Dynamic Optimization Using Local Collocation Methods and Improved Multiresolution Technique

Abstract
:1. Introduction
2. Problem Statement and Local Collocation Methods
3. Improved Multiresolution Technique
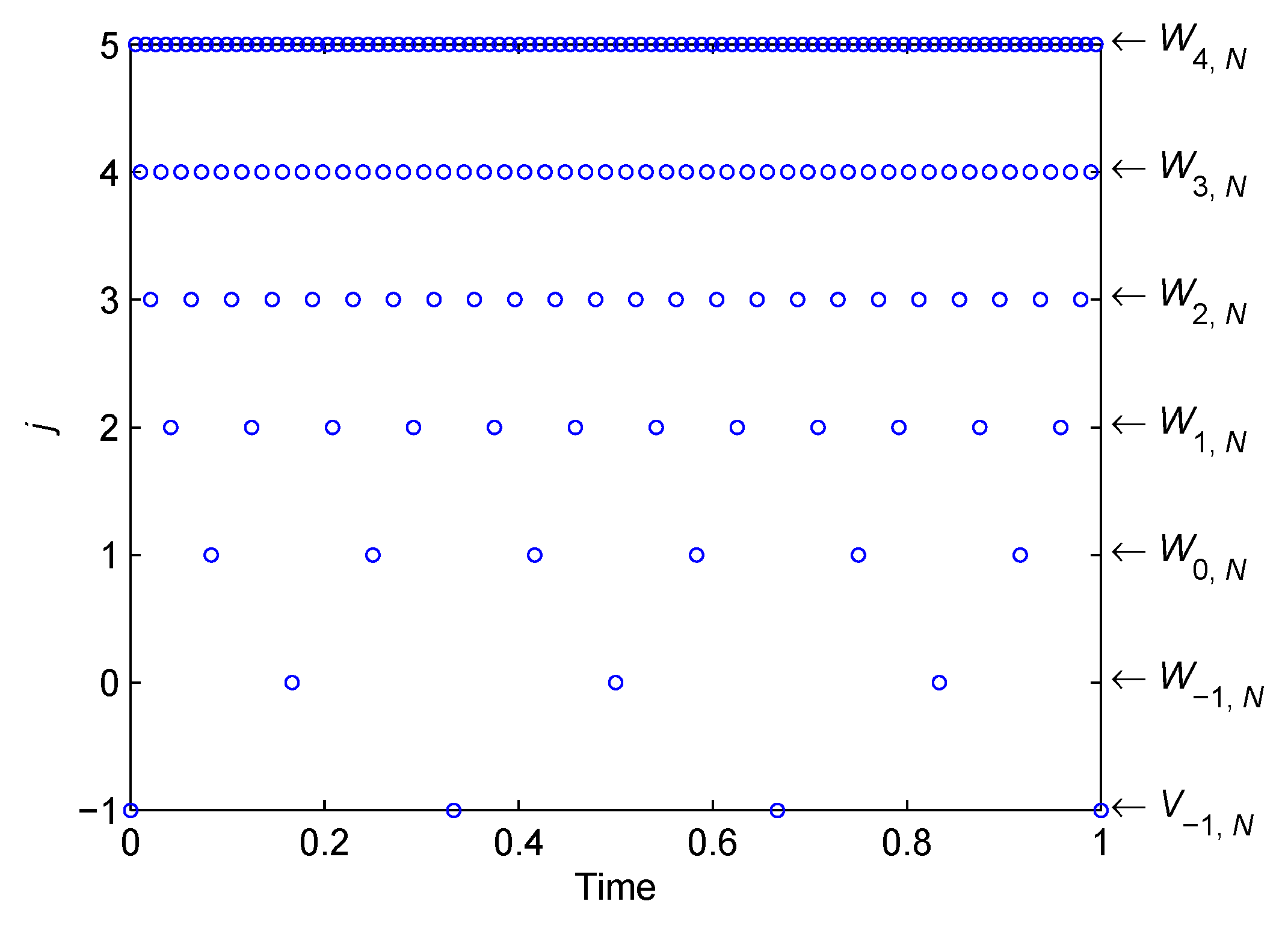
3.1. New Generalized Dyadic Meshes
3.2. Slope Analysis of Control Variable
3.3. Improved Multiresolution Technique
- (1)
- Solve the discretized dynamic optimization problem on mesh Gold with χold as the initial values for the NLP variables. If I ≥ Imax, terminate; otherwise move on to the next step.
- (2)
- Refine the mesh Gold via the following steps (step 2a to step 2f):
- (a)
- Let .
- (b)
- Initialize Gint = V0, N, , and j = −1.
