1. Introduction
China’s high-speed trains (HST) has been developed rapidly in recent years. As an important system of a high-speed railway (HSR), the traction network directly influences the reliable power supply of trains. Focusing on the traction network, the short-circuit influence and the voltage loss are two important parts of the power-supply capability. In the actual operation of an HSR, the short-circuit catenary fault is easily caused by an accidental collision of a bird with the conductor, an internal fault of the train, etc. The voltage loss of the traction network is heavily influenced by the power supply mode of the traction network. Therefore, it is necessary to effectively assess the power supply capability of the traction network on the basis of establishing an accurate traction network mathematical model. The power supply capability is reflected by the traction network integrated impedance. Performing complete and accurate spatial magnetic field description is a premise for obtaining exact traction network integrated impedance.
Aiming at the traction network, many scholars have tried to establish its mathematical model by applying multi-conductor transmission-line (MTL) theory. Existing models mainly include a unified chain circuit model applicable to different power supply modes [
1,
2], harmonic models [
3,
4], MTL models of various traction networks, e.g., an auto-transformer (AT) supply system and a novel cable supply system [
5,
6,
7]. Some application studies have been also done. In [
5], the magnetic fields and harmonics in the surroundings of the AT traction network were analyzed. In [
8,
9], the electromagnetic compatibility of the traction network was assessed. In [
10], a strategy for suppressing low-frequency oscillation has been proposed and its effectiveness was proved by a model simulating a HST-traction network electrical coupling system. Aimed at the AT system with protection wire, a merge process of protection wire and rail was performed and the rail potential was analyzed with a decoupling method in [
11]. Moreover, many researchers have studied the electromagnetic interference caused by a common lightning strike [
12], pantograph detachment arc [
13], etc. Meanwhile, with the help of theoretical analyses, software simulations or experimental measurements, models of the arc, HST, etc., are established and introduced into various traction network mathematical models to analyse accurately interference sources such as arcing phenomenon, vehicle body over-voltages, pantograph over-voltages [
14,
15].
Focusing on railway lines on special roads such as stations, tunnels and viaducts, some electromagnetic transient models were also studied [
16,
17,
18,
19,
20]. In [
18], the traction network system of the viaduct path is equivalent to the lumped parameter model and the viaduct’s electrical coupling is considered in modelling. In [
19,
20], the influences of the arc-burning phenomenon of insulated rail joints were investigated by state-space model analyses and chain modelling simulations, respectively. Combined with MTL theory, the inductive and capacitive couplings of conductors in the station path are reflected in the chain model of the traction network. Nevertheless, in the aspect of spatial magnetic field description, the application study of traction network models has been insufficient [
21].
According to basic electromagnetic theory, obtaining complete and accurate current distribution is the premise for realizing complete and accurate spatial magnetic field description. For the AT system that is widely applied to HSR, some scholars have investigated the current distributions by equaling the AT system to a simple topology [
22,
23,
24]. Compared with studies that regard the AT system as an ideal system [
22,
23], In [
24], a derivation method considering the fact that rail current is not null at the road of a long loop circuit was proposed. Nevertheless, because many real conductors are merged when the AT system is equaled to a simple topology, only the current distribution coefficient of a merged conductor can be obtained.
In order to study the spatial magnetic field description of the AT system, obtaining the exact current distribution coefficient of each conductor is necessary. Corresponding studies are very few so far and involve the traction network mathematical model based on MTL theory [
21].
In the existing traction network mathematical model based on MTL theory, the earth is generally taken as reference conductor. However, this causes some limitations in the spatial magnetic field description. Taking the simple direct power supply system as an example, the limitations are illustrated as follows.
As shown in
Figure 1, because the earth is assumed as the reference conductor, each fundamental spatial magnetic field unit (namely loop circuit) is structured by the earth and the other traction network conductor at first. For the earth, this structures Loop circuit 1, Loop circuit 2, Loop circuit 3, Loop circuit 4 with a carrier cable, contact cable, rail and return cable, respectively. For each loop circuit, only after assuming that the current of the reference conductor has the same amplitude and the opposite direction as the other conductor, can the self and mutual flux linkage be calculated. That is, the rail current is composed of four parts, and the four parts respectively have the same amplitude and the opposite direction as the currents of the carrier cable, contact cable, rail and return cable.
To begin with, the traction substation shown in
Figure 1 can be seen as an excitation source of the traction network. The carrier cable and contact cable are used for transferring currents from the excitation source to the HST, and the rail, return cable and the earth are used for returning currents from the HST to the excitation source. Therefore, the carrier cable and contact cable are transmission conductors, while the rail, return cable and earth are return conductors. Because the real traction network loop circuit is constituted by the transmission conductor and the return conductor, Loop circuit 3 and Loop circuit 4 are assumed to be loop circuits. Hence, the spatial magnetic field description is not starting from the reality of traction network in the conventional method.
In addition, since the currents of Loop circuits 3–4 are not generated by the excitation source, the deduced interlinkage flux of Loop circuits 3–4 and Loop circuits 1–2 is different from the inter linkage flux of the real loop circuits. This leads to the imprecise description of the spatial magnetic field.
