuring transferring similarity via local information. Phys. A Stat. Mech. Appl. 2018, 498, 102–115. [Google Scholar] [CrossRef]
- Deng, X.; Han, D.; Dezert, J.; Deng, Y.; Shyr, Y. Evidence combination from an evolutionary game theory perspective. IEEE Trans. Cybern. 2016, 46, 2070–2082. [Google Scholar] [CrossRef] [PubMed]
- Deng, W.; Lu, X.; Deng, Y. Evidential Model Validation under Epistemic Uncertainty. Math. Probl. Eng. 2018. [Google Scholar] [CrossRef]
- Liang, W.; He, J.; Wang, S.; Yang, L.; Chen, F. Improved cluster collaboration algorithm based on wolf pack behavior. Clust. Comput. 2018. [Google Scholar] [CrossRef]
- Liu, W. Analyzing the degree of conflict among belief functions. Artif. Intell. 2006, 170, 909–924. [Google Scholar] [CrossRef] [Green Version]
- George, T.; Pal, N.R. Quantification of conflict in Dempster-Shafer framework: A new approach. Int. J. Gen. Syst. 1996, 24, 407–423. [Google Scholar] [CrossRef]
- Saaty, T.L. The Analytic Hierarchy Process: Planning, Priority Setting, Resources Allocation; McGraw: New York, NY, USA, 1980. [Google Scholar]
- Chin, K.S.; Wang, Y.M.; Poon, G.K.K.; Yang, J.B. Failure mode and effects analysis using a group-based evidential reasoning approach. Comput. Oper. Res. 2009, 36, 1768–1779. [Google Scholar] [CrossRef]
- Zhou, X.; Hu, Y.; Deng, Y.; Chan, F.T.S.; Ishizaka, A. A DEMATEL-Based Completion Method for Incomplete Pairwise Comparison Matrix in AHP. Ann. Oper. Res. 2018. [Google Scholar] [CrossRef]
- Jajac, N.; Knezic, S.; Babić, Z. Integration of multicriteria analysis into decision support concept for urban road infrastructure management. Croat. Oper. Res. Rev. 2010, 1, 74–82. [Google Scholar]
- Deng, X.; Jiang, W. An evidential axiomatic design approach for decision making using the evaluation of belief structure satisfaction to uncertain target values. Int. J. Intell. Syst. 2018, 33, 15–32. [Google Scholar] [CrossRef]
- Brundtland, G.H. Report of the World Commission on Environment and Development: “Our Common Future”; United Nations: New York, NY, USA, 1987. [Google Scholar]
- Awasthi, A.; Chauhan, S.S.; Hurteau, X.; Breuil, D. An analytical hierarchical process-based decision-making approach for selecting car-sharing stations in medium size agglomerations. Int. J. Inf. Decis. Sci. 2008, 1, 66–97. [Google Scholar] [CrossRef]
- Rohr, T.; Rovigo, M. Public service approach to car-sharing in mid-sized towns: The example of Belfort (France). IET Intell. Transp. Syst. 2017, 11, 403–410. [Google Scholar] [CrossRef]
- Fellows, N.; Pitfield, D. An economic and operational evaluation of urban car-sharing. Transp. Res. Part D Transp. Environ. 2000, 5, 1–10. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Value of | Interpretation |
|---|---|
| 1 | i and j are equally important |
| 3 | i is slightly more important than j |
| 5 | i is more important than j |
| 7 | i is strongly more important than j |
| 9 | i is absolutely more important than j |
| 2, 4, 6, 8 | intermediate values between the two adjacent judgements |
| Dimension | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|
| RI | 0.00 | 0.58 | 0.90 | 1.12 | 1.24 | 1.32 | 1.41 | 1.45 | 1.51 |
| Evaluation Criteria | Utility Values u(I), u(D), u(I,D) |
|---|---|
