Equivalent Circuit Parameter Calculations and Characteristics Analysis of 2-DoF Direct Drive Induction Motor with a Slotted Solid Rotor


Abstract
:1. Introductions
2. Structure and Parameters
3. Equivalent Circuit Parameters Calculation (Rotary Part)
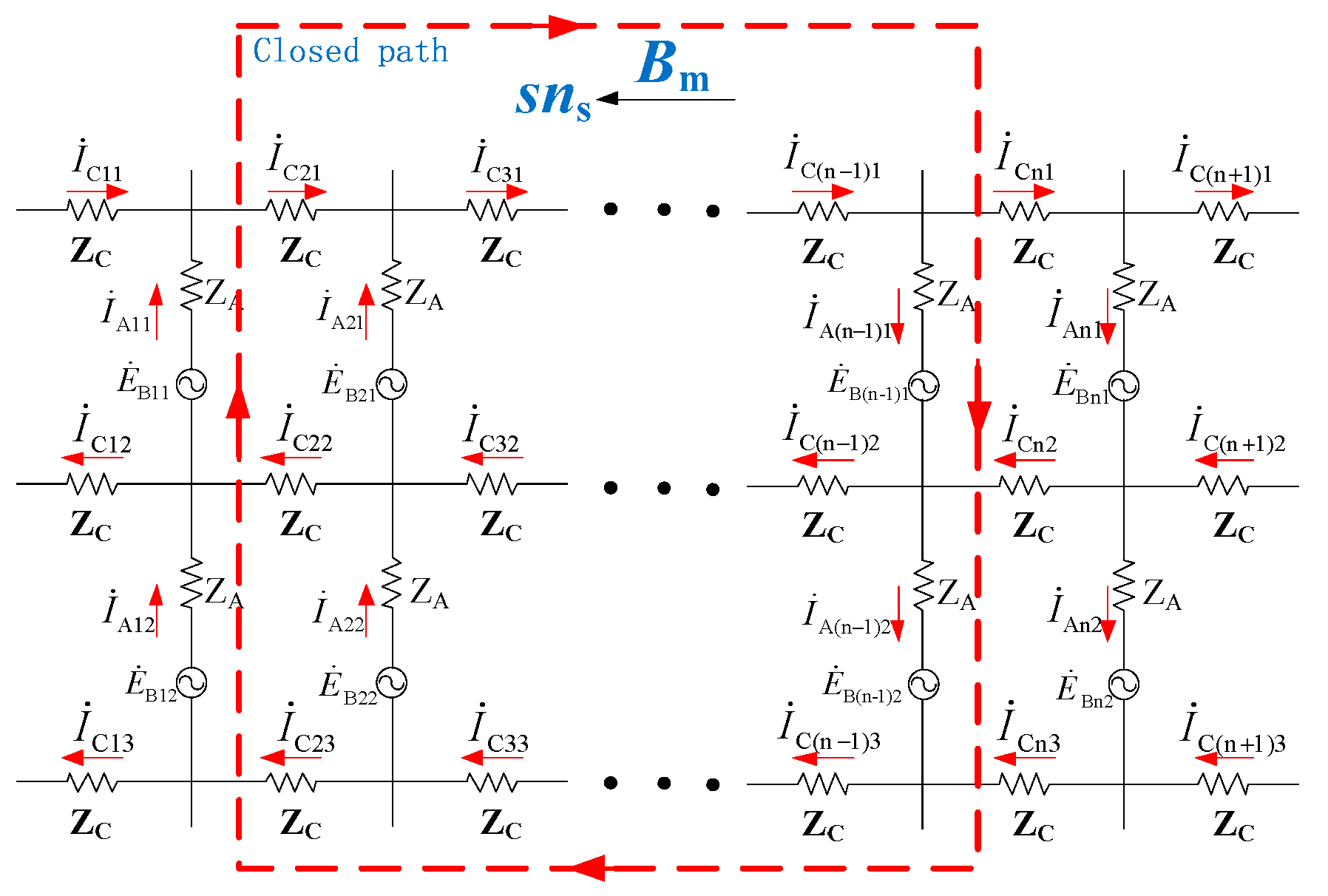
3.1. Circuit Diagram and Currents Distribution in SSR
3.2. Equivalent Circuit
3.3. Rotor Parameters Calculation
- (1)
- The motor is supplied with balanced three-phase sinusoidal currents. The air gap flux density is constant in the axial direction.
