Data Interpretation Technology of GPR Survey Based on Variational Mode Decomposition



Abstract
:Featured Application
Abstract
1. Introduction
2. Theory and Methodology
2.1. The Instantaneous Frequency Based on VMD Theory
2.1.1. VMD Theory
- (1)
- Every IMF component was taken as the Hilbert transform, so that the analytic signal could be obtained.where is the Dirichlet function and is K IMF.
- (2)
- The analytic signal of the estimated central frequency can be changed to the baseband by using frequency shift.where is the central frequency.
- (3)
- The norm of the module signal was solved, and the bandwidth of every mode was estimated. The variational problem was constructed, as follows:
2.1.2. The Instantaneous Frequency Spectrum Solution
2.2. Time-Frequency Analysis Method of GPR
3. Comparison of VMD, EMD, and EEMD
4. Time Frequency Analysis of GPR Simulation Signal
4.1. Time Frequency Analysis of VMD
4.2. Time Frequency of VMD Comparison with Other Methods
5. The Analysis of Real Exploration GPR Signals
6. Conclusions
- (1)
- The VMD method is better at overcoming the influences of mode aliasing and endpoint effects as compared to the traditional methods EMD and EEMD.
- (2)
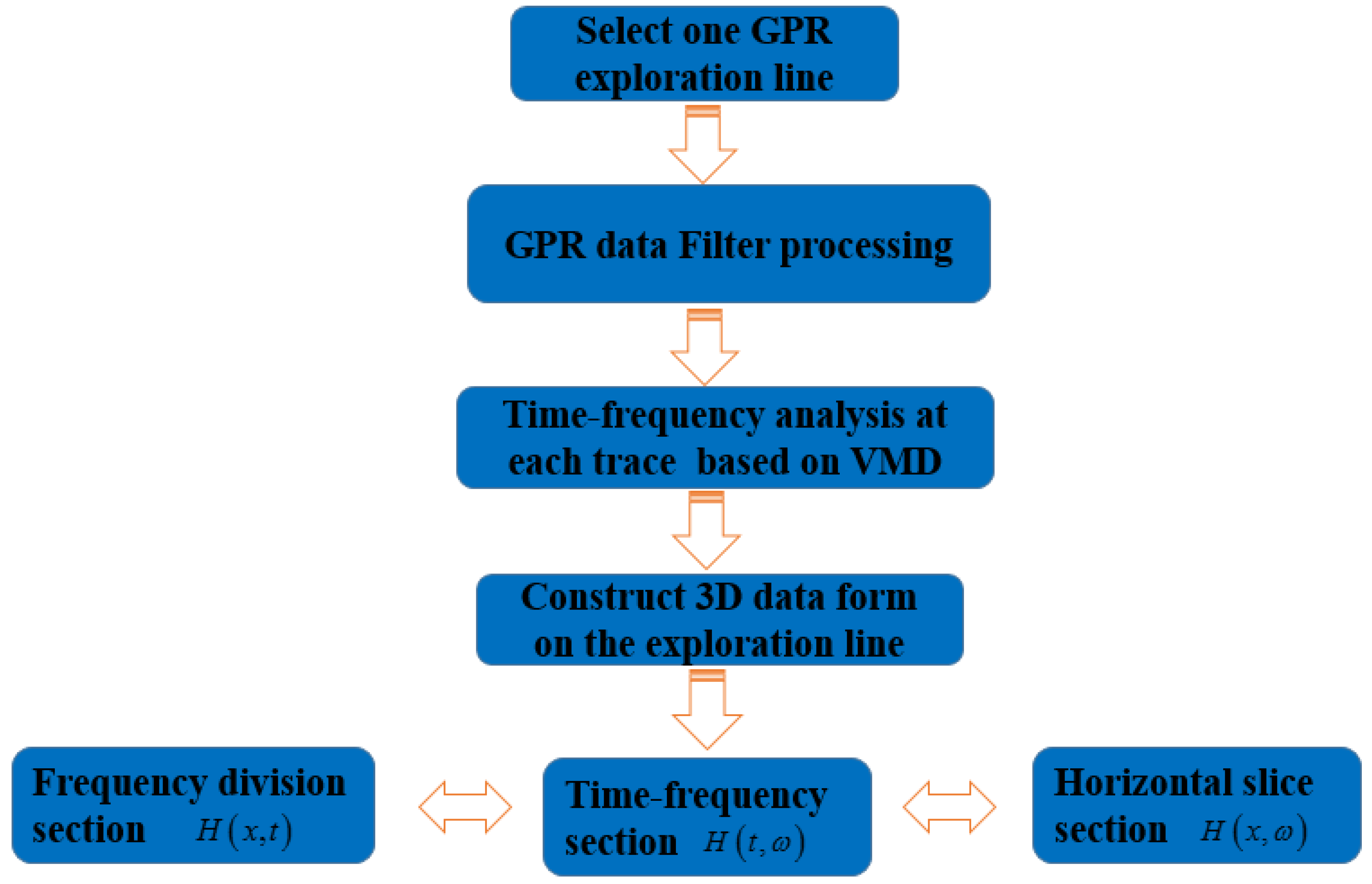
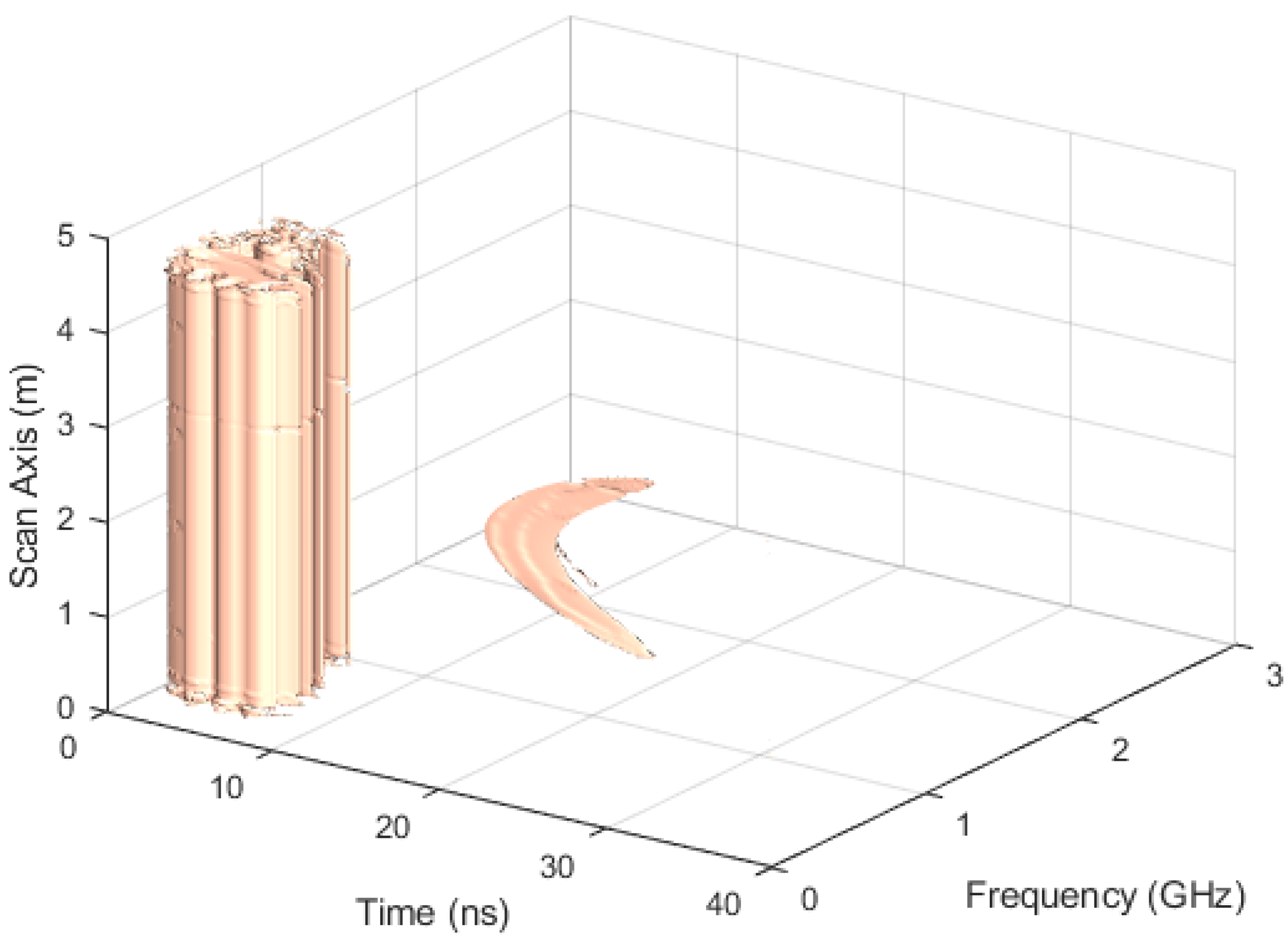
- The time-frequency spectrum of the GPR signal can be obtained using VMD. The slice section of the 3D time-frequency data body that was constructed from the GPR scan line data displays the information of the detection target from multiple angles.
