Signal Source Localization of Multiple Robots Using an Event-Triggered Communication Scheme


Abstract
:1. Introduction
2. Preliminaries
2.1. Dynamics of Mobile Robots
2.2. Communication Topologies
3. Decision-Control Approach with an Event-Triggered Communication Scheme
3.1. Decision-Making for the Position of the Signal Source
- (i)
- We first generate N particles, which are uniformly distributed in the search range.
- (ii)
- According to Equation (10), the prediction signal strength () of the m-th particle for the i-th robot at time t can be described by:where is the position of the m-th particle for the i-th robot at time t; R represents the variance of noise; is a random number in [0,1]; can be obtained according to the real signal transmission model.
- (iii)
- Further, the normalizing weight is computed by:
- (iv)
- Based on the normalizing weight , we conduct a resampling process for particles, that is we remove the low weight particles and copy the high weight particles. These resampled particles represent the probability distribution of the real state. Hence, the possible position of the signal source can be estimated by:where is the position of the estimated signal source for the i-th robot at time t. Further, considering the estimated positions from other robots, we have:where is the element of the adjacency matrix A and as the estimated position of signal source is used in the following simulations and experiments.
3.2. Cooperative Control with an Event-Triggered Communication Scheme
3.3. Convergence Analysis
3.4. Velocity Design of the Virtual Leader
| Algorithm 1 Decision-control approach with an event-triggered communication scheme. |