Furthermore, it can be demonstrated from
Figure 1 that the currents of Loop circuits 1–4 are namely the currents of the carrier cable, contact cable, catenary, rail and return cable. However, the currents of Loop circuits 1–4 are only the partial currents of the carrier cable, contact cable, catenary, rail and return cable in actuality. Taking the carrier cable current an example, this includes not only the current of Loop circuit 1, but also the currents of the loop circuit that is constituted by carrier cable and rail and the loop circuit that is constituted by the carrier cable and return cable. So, the conventional approach lacks the complete description.
Finally, according to the conventional approach, the sum of currents of Loop circuits 3–4 is assumed to be equal to that of Loop circuits 1–2 in
Figure 1. Obviously, the earth’s own current is ignored in this relation. The actual relation should be that the sum of the currents of Loop circuits 3-4 and the self-current of the earth is equal to that of Loop circuits 1–2. Neglecting the earth self-current also illustrates the incompleteness of the conventional approach.
For the reason that the real loop circuit is composed of the transmission conductor and the return conductor, the total number of real loop circuits in a simple direct power supply system is six, including Loop circuit 1′, Loop circuit 2′… Loop circuit 6′ of
Figure 1. If all the real loop circuits are considered in the calculation of traction network current distribution, it is possible to gain a complete and accurate spatial magnetic field description. In addition, as for the AT system, two types of return conductors exist in it. The electrical structure of the AT system is relatively more complex than that of a simple direct power supply system. Considering that there is also no related research that considers the detailed electrical structure of the AT system so far, it is necessary to have a complete and accurate spatial magnetic field description of AT system, after considering all the real traction network loop circuits and the power supply characteristics of the AT system.
In this paper, a spatial magnetic field description method of the AT system is presented. It not only adopts the traction network mathematical model based on MTL theory, but also combines the actuality of the detailed electrical structure of AT system. Starting from fundamental considerations in theory, the traditional assumption that the earth is the reference conductor of all the conductors is canceled and all the real traction network loop circuits are considered as fundamental spatial magnetic field units. Considering that two types of return conductors exist and they have different voltages to the transmission conductor in the AT system, a fundamental relation formula of return conductor current and transmission conductor current is introduced. On this basis, an iterative calculation approach is adopted to realize the exact spatial magnetic field unit.
The rest of this paper is organized as follows.
Section 2 shows the analysis of an AT double-track system based on MTL theory. Then, the common situation that the load is running in the up traction network or the down traction network is taken as an example to illustrate the description processes of the proposed description method in
Section 3. In
Section 4, the effectiveness and accuracy of the proposed method are proved by real-life experimental verification.
Section 5 draws some conclusions.
2. Analysis of Auto-Transformer (AT) Double Track System Based on Multi-Conductor Transmission-Line (MTL) Theory
The cross section of standard 2 × 25-kV AT railway system line is depicted in
Figure 2, where the contact wire, carrier cable, two rails, protective wire, integrated earth wire and positive feeder in up traction network (down traction network) are marked as JW1(JW2), CW1(CW2), R1(R3), R2(R4), PW1 (PW2), EW1(EW2) and FW1(FW2), respectively; and the earth is marked as E. Because each loop circuit is constituted by a transmission conductor and a return conductor while all the other conductors and the earth are return conductors, the standard railway system line in
Figure 2 has 40 loop circuits. The numbers of all the loop circuits are shown in
Table 1.
In the AT system, return conductors can be divided into magnetic field conversion return conductors and electric field return conductors. FW1, FW2 in
Figure 2 belong to the former because they constitute loop circuits via the magnetic field conversion of the auto-transformer substation (ATS). R1, R2, PW1, EW1, R3, R4, PW2, EW2, E belong to the latter because they constitute loop circuits by connecting with each other through conductors/leakage conductance, or contacting the rail with the HST’s wheel.
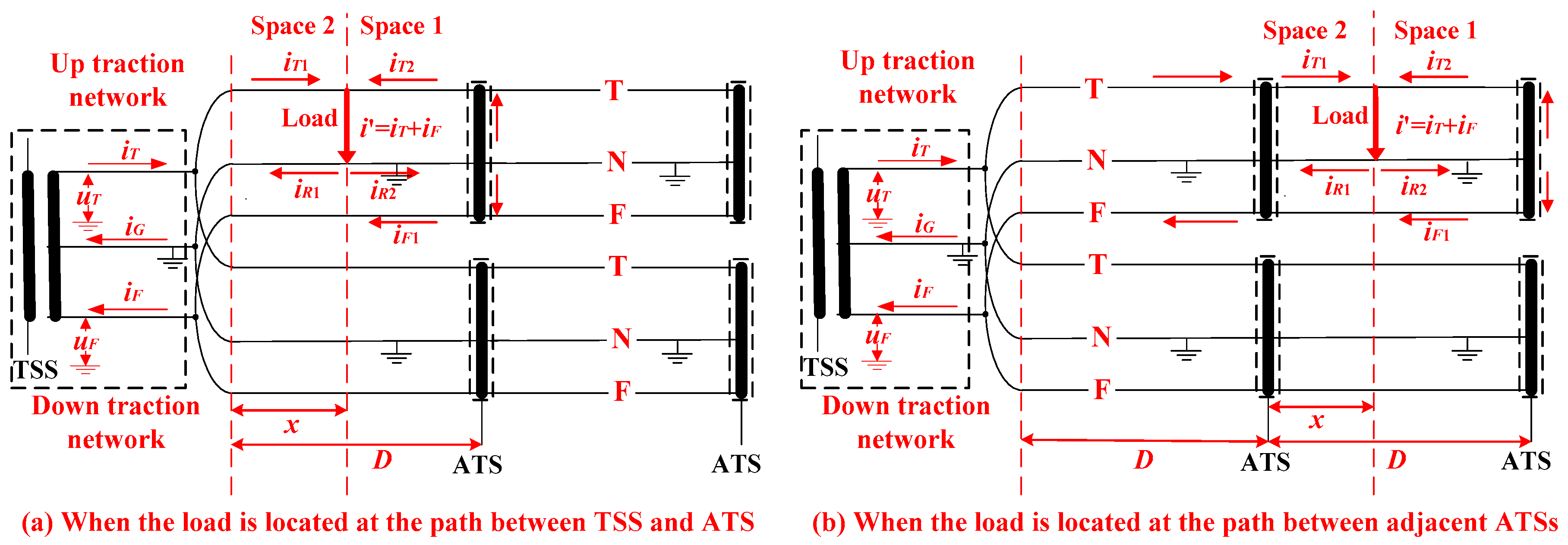
The AT system is composed of two types of AT segments. One is the path between the traction substation (TSS) and the ATS. The other is the path between the adjacent ATSs. For the two types of AT segments, the path at which load (expressed as HST here) is located is called the segment loop circuit while the path at which the load is not located is called the long loop circuit. That is, when the load is located at the path between the TSS and the ATS, the path between the TSS and the ATS is the segment loop circuit while the other path is the long loop circuit. When the load is located at the path between the ATSs, the path between the TSS and the ATS is the long loop circuit while the other path is the segment loop circuit.
