1. Introduction
In recent years, the coordination control scheme of multiple robots has drawn considerable attention in various fields [
1]. Multiple robots can be applied in many dangerous places to free the human being, including the earthquake rescue, the warehouse translations, and some tasks at nuclear power plants. A multi-robot system can be treated as a coupling network of some robots, where the robots communicate with each other to achieve some complex duties [
2,
3]. Various investigations have been explored to achieve the coordination control of multiple robots. These investigations can be roughly classified into leader–follower formations [
4,
5,
6,
7,
8], virtual structure mechanisms [
9,
10,
11,
12], graph-based approaches [
13,
14], and behavior-based methods [
15,
16].
The leader–follower formations are attractive in the coordination control of multi-robot systems. Partly, such formations benefit multiple robots because the formations can have guaranteed formation stability via control design [
17]. The basic control idea of the leader–follower mechanism is that multiple robots are divided into several leader–follower pairs. In the leader–follower mechanism, all follower robots share the same leader. In each pair, the leader robot moves along the predefined trajectory, while the follower robots track the leader with desired relative distance and angle. In the leader–follower system of multiple robots, only partial followers can obtain the state of the leader, and the interaction between follower robots and leader robot is local [
18]. Many control methods have been applied in the leader–follower multi-robot systems, such as sliding mode control (SMC) based on nonlinear disturbance observer [
18], SMC [
19], second-order SMC [
20], adaptive control [
21,
22], predictive control [
23], integral terminal SMC [
24], and terminal SMC [
25].
In actuality, it is unavoidable for any robots to be affected by uncertainties such as external disturbances, unmodeled dynamics, and parameter perturbations [
26]. The dynamics of multi-robot systems becomes uncertain, due to these uncertainties [
27]. These uncertainties can be categorized into unmatched uncertainties and matched uncertainties [
28]. However, the SMC method, as a strong robust tool, has invariant nature to the matched uncertainties when an SMC system enters into the sliding mode. Unfortunately, the effects of unmatched uncertainties cannot be suppressed by the SMC methods [
29]. The unmatched uncertainties can challenge the performance of the SMC system seriously. The characteristic of terminal SMC (T-SMC) has its nonlinear sliding surface. Compared with those traditional SMC approaches, the T-SMC method has faster convergence speed and higher accuracy. However, the T-SMC method has the singular problem due to its fractional function. Therefore, the derivative and integral T-SMC (DIT-SMC) method is proposed [
30]. The DIT-SMC method is of merit. Due to the existence of the integral term, the sliding mode of the DIT-SMC method starts on the derivative and integral terminal sliding mode surface. Moreover, the DIT-SMC method can guarantee the exact estimation of finite error convergence time, and resolve the singular problem of the T-SMC. On the other hand, the derivative term of the DIT-SMC method can reduce the nonlinear effects to the stability of a DIT-SMC system.
In the previous works [
21,
22,
23,
24,
25,
26,
27,
28,
29,
30], the assumption that the uncertainties have a known boundary is assumed. Concerning the formation maneuvers of multi-robot systems, the assumption is not mild. In fact, the boundary of uncertainties in multiple robots is hard to be known exactly in advance. In case of the lack of the important information, several serious problems may be raised in reality, for example, the decrease of the formation robustness, the deterioration of the formation performance, as far as the deficiency of the formation stability. In order to resolve the problem of the uncertainties, the nonlinear disturbance observer is adopted. The unknown unmatched uncertainties are estimated by the nonlinear disturbance observer. The technique of nonlinear disturbance observer (NDOB) can handle the unmatched uncertainties problem and improve the robustness of the formation control system.
This paper deals with the formation problem of multiple robots with uncertainties. The control scheme combining derivative and integral terminal sliding mode and nonlinear disturbance observer is investigated. The derivative and integral terminal sliding mode method allows the system start on the sliding surface. The reaching time of sliding surface is eliminated. The matched uncertainties in formation system are suppressed by the DIT-SMC method. Under the mild assumption that the uncertainties have an unknown boundary, the NDOB is designed to estimate the unmatched uncertainties in the formation system. The estimate errors will converge to zero in the limited time by setting the parameter of NDOB. In the sense of Lyapunov, the system stability is guaranteed in spite of uncertainties. Finally, some numerical simulations are displayed to illustrate the feasibility and effectiveness.