| /*Initialization*/ Initialize the parameters of the particle filter N, R and , ; Initialize the parameters , and of the consensus control (18) and the event-triggered rule (16), the position and the velocity of the i-th robot; /*Main Body*/ repeat Receive its neighbors’ information; Detect the new signal strength at the position ; Calculate the prediction signal strength () based on (11); Give the normalizing weight in (13), and obtain the estimated position of signal source in terms of (15); Compute the event-triggered condition in (16) and (17); if then Send the estimated position of signal source , the position of the robot and the velocity of the robot to its neighbors; end if if then Calculate the control input in (18); According to (5), obtain the force and torque , and give the applied torques for the left wheel and the right wheel in (6) and (7), respectively. end if until The termination condition is satisfied. |
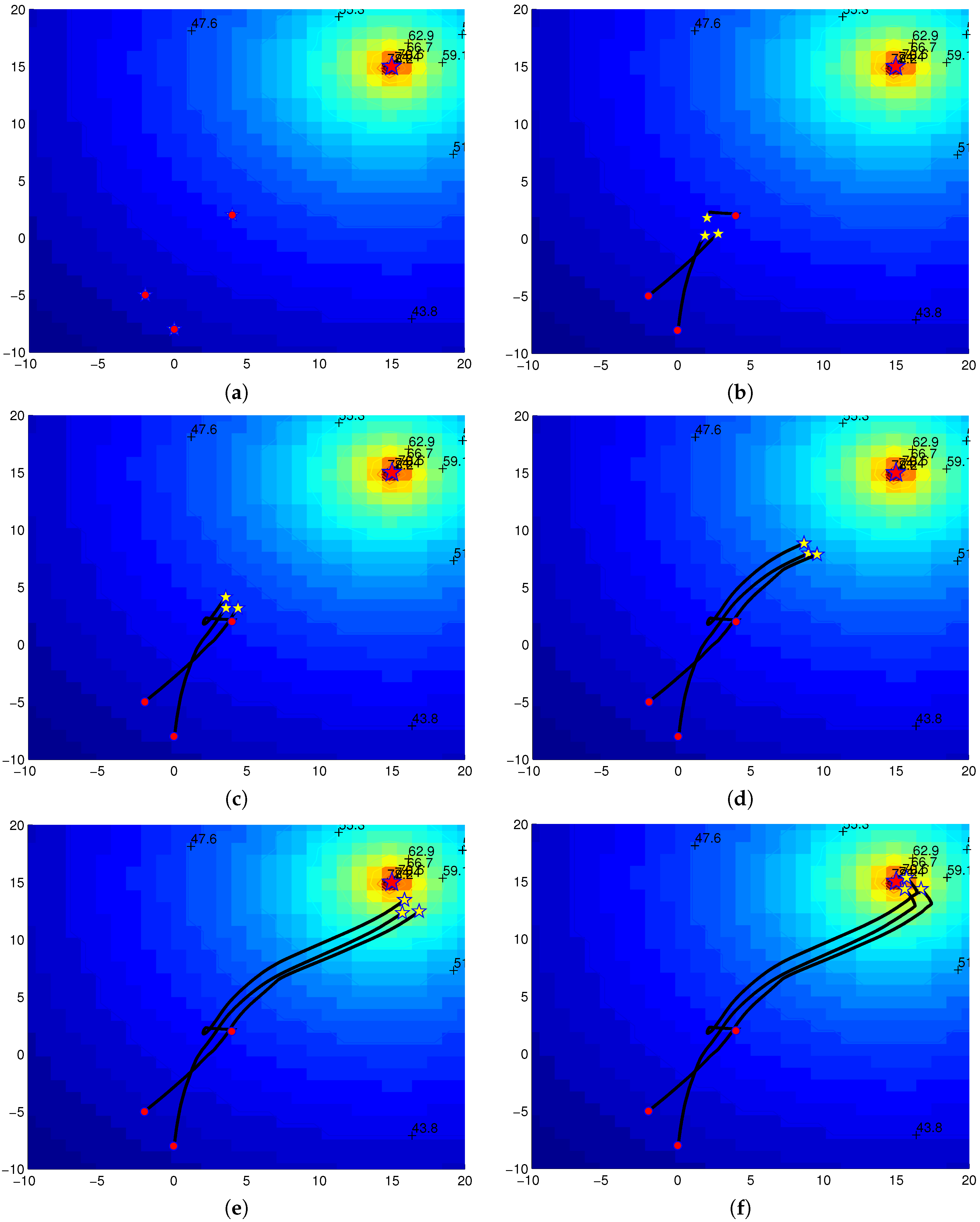
4. Simulation Results
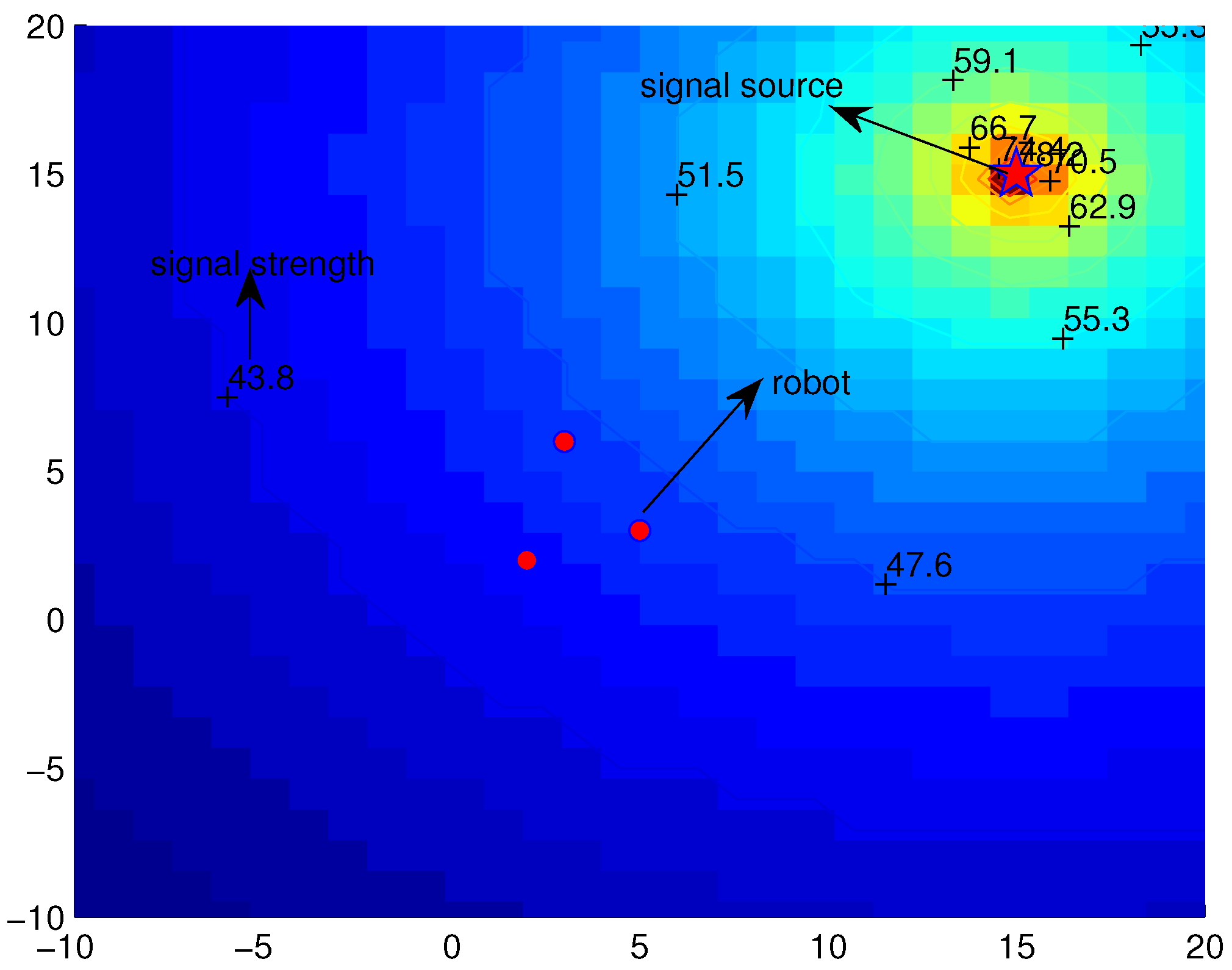
4.1. Simulation Environment
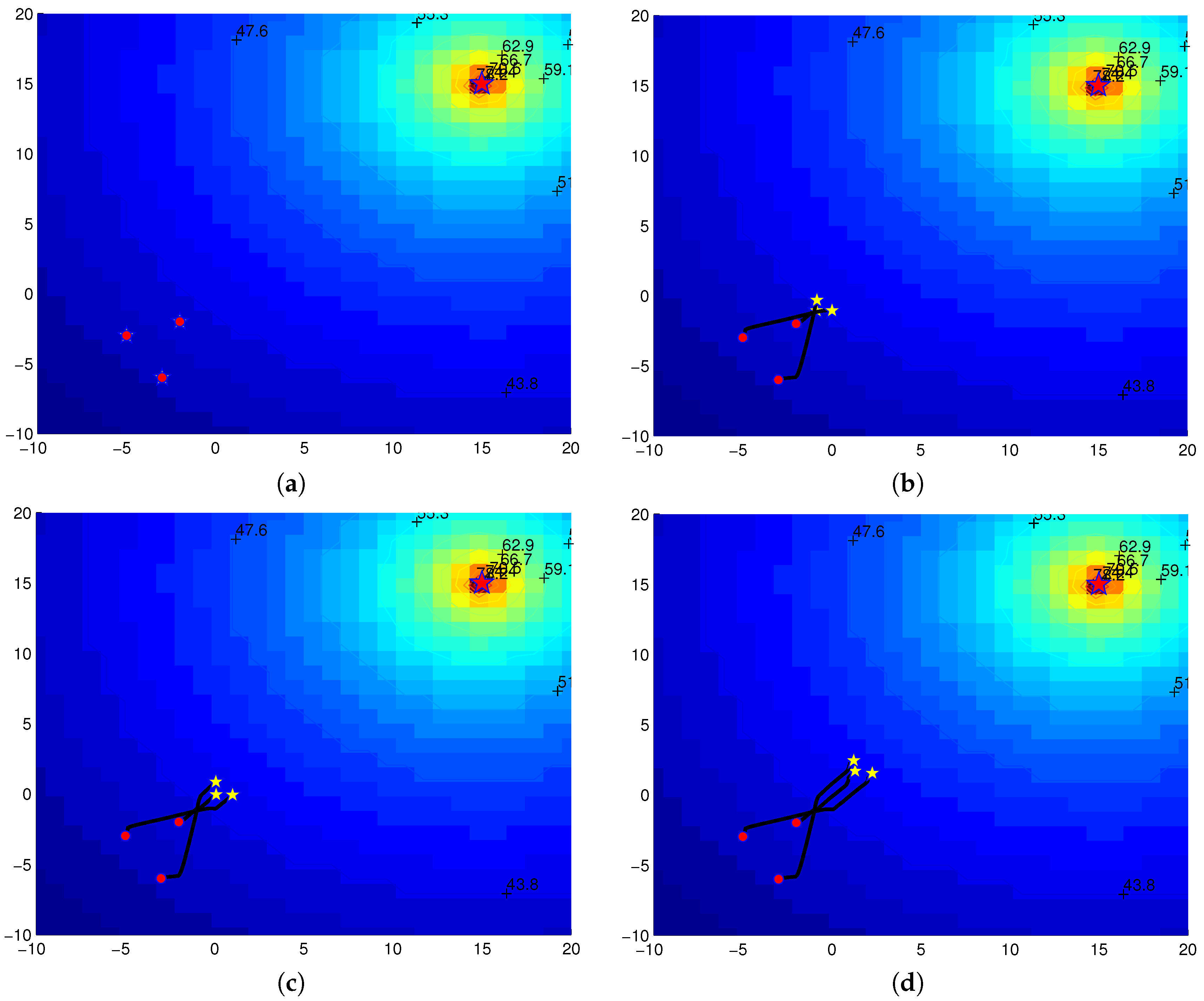
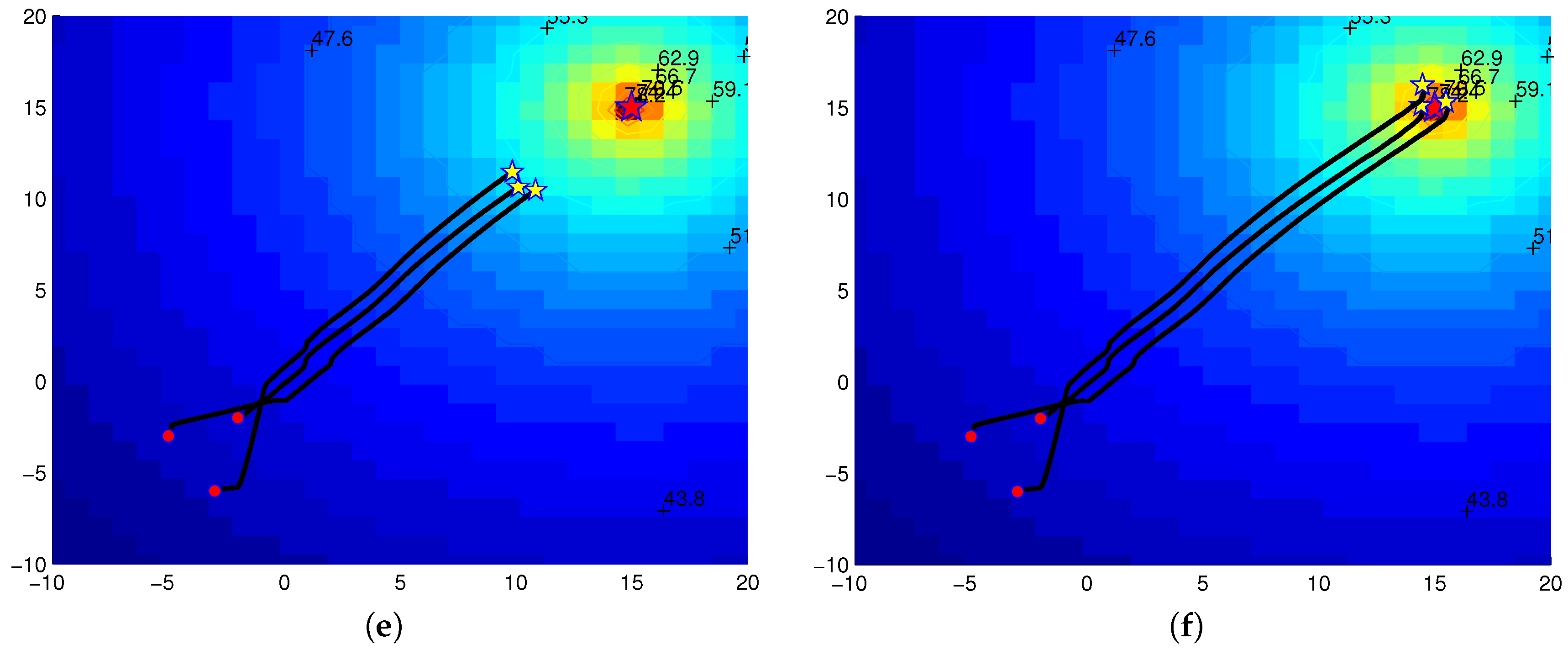
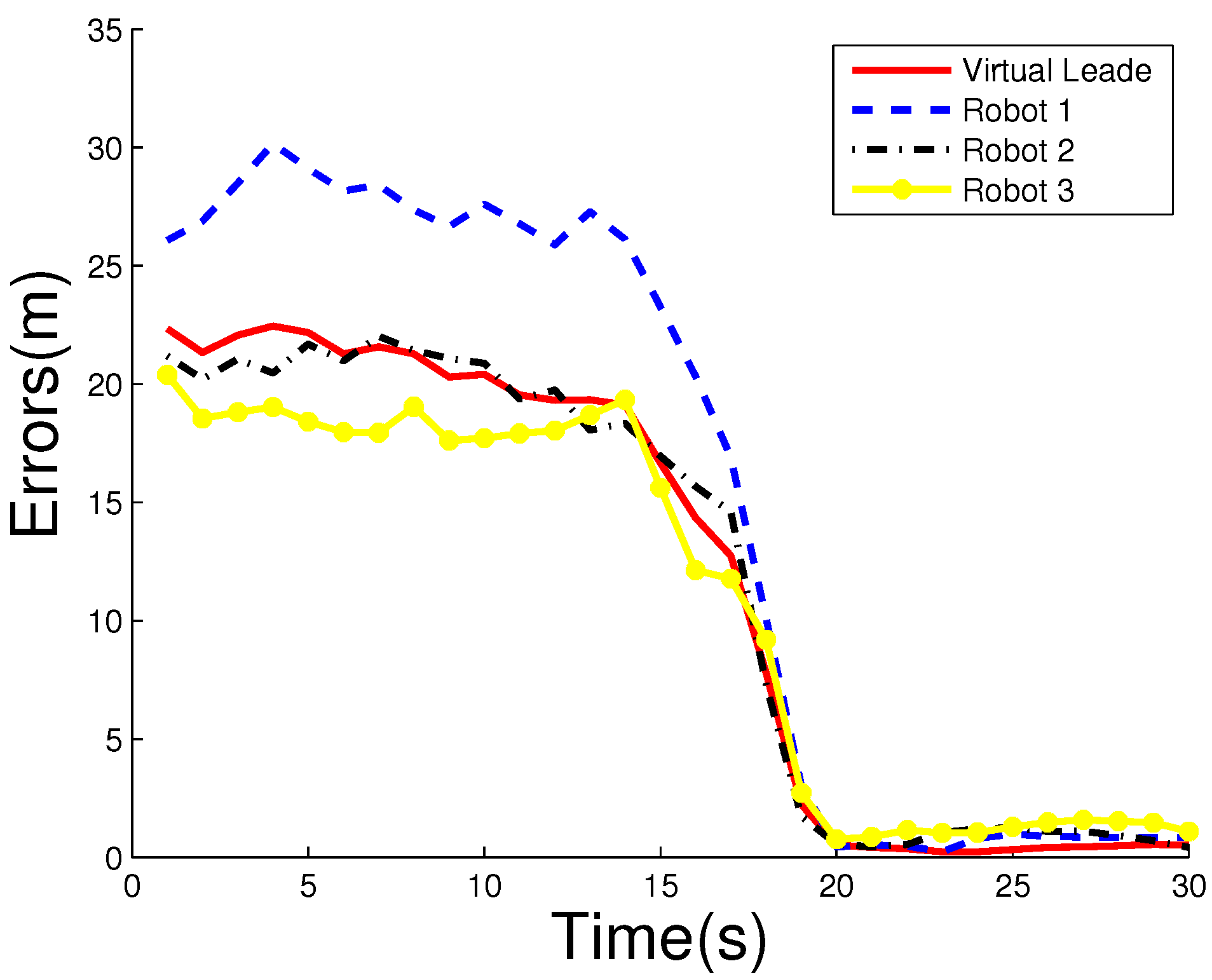
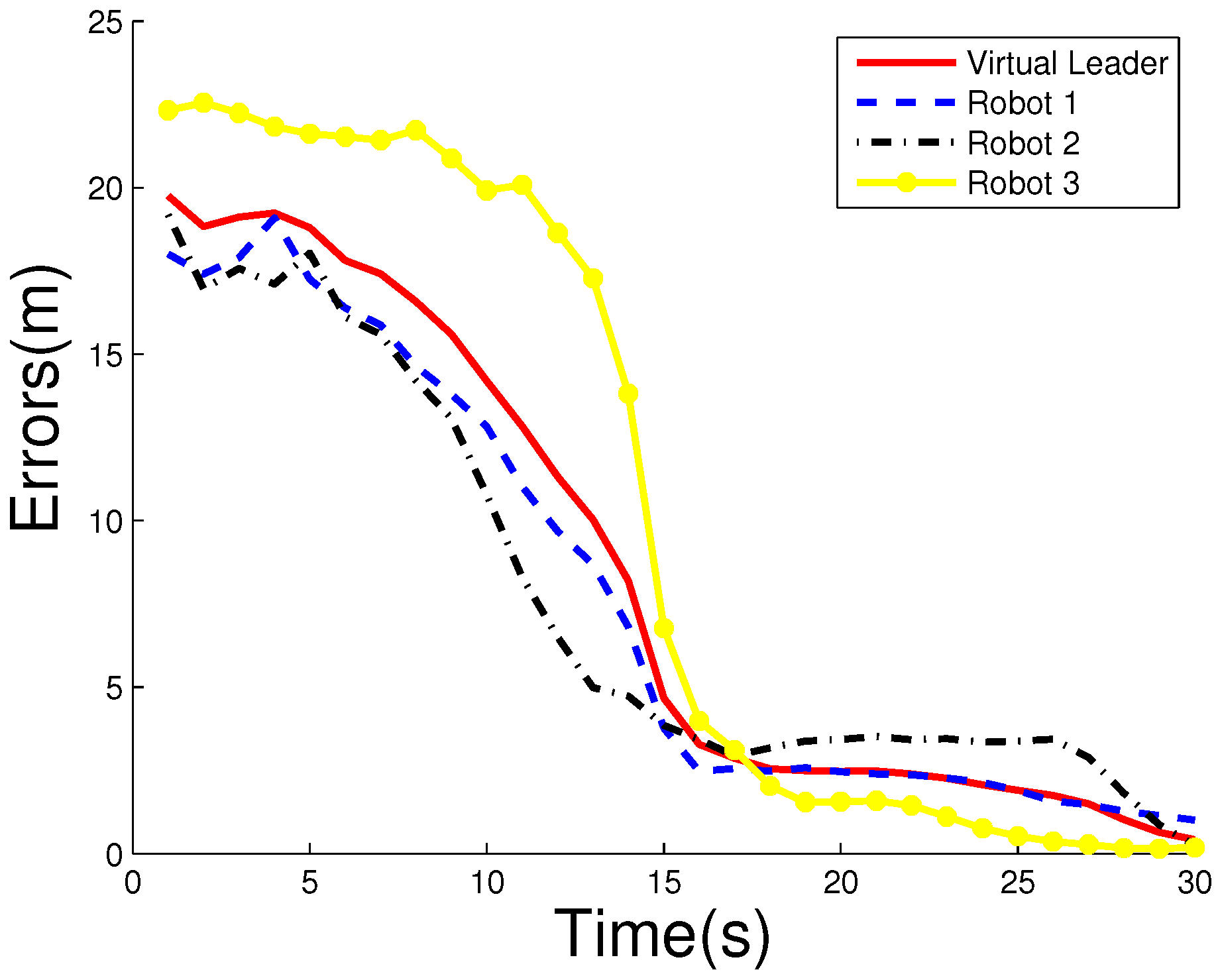
4.2. Cooperative Control and Performance Metrics
4.3. Case 1: The Variance of Noise
4.4. Case 2: The Variance of Noise
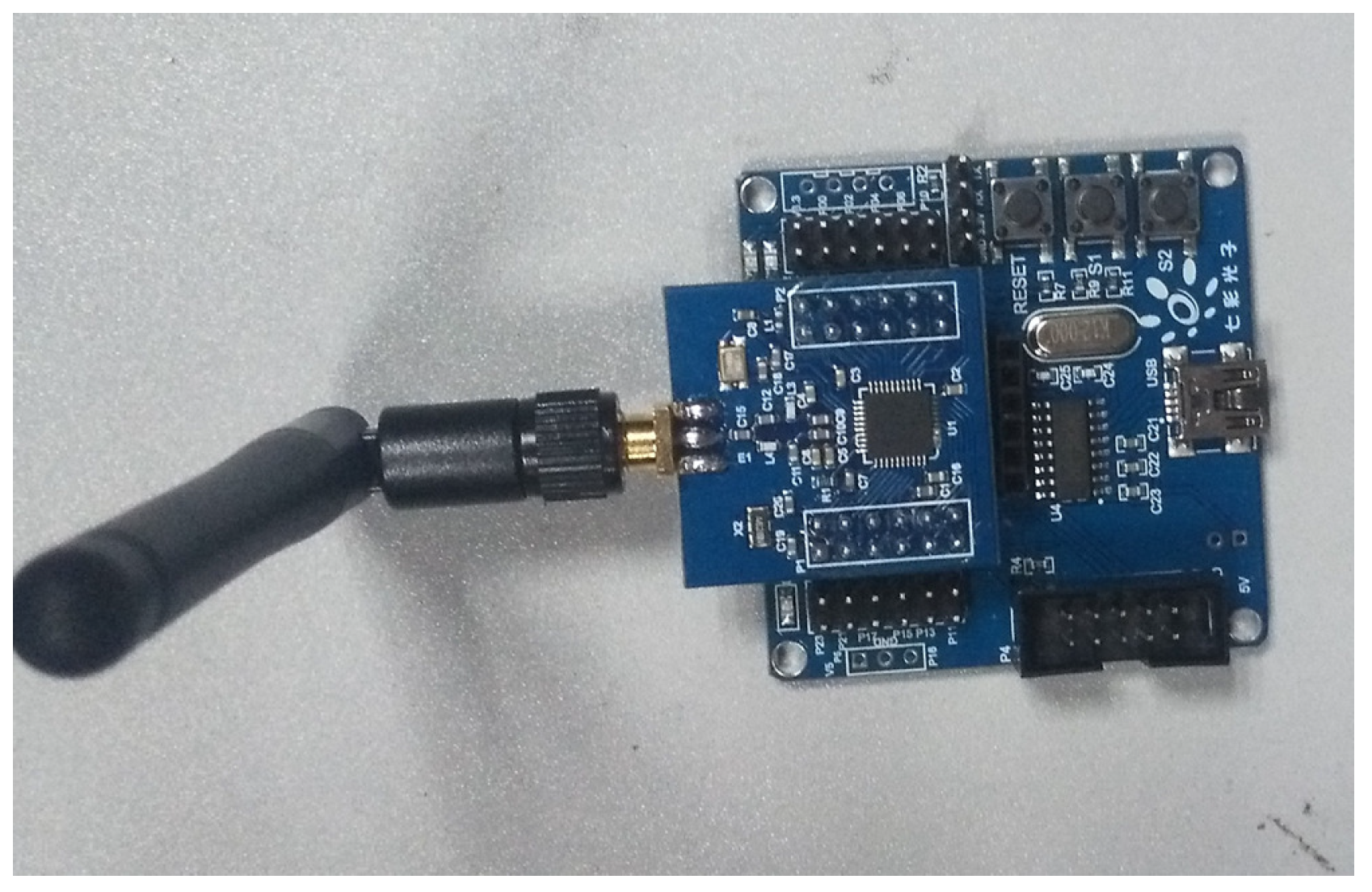
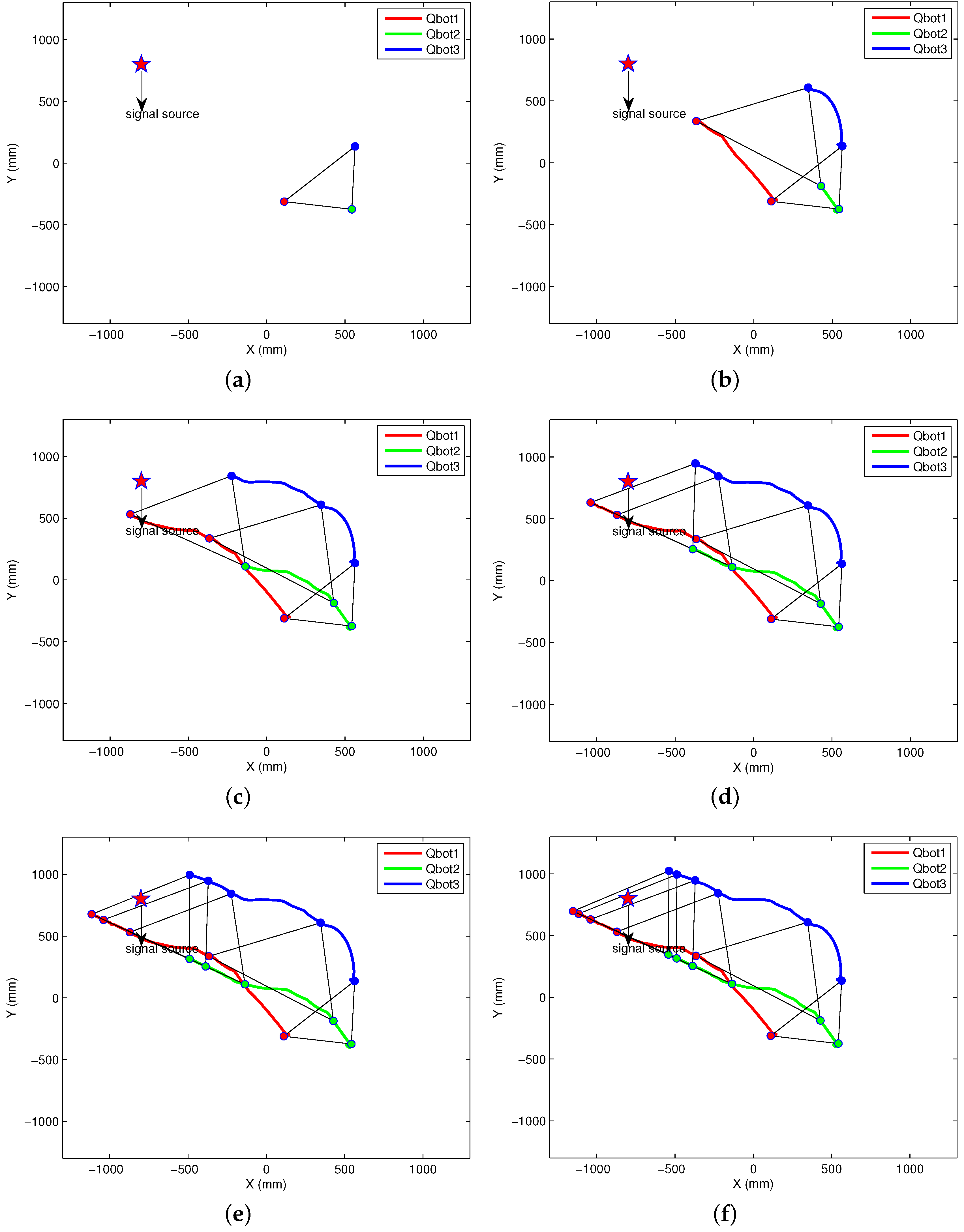
5. Experimental Results
5.1. Experimental Setup
5.2. Experimental Results
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Nomenclature
| Linear velocity | |
| Angular velocity | |
| Torque | |
| Applied torques for the left wheel | |
| Applied torques for the right wheel | |
| Orientation angle | |
| A | Adjacency matrix |
| Element of an adjacency matrix | |