Figure 3 depicts the currents of the AT system when assuming that the transmission conductors, electric field return conductors and magnetic field conversion return conductor are marked as T, N and F. In
Figure 3,
iT1 and
iT2 are currents of T at the left and right sides of the load, respectively;
iR1 and
iR2 are currents of N at the left side and right side of load;
iF1 is current of F at path of segment loop circuit;
i′ is load current;
iT,
iF and
iG are respectively total currents of T, F and N in the up and down traction network;
uT is potential to earth of positive bus-bar in the TSS;
uF is potential to earth of the negative bus-bar in the TSS. Both the distance between the TSS and ATS and the distance between adjacent ATSs are assumed to be
D. When the load is located at the path between the TSS and ATS,
x is the distance between the load and TSS at the left side; when the load is located at the path between adjacent ATSs,
x is the distance between the load and ATS at the left side.
For the complete and accurate spatial magnetic field description of the AT system, obtaining complete and exact current distribution is the premise, and solving the precise traction network integrated impedance is an important aim. Thus, the deductions of current distribution and integrated impedance (marked as Z0 here) implement the process of description. As for Z0, this is the integrated impedance of all the traction network loop circuits in parallel from the location of the traction substation to the location of the load or short-circuit point.
As the load is located at the path between the TSS and ATS in
Figure 3a, unit length
Z0 is obtained by:
As the load is located at the path between adjacent ATSs in
Figure 3b, unit length
Z0 is obtained by:
In addition, Equation (3) shows the relation among
uT,
uF,
i′,
iT,
iG,
iF [
22].
In the segment loop circuit, return currents are borne by F and N. The relation among
iR1,
iR2 and
iF1 is often expressed as Equation (4) according to [
22].
According to Equation (4), when the load is running in the segment loop circuit, the distribution proportions of return currents in N and F will constantly change. At the beginning position of the segment loop circuit (i.e.,
x = 0 in Equation (4)), the return current is fully borne by N. At the terminal position of the segment loop circuit (i.e.,
x =
D in Equation (4)), the return current is fully borne by F. The current distribution and the segment loop circuit impedance are equal to that of the long loop circuit. So, to get the integrated impedance and current distribution of the whole AT double-track system, it is only necessary to obtain the deduction for the segment loop circuit. In addition, in terms of the Space 1 and the Space 2 seen in
Figure 3, the deductions are separately made at first. Since the relation of
iR1,
iF1 and the relation of
iR2,
iF1 are different, the deduction processes of Space 1 and Space 2 are illustrated, as follows, separately.
3. Deduction Scheme Aimed at the Condition that the Load Exists in Up Traction Network or Down Traction Network
Because the parameters and the structure of the up and down traction networks are the same, the solution processes and results of current distribution and traction network integrated impedance are entirely identical. Thus, only the situation that the load exists in the up traction network is considered.
When the load is in the up traction network, the loop circuits of 1–20 are considered, as listed in
Table 1. According to the relation between unit-length voltage drop and unit-length flux linkage of each loop circuit, when the source is a sinusoidal excitation, this can be obtained below.
where
ɷ is angular velocity, Δ
ui is voltage drop of loop circuit
i,
ij is current of loop circuit
j,
li-j (
i =
j) is self-inductance of each loop circuit, and
li-j (
i ≠
j) is mutual inductance between loop circuit
i and loop circuit
j (
i,
j = 1, 2 … 20).
3.1. Deduction for Space 1
The
iR2 = 2
iF1 in Equation (4), i.e., the total currents of N are two times that of F. According to
Table 1, considering that the total current of R1, R2, R3, R4, PW1, EW1, PW2, EW2, E is
iR2 and the current of FW1 is
iF1, it is reasonable that
=
iR2 and
i10 +
i20 =
iF1. In the synthesis of above relations, Equation (6) can be gained.