3. Control Design
Due to the inherent characteristics of centralization, the scheme mainly depends on the leader robots and exists as the “single point of failure” problem. In order to develop derivative and integral terminal sliding mode approach to coordinate the leader robot
i and follower robot
k, a recursive structure of the terminal sliding function for high relative-degree MIMO systems (with
r1,
r2 > 1) is designed as
where
,
.
γik,1,
γik,2,
λik,1,
λik,2 are all positive constants.
pKj >
qKj, here
K,
j = 1, 2.
pKj and
qKj are all odd positive constants.
Theorem 1. Considering the derivative and integral terminal sliding mode surface Sik(t) with the fractional function, the state error of formation system can reach the equilibrium point e = 0 at the limited timeHere, t1K (K = 1, 2) is the reaching time of terminal slide mode eD1K. Proof. From (17), the sliding mode
sik starts on
t = 0. Then, the equations
and
can always hold true by control design. Subsequently, substituting
,
into
and
, respectively, yields
□
The converge time of sliding mode
and
can obtained by solving (19).
In sliding mode
sik = 0,
, and
can always hold true. Therefore, the reaching time of
and
are the same as the convergence time of
and
, respectively. When
,
and
will converge to zero successfully. At
t =
t1K (
K = 1, 2), the
and
are formulated by
Solving (21), the
,
from
,
to
will spend the time
Since the sliding mode sik = 0 consists of the derivative term and integral term, the time TK spending from sik.K = 0 (K = 1, 2) to eik,K = 0 (K = 1, 2) is the summation of the two terms. Since the fact that each sliding mode sik,1, sik,2 is independent, the time spent for equilibrium point is the max of the TK.
Hypothesis 2. . It means that the unmatched uncertainties of formation system (13) have a boundary.
Differentiating the sliding function
sik with the respect to time
t, and substituting (13) into the derivative of
sik can get
where
denotes the desired distance and angle between the leader robot and follower robots.
.
and
are depicted respectively by
The derivative and integral terminal sliding mode control law is set as
where
,
keik,
ηik are all the positive constant set by designer.
is the upper bound of the unmatched uncertainties.
,
(
K = 1, 2) are written as
Here,
,
χik and
keik meet the following conditions
Substitute the control law (25) into (23), considering the conditions (26). Then, can be guaranteed when holds true. However, apart from Hypothesis 2, the unmatched uncertainties in (13) are unknown, which means that the upper bound is also unknown. Therefore, it cannot select an appropriate parameter to guarantee . Therefore, the stability of control system cannot be guaranteed.
DIT-SMC Design Based NDOB
In order to resolve the above problem, the nonlinear disturbance is proposed to estimate the uncertainties in the leader–follower formation system (13). At first, the following assumption is taken into account.
Hypothesis 3. The unmatched uncertainties possess a slow change rate, meaning that , where.
Considering the formation dynamic model (6), the nonlinear disturbance observer is formulated by
Here
,
,
are the state vector of nonlinear disturbance observer, the observer gain matrix set by designer, and the estimated value of unmatched uncertainties respectively.
Define the estimate error vector as
Differentiate
edik with respect to time
t and take the Hypothesis 3 into account. Furthermore, the dynamics of
is presented as
The solution of (30) is , which indicates the estimate error will exponentially converge to zero as t → ∞ if is set as a positive constant. Here, is the initial state of .
Considering input–output dynamics (13) and observer (29), the control law based on NDOB is determined by
Theorem 2. Consider the dynamic model of leader–follower formation system (6), take the assumption 1, 2, 3, 4 into account, adopt the input–output model (13), design the derivative and integral terminal sliding mode surface (17) and nonlinear disturbance observer (29). If the derivative and integral terminal control law is set as (31), the leader–follower formation system with unmatched uncertainties is asymptotically stable when .