| Cost (), Fuel consumption (), Noise perception (), Congestion level () | (0, 1, 0.3) |
| Air quality (), Users numbers (), Spatial accessibility (), Satisfaction (), Security () | (1, 0, 0.3) |
| Evaluation Criteria | Expert | Model | Survey | Sensors | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| I | D | I | D | I | D | I | D | |||||
| 0.25 | 0.25 | 0.5 | 0.6 | 0.2 | 0.2 | 0.5 | 0.2 | 0.3 | 0.5 | 0.15 | 0.35 | |
| 0.3 | 0.3 | 0.4 | 0.4 | 0.2 | 0.4 | 0.4 | 0.2 | 0.4 | 0.2 | 0.5 | 0.3 | |
| 0.65 | 0.15 | 0.2 | 0.7 | 0.2 | 0.1 | 0.6 | 0.2 | 0.2 | 0.8 | 0.1 | 0.1 | |
| 0.25 | 0.65 | 0.1 | 0.8 | 0.1 | 0.1 | 0.5 | 0.2 | 0.3 | 0.1 | 0.8 | 0.1 | |
| 0.7 | 0.2 | 0.1 | 0.2 | 0.1 | 0.7 | 0.8 | 0.1 | 0.1 | 0.6 | 0.1 | 0.3 | |
| 0.5 | 0.3 | 0.2 | 0.6 | 0.1 | 0.3 | 0.5 | 0.2 | 0.3 | 0.7 | 0.1 | 0.2 | |
| 0.6 | 0.1 | 0.3 | 0.7 | 0.1 | 0.2 | 0.6 | 0.1 | 0.3 | 0.8 | 0.1 | 0.1 | |
| 0.4 | 0.3 | 0.3 | 0.4 | 0.2 | 0.4 | 0.4 | 0.2 | 0.4 | 0.5 | 0.3 | 0.2 | |
| 0.4 | 0.4 | 0.2 | 0.1 | 0.5 | 0.4 | 0.2 | 0.5 | 0.3 | 0.2 | 0.6 | 0.2 | |
| Evaluation Criteria | Expert | Model | Survey | Sensors | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| I | D | I | D | I | D | I | D | |||||
| 0.3 | 0.2 | 0.5 | 0.4 | 0.2 | 0.4 | 0.2 | 0.1 | 0.7 | 0.1 | 0.3 | 0.6 | |
| 0.2 | 0.5 | 0.3 | 0.1 | 0.5 | 0.4 | 0.2 | 0.3 | 0.5 | 0.2 | 0.4 | 0.4 | |
| 0.6 | 0.1 | 0.3 | 0.7 | 0.1 | 0.2 | 0.6 | 0.2 | 0.2 | 0.7 | 0.2 | 0.1 | |
| 0.1 | 0.6 | 0.3 | 0.1 | 0.8 | 0.1 | 0.2 | 0.7 | 0.1 | 0.2 | 0.6 | 0.2 | |
| 0.8 | 0.1 | 0.1 | 0.7 | 0.1 | 0.2 | 0.6 | 0.3 | 0.1 | 0.8 | 0.1 | 0.1 | |
| 0.6 | 0.1 | 0.3 | 0.8 | 0.1 | 0.1 | 0.6 | 0.3 | 0.1 | 0.7 | 0.1 | 0.2 | |
| 0.7 | 0.1 | 0.2 | 0.8 | 0.1 | 0.1 | 0.6 | 0.2 | 0.2 | 0.6 | 0.1 | 0.3 | |
| 0.25 | 0.4 | 0.35 | 0.3 | 0.3 | 0.4 | 0.2 | 0.3 | 0.5 | 0.2 | 0.4 | 0.4 | |
| 0.2 | 0.5 | 0.3 | 0.1 | 0.7 | 0.2 | 0.2 | 0.6 | 0.2 | 0.2 | 0.4 | 0.4 | |
| Evaluation Criteria | Pre-Test Stage | Post-Test Stage | ||||
|---|---|---|---|---|---|---|
| I | D | I | D | |||
| 0.8413 | 0.1365 | 0.0222 | 0.5645 | 0.3226 | 0.1129 | |
| 0.5039 | 0.4488 | 0.0472 | 0.1234 | 0.8225 | 0.0541 | |
| 0.9831 | 0.0161 | 0.0008 | 0.9796 | 0.0189 | 0.0015 | |
| 0.4260 | 0.5714 | 0.0026 | 0.0088 | 0.9908 | 0.0004 | |
| 0.9680 | 0.0285 | 0.0035 | 0.9861 | 0.0132 | 0.0008 | |
| 0.9375 | 0.0550 | 0.0075 | 0.9907 | 0.0089 | 0.0004 | |
| 0.9855 | 0.0117 | 0.0027 | 0.9891 | 0.0098 | 0.0010 | |
| 0.7379 | 0.2388 | 0.0233 | 0.3566 | 0.5778 | 0.0657 | |
| 0.1377 | 0.8503 | 0.0120 | 0.0343 | 0.9598 | 0.0060 | |
| Evaluation Criteria | At the Pre-Test Stage | At the Post-Test Stage |
|---|---|---|
| 0.1432 | 0.3565 | |
| 0.4630 | 0.8387 | |
| 0.9834 | 0.9800 | |
| 0.5722 | 0.9909 | |
| 0.9691 | 0.9863 | |
| 0.9398 | 0.9908 | |
| 0.9864 | 0.9894 | |
| 0.7449 | 0.3763 | |
| 0.8539 | 0.9615 |
| Evaluation Criteria | Anjali Awasthi et al.’s Method | Our Proposed Method | ||||
|---|---|---|---|---|---|---|
| I | D | I | D | |||
| 0.0274 | 0.9589 | 0.0137 | 0.2258 | 0.5053 | 0.2689 | |
| 0.0146 | 0.4380 | 0.5474 | 0.2296 | 0.3596 | 0.4108 | |
| 0.9910 | 0.0067 | 0.0022 | 0.5893 | 0.2087 | 0.2018 | |
| 0.0020 | 0.0030 | 0.9951 | 0.2026 | 0.2399 | 0.5574 | |
| 0 | 0 | 1.0000 | 0.6913 | 0.1894 | 0.1932 | |
| 0.9956 | 0.0030 | 0.0015 | 0.5946 | 0.2373 | 0.1681 | |