- (2)
- The material primary core is isotropic, the permeability is infinite, and the conductivity is equal to zero.
- (3)
- The hysteresis, end, and saturation effects are ignored. The magnetic leakage in the rotor slots is neglected.
- (4)
- Each field includes a fundamental component, and the time curves of each field are sinusoidal.
3.4. Excitation Reactance Calculation
3.5. Equivalent Circuit Establishment
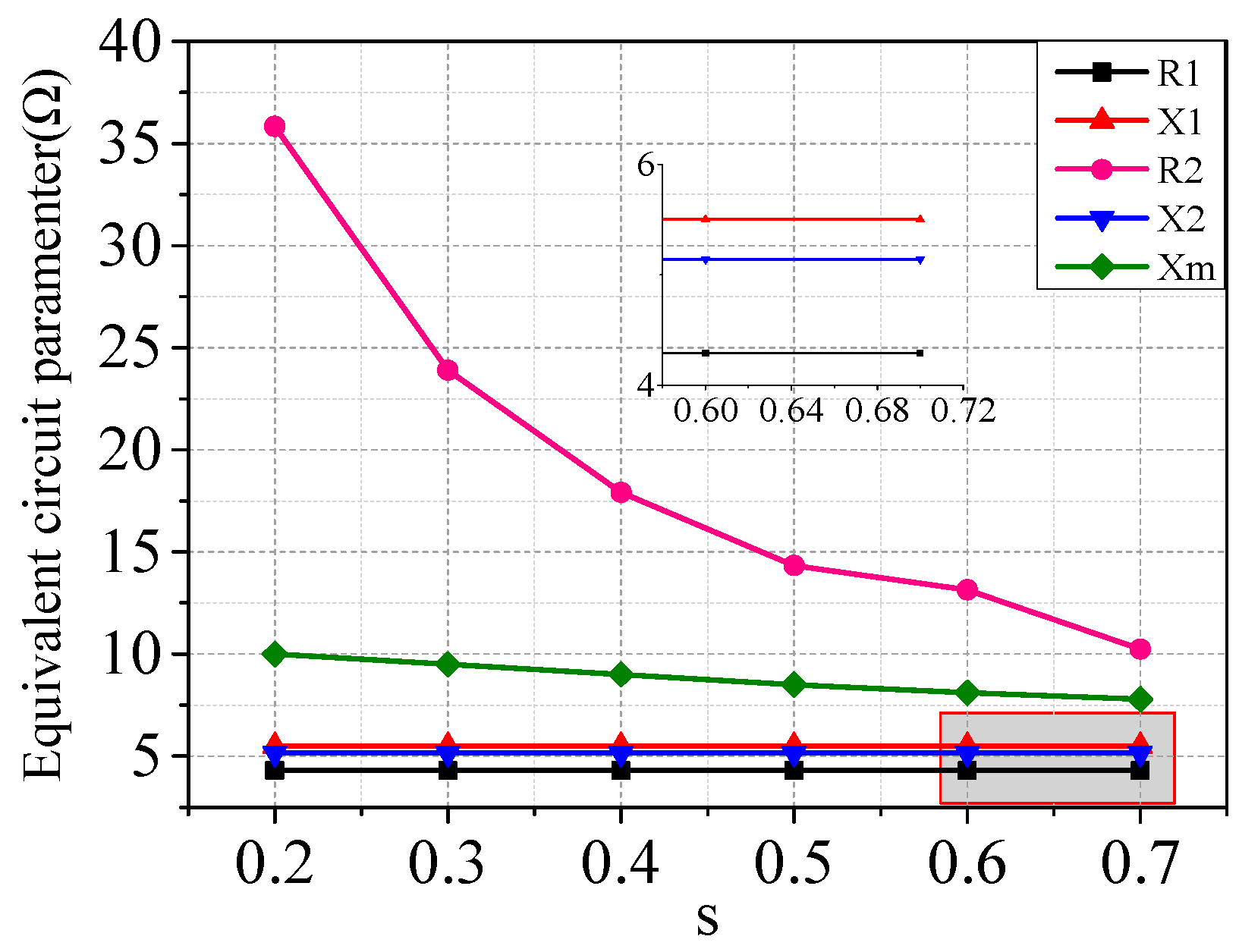
3.6. Equivalent Circuit Parameter Calculation Results
4. 3D Finite Element Analysis (Rotary Part)
5. Results Comparison and Characteristics Analysis
5.1. The Rotary Part
- (1)
- Stator phase current:
- (2)
- Torque:
- (3)
- Efficiency:
- (4)
- Power factor:where , , and are stator, equivalent rotor, and excitation impedances, respectively; is the electromagnetic power and is the synchronous angular velocity.