| b | Radius of the wheel |
| e | State error |
| Velocity error | |
| Position error | |
| F | Force |
| f | Signal transmission model |
| Communication frequency | |
| Condition of event triggered | |
| Undirected graph | |
| Extension of graph | |
| i | Serial number of robot |
| Control input of the i-th robot | |
| J | Moment of inertia |
| Moment of inertia of the wheel | |
| l | Axis length between two wheels |
| Distance between the hand position and the center position | |
| Laplacian matrix of the graph | |
| Localization error | |
| m | Mass |
| N | Number of particles |
| n | Number of robots |
| The m-th particle | |
| Real measured value | |
| Final estimated position of signal source | |
| Position of the m-th particle | |
| Estimated position of signal source | |
| R | Variance of noise |
| r | Real position of signal source |
| Position of the robot | |
| Random number in [0,1] | |
| Event-triggered time sequence | |
| Control law for the i-th robot | |
| “Hand velocity” of virtual leader | |
| Normalizing weight of the m-th particle | |
| Weight of the m-th particle | |
| “Hand velocity” of the i-th robot | |
| “Hand position” of virtual leader | |
| “Hand position” of the i-th robot |
References
- Lux, R.; Shi, W. Chemotaxis-guided movements in bacteria. Crit. Rev. Oral Biol. Med. 2004, 15, 207–220. [Google Scholar] [CrossRef] [PubMed]
- Lu, Q.; Han, Q.-L.; Zhang, B. Cooperative control of mobile sensor networks for environmental monitoring: An event-triggered finite-time control scheme. IEEE Trans. Cybern. 2017, 47, 4134–4147. [Google Scholar] [CrossRef] [PubMed]
- Lu, Q.; Liu, S.; Xie, X.; Wang, J. Decision-making and finite-time motion control for a group of robots. IEEE Trans. Cybern. 2013, 43, 738–750. [Google Scholar] [PubMed]