- (3)
- VMD separates the IMF of the GPR signal and has obvious advantages when compared to the traditional method EMD and EEMD.
- (4)
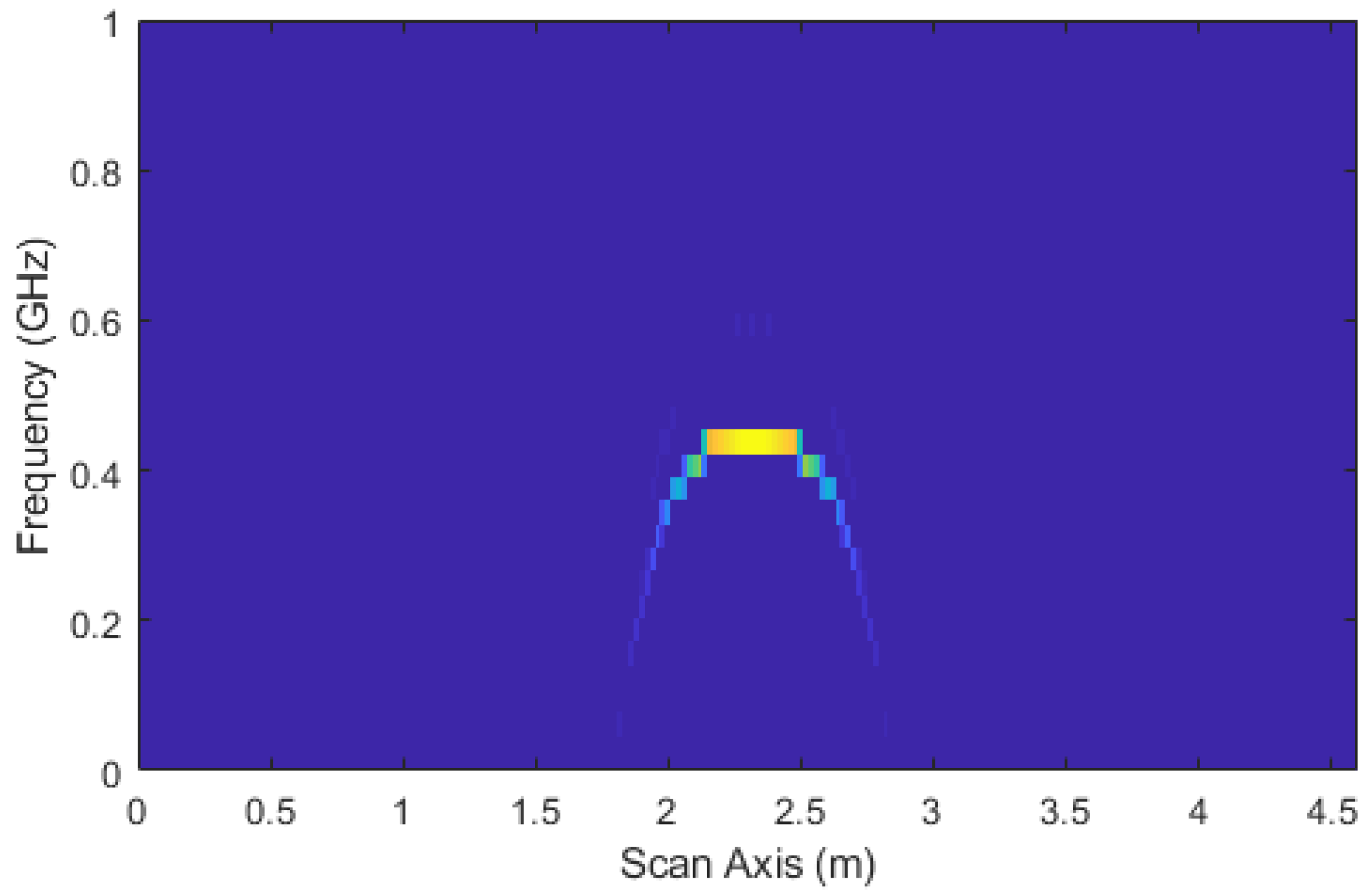
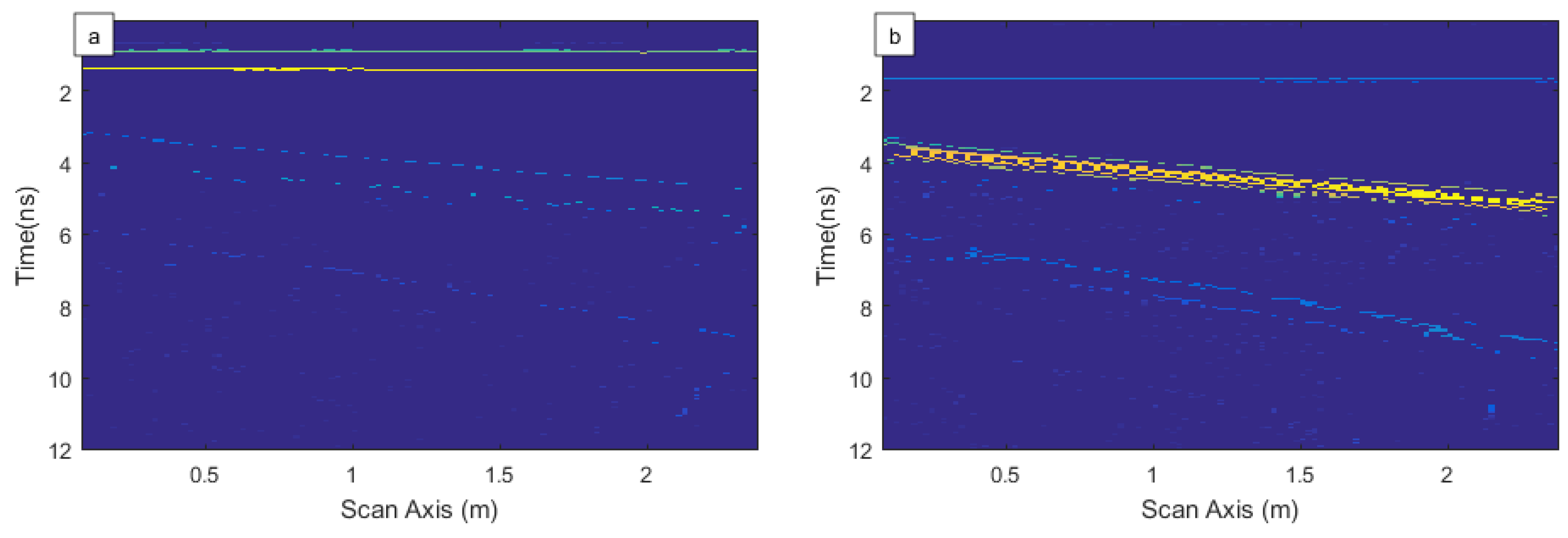
- According to the time-frequency spectrum of the GPR signal based on VMD, the processing method can highlight the abnormal areas and it shows good applicability in the discovery of the cavern anomalies.