Proof. Selecting the Lyapunov function as
, differentiating
Vik with the respect to time
t and substituting the
into the derivative of
Vik yields
Here,
. Since
p1K > 0,
q1K > 0,
p2K > 0,
q2K > 0,
p1K >
q1K,
p2k >
q2K exist in the controller,
and
hold true for all
,
. According to the Hypothesis 1, (27), the second term and the third term can be deduced by
□
In (33), the condition can be picked up so that the holds true.
The first term of
has the following form of
, can be selected in the control design in order to ensure is held true.
can be picked up by deducing from (32)–(34). That illustrates the control law can asymptotically stabilize the leader–follower formation system by the derivative and integral terminal sliding mode. Therefore, the follower robots can trace the leader robot with the desired distance and angle steadily. The characteristics of DIT-SMC method are as follows: (1) the convergence time Tk can be adjusted by the parameters of the control law; (2) the formation system starts on the derivative and integral terminal sliding surface; (3) the singular problem of T-SMC is avoided; (4) the derivative term can weaken the nonlinear effect.
In (31), the parameter must be assigned as a conservative value to guarantee the formation system stability. From (30), edik can be exponentially convergent to 02×1 by selecting Lik, meaning that κik can be very small. Even if κik is assigned from a conservative perspective, its value may not be very large. That illustrates the DIT-SMC based NDOB control law protects the formation from the high switching frequency problem, and can substantially alleviate the chattering problem.
4. Numerical Simulations
Considering the dynamic model of the leader–follower formation system (6), the derivative and integral terminal sliding mode controller is proposed. There are three robots in the leader–follower framework, where the two follower robots track along with the leader robot. The radius of each robot is 0.05 m. The parameter fluctuations in formation system are determined by
where
i = 1 denotes the leader robot, and
k = 2, 3 represent the two follower robots. The uncertainties and external disturbances in lumped model (6) are depicted by
The parameters in control design are set as γ12,1 = γ12,2 = γ13,1 = γ13,2 = 4, λ12,1 = λ12,2 = λ13,1 = λ13,2 = 1, p11 = p12 = 9, q11 = q12 = 7, q21 = 3, p21 = 5, q22 = 7, p22 = 9, ke12 = ke13 = 20, ε12 = ε13 = 4, k12 = k13 = 2, δ12 = δ13 = 4, η12 = η13 = 0.2.
Considering the circle trajectory for the formation system in
Figure 3, the initial state vector is respectively set as
= [0.5 m 0 m/s
−1 3.2π/4 rad 0 rad/s],
= [0.707 m 0 m/s
−1 3π/4 rad 0 rad/s]. The desired state vectors are respectively designated as
= [0.13 m 0 m/s
−1 π/2 rad 0 rad/s],
= [0.26 m 0 m/s
−1 π/2 rad 0 rad/s]. The desired linear and angular velocities of leader robot are designated as
,
. The simulation results are shown in
Figure 4,
Figure 5 and
Figure 6.