- (c)
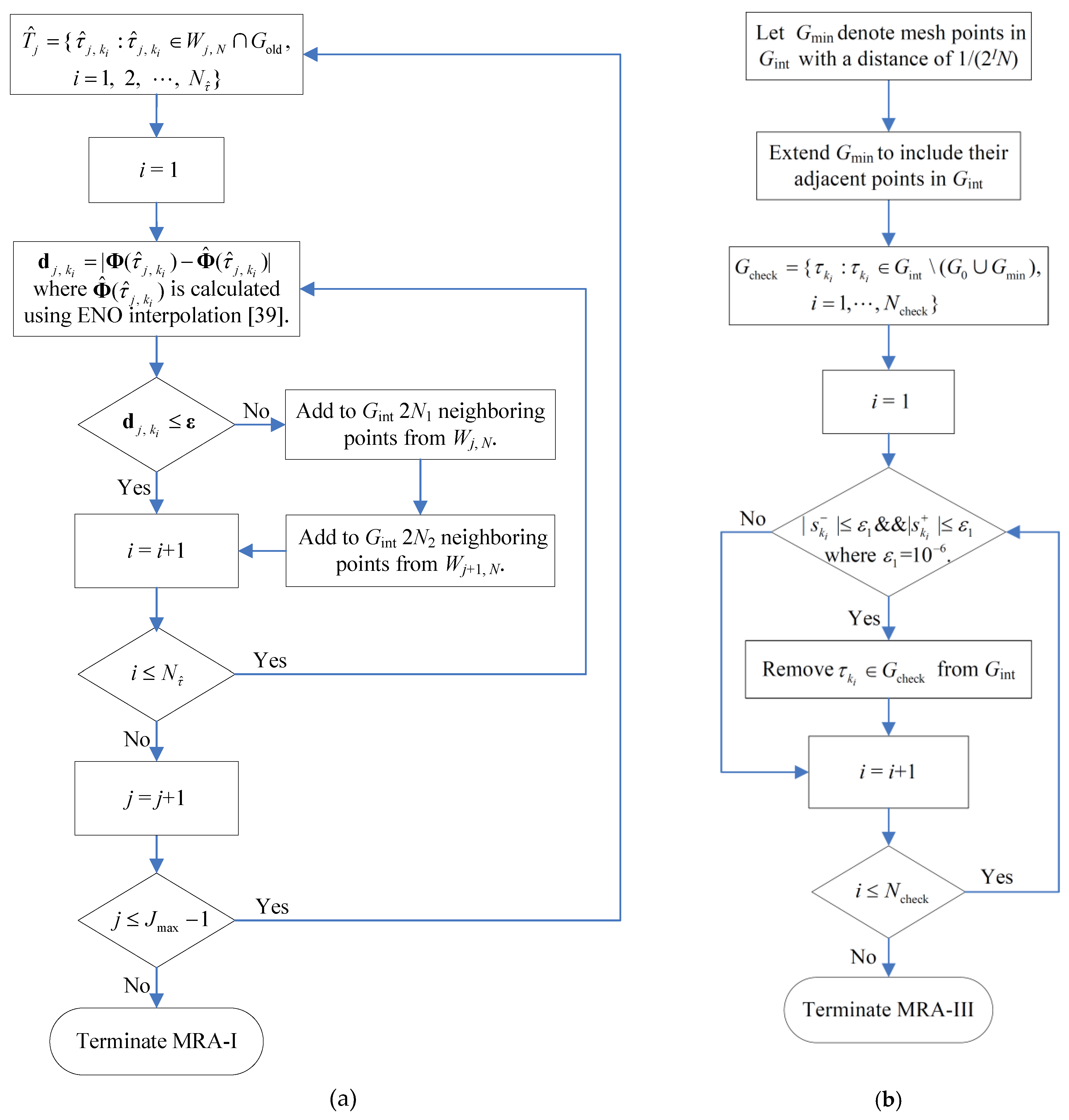
- Mesh refinement algorithm I (MRA-I).
- (d)
- Mesh refinement algorithm II (MRA-II).
- (e)
- Mesh refinement algorithm III (MRA-III).
- (f)
- The refined mesh is Gnew = Gint, with the control values Φnew = Φint.
- (3)
- Set I = I + 1. If Gnew is the same as Gold, stop; otherwise, renew χold by interpolating the NLP solution that is solved in step 1 on Gnew, set Gold = Gnew, and go to step 1.
4. Numerical Examples
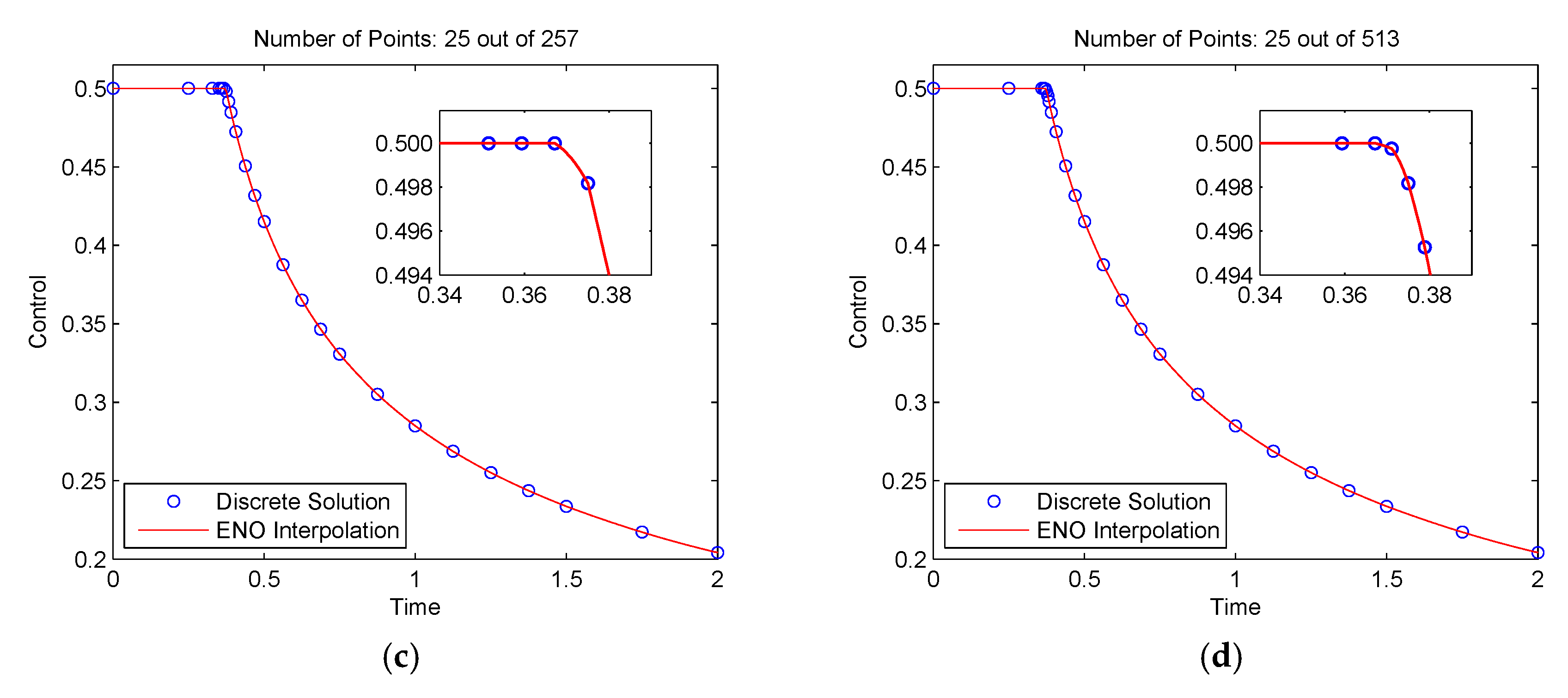
4.1. Simple Chemical Reaction Problem
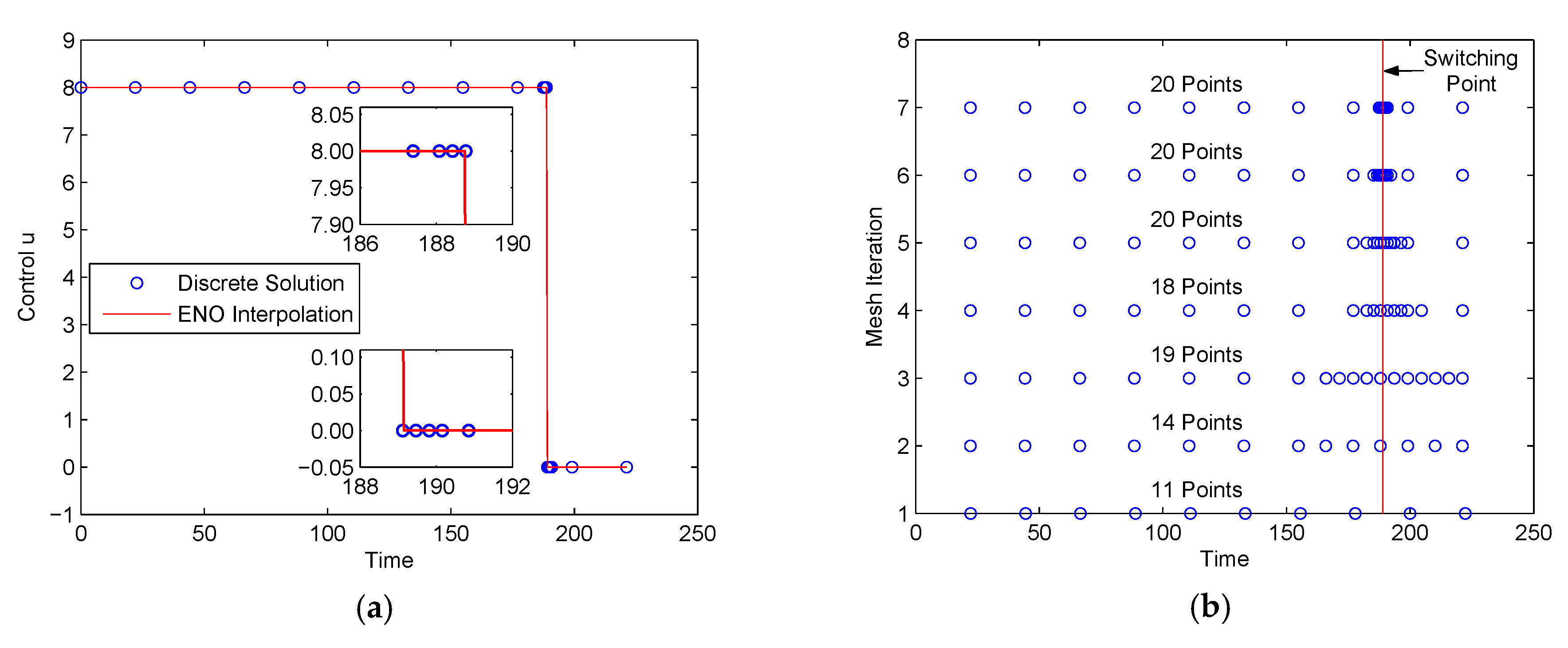
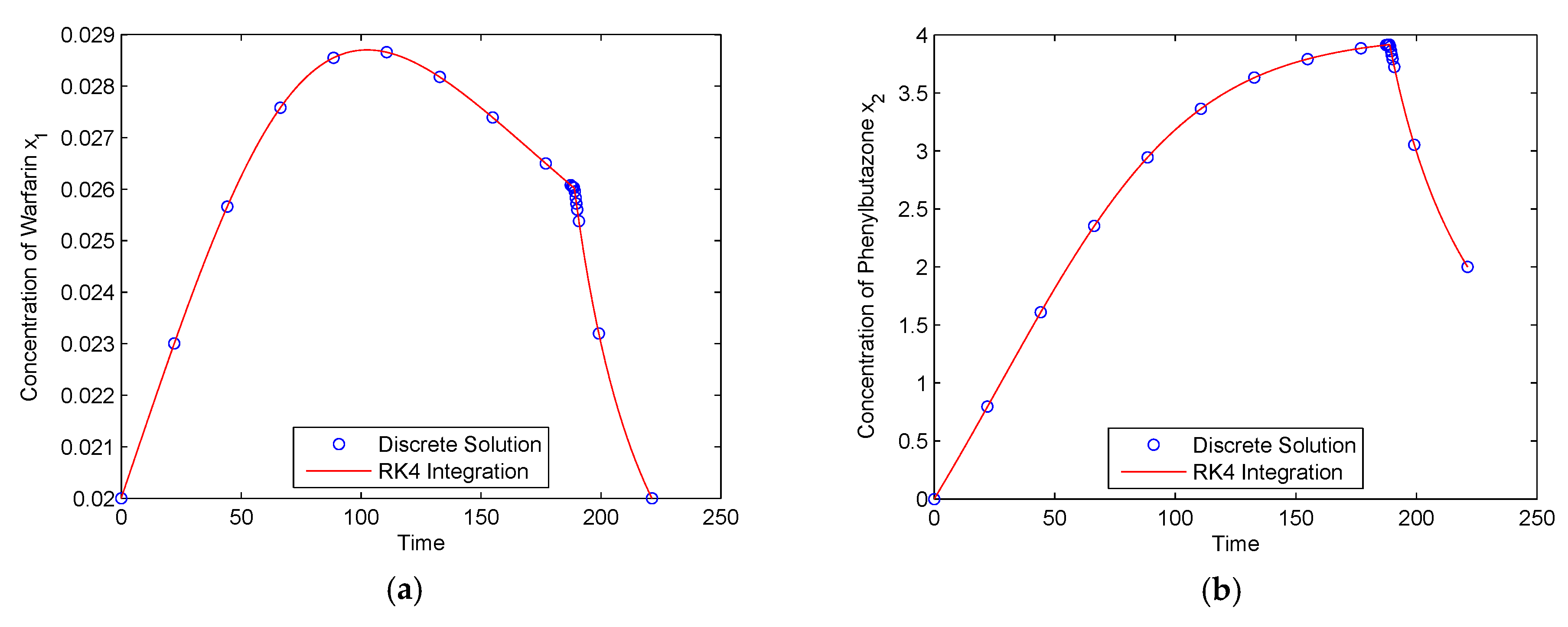
4.2. Drug Displacement Problem
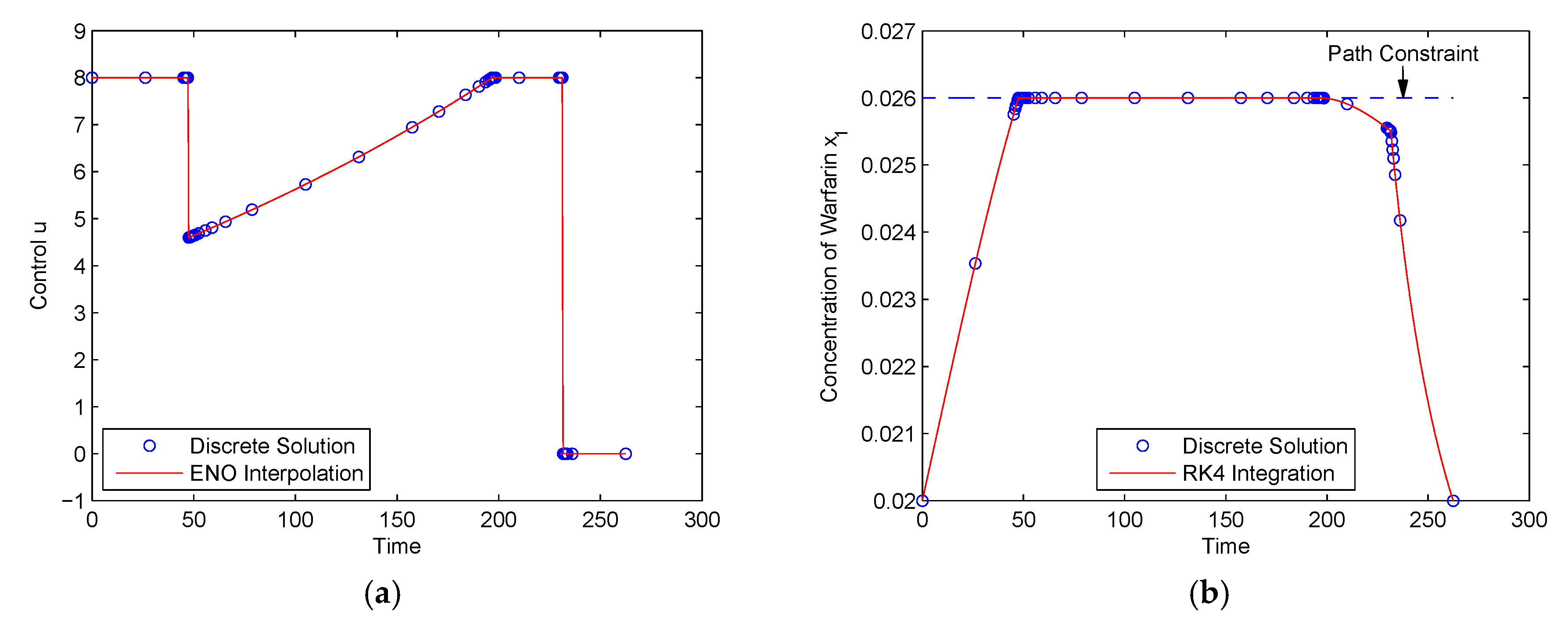
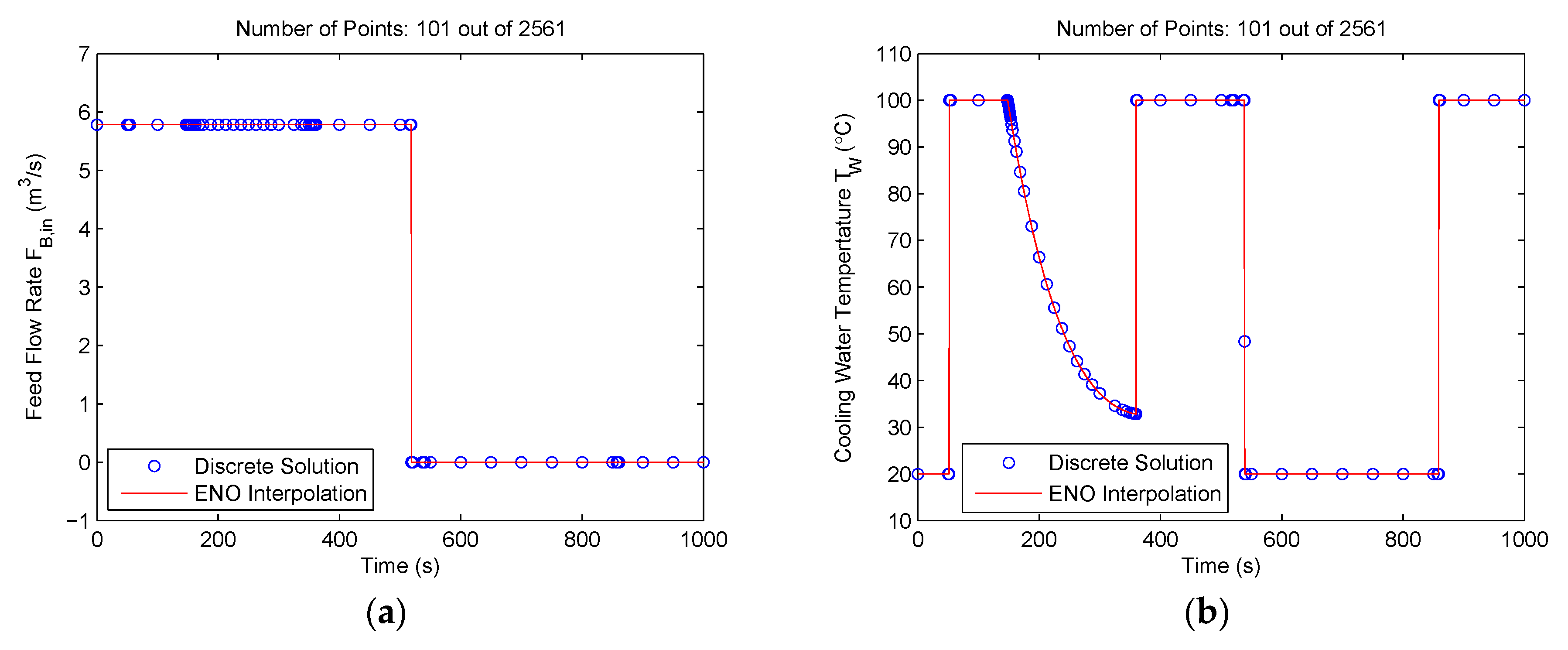
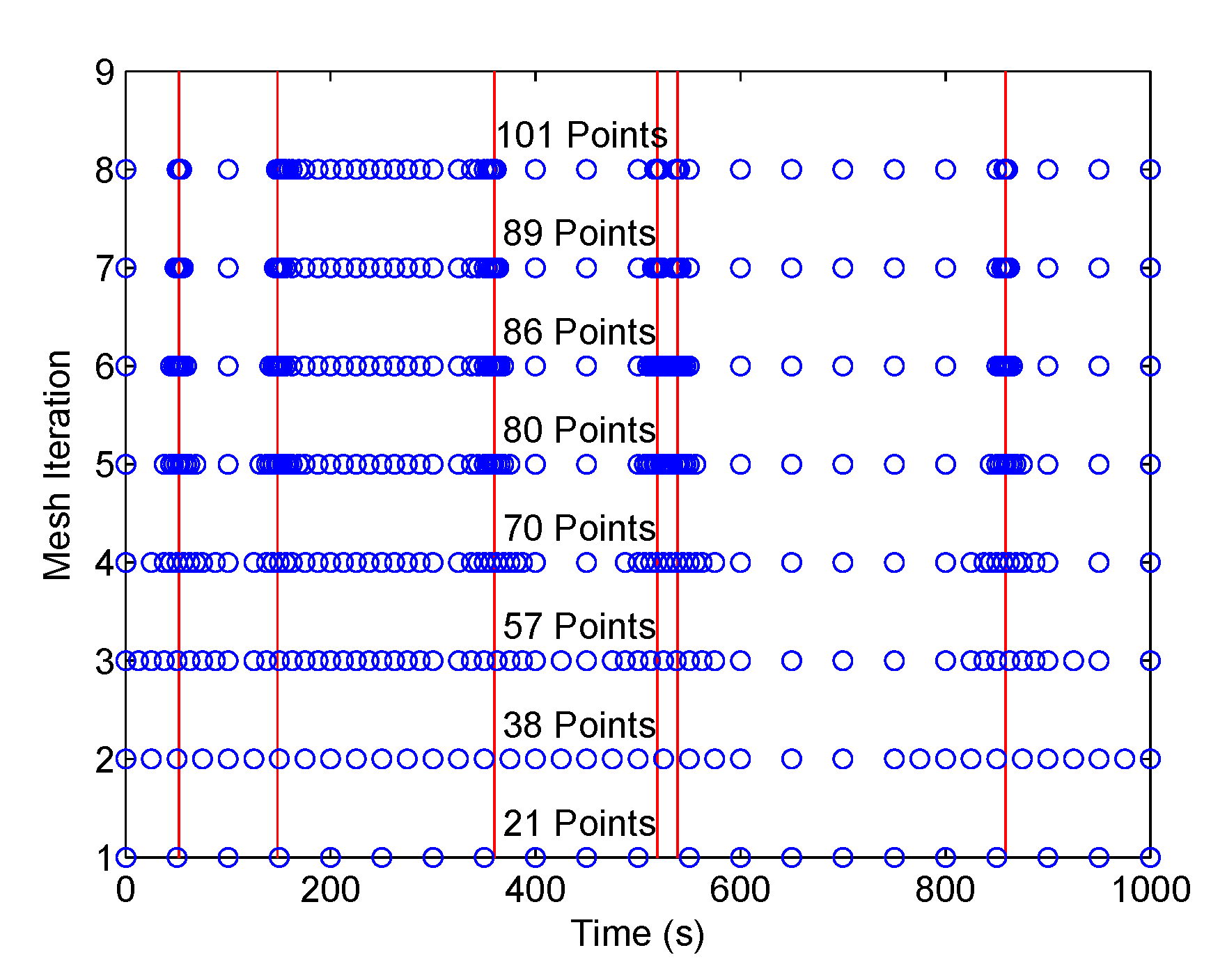
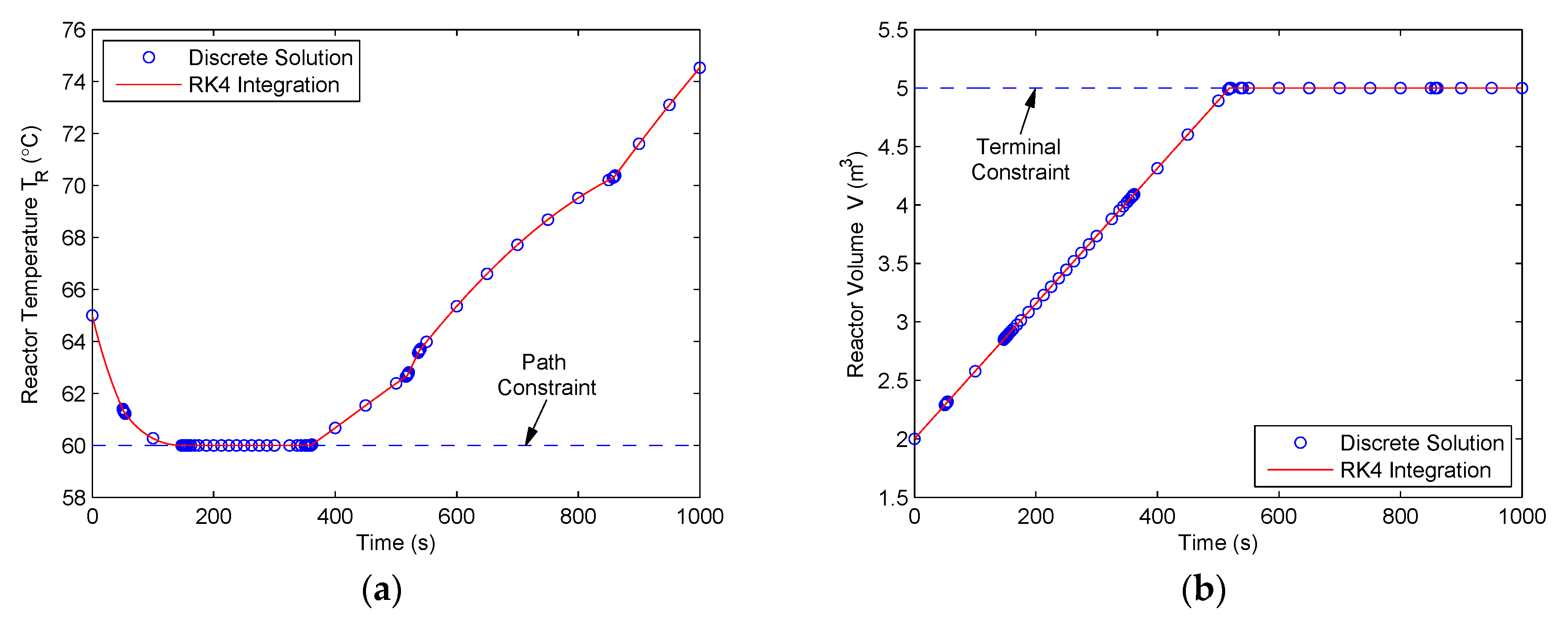
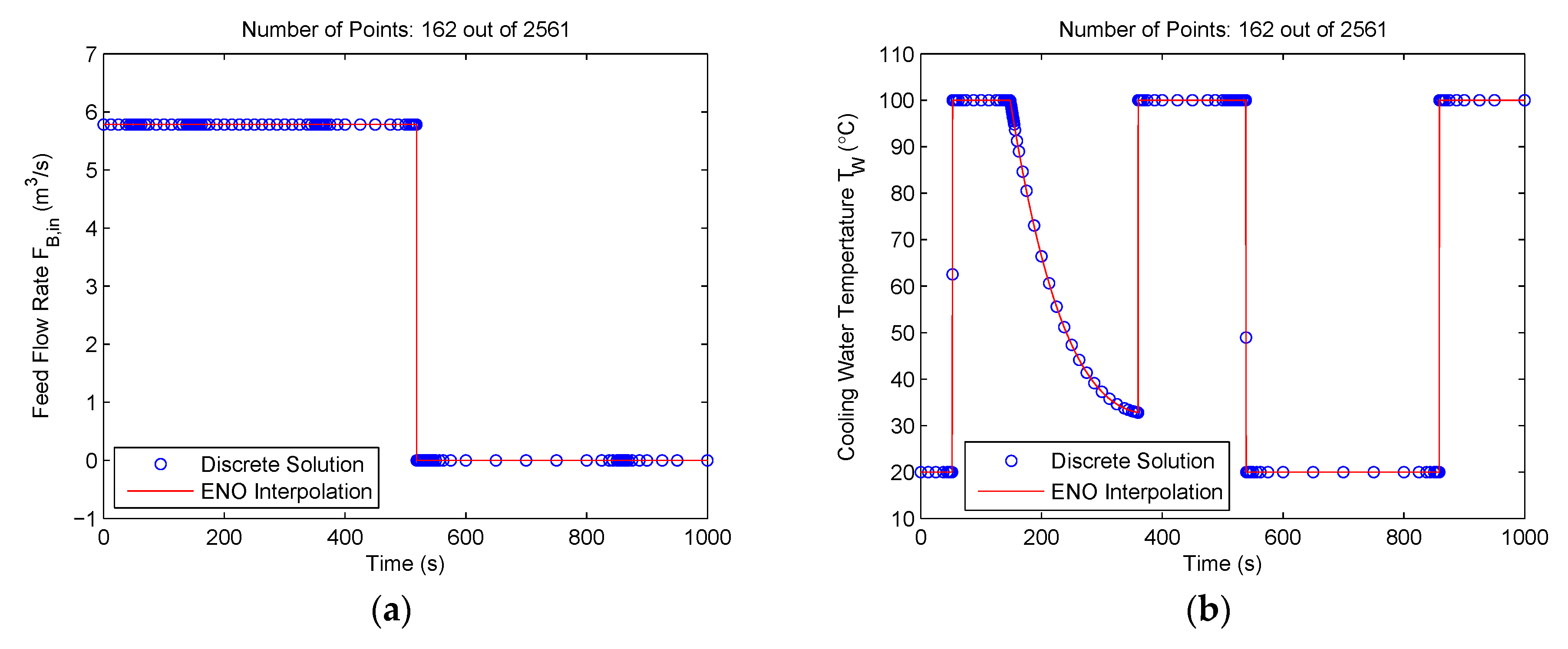
4.3. Williams‒Otto Semi-Batch Reactor Control Problem
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Fahroo, F.; Ross, I.M. Direct Trajectory Optimization by a Chebyshev Pseudospectral Method. J. Guid. Control Dyn. 2002, 25, 160–166. [Google Scholar] [CrossRef] [Green Version]
- David, B. A Gauss Pseudospectral Transcription for Optimal Control. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, UK, 2005. [Google Scholar]
- Betts, J.T. Practical Methods for Optimal Control and Estimation Using Nonlinear Programming, Advances in Design and Control Series; Soc. for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2009. [Google Scholar]