- Zhang, X.; Fang, Y.; Sun, N. Visual servoing of mobile robots for posture stabilization: From theory to experiments. Int. J. Robust Nonlinear Control 2015, 25, 1–15. [Google Scholar] [CrossRef]
- Zhang, X.; Fang, Y.; Liu, X. Motion-estimation-based visual servoing of nonholonomic mobile robots. IEEE Trans. Robot. 2011, 27, 1167–1175. [Google Scholar] [CrossRef]
- Wang, Y.-L.; Han, Q.-L. Network-based modeling and dynamic output feedback control for unmanned marine vehicles. Automatica 2018, 91, 43–53. [Google Scholar] [CrossRef]
- Wang, Y.-L.; Han, Q.-L.; Fei, M.; Peng, C. Network-based T-S fuzzy dynamic positioning controller design for unmanned marine vehicles. IEEE Trans. Cybern. 2018. [Google Scholar] [CrossRef]
- Sukhatme, G.S.; Dhariwal, A.; Zhang, B. Design and development of a wireless robotic networked aquatic microbial observing system. Environ. Eng. Sci. 2007, 24, 205–215. [Google Scholar] [CrossRef]
- Kumar, V.; Rus, D.; Singh, S. Robot and sensor networks for first responders. IEEE Pervasive Comput. 2004, 3, 24–33. [Google Scholar] [CrossRef] [Green Version]
- Ferreira, N.L.; Couceiro, M.S.; Araujo, A. Multi-sensor fusion and classification with mobile robots for situation awareness in urban search and rescue using ROS. In Proceedings of the 2013 IEEE International Symposium on Safety, Security, and Rescue Robotics, Linkoping, Sweden, 21–26 October 2013; pp. 1–6. [Google Scholar]
- Azuma, S.I.; Sakar, M.S.; Pappas, G.J. Stochastic source seeking by mobile robots. IEEE Trans. Autom. Control 2012, 57, 2308–2321. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Arnold, D.; Ghods, N. Source seeking with non-holonomic unicycle without position measurement and with tuning of forward velocity. Syst. Control Lett. 2007, 56, 245–252. [Google Scholar] [CrossRef]