Meanwhile, owing to the fact that the unit-length voltage drop between JW1 and FW1 is equal to the unit-length voltage drop between CW1 and FW1, this can be formulated as:
Then, by introducing Equations (6) and (7), the subtraction of Δu10, Δu20 is performed and the current ratio of N and F is introduced in Equation (5). Equation (5) is transformed into Equation (8), where ai = l10-i − l20-i (i = 1, 2, ⋯, 20) in the tenth row of inductance matrix.
Assuming that the total current of transmission conductors or return conductors is i0 and the current distribution coefficient of each loop circuit of Space 1 is ki (i=1, 2 ... 20), ii = kii0 is gained. Δu1, Δu2 ... Δu9, Δu11, Δu12 ... Δu19 are the unit-length potential difference between T and N and they can be seen as equal to each other. In view of this, Δu1 = … = Δu9 = Δu11 = … = Δu19 = c1 (c1 is arbitrary constant) is set. Then, focusing on Equation (8), by performing an inverse matrix transformation and introducing ii = kii0 and Δu1 = … = Δu9 = Δu11 = … = Δu19 = c1, Equation (8) is transformed into Equation (9).
For Equation (9), after calculating the coefficients of the inductance matrix and eliminating
i0 in the first column, the values of
k1,
k2 …
k20, are deduced. Subsequently, by introducing
ii =
kii0 into Equation (5), it can be found that,
By substituting the deduced values of k1, k2 ... k20 into Equation (10), Δu1, Δu2 ... Δu20 are acquired. However, because the i0 of Equation (10) is still unknown, the deduced Δu1, Δu2 ... Δu20 are not values, but are mathematical expressions of i0. Meanwhile, due to Δu1= ... = Δu9 = Δu11 = … = Δu19 and Δu10 = Δu20, it can be understandable that the obtained expressions of Δu1, Δu2 ... Δu9, Δu11 ... Δu19 are equal while the obtained expressions of Δu10, Δu20 are equal. On this basis, we can assume that Δu1 = … = Δu9 = Δu11 = … = Δu19 = f1(i0) and Δu10 = Δu20 = g1(i0). Unit-length electric field return impedance of Space 1 (marked as Z1) is calculated by Z1 = f1(i0)/i0. Unit-length magnetic field conversion return impedance of Space 1 (marked as Z2) is calculated by Z2 = g1(i0)/i0.
The traction network loop circuits can be divided into the overhead loop circuit and earth return loop circuit. The former is composed only of conductors while the latter is composed of the conductor and the earth. For the two types of loop circuits, the calculation formulas of the inductance matrix coefficients in Equation (5) are different. As for the overhead loop circuit, the inductance coefficients are calculated by using the fundamental formulas of loop circuit inductance [
25,
26]. As for the earth return loop circuit, considering that the earth is a part of the loop circuit, the inductance coefficients are calculated with the Carson formula [
27,
28].
3.2. Deduction for Space 2
The in Equation (4) is introduced.
At first, combining
and
Table 1,
=
iR1,
i10 +
i20 =
iF1 and Equation (11) are given.
Meanwhile, being similar to the unit-length voltage drop relationship in Space 1,
By introducing Equations (11) and (12), Equation (5) is changed into Equation (13).
where
ai =
l10-i −
l20-i (
i = 1, 2 ... 20) in the tenth row of inductance matrix.
As for Space 2, given that total current of transmission conductors or return conductors is i0′ and current distribution coefficient of each loop circuit is ki′ (i = 1, 2 ... 20), it is obvious that ii = ki′·i0′ (i = 1, 2 ... 20). Then, being similar to Space 1, by performing the inverse matrix transformation, introducing ii = ki′·i0′ (i = 1, 2 ... 20) and setting Δu1, Δu2 ... Δu9, Δu11 ... Δu19 to an arbitrary equal constant of c2 in Equation (13), Equation (14) is then obtained.
In Equation (14), after calculating the self and mutual inductance of the loop circuit matrix and eliminating i0′ in the first column, the values of k1′, k2′ ... k20′ are obtained.
Subsequently, by substituting the obtained values of k1′, k2′ ... k20′ into Equation (15), Δu1, Δu2 ... Δu20 are deduced. Similarly, with Space 1, for the reason that the deduced Δu1, Δu2 ... Δu20 are mathematical expressions of i0′ and Δu1 = … = Δu9 = Δu11 = … = Δu19 while Δu10 = Δu20, we assume that Δu1= … = Δu9 = Δu11 = … = Δu19 = f2(i0′) and Δu10 = Δu20 = g2(i0′). The unit-length electric field return impedance of Space 2 (marked as Z1′) is calculated by Z1′ = f2(i0′)/i0′. The unit-length magnetic field conversion return impedance of Space 2 (marked as Z2′) is calculated by Z2′ = g2(i0′)/i0′.
However, the result of in Equation (4) is valid only when the spatial position between T and N is symmetrical with the spatial position between N and F and the self-impedance of T is equal to the self-impedance of F. The aforementioned deduced values of k1′, k2′ ... k20′, Z1′ and Z2′ are inaccurate and they can only be regarded as initial results.