- Bryson, A.E.; Ho, Y.C. Applied Optimal Control: Optimization, Estimation, and Control; Hemisphere Pub. Corp.: Washington, DC, USA, 1975. [Google Scholar]
- Hannemann-Tamás, R.; Marquardt, W. How to Verify Optimal Controls Computed by Direct Shooting Methods?—A Tutorial. J. Process. Control 2012, 22, 494–507. [Google Scholar] [CrossRef]
- Grant, M.J.; Braun, R.D. Rapid Indirect Trajectory Optimization for Conceptual Design of Hypersonic Missions. J. Spacecr. Rocket. 2015, 52, 177–182. [Google Scholar] [CrossRef]
- Gill, P.E.; Murray, W.; Saunders, M.A. SNOPT: An SQP Algorithm for Large-Scale Constrained Optimization. Siam Rev. 2005, 47, 99–131. [Google Scholar] [CrossRef]
- Biegler, L.T.; Zavala, V.M. Large-Scale Nonlinear Programming Using IPOPT: An Integrating Framework for Enterprise-Wide Dynamic Optimization. Comput Chem. Eng. 2009, 33, 575–582. [Google Scholar] [CrossRef]
- Polak, E. An Historical Survey of Computational Methods in Optimal Control. Siam Rev. 1973, 15, 553–584. [Google Scholar] [CrossRef]
- Betts, J.T. Survey of Numerical Methods for Trajectory Optimization. J. Guid. Control Dyn. 1998, 21, 193–207. [Google Scholar] [CrossRef]
- Biegler, L.T. An Overview of Simultaneous Strategies for Dynamic Optimization. Chem. Eng. Process. Process Intensif. 2007, 46, 1043–1053. [Google Scholar] [CrossRef]
- Rao, A.V. A Survey of Numerical Methods for Optimal Control. Adv. Astron. Sci. 2009, 135, 497–528. [Google Scholar]