5.2. The Linear Part
5.3. Error Analysis
- (1)
- (2)
- According to Figure 5 and Equations (15) and (17), each equivalent circuit parameter will affect the currents, leading to variation of the analytical results of torque and power factor. During the calculation of rotor parameters, the rotor core impedance is assumed to be infinite. Neglecting the influence of rotor core impedance causes the calculation result of equivalent rotor impedance to be larger than the actual value. Although the saturation effect is considered in the calculation of excitation reactance, the rotor core relative permeability is determined by experience and the excitation reactance is not accurate enough. Thus, there are errors between the analytical and simulation values of the torque and power factor, as shown in Figure 12b,d and Figure 13b,d.
- (3)
- The phenomenon that the calculation values of efficiency are bigger than the simulation values is caused by ignoring the influences of harmonic effect and rotor core in ECM.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Si, J.K.; Xie, L.J.; Hang, J.B. Mathematical Model of Two-Degree-of-Freedom Direct Drive Induction Motor Considering Coupling Effect. J. Electr. Eng. Technol. 2017, 12, 1227–1234. [Google Scholar] [CrossRef] [Green Version]
- Si, J.K.; Xie, L.J.; Cao, W.P. Performance analysis of the 2DoF direct drive induction motor applying composite multilayer method. IET Electr. Power Appl. 2017, 11, 524–531. [Google Scholar] [CrossRef] [Green Version]
- Si, J.K.; Feng, H.C.; Ai, L.W. Design and Analysis of a 2-DOF Split-Stator Induction Motor. IEEE Trans. Energy Convers. 2015, 30, 1200–1208. [Google Scholar] [CrossRef] [Green Version]
- Si, J.K.; Ai, L.W.; Xie, L.J. Analysis on Electro-Magnetic Field and Performance Calculation of 2-DOF Direct Drive Induction Motor. Trans. China Electrotech. Soc. 2015, 14, 153–160. [Google Scholar]
- Si, J.K.; Han, J.B.; Si, M. Optimization and characteristic analysis of 2-DOF direct drive induction motor. Electr. Mach. Control 2015, 19, 75–82. [Google Scholar]
- Ho, S.L.; Niu, S.X.; Fu, W.N. A Novel Solid-Rotor Induction Motor with Skewed Slits in Radial and Axial Directions and Its Performance Analysis Using Finite Element Method. IEEE Trans. Appl. Supercond. 2010, 20, 1089–1092. [Google Scholar] [CrossRef]
- Huang, Z.G.; Wang, S.M.; Sun, Y.G. Equivalent-circuit Parameter Calculations and Performance Analysis of Slit Solid Rotor Asynchronous Machines. Proc. CSEE 2017, 37, 1208–1215. [Google Scholar]
- Kluszczynski, K.; Szczygie, M. How to convert a factory-manufactured induction motor into rotary-linear motor Part 1 Constructional issues. In Proceedings of the 15th International Workshop on Research and Education in Mechatronics (REM), Elgouna, Egypt, 9–11 September 2014. [Google Scholar]