Author Contributions
Funding
Conflicts of Interest
References
- Zoubir, A.M.; Chant, I.J.; Brown, C.L.; Barkat, B.; Abeynayake, C. Signal processing techniques for landmine detection using impulse ground penetrating radar. IEEE Sens. J. 2002, 2, 41–51. [Google Scholar] [CrossRef] [Green Version]
- Maida, A.; Pennock, S.; Shepherd, P. Improving ground penetrating radar signal analysis through FFT superimposition. In Proceedings of the 2005 IEEE Antennas and Propagation Society International Symposium, Washington, DC, USA, 3–8 July 2005; pp. 118–121. [Google Scholar]
- Lai, W.L.; Kind, T.; Wiggenhauser, H. Using ground penetrating radar and time–frequency analysis to characterize construction materials. NDT E Int. 2011, 44, 111–120. [Google Scholar] [CrossRef]
- Szymczyk, P.; Szymczyk, M. Non-destructive building investigation through analysis of GPR signal by S-transform. Autom. Constr. 2015, 55, 35–46. [Google Scholar] [CrossRef]
- Zeng, Z.; Wu, F.; Huang, L.; Liu, F.; Sun, J. The adaptive chirplet transform and its application in GPR target detection. Appl. Geophys. 2009, 6, 192–200. [Google Scholar] [CrossRef]
- Zhang, Y.; Candra, P.; Wang, G.; Xia, T. 2-D entropy and short-time Fourier transform to leverage GPR data analysis efficiency. IEEE Trans. Instrum. Meas. 2015, 64, 103–111. [Google Scholar] [CrossRef]
- Rial, F.I.; Lorenzo, H.; Pereira, M.; Armesto, J. Analysis of the emitted wavelet of high-resolution bowtie GPR Antennas. Sensors 2009, 9, 4230–4246. [Google Scholar] [CrossRef]
- Economou, N. Time-varying band-pass filtering GPR data by self-inverse filtering. Near Surf. Geophys. 2016, 14, 207–217. [Google Scholar]
- Ouadfeul, S.; Aliouane, L. Multiscale analysis of 3D GPR data using the continuous wavelet transform. In Proceedings of the 13th International Conference on Ground Penetrating Radar (GPR), Lecce, Italy, 21–25 June 2010; pp. 1–4. [Google Scholar]
- Chen, Y.; Yu, S.; Kao, S. Measurement of Stream Cross-Sectional Area Using Ground Penetration Radar with Empirical Mode Decomposition. In Proceedings of the AGU Fall Meeting, San Francisco, CA, USA, 5–9 December 2011. [Google Scholar]
- Qiufen, Y. The instantaneous frequency analysis of GPR data using empirical mode decomposition. Coal Geol. Explor. 2009, 4, 22. [Google Scholar]
- Battista, B.M.; Addison, A.D.; Knapp, C.C. Empirical mode decomposition operator for dewowing GPR data. J. Environ. Eng. Geophys. 2009, 14, 163–169. [Google Scholar] [CrossRef]
- Lv, C.; Zhao, J.; Wu, C.; Guo, T.; Chen, H. Optimization of the End Effect of Hilbert-Huang transform (HHT). Chin. J. Mech. Eng. 2017, 30, 732–745. [Google Scholar] [CrossRef]
- Huang, N.; Chen, H.; Cai, G.; Fang, L.; Wang, Y. Mechanical fault diagnosis of high voltage circuit breakers based on variational mode decomposition and multi-layer classifier. Sensors 2016, 16, 1887. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, M.; Yu, Q.; Zhang, H. Comparing the applications of EMD and EEMD on time–frequency analysis of seismic signal. J. Appl. Geophys. 2012, 83, 29–34. [Google Scholar] [CrossRef]
- Gilles, J. Empirical wavelet transform. IEEE Trans. Signal Process. 2013, 61, 3999–4010. [Google Scholar] [CrossRef]
- Lei, Y.; He, Z.; Zi, Y. EEMD method and WNN for fault diagnosis of locomotive roller bearings. Expert Syst. Appl. 2011, 38, 7334–7341. [Google Scholar] [CrossRef]