- Bock, H.G.; Plitt, K.J. A Multiple Shooting Algorithm for Direct Solution of Optimal Control Problems. In Proceedings of the IFAC World Congress, Budapest, Hungary, 2–6 July 1984. [Google Scholar]
- Assassa, F.; Marquardt, W. Dynamic Optimization Using Adaptive Direct Multiple Shooting. Comput. Chem. Eng. 2014, 60, 242–259. [Google Scholar] [CrossRef]
- Lu, P. Inverse Dynamics Approach to Trajectory Optimization for an Aerospace Plane. J. Guid. Control Dyn. 1993, 16, 726–732. [Google Scholar] [CrossRef]
- Huntington, G.T. Advancement and Analysis of a Gauss Pseudospectral Transcription for Optimal Control Problems; Massachusetts Institute of Technology: Cambridge, MA, USA, 2007. [Google Scholar]
- Schlegel, M.; Stockmann, K.; Binder, T.; Marquardt, W. Dynamic Optimization Using Adaptive Control Vector Parameterization. Comput. Chem. Eng. 2005, 29, 1731–1751. [Google Scholar] [CrossRef]
- Binder, T.; Cruse, A.; Villar, C.; Marquardt, W. Dynamic Optimization Using a Wavelet Based Adaptive Control Vector Parameterization Strategy. Comput. Chem. Eng. 2000, 24, 1201–1207. [Google Scholar] [CrossRef]
- Banga, J.R.; Balsa-Canto, E.; Moles, C.G.; Alonso, A.A. Dynamic Optimization of Bioprocesses: Efficient and Robust Numerical Strategies. J. Biotechnol. 2005, 117, 407–419. [Google Scholar] [CrossRef] [PubMed]
- Hannemann, R.; Marquardt, W. Continuous and Discrete Composite Adjoints for the Hessian of the Lagrangian in Shooting Algorithms for Dynamic Optimization. Siam J. Sci. Comput. 2010, 31, 4675–4695. [Google Scholar] [CrossRef]