- Liu, S.J.; Krstic, M. Stochastic source seeking for nonholonomic unicycle. Automatica 2012, 46, 1443–1453. [Google Scholar] [CrossRef]
- Song, D.; Kim, C.Y.; Yi, J. Simultaneous localization of multiple unknown and transient radio sources using a mobile robot. IEEE Trans. Robot. 2012, 28, 668–680. [Google Scholar] [CrossRef]
- Bachmayer, R.; Leonard, N.E. Vehicle networks for gradient descent in a sampled environment. In Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002; pp. 112–117. [Google Scholar]
- Moore, B.J.; Canudas-De-Wit, C. Source seeking via collaborative measurements by a circular formation of agents. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 1292–1302. [Google Scholar]
- Ogren, P.; Fiorelli, E.; Leonard, N.E. Cooperative control of mobile sensor networks: Adaptive gradient climbing in a distributed environment. IEEE Trans. Autom. Control 2004, 49, 1292–1302. [Google Scholar] [CrossRef]
- Atanasov, N.A.; Ny, J.L.; Pappas, G.J. Distributed algorithms for stochastic source seeking with mobile robot networks. J. Dyn. Syst. Meas. Control 2014, 137, 031004/1–031004/9. [Google Scholar] [CrossRef]
- Li, S.; Kong, R.; Guo, Y. Cooperative distributed source seeking by multiple robots: Algorithms and experiments. IEEE/ASME Trans. Mechatron. 2014, 19, 1810–1820. [Google Scholar] [CrossRef]
- Zhang, X.; Fang, Y.; Li, B.; Wang, J. Visual servoing of nonholonomic mobile robots with uncalibrated camera-to-robot parameters. IEEE Trans. Ind. Electron. 2017, 64, 390–400. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, R.; Fang, Y.; Li, B.; Ma, B. Acceleration-level pseudo-dynamic visual servoing of mobile robots with backstepping and dynamic surface control. IEEE Trans. Syst. Man Cybern. Syst. 2017. [Google Scholar] [CrossRef]