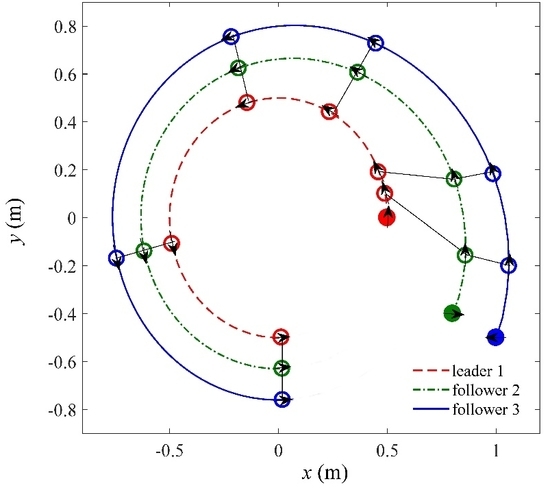
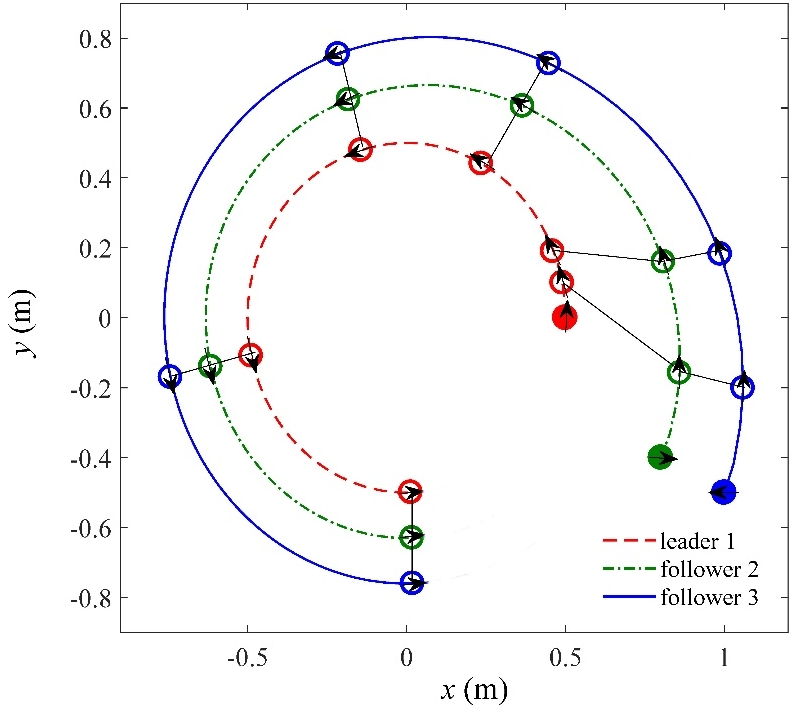
Figure 3 displays the moving curve of the formation system, which shows the robots are in a line while moving along the circular trajectory. In
Figure 3, the solid point denotes the initial position of the formation robots. The arrows are the moving directions of the three robots. It is seen form the
Figure 3 that the follower can track the leader robot with the desired distance and angle, while the leader robot tracks the circular trajectory.
In order to provide more insight into the system performance, some comparisons among the SMC method, the second-order SMC, the SMC based NDOB [
18], and the DIT-SMC based NDOB are shown in
Figure 4,
Figure 5 and
Figure 6. The parameters of the sole SMC and SMC based NDOB method are presented in [