- Liu, P.; Li, G.; Liu, X.; Zhang, Z. Novel Non-Uniform Adaptive Grid Refinement Control Parameterization Approach for Biochemical Processes Optimization. Biochem. Eng. J. 2016, 111, 63–74. [Google Scholar] [CrossRef]
- Wang, L.; Liu, X.; Zhang, Z. A New Sensitivity-Based Adaptive Control Vector Parameterization Approach for Dynamic Optimization of Bioprocesses. Bioprocess. Biosyst. Eng. 2017, 40, 181–189. [Google Scholar] [CrossRef] [PubMed]
- Tsay, C.; Pattison, R.C.; Baldea, M. A Pseudo-Transient Optimization Framework for Periodic Processes: Pressure Swing Adsorption and Simulated Moving Bed Chromatography. Aiche J. 2018, 64, 2982–2996. [Google Scholar] [CrossRef]
- Patrascu, M.; Barton, P.I. Optimal Campaigns in End-To-End Continuous Pharmaceuticals Manufacturing. Part 2: Dynamic Optimization. Chem. Eng. Process. Process Intensif. 2018, 125, 124–132. [Google Scholar] [CrossRef]
- Jain, S.; Tsiotras, P. Multiresolution-Based Direct Trajectory Optimization. In Proceedings of the 46th IEEE Conference on Decision and Control, Piscataway, NJ, USA, 12–14 December 2007. [Google Scholar]
- Jain, S.; Tsiotras, P. Trajectory Optimization Using Multiresolution Techniques. J. Guid. Control Dyn. 2008, 31, 1424–1436. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Li, S. Modified Multiresolution Technique for Mesh Refinement in Numerical Optimal Control. J. Guid. Control Dyn. 2017, 40, 3328–3338. [Google Scholar] [CrossRef]
- Zhao, Y.; Tsiotras, P. Density Functions for Mesh Refinement in Numerical Optimal Control. J. Guid. Control Dyn. 2011, 34, 271–277. [Google Scholar] [CrossRef]