- Wang, P.X.; Si, J.K.; Feng, H.C. Mover design and characteristics analysis of 2DoFDDIM. IET Electr. Power Appl. 2018, 12, 373–378. [Google Scholar] [CrossRef]
- Tang, Y.M. Electric Machinery Fundamentals, 4th ed.; China Machine Press: Beijing, China, 2011. (In Chinese) [Google Scholar]
- Boglietti, A.; Cavagnino, A.; Lazzari, M. Computational Algorithms for Induction Motor Equivalent Circuit Parameter Determination—Part II: Skin Effect and Magnetizing Characteristics. IEEE Trans. Ind. Electron. 2011, 58, 3734–3740. [Google Scholar] [CrossRef]
- Boglietti, A.; Cavagnino, A.; Lazzari, M. Computational Algorithms for Induction-Motor Equivalent Circuit Parameter Determination—Part I: Resistances and Leakage Reactances. IEEE Trans. Ind. Electron. 2011, 58, 3723–3733. [Google Scholar] [CrossRef]
- Boglietti, A.; Cavagnino, A.; Lazzari, M. Algorithms for the computation of the induction motor equivalent circuit parameters—Part II. In Proceedings of the 2008 34th Annual Conference of IEEE Industrial Electronics, Orlando, FL, USA, 10–13 November 2008. [Google Scholar]
- Boglietti, A.; Cavagnino, A.; Lazzari, M. Algorithms for the computation of the induction motor equivalent circuit parameters—Part I. In Proceedings of the 2008 34th Annual Conference of IEEE Industrial Electronics, Orlando, FL, USA, 10–13 November 2008. [Google Scholar]
- Fu, F.L.; Tang, X.G. Asynchronous Motor Design Manual, 2nd ed.; China Machine Press: Beijing, China, 2006. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Values/Dimension | |
|---|---|---|
| Rotary Part | Linear Part | |
| Rated voltage U1 (V) | 180 | 180 |
| Supply frequency f1 (Hz) | 50 | 50 |
| Pole pair p | 2 | 2 |
| Stator inner diameter Dsi (mm) | 98 | 98 |
| Stator outer diameter Dso (mm) | 155 | 155 |
| Stator axial diameter lef (mm) | 156 | 156 |
| Air-gap thickness δ (mm) | 2 | 2 |
| Number of slots | 12 | 12 |
| Phase number | 3 | 3 |
| Number of slots per pole per phase | 2 | 2 |
| Number of turns per slot N | 90 | 90 |
| Winding diameter dw (mm) | 0.54 | 0.54 |
| Circumferential radian (°) | 180 | 140 |
| Items | Parameters |
|---|---|
| Rotor outer diameter Dro (mm) | 94 |
| Rotor axial length Lr (mm) | 600 |
| Slot width w (mm) | 2 |
| Slot depth d (mm) | 7 |
| Slot pitch L (mm) | 10.84 (axial) |
| 11.57 (circumferential) |
| Slip | Stator Phase Current (A) | Output Toque (Nm) | ||||
|---|---|---|---|---|---|---|
| s | FEM | Math | Error | FEM | Math | Error |
| 0.2 | 7.70 | 7.96 | 3.38% | 5.62 | 5.73 | 1.96% |
| 0.3 | 8.04 | 8.43 | 4.07% | 7.51 | 7.47 | 0.53% |
| 0.4 | 8.61 | 8.95 | 4.07% | 8.96 | 8.53 | 4.80% |
| 0.5 | 8.96 | 9.46 | 5.35% | 9.55 | 9.08 | 4.92% |
| 0.6 | 9.26 | 9.77 | 5.51% | 9.41 | 9.03 | 4.04% |
| 0.7 | 9.70 | 10.3 | 6.19% | 9.07 | 9.30 | 2.54% |
| Slip | Efficiency | Power factor | ||||
|---|---|---|---|---|---|---|
| s | FEM | Math | Error | FEM | Math | