Vibration Control of an Aero Pipeline System with Active Constraint Layer Damping Treatment

Abstract
:
1. Introduction
2. Materials and Methods
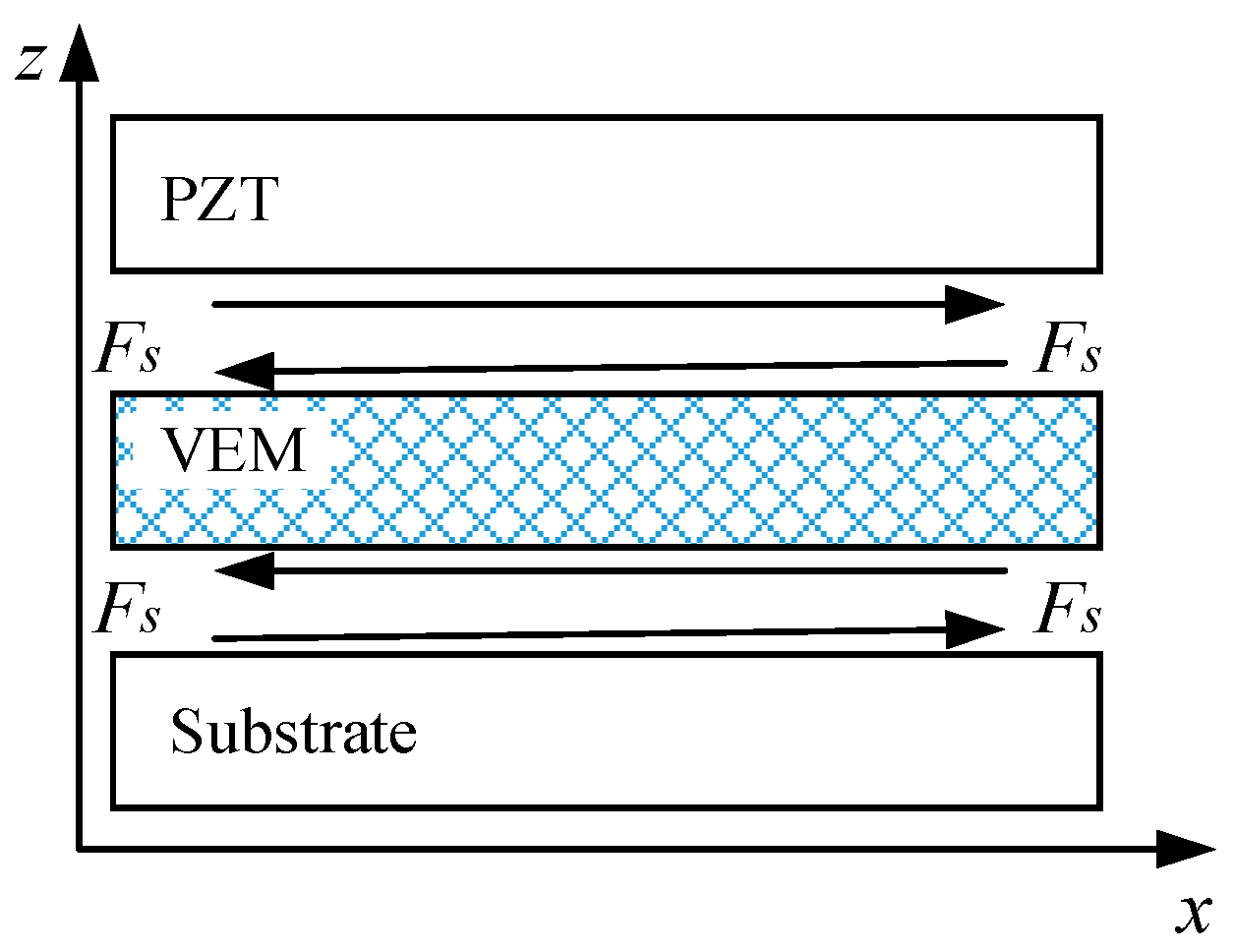
2.1. Theoretical Modeling of Active Constraint Layer Damping
2.2. Transform of Piezoelectric Parameters Matrix
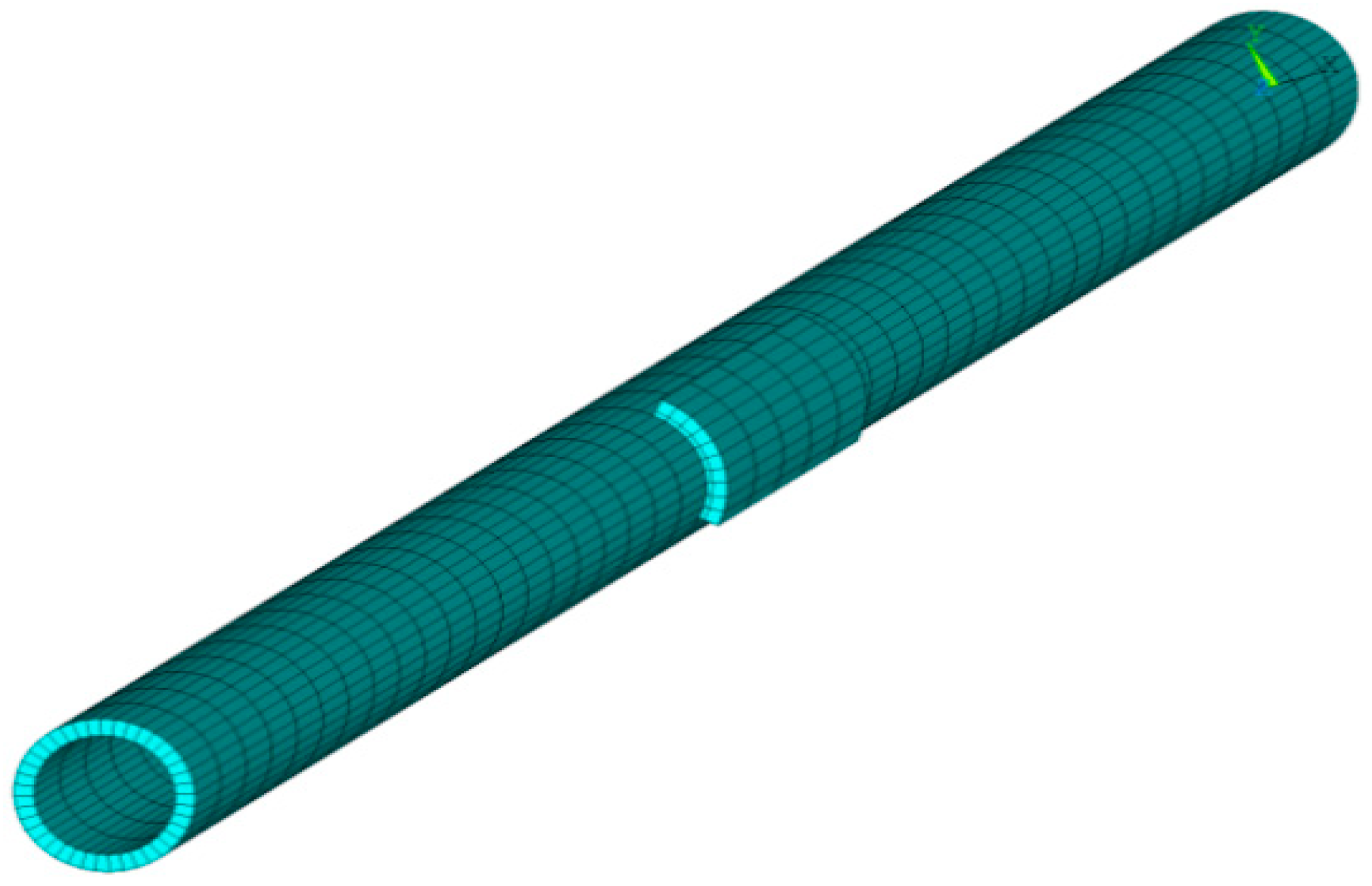
2.3. FEM Model of ACLD Patches
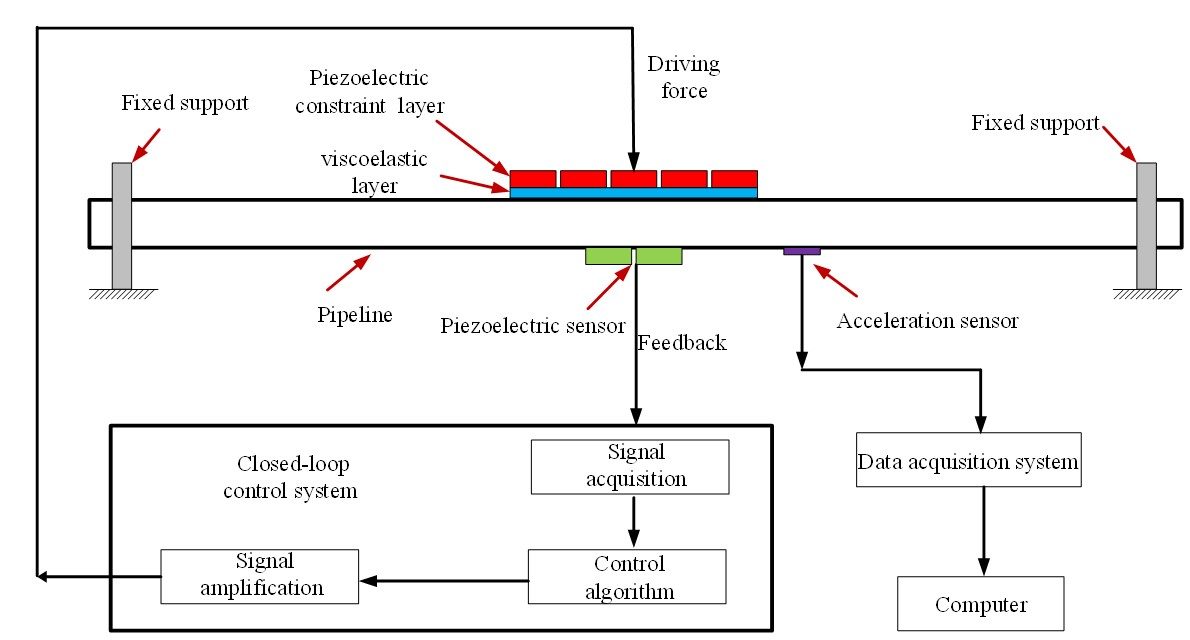
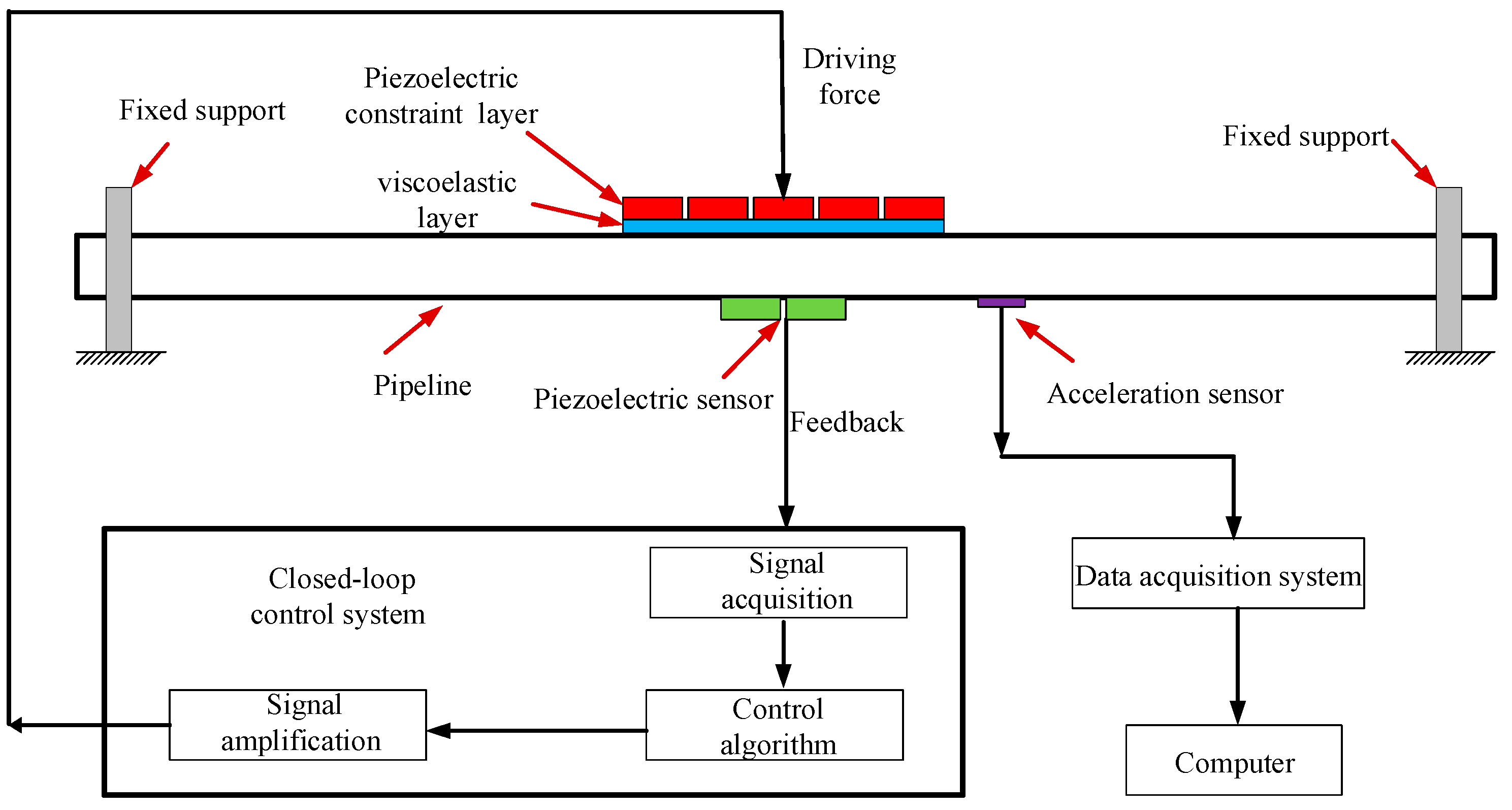
2.4. Experimental Validation of Active Constraint Layer Damping Treatment
- Vibrostand: Provide a sinusoidal excitation for the pipeline. Output excitation frequency range: 5 to 5000 Hz.
- Sensors: The sensors used in this paper include acceleration sensors and piezoelectric ceramic sensors.
- Signal collector: (1) The voltage acquisition and output module comprise 16 voltage input channels and 2 output channels, wherein the input channel is used for feedback vibration response of the pipeline, the output channel is used for outputting control signals through the controller; (2) The acceleration acquisition module has 8 acceleration input channels to monitor the vibration of the pipeline.
- Controller: The controller is used as a lower computer to run the control program. The input vibration signal is computed to obtain the control voltage signal. The controller is a National Instruments PXI controller.
- Voltage amplifier: Amplify the control voltage signal outputted by the controller. The voltage amplification factor can be up to 15 times. The voltage signal input range is 0–10 V, and the no-load full-scale bandwidth is 1000 Hz.
3. Results and Discussion
3.1. Influences on Shear Force Transmitted by Active Constraint Layer Damping
3.2. Results of the FEM-Based Damping Characteristics Analysis
3.3. Results of the FEM-Based Control Parameters Analysis
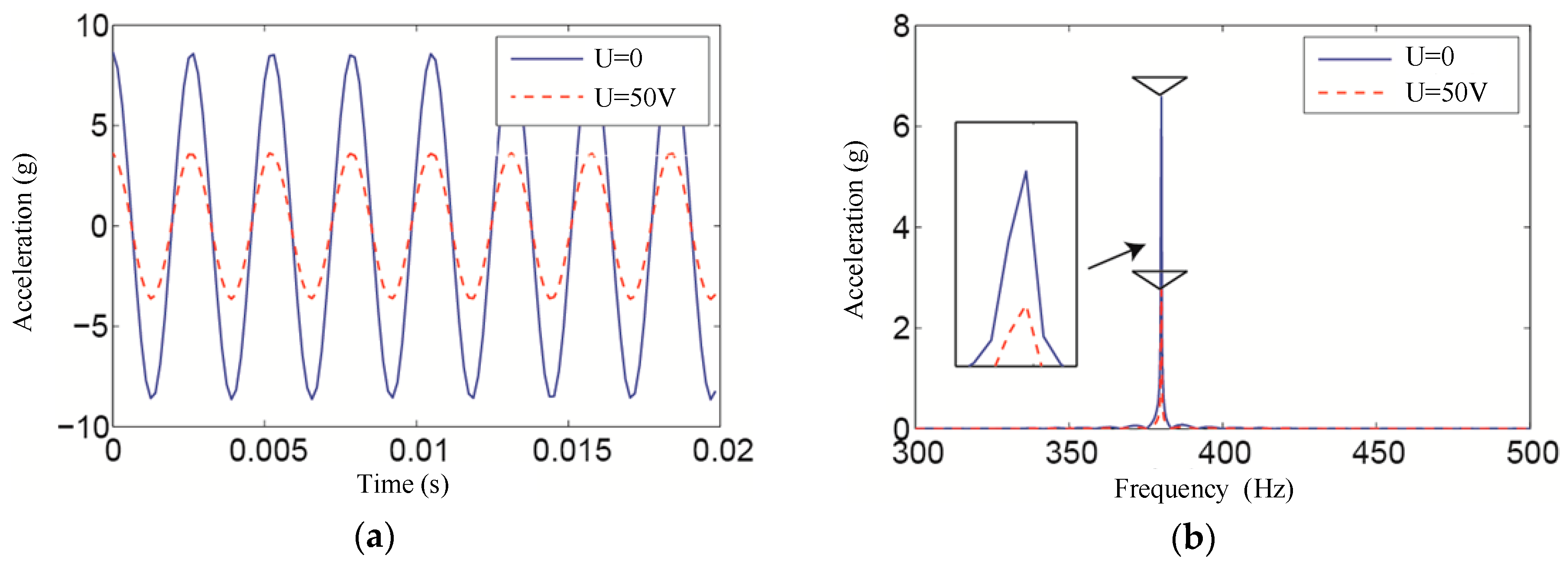
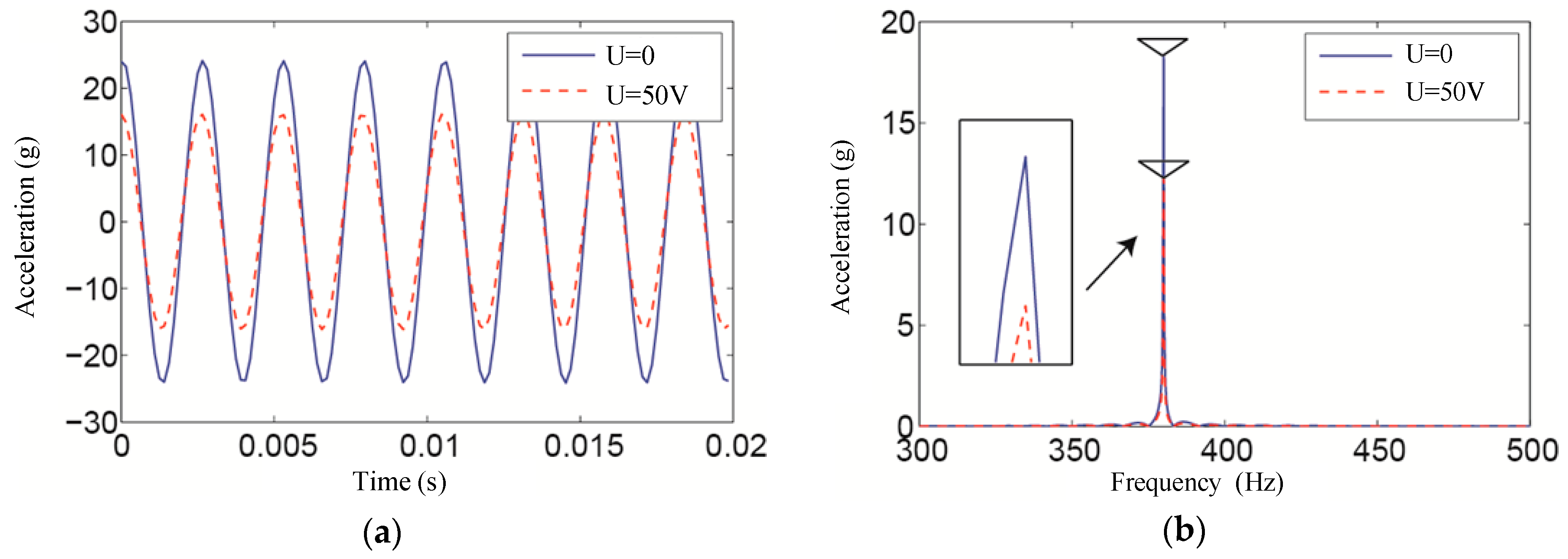
3.4. Measurement of Vibration Response under Different Excitations
4. Conclusions
- (1)
- The force analysis of the pipeline with ACLD patches under the harmonic voltage shows that the driving force is correlated with the piezoelectric constant of the active constraint layer, the control voltage, the shear modulus and thickness of the viscoelastic layer. The driving force transmitted by the viscoelastic layer increases as the shear modulus increases or the thickness decreases, but the modal loss factor of the system exhibits a peak when the shear modulus reaches or the thickness reaches 0.75 mm for the VEM used in this research. Therefore, the optimal viscoelastic layer shear modulus and thickness can be selected to obtain the best performance of ACLD treatment.