- Oyekan, J.; Gu, D.; Hu, H. Hazardous substance source seeking in a diffusion based noisy environment. In Proceedings of the 2012 International Conference on Mechatronics and Automation (ICMA), Chengdu, China, 5–8 August 2012; pp. 708–713. [Google Scholar]
- Ge, X.; Han, Q.-L.; Yang, F. Event-based set-membership leader-following consensus of networked multi-agent systems subject to limited communication resources and unknown-but-bounded noise. IEEE Trans. Ind. Electron. 2017, 64, 5045–5054. [Google Scholar] [CrossRef]
- Cao, Y.; Yu, W.; Ren, W.; Chen, G. An overview of recent progress in the study of distributed multi-agent coordination. IEEE Trans. Ind. Inform. 2013, 9, 427–438. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhang, H.; Chen, J. Sign-consensus of linear multi-agent systems over signed directed graphs. IEEE Trans. Ind. Electron. 2017, 64, 5075–5083. [Google Scholar] [CrossRef]
- Valcher, M.E.; Zorzan, I. On the consensus of homogeneous multi-agent systems with positivity constraints. IEEE Trans. Autom. Control 2017, 62, 5096–5110. [Google Scholar] [CrossRef]
- Garca-Magario, I.; Gutirrez, C.; Fuentes-Fernndez, R. The INGENIAS development kit: A practical application for crisis-management. In Proceedings of the 10th International Work-Conference on Artificial Neural Networks (IWANN 2009), Salamanca, Spain, 10–12 June 2009; Volume 5517, pp. 537–544. [Google Scholar]
- Garca-Magario, I.; Gutirrez, C. Agent-oriented modeling and development of a system for crisis management. Expert Syst. Appl. 2013, 40, 6580–6592. [Google Scholar] [CrossRef]