- Schwartz, A.L. Theory and Implementation of Numerical Methods Based on Runge-Kutta Integration for Solving Optimal Control Problems. Ph.D. Thesis, University of California, Berkeley, CA, USA, 1996. [Google Scholar]
- Betts, J.T.; Huffman, W.P. Mesh Refinement in Direct Transcription Methods for Optimal Control. Optim. Control Appl. Methods 1998, 19, 1–21. [Google Scholar] [CrossRef]
- Betts, J.T.; Biehn, N.; Campbell, S.L.; Huffman, W.P. Compensating for Order Variation in Mesh Refinement for Direct Transcription Methods. J. Comput. Appl. Math. 2000, 125, 147–158. [Google Scholar] [CrossRef]
- Ross, I.M.; Fahroo, F. Pseudospectral Knotting Methods for Solving Optimal Control Problems. J. Guid. Control Dyn. 2004, 27, 397–405. [Google Scholar] [CrossRef]
- Gong, Q.; Fahroo, F.; Ross, I.M. Spectral Algorithm for Pseudospectral Methods in Optimal Control. J. Guid. Control Dyn. 2008, 31, 460–471. [Google Scholar] [CrossRef] [Green Version]
- Darby, C.L.; Hager, W.W.; Rao, A.V. An hp-Adaptive Pseudospectral Method for Solving Optimal Control Problems. Optim. Control Appl. Methods 2011, 32, 476–502. [Google Scholar] [CrossRef]
- Darby, C.L.; Hager, W.W.; Rao, A.V. Direct Trajectory Optimization Using a Variable Low-Order Adaptive Pseudospectral Method. J. Spacecr. Rocket. 2011, 48, 433–445. [Google Scholar] [CrossRef] [Green Version]
- Patterson, M.A.; Hager, W.W.; Rao, A.V. A ph Mesh Refinement Method for Optimal Control. Optim. Control Appl. Methods 2015, 36, 398–421. [Google Scholar] [CrossRef]
- Liu, F.; Hager, W.W.; Rao, A.V. Adaptive Mesh Refinement Method for Optimal Control Using Decay Rates of Legendre Polynomial Coefficients. IEEE Trans Control Syst. Technol. 2017, 26, 1475–1483. [Google Scholar] [CrossRef]
- Liu, F.; Hager, W.W.; Rao, A.V. Adaptive Mesh Refinement Method for Optimal Control Using Nonsmoothness Detection and Mesh Size Reduction. J. Franklin Inst. 2015, 352, 4081–4106. [Google Scholar] [CrossRef]
- Harten, A.; Engquist, B.; Osher, S.; Chakravarthy, S.R. Uniformly High Order Accurate Essentially Non-Oscillatory Schemes. III. J. Comput. Phys. 1997, 131, 3–47. [Google Scholar] [CrossRef]
- Maurer, H.; Wiegand, M. Numerical Solution of a Drug Displacement Problem with Bounded State Variables. Optim. Control Appl. Methods 1992, 13, 43–55. [Google Scholar] [CrossRef]
- Rump, S.M. INTLAB—INTerval LABoratory. In Developments in Reliable Computing; Csendes, T., Ed.; Kluwer: Dordrecht, The Netherlands, 1999; pp. 77–104. ISBN 978-94-017-1247-7. [Google Scholar]
- Assassa, F.; Marquardt, W. Exploitation of the Control Switching Structure in Multi-Stage Optimal Control Problems by Adaptive Shooting Methods. Comput. Chem. Eng. 2015, 73, 82–101. [Google Scholar] [CrossRef]
- Patterson, M.A.; Rao, A.V. GPOPS–II: A MATLAB Software for Solving Multiple-Phase Optimal Control Problems Using hp-Adaptive Gaussian Quadrature Collocation Methods and Sparse Nonlinear Programming. ACM Trans. Math. 2014, 41, 1–37. [Google Scholar] [CrossRef]