18], and the parameters of second-order SMC are same as paper [
20]. The relative distance and relative angular between the leader robot 1 and the two follower robots 2, 3 are displayed in
Figure 4. Comparing with the SMC method, the second-order SMC and the SMC based NDOB, the DIT-SMC based NDOB method has shorter convergence time and smoother than the other methods.
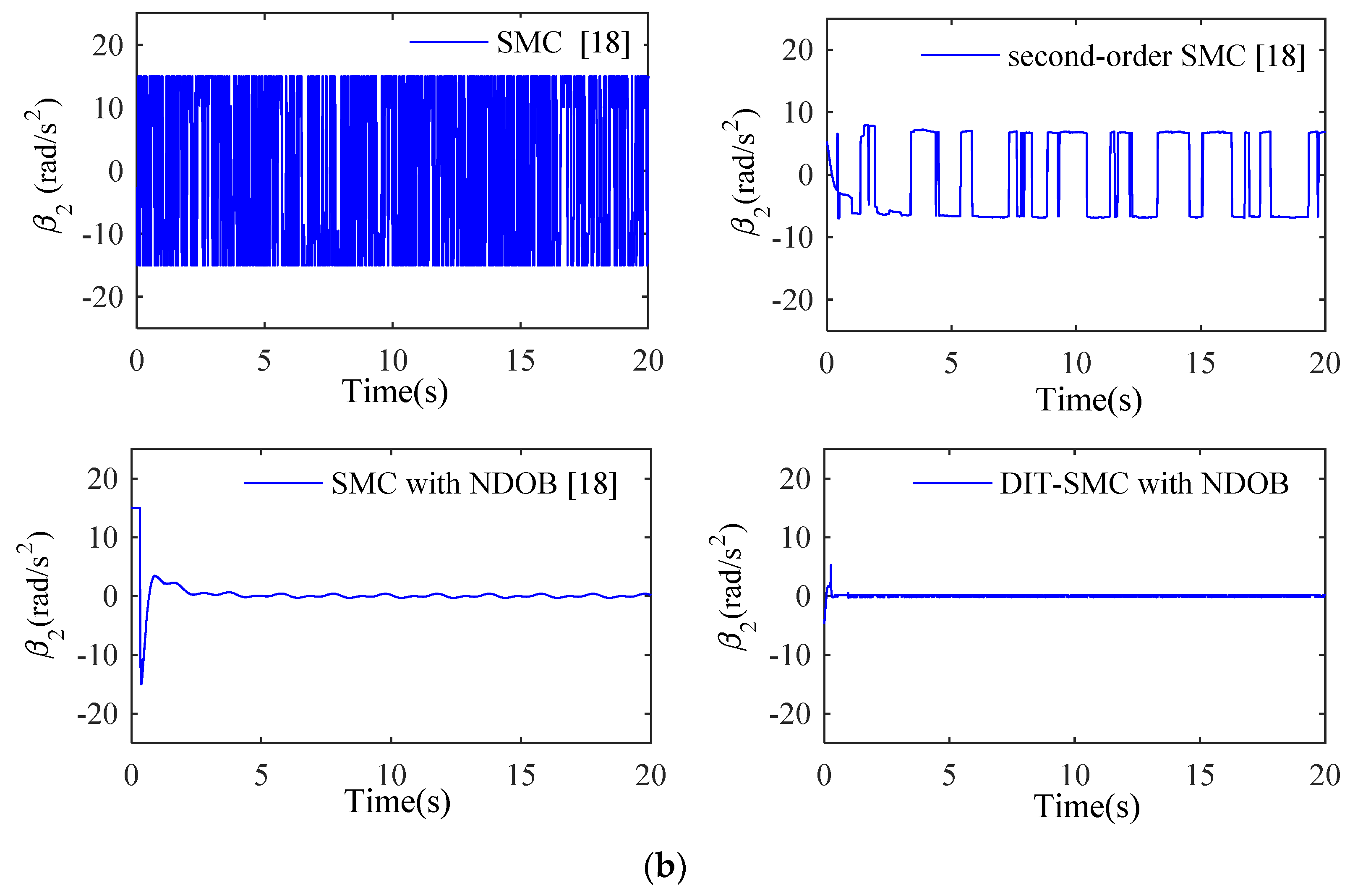
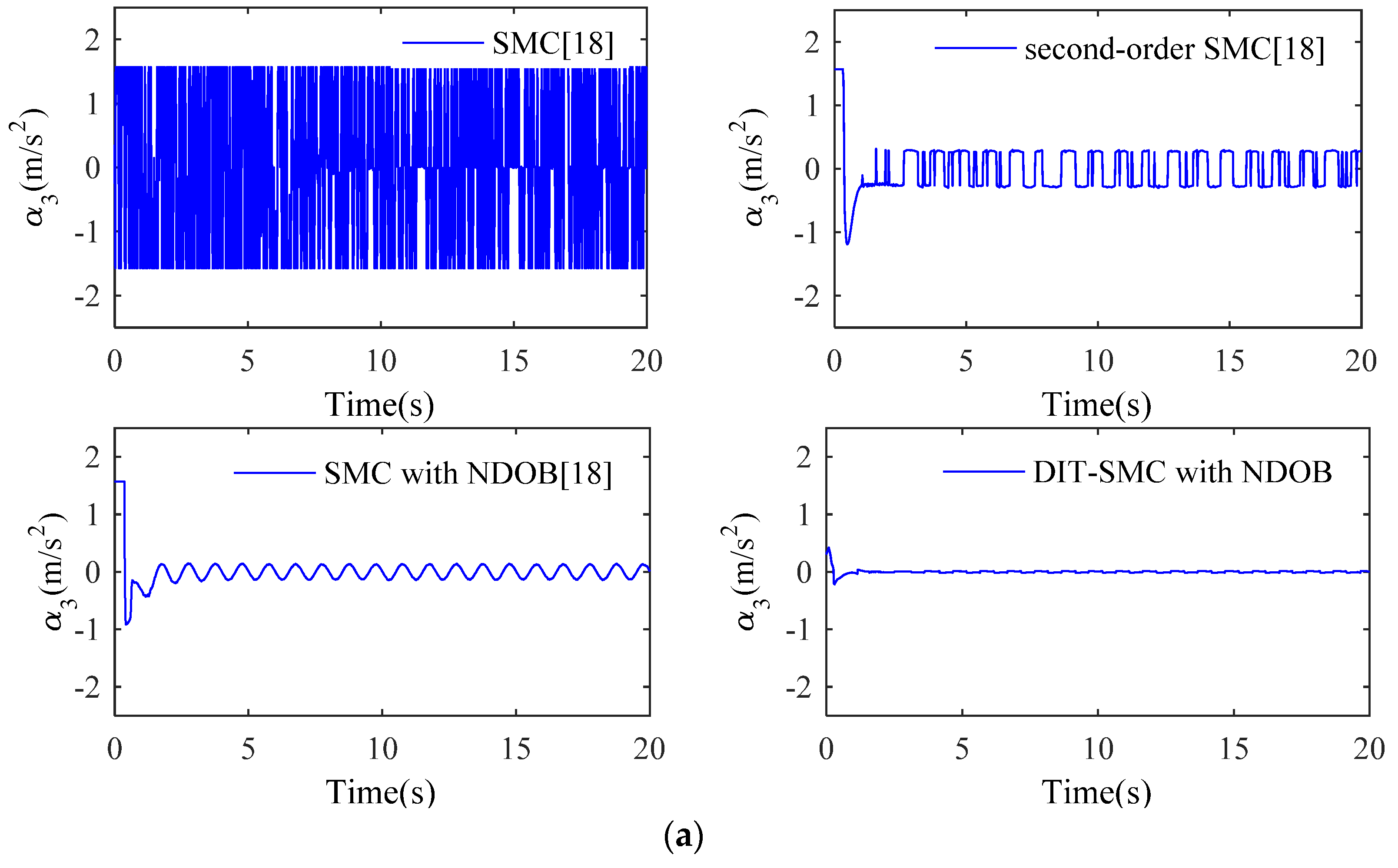
Figure 5 denotes the control input of follower robot 2 using different control method. In
Figure 5a, the acceleration of follower robot 2 are shown, while the angular accelerations of follower robot 2 are displayed in
Figure 5b. From
Figure 5a,b, the control input of DIT-SMC based NDOB is smoother than other control methods, which denotes the acceleration and angular acceleration are more stable.
The control inputs of follower robot 3 are shown in the
Figure 6, which denotes the acceleration and angular acceleration of follower robot 3. The accelerations of follower robot of follower robot using the three control methods are displayed in
Figure 6a, while the angular acceleration using three methods are shown in
Figure 6b. From
Figure 5 and
Figure 6, the combination of the DIT-SMC and NDOB can benefit the decrease of the chattering phenomenon that is an inherent drawback of the SMC methodology.
Figure 7 denotes the sliding mode vectors of two follower robots. As proven in the Theorem 1, the reaching time of sliding surface will be eliminated, and the error of formation system will reach to the equilibrium point in the finite time. From
Figure 7, the formation system can enter the sliding mode in the beginning, which can guarantee the system stability.