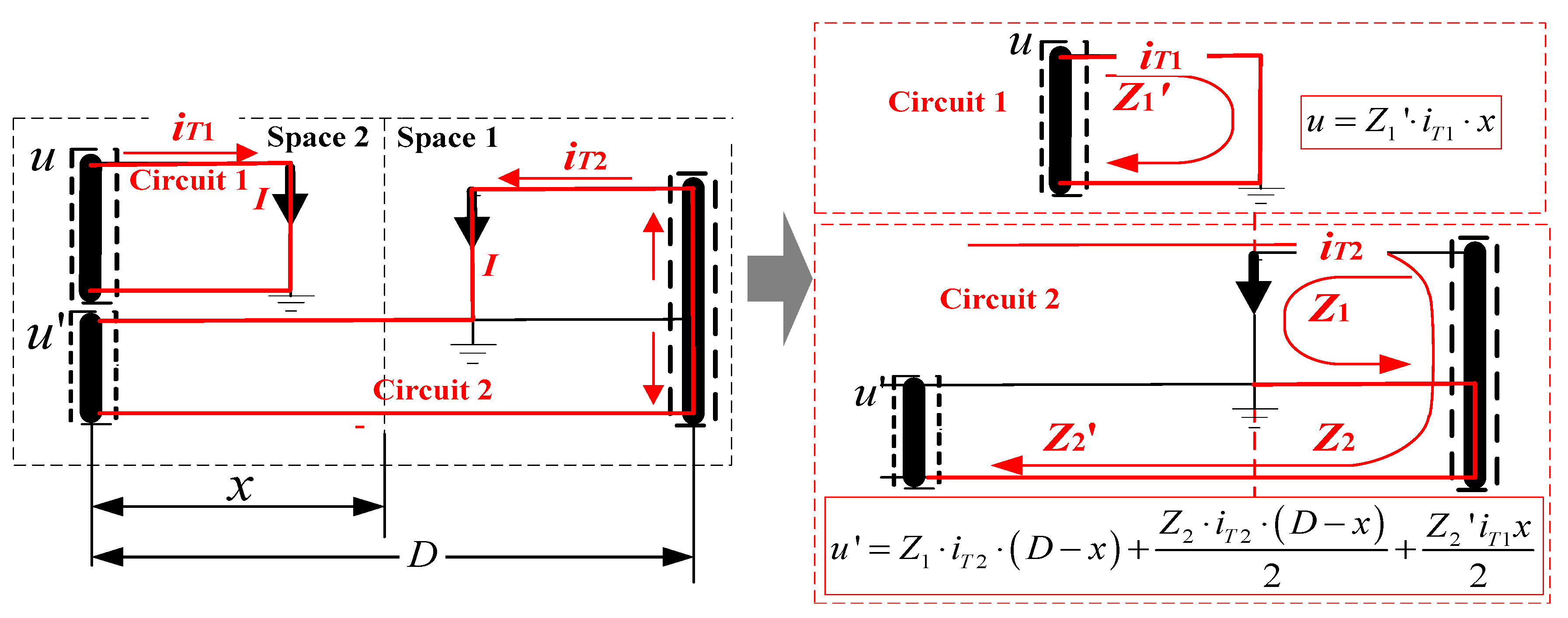
According to the transformer radio transformer of AT in Space 2, the voltage drop between T and N, i.e.,
u in
Figure 4 should be equal to the voltage drop between N and F, i.e.,
u′ in
Figure 4.
For the
in
Figure 4, the values of
Z1 and
Z2 have been obtained after introducing the
iR2 = 2
iF1 of Equation (4) into the inductance matrix of Space 1; the values of
Z1′ and
Z2′ have been obtained after introducing the
of Equation (4) into the inductance matrix of Space 2. According to Equation (4) and the circuit of the AT system, the relation of
iT1,
iT2,
iF1 satisfies
By introducing Equation (17) into
, determining
x =
x0 (according to the location of load) and setting
iF1 as an arbitrary constant of
c, it can be found that
In Equation (18),
u and
u′ are always unequal for the reason that the granted results of
are valid only as an approximation. In order to obtain exact results, an iterative calculation method aimed at satisfying the constraint condition of Equation (16) is proposed, as demonstrated in
Figure 5.
In the beginning, the iR1/iF1 is adjusted to deduce new values of k1′, k2′ ... k20′, Z1′ and Z2′. On this basis, new u and u′ are obtained after introducing new iT1/iT2 and new values of Z1′ and Z2′ into . If u = u′ is still not satisfied, iR1/iF1 continues to be adjusted and corresponding calculation is repeated again. Only when u nearly approximates to u' are the deduced values of k1′, k2′ ... k20′, Z1′ and Z2′ considered as final and accurate results for Space 2.
When the final and accurate values of
Z1′ and
Z2′ are determined, the impedance of circuit 1 in
Figure 4 (marked as
Za) and the impedance of circuit 2 in
Figure 4 (marked as
Zb) are, respectively, calculated by Equations (19) and (20).
The impedance of the segment loop circuit (marked as ZA) is the parallel impedance of
Za and
Zb, namely,
When the load is located at the path between the TSS and ATS, the unit-length traction network impedance (marked as Z) is obtained by utilizing Equation (22).
When the load is located at the path between adjacent ATSs, the traction network impedance is composed of
ZA and impedance of the long loop circuit (marked as
ZB). As mentioned in
Section 2, when
x =
D, the return current is fully borne by F. The current distribution and impedance of the segment loop circuit are equal to that of the long loop circuit. Therefore, after substituting
x =
D for
x =
x0 in Equation (21),
ZB is deduced as
So, when the load is located at the path between adjacent ATSs, Z is obtained by utilizing Equation (24).