- Patterson, M.A.; Rao, A.V. Exploiting Sparsity in Direct Collocation Pseudospectral Methods for Solving Optimal Control Problems. J. Spacecr. Rocket. 2012, 49, 364–377. [Google Scholar] [CrossRef]
- Sayood, K. Introduction to Data Compression; Morgan Kaufmann Publishers: Burlington, MA, USA, 2018. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Objective 1 | Mesh Iterations | Mesh Points | Max Resolution | CPU Time (s) |
|---|---|---|---|---|---|
| The proposed method | 4768.313612 | 8 | 101 | 2561 | 10.7 |
| The proposed method (ignoring MRA-III) | 4768.313475 | 8 | 162 | 2561 | 21.5 |
| GPOPS-II [35] | 4768.313425 | 13 | 309 | — | 21.1 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Shang, T. Dynamic Optimization Using Local Collocation Methods and Improved Multiresolution Technique. Appl. Sci. 2018, 8, 1680. https://doi.org/10.3390/app8091680
Zhao J, Shang T. Dynamic Optimization Using Local Collocation Methods and Improved Multiresolution Technique. Applied Sciences. 2018; 8(9):1680. https://doi.org/10.3390/app8091680
Chicago/Turabian StyleZhao, Jisong, and Teng Shang. 2018. "Dynamic Optimization Using Local Collocation Methods and Improved Multiresolution Technique" Applied Sciences 8, no. 9: 1680. https://doi.org/10.3390/app8091680
APA StyleZhao, J., & Shang, T. (2018). Dynamic Optimization Using Local Collocation Methods and Improved Multiresolution Technique. Applied Sciences, 8(9), 1680. https://doi.org/10.3390/app8091680