- Zou, R.; Kalivarapu, V.; Winer, E.; Oliver, J. Particle swarm optimization-based source seeking. IEEE Trans. Autom. Sci. Eng. 2015, 12, 865–875. [Google Scholar] [CrossRef]
- Li, H.; Liao, X.; Huang, T. Event-triggering sampling based leader-following consensus in second-order multi-agent systems. IEEE Trans. Autom. Control 2015, 60, 1998–2003. [Google Scholar] [CrossRef]
- Xie, D.; Xu, S.; Zhang, B. Consensus for multi-agent systems with distributed adaptive control and an event-triggered communication strategy. IET Control Theory Appl. 2016, 10, 1547–1555. [Google Scholar] [CrossRef]
- Zhu, W.; Jiang, Z.P. Event-based leader-following consensus of multi-agent systems with input time delay. IEEE Trans. Autom. Control 2015, 60, 1362–1367. [Google Scholar] [CrossRef]
- Dimarogonas, D.V.; Johansson, K.H. Event-triggered control for multi-agent systems. In Proceedings of the 48th Decision and Control, 2009 Held Jointly with the 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009; pp. 7131–7136. [Google Scholar]
- Dimarogonas, D.V.; Frazzoli, E.; Johansson, K.H. Distributed event-triggered control for multi-agent systems. IEEE Trans. Autom. Control 2012, 57, 1291–1297. [Google Scholar] [CrossRef]
- Fan, Y.; Feng, G.; Wang, Y. Distributed event-triggered control of multi-agent systems with combinational measurements. Automatica 2013, 49, 671–675. [Google Scholar] [CrossRef]
- Zhang, H.; Feng, G.; Yan, H. Observer-Based Output Feedback Event-Triggered Control for Consensus of Multi-Agent Systems. IEEE Trans. Ind. Electron. 2014, 61, 4885–4894. [Google Scholar] [CrossRef]
- Lawton, J.R.T.; Beard, R.W.; Young, B.J. A decentralized approach to formation maneuvers. IEEE Trans. Robot. Autom. 2003, 19, 933–941. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Sampling time | 0.001 s |