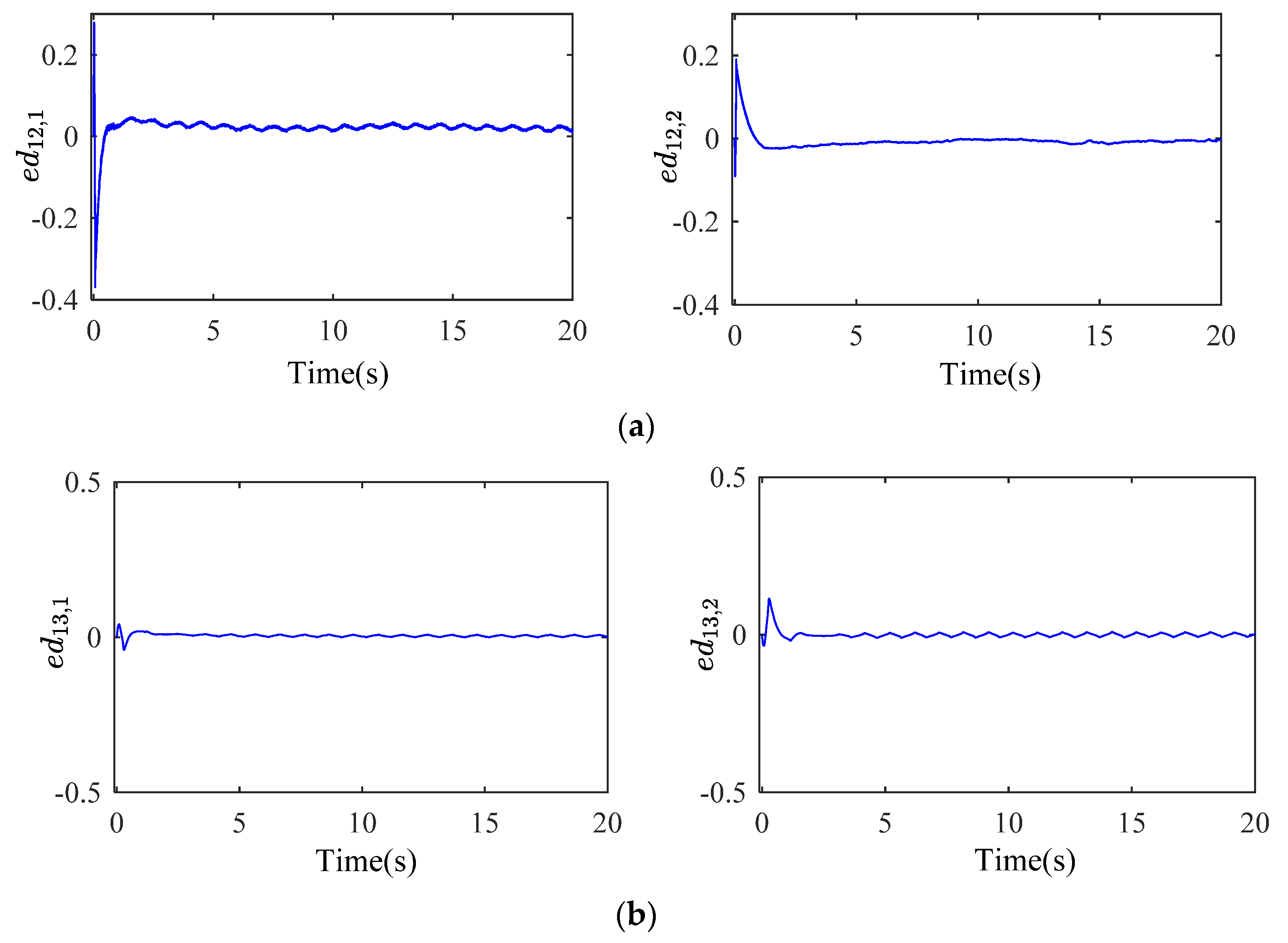
Figure 8 illustrates the elements of the estimate-error vectors, where the vectors
ed12 are shown in the
Figure 8a, and the vectors
ed13 are shown in the
Figure 8b. From the
Figure 8, the estimate-error can converge to zero in the finite time. The value of estimate-error is max when
t = 0, that is, the maximum is less than 0.5. However, the value of
kik is selected 2. Therefore, the system stability can be guaranteed.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