4. Experimental Verification
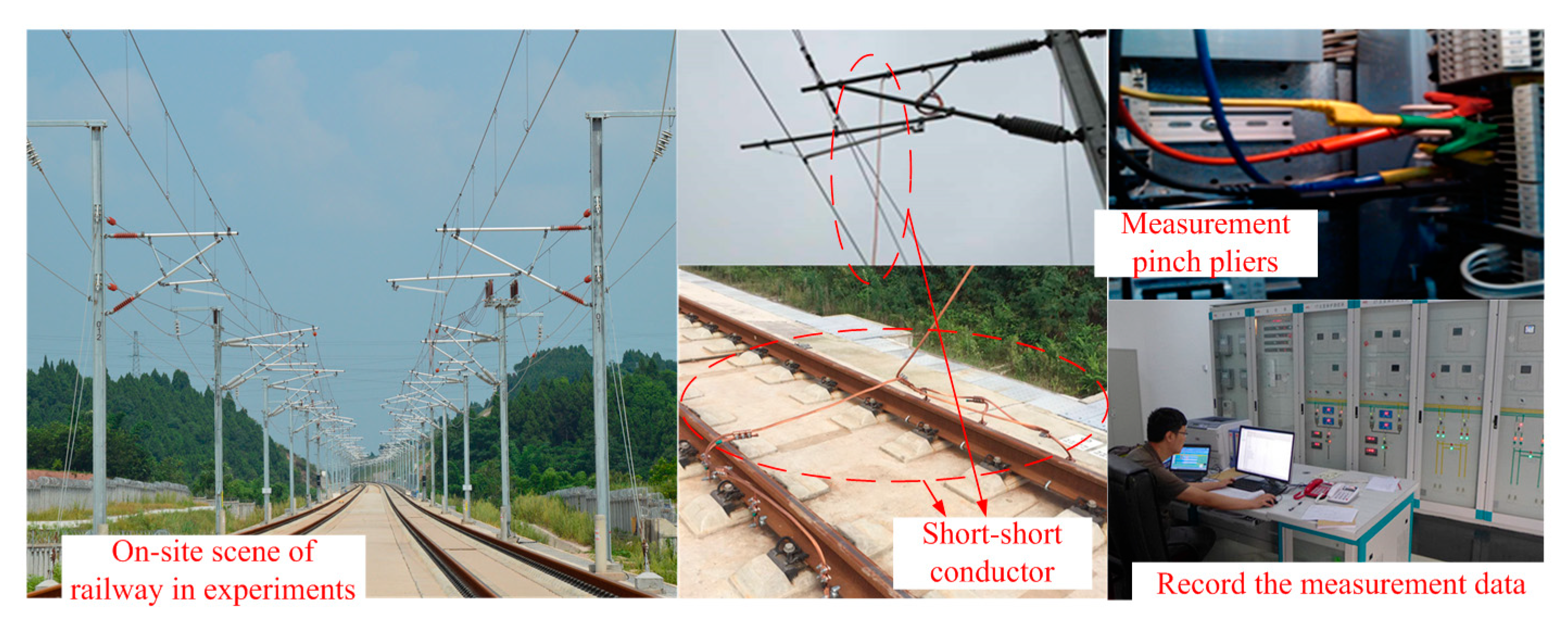
To prove the effectiveness of proposed method effectively and accurately, two short-circuit experiments at different Chinese HSR lines were performed. The first experiment was carried out in the feeding arm of Jiangyou substation on the Chengdu–Chongqing HSR line on 11 October 2015. The second short-circuit experiment was carried out in the feeding arm of Qinglinkou substation on the Xian–Chengdu HSR line on 12 July 2017. The cross section and parameters of traction network conductors in the experiments are shown in
Figure 2 and
Table 2. The numbers of all the loop circuits in the experiments are listed in
Table 1. In the two short-circuit experiments, flexible copper stranded conductor was used to short-circuit the rail and the catenary.
Figure 6 and
Figure 7 depict the circuit diagram and scene diagram of two short-circuit experiments. According to
Figure 6, whether for the first short-circuit experiment or the second short-circuit experiment, switches A1, A2, A4, A6, A13, A14, A17 and A18 are closed and the other switches are opened to simulate the standard 2 × 25-kV AT double track power supply mode. The effective values of all the measured currents are shown in
Table 3. In addition, the low-voltage side bus voltages of the traction substation and the total currents of the transmission conductors are, respectively, collected at the secondary side of the traction transformer and current transformer in the position of switch A1. According to the collection results, the measured integrated impedance can be obtained.