- Torres, M.E.; Colominas, M.A.; Schlotthauer, G.; Flandrin, P. A complete ensemble empirical mode decomposition with adaptive noise. In Proceedings of the 2011 IEEE international conference on acoustics, speech and signal processing (ICASSP), Prague, Czech Republic, 22–27 May 2011; pp. 4144–4147. [Google Scholar]
- Chen, C.; Jeng, Y. Natural logarithm transformed EEMD instantaneous attributes of reflection data. J. Appl. Geophys. 2013, 95, 53–65. [Google Scholar] [CrossRef]
- Li, J.; Liu, C.; Zeng, Z.; Chen, L. GPR signal denoising and target extraction with the CEEMD method. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1615–1619. [Google Scholar]
- Manataki, M.; Sarris, A.; Vafidis, A. Employing CEEMD for Improving GPR Images-A Case Study from a Neolithic Settlement in Thessaly, Greece. In Proceedings of the 8th Congress of the Balkan Geophysical Society, Chania, Greece, 5–8 October 2015. [Google Scholar]
- Juncai, X.; Liqiao, L.; Qingwen, R. EEMD analysis of GPR signal in time domain. J. Hefei Univ. Technol. (Nat. Sci.) 2015, 38, 639–642. [Google Scholar]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Mohanty, S.; Gupta, K.K.; Raju, K.S. Comparative study between VMD and EMD in bearing fault diagnosis. In Proceedings of the 2014 9th International Conference on Industrial and Information Systems (ICIIS), Gwalior, India, 15–17 December 2014; pp. 1–6. [Google Scholar]
- An, X.; Zeng, H. Pressure fluctuation signal analysis of a hydraulic turbine based on variational mode decomposition. Proc. Inst. Mech. Eng. Part A J. Power Energy 2015, 229, 978–991. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, G.; Li, M.; Yin, H. Variational mode decomposition denoising combined the detrended fluctuation analysis. Signal Process. 2016, 125, 349–364. [Google Scholar] [CrossRef]
- Wang, Y.; Markert, R.; Xiang, J.; Zheng, W. Research on variational mode decomposition and its application in detecting rub-impact fault of the rotor system. Mech. Syst. Signal Process. 2015, 60, 243–251. [Google Scholar] [CrossRef]
- Juncai, X.; Qingwen, R.; Linping, H. GPR signal analysis method based on variational mode decomposition. J. Hohai Univ. (Nat. Sci.) 2018, 46, 545–550. [Google Scholar]
- Liu, W.; Cao, S.; Wang, Z. Application of variational mode decomposition to seismic random noise reduction. J. Geophys. Eng. 2017, 14, 888–899. [Google Scholar] [CrossRef]
- Xue, Y.; Cao, J.; Wang, D.; Du, H.; Yao, Y. Application of the variational-mode decomposition for seismic time–frequency analysis. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3821–3831. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ξ | ||
|---|---|---|
| EMD | EEMD | VMD |
| 0.065 | 0.0125 | 0.0119 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Lei, B. Data Interpretation Technology of GPR Survey Based on Variational Mode Decomposition. Appl. Sci. 2019, 9, 2017. https://doi.org/10.3390/app9102017
Xu J, Lei B. Data Interpretation Technology of GPR Survey Based on Variational Mode Decomposition. Applied Sciences. 2019; 9(10):2017. https://doi.org/10.3390/app9102017
Chicago/Turabian StyleXu, Juncai, and Bangjun Lei. 2019. "Data Interpretation Technology of GPR Survey Based on Variational Mode Decomposition" Applied Sciences 9, no. 10: 2017. https://doi.org/10.3390/app9102017
APA StyleXu, J., & Lei, B. (2019). Data Interpretation Technology of GPR Survey Based on Variational Mode Decomposition. Applied Sciences, 9(10), 2017. https://doi.org/10.3390/app9102017