| 0.9931 | 0.0059 | 0.0010 | 0.5771 | 0.2566 | 0.1661 | |
| 0.0661 | 0.6167 | 0.3172 | 0.2529 | 0.3743 | 0.3727 | |
| 0.0089 | 0.0536 | 0.9375 | 0.2290 | 0.3350 | 0.4359 | |
| Evaluation Criteria | Anjali Awasthi et al.’s Method | Our Proposed Method |
|---|---|---|
| 0.1432 | 0.3565 | |
| 0.4630 | 0.8387 | |
| 0.9834 | 0.9800 | |
| 0.5722 | 0.9909 | |
| 0 | 0.9846 | |
| 0.9398 | 0.9908 | |
| 0.9864 | 0.9894 | |
| 0.7449 | 0.3763 | |
| 0.8539 | 0.9615 |
| Anjali Awasthi et al.’s Method | Our Proposed Method | |
|---|---|---|
| TSI() | 0.7033 | 0.7388 |
| TSI() | 0.6843 | 0.8190 |
| Δ TSI | TSI() > TSI() | TSI() < TSI() |
| Transport solution evaluation | Negative | Positive |
| Transport solution evaluation (without conflict) | Positive | Positive |
| Experiment 2 | Weights of Criteria | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 2 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 3 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| 4 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| 5 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 |
| 6 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 |
| 7 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 |
| 8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
| 9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |
| 10 | 0 | 0 | 0.2 | 0 | 0.2 | 0.2 | 0.2 | 0.2 | 0 |
| 11 | 0.1 | 0.1 | 0.2 | 0.2 | 0.05 | 0.1 | 0.05 | 0.1 | 0.1 |
| 12 | 0.25 | 0.25 | 0 | 0.25 | 0 | 0 | 0 | 0 | 0.25 |
| 13 | 0.125 | 0.125 | 0.1 | 0.125 | 0.1 | 0.1 | 0.1 | 0.1 | 0.125 |
| 14 | 0.111 | 0.111 | 0.111 | 0.111 | 0.111 | 0.111 | 0.111 | 0.111 | 0.111 |
| 15 | 0.5 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.0625 |
| 16 | 0.0625 | 0.5 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.0625 |
| 17 | 0.0625 | 0.0625 | 0.5 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.0625 |
| 18 | 0.0625 | 0.0625 | 0.0625 | 0.5 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.0625 |
| 19 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.5 | 0.0625 | 0.0625 | 0.0625 | 0.0625 |
| 20 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.5 | 0.0625 | 0.0625 | 0.0625 |
| 21 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.5 | 0.0625 | 0.0625 |
| 22 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.5 | 0.0625 |
| 23 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.0625 | 0.5 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Deng, X. A Modified Method for Evaluating Sustainable Transport Solutions Based on AHP and Dempster–Shafer Evidence Theory. Appl. Sci. 2018, 8, 563. https://doi.org/10.3390/app8040563
Chen L, Deng X. A Modified Method for Evaluating Sustainable Transport Solutions Based on AHP and Dempster–Shafer Evidence Theory. Applied Sciences. 2018; 8(4):563. https://doi.org/10.3390/app8040563
Chicago/Turabian StyleChen, Luyuan, and Xinyang Deng. 2018. "A Modified Method for Evaluating Sustainable Transport Solutions Based on AHP and Dempster–Shafer Evidence Theory" Applied Sciences 8, no. 4: 563. https://doi.org/10.3390/app8040563
APA StyleChen, L., & Deng, X. (2018). A Modified Method for Evaluating Sustainable Transport Solutions Based on AHP and Dempster–Shafer Evidence Theory. Applied Sciences, 8(4), 563. https://doi.org/10.3390/app8040563