- (2)
- Through the finite element analysis and experiment, the effectiveness of the ACLD patches for the vibration control of the pipeline is verified, and the damping effect reaches up to the highest being 58.14% when the amplitude of excitations is 0.1 g and decline with the growth of the excitation amplitude. The structure parameters and control parameters of the ACLD patches have a significant influence on the damping performance. The damping effect increases with the increase of the control voltage and coverage area.
- (3)
- Under the given excitation, it is effective to increase the coverage area of the ACLD patches and improve the amplitude of the control voltage to get a better vibration control effect. However, as the voltage increases, the acceleration response that can be reduced per unit voltage becomes smaller under the same excitation. Also, as the amplitude of the excitation increases, the control effect under the same voltage is gradually reduced. That is, under certain conditions, the effect of ACLD patches on vibration control is limited.
- (1)
- Due to limited time and energy, there is a lack of more in-depth research on research issues, and some theoretical and applied issues need further analysis. For example, the effects of pulsating pressure on vibration in actual conditions are not considered in the paper during the modeling and experimentation steps.
- (2)
- In the ACLD structure, the constitutive relationship of viscoelastic materials is greatly affected by the ambient temperature and vibration frequency. Therefore, the search for a reasonable description of the constitutive relationship of viscoelastic materials still needs to be studied.
- (3)
- The research on the control method of ACLD structure is still insufficient. The PID control currently used is too simple. Therefore, it is necessary to develop and study more suitable control methods, especially robust control, adaptive control and intelligent control, to overcome and solve the uncertainty and change affecting the model.
Author Contributions
Funding
Conflicts of Interest
References
- Yu, D.; Païdoussis Michael, P.; Shen, H.; Wang, L. Dynamic stability of periodic pipes conveying fluid. J. Appl. Mech. 2014, 81, 8–11. [Google Scholar] [CrossRef]
- Liu, G.; Li, S.; Li, Y.; Chen, H. Vibration analysis of pipelines with arbitrary branches by absorbing transfer matrix method. J. Sound Vib. 2013, 332, 6519–6536. [Google Scholar] [CrossRef]
- Shen, H.; Wen, J.; Yu, D.; Wen, X. The vibrational properties of a periodic composite pipe in 3D space. J. Sound Vib. 2009, 328, 57–70. [Google Scholar] [CrossRef]
- Xu, Y.; Jiao, Z. Exact solution of axial liquid-pipe vibration with time-line interpolation. J. Fluids Struct. 2017, 70, 500–518. [Google Scholar] [CrossRef]
- Liu, W.; Liu, Y.; Yue, Z. Dynamic reliability of aircraft hydraulic pipelines under random pressure pulsation and vibration. Multidiscip. Model. Mater. Struct. 2010, 6, 493–507. [Google Scholar] [CrossRef]
- Lee, S.-H.; Jeong, W.-B. An efficient method to predict steady-state vibration of three-dimensional piping system conveying a pulsating fluid. J. Mech. Sci. Technol. 2012, 26, 2659–2667. [Google Scholar] [CrossRef]
- Sorokin, S.; Holst-Jensen, O. On Power Flow Suppression in Straight Elastic Pipes by Use of Equally Spaced Eccentric Inertial Attachments. J. Vib. Acoust. 2012, 134, 041003. [Google Scholar] [CrossRef]
- Tan, J.; Ho, S.M.; Zhang, P.; Jiang, J. Experimental Study on Vibration Control of Suspended Piping System by Single-Sided Pounding Tuned Mass Damper. Appl. Sci. 2019, 9, 285. [Google Scholar] [CrossRef]
- Tan, J.; Jiang, J.; Liu, M.; Feng, Q.; Zhang, P.; Ho, S.C.M. Implementation of Shape Memory Alloy Sponge as Energy Dissipating Material on Pounding Tuned Mass Damper: An Experimental Investigation. Appl. Sci. 2019, 9, 1079. [Google Scholar] [CrossRef]
- Zhang, P.; Patil, D.; Ho, S.C.M. Effect of Seawater Exposure on Impact Damping Behavior of Viscoelastic Material of Pounding Tuned Mass Damper (PTMD). Appl. Sci. 2019, 9, 632. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, Z.; Gao, H.; Wang, H. Development of a self-powered magnetorheological damper system for cable vibration control. Appl. Sci. 2018, 8, 118. [Google Scholar] [CrossRef]
- Baz, A.M. Optimization of energy dissipation characteristics of active constrained layer damping. Smart Mater. Struct. 1997, 6, 360. [Google Scholar] [CrossRef]
- Tliba, S.; Abou-Kandil, H.; Prieur, C. Active vibration damping of a smart flexible structure using piezoelectric transducers: H_infinity design and experimental results. IFAC Proc. Vol. 2005, 38, 760–765. [Google Scholar] [CrossRef]
- Luo, Y.; Zhang, X.; Zhang, Y.; Qu, Y.; Xu, M.; Fu, K.; Ye, L. Active vibration control of a hoop truss structure with piezoelectric bending actuators based on a fuzzy logic algorithm. Smart Mater. Struct. 2018, 27, 085030. [Google Scholar]
- Yang, Q.; Lee, K.; Kim, B. Development of Multi-Staged Adaptive Filtering Algorithm for Periodic Structure-Based Active Vibration Control System. Appl. Sci. 2019, 9, 611. [Google Scholar] [CrossRef]
- Trikande, M.W.; Karve, N.K.; Raj, R.A.; Jagirdar, V.V.; Vasudevan, R. Semi-active vibration control of an 8x8 armored wheeled platform. J. Vib. Control 2018, 24, 283–302. [Google Scholar] [CrossRef]
- Owen, T.; Massimo, R.; Amr, B. Attenuation of wave propagation in fluid-loaded shells with periodic shunted piezoelectric rings. Smart Mater. Struct. 2005, 14, 594–604. [Google Scholar]
- El Harti, K.; Rahmoune, M.; Sanbi, M.; Saadani, R.; Bentaleb, M.; Rahmoune, M. Finite Element Model of Vibration Control for an Exponential Functionally Graded Timoshenko Beam with Distributed Piezoelectric Sensor/Actuator. Actuators 2019, 8, 19. [Google Scholar] [CrossRef]
- Herold, S.; Mayer, D. Adaptive Piezoelectric Absorber for Active Vibration Control. Actuators 2016, 5, 7. [Google Scholar] [CrossRef]
- Khan, A.; Kim, H.S. Active Vibration Control of a Piezo-Bonded Laminated Composite in the Presence of Sensor Partial Debonding and Structural Delaminations. Sensors 2019, 19, 540. [Google Scholar] [CrossRef]
- Her, S.-C.; Lin, C.-S. Vibration Analysis of Composite Laminate Plate Excited by Piezoelectric Actuators. Sensors 2013, 13, 2997–3013. [Google Scholar] [CrossRef] [Green Version]
- Zhong, B.; Deng, B.; Zhao, H. Simulation Model and Method for Active Torsional Vibration Control of an HEV. Appl. Sci. 2019, 9, 34. [Google Scholar] [CrossRef]
- Byungjun, K.; Emiliano, R.; Timothy, W.; Brian, M. Vibration control of beams and plates with hybrid active-passive constrained layer damping treatments. In Proceedings of the International Congress of Sound & Vibration, Athens, Greece, 10–14 July 2016. [Google Scholar]
- Kumar, N.; Singh, S.P. Vibration and damping characteristics of beams with active constrained layer treatments under parametric variations. Mater. Des. 2009, 30, 4162–4174. [Google Scholar] [CrossRef]
- Ray, M.C.; Reddy, J.N. Active damping of laminated cylindrical shells conveying fluid using 1-3 piezoelectric composites. Compos. Struct. 2013, 98, 261–271. [Google Scholar] [CrossRef]
- Kattimani, S.C.; Ray, M.C. Vibration control of multiferroic fibrous composite plates using active constrained layer damping. Mech. Syst. Signal Process. 2018, 106, 334–354. [Google Scholar] [CrossRef]
- Kumar, R.S.; Ray, M.C. Active control of geometrically nonlinear vibrations of doubly curved smart sandwich shells using 1–3 piezoelectric composites. Compos. Struct. 2013, 105, 173–187. [Google Scholar] [CrossRef]
- Crawley, E.F.; Luis, J.D. Use of piezoelectric actuator as elements of intelligent structures. AIAA J. 1987, 25, 1373–1385. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| External Diameter (mm) | Thickness (mm) | Length (mm) | Radian (rad) | |
|---|---|---|---|---|
| Pipeline | 18 | 1.5 | 500 | |
| Viscoelastic layer | 18.52 | 0.26 | 100 | |
| Active constraint layer | 20.52 | 1 | 100 |
| Material | Elasticity Modulus (Pa) | Poisson’s Ratio ν | Density (kg/m3) |
|---|---|---|---|
| Pipeline | 0.3 | ||
| Viscoelastic layer | 0.499 | 980 | |
| Active constraint layer | —— | 0.3 | 7400 |
| Piezoelectric Strain Constant | Elastic Constant | Relative Dielectric Constant | |||||
|---|---|---|---|---|---|---|---|
| d31 | d33 | d15 | |||||
| Active constraint layer | 186 | 420 | 660 | 15 | 5.3 | 25 | 2200 |
| Order of the Modals | First | Second | Third |
|---|---|---|---|
| Natural frequency (Hz) | 375.8 | 1049.2 | 1967.3 |
| Mode of vibration | Bending | Bending | Bending |
| Control Voltages | Amplitude of Acceleration (g) | Droop Rate (%) | Droop in Per Unit Voltage (g/10 V) |
|---|---|---|---|
| 0 V | 29.8 | 0 | NA |
| 10 V | 26.08 | 12.65 | 3.77 |
| 20 V | 22.42 | 24.77 | 3.61 |
| 30 V | 19.07 | 36.00 | 3.35 |
| 40 V | 16.12 | 45.90 | 2.95 |
| 50 V | 13.85 | 53.52 | 2.27 |
| Amplitude of Excitations (g) | Amplitude of Acceleration Before Vibration Control (g) | Acceleration Amplitude After Vibration Control (g) | Droop Rate |
|---|---|---|---|
| 0.1 | 6.581 | 2.755 | 58.14% |
| 0.2 | 13.26 | 7.514 | 37.18% |
| 0.3 | 18.38 | 12.28 | 33.19% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhai, J.; Li, J.; Wei, D.; Gao, P.; Yan, Y.; Han, Q. Vibration Control of an Aero Pipeline System with Active Constraint Layer Damping Treatment. Appl. Sci. 2019, 9, 2094. https://doi.org/10.3390/app9102094
Zhai J, Li J, Wei D, Gao P, Yan Y, Han Q. Vibration Control of an Aero Pipeline System with Active Constraint Layer Damping Treatment. Applied Sciences. 2019; 9(10):2094. https://doi.org/10.3390/app9102094
Chicago/Turabian StyleZhai, Jingyu, Jiwu Li, Daitong Wei, Peixin Gao, Yangyang Yan, and Qingkai Han. 2019. "Vibration Control of an Aero Pipeline System with Active Constraint Layer Damping Treatment" Applied Sciences 9, no. 10: 2094. https://doi.org/10.3390/app9102094
APA StyleZhai, J., Li, J., Wei, D., Gao, P., Yan, Y., & Han, Q. (2019). Vibration Control of an Aero Pipeline System with Active Constraint Layer Damping Treatment. Applied Sciences, 9(10), 2094. https://doi.org/10.3390/app9102094