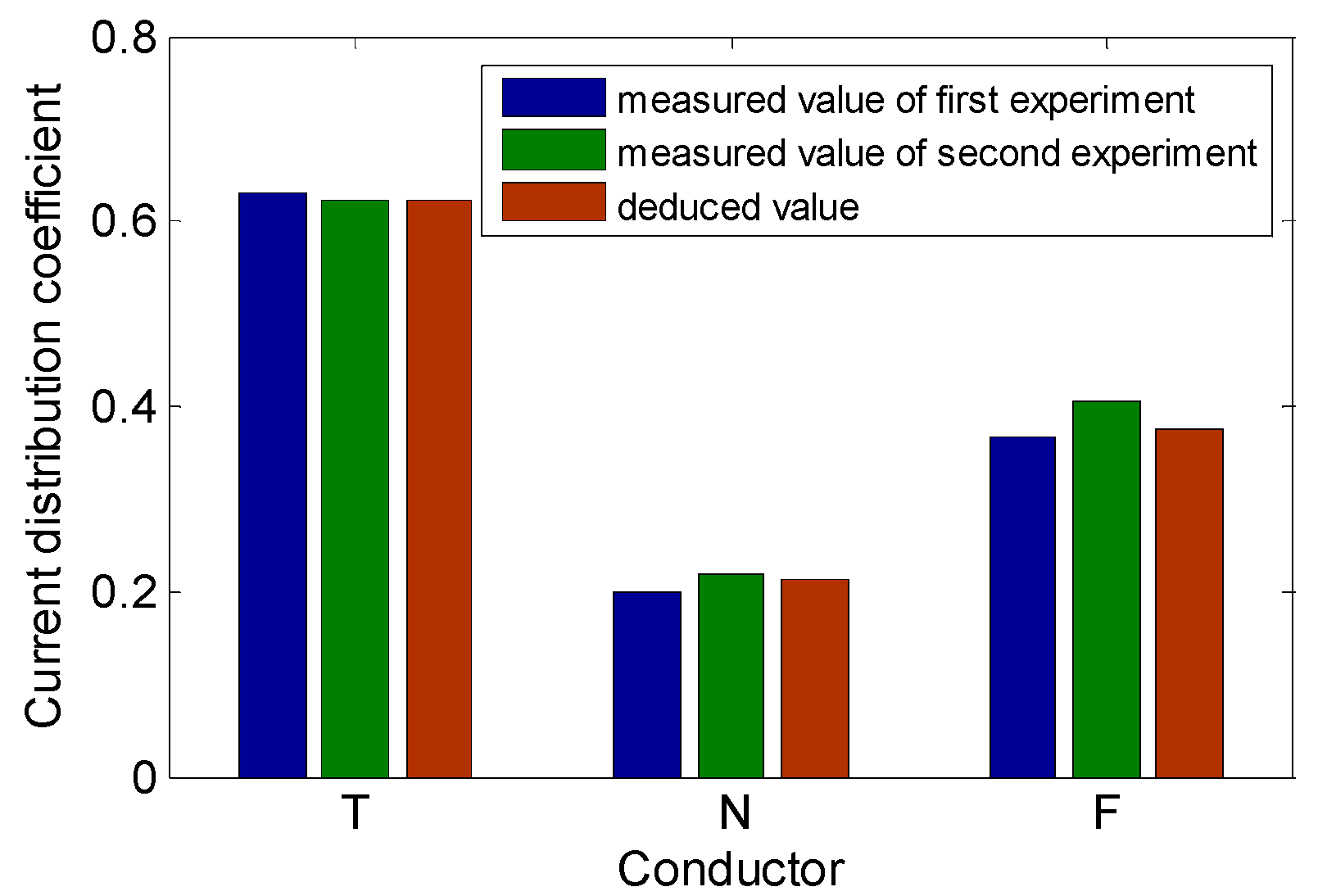
Based on the proposed deduction method, the current distribution coefficients of conductors in the short-circuit experiments are calculated in
Table 4, after the initial current distribution is continuously adjusted to satisfy the constraint condition of real circuit voltages as much as possible. Compared with existing analysis results of current distribution in the traction network ([
21,
29]), the deduced results in
Table 4 are reasonable. Furthermore, according to
Table 4, the deduced current distribution coefficients of T, N and F are 0.6235, 0.2138 and 0.3765, respectively. According to
Table 3, the measured current distribution coefficients of T, N and F in the first short-circuit experiment are 0.6304 (
IT/
I), 0.1985 (
IG/
I) and 0.3673(
IF/
I), respectively, and the measured current distribution coefficients of T, N and F in the second short-circuit experiment are 0.6233 (
IT/
I), 0.2180 (
IG/
I) and 0.4055(
IF/
I), respectively. The comparison between the measured current distribution coefficients and the deduced current distribution coefficients is demonstrated in
Figure 8. Obviously, the deduced results are very close to the measured results.