| Noise variance R | 5, 8 |
| Total run time | 20 s for two cases |
| Communication distance | 5 m |
| The number of robots n | 3 |
| The velocity range of robots | [−3 m/s, 3 m/s] |
| Parameters | Value |
|---|---|
| 17 | |
| 22 | |
| 0.1 | |
| 0.001 | |
| N | 10,000 |
| Robots | ||
|---|---|---|
| Robot 1 | 1.81 (0.44) | 0.22 (0.16) |
| Robot 2 | 8.50 (0.48) | 0.25 (0.20) |
| Robot 3 | 7.52 (0.53) | 0.64 (0.71) |
| Robots | ||
|---|---|---|
| Robot 1 | 1.37 (0.54) | 1.07 (0.44) |
| Robot 2 | 8.55 (0.50) | 1.69 (1.08) |
| Robot 3 | 8.07 (0.59) | 0.70 (0.71) |
| (kg) | (m) | (kg ) | b (m) | l (m) | (kg ) |
|---|---|---|---|---|---|
| 2.92 | 0.126 | 0.05 | 0.03 | 0.252 | 0.002 |
| Robots | ||
|---|---|---|
| Robot 1 | 6.21 (0.34) | 0.30 (0.08) |
| Robot 2 | 12.56 (1.05) | 0.46 (0.17) |
| Robot 3 | 11.64 (1.23) | 0.27 (0.07) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, L.; Lu, Q.; Yin, K.; Zhang, B. Signal Source Localization of Multiple Robots Using an Event-Triggered Communication Scheme. Appl. Sci. 2018, 8, 977. https://doi.org/10.3390/app8060977
Pan L, Lu Q, Yin K, Zhang B. Signal Source Localization of Multiple Robots Using an Event-Triggered Communication Scheme. Applied Sciences. 2018; 8(6):977. https://doi.org/10.3390/app8060977
Chicago/Turabian StylePan, Ligang, Qiang Lu, Ke Yin, and Botao Zhang. 2018. "Signal Source Localization of Multiple Robots Using an Event-Triggered Communication Scheme" Applied Sciences 8, no. 6: 977. https://doi.org/10.3390/app8060977
APA StylePan, L., Lu, Q., Yin, K., & Zhang, B. (2018). Signal Source Localization of Multiple Robots Using an Event-Triggered Communication Scheme. Applied Sciences, 8(6), 977. https://doi.org/10.3390/app8060977