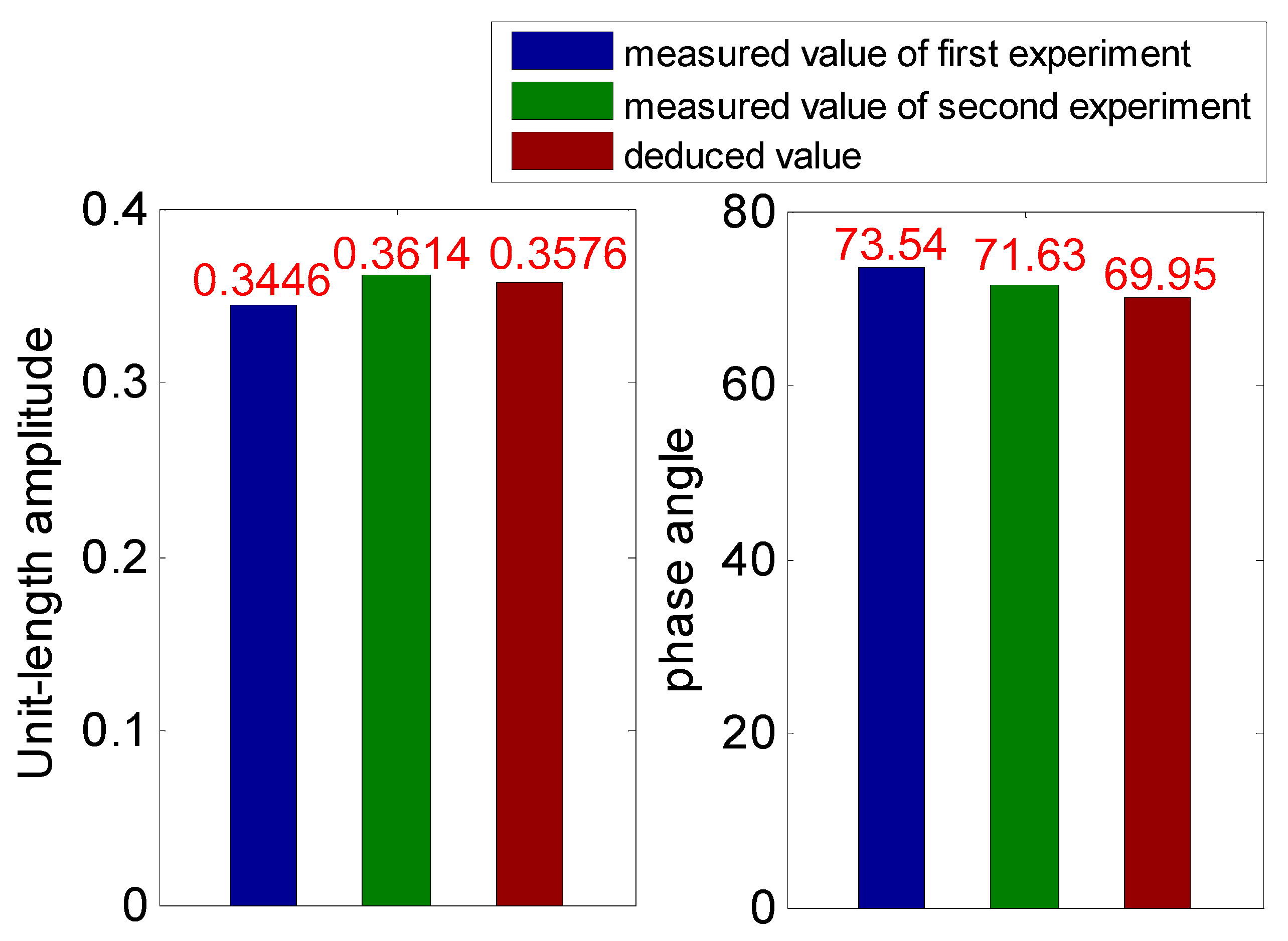
Furthermore, according to measurement records, the unit-length amplitude and phase angle of integrated impedance were 0.3446 Ω/km and 73.54° in the first short-circuit experiment; and the unit-length amplitude and phase angle of integrated impedance were 0.3614 Ω/km and 71.63° in the second short-circuit experiment. Relatively, the derived unit-length amplitude and phase angle of integrated impedance were 0.3576 Ω/km and 69.95°, considering the iterative solution of approaching the constraint condition.
Figure 9 depicts the comparison of the above results by using histograms. It can be demonstrated that both the measurement results of the two short-circuit experiments are almost identical to the derived results.
5. Conclusions
This paper is concerned with the AT system in HSR and proposes a spatial magnetic field description method, combined with the ideas of a multi-conductor loop circuit and iteration. This method cannot only directly reflect the complete current distribution of a traction network, but also deduce the exact traction network integrated impedance.
First, due to the limitations of the existing approach, the hypothesis that the earth is the reference conductor of a structuring loop circuit matrix is cancelled. To satisfy the condition of complete and accurate spatial magnetic field description, all the real traction network loop circuits and their self and mutual inductance influences are considered in order to list the loop circuit matrix of the AT system.
Next, considering the actual electrical structure of the AT system, different description processes are divided, respectively, for the right side of the load (Space 1) and the left side of the load (Space 2). Considering that the two types of return conductors have different potential differences with the transmission conductor in the AT system, certain current ratios deduced in existing studies are introduced. For Space 1, after directly introducing the current ratio into the loop circuit matrix and performing some matrix transformations on this basis, the complete current distribution and the impedance of the traction network can be obtained. For Space 2, after directly introducing the current ratio into the loop circuit matrix and performing some matrix transformations on this basis, the deduced results are actually inaccurate, for the reason that the introduced current ratio of Space 2 is approximate. Therefore, an iterative scheme is adopted for the deduction of Space 2. According to the transformer ratio of the AT substation, a constraint condition of circuit voltages is determined. By approximately searching and adjusting the current ratio to satisfy the constraint condition of circuit voltages, accurate current distribution and traction network integrated impedance are finally obtained.
Finally, experimental verification was undertaken. The results demonstrate that the presented method has the capability to depict the exact current distribution and traction network integrated impedance of an AT system.
Further investigations on the improvement of the spatial magnetic field description method of an AT system are necessary. For example, it is feasible to obtain the exact rail potential distribution if the leakage conductance between rail and earth is considered in the establishment of the loop circuit matrix. Also, some engineering applications of the description method, such as testing software development, can be further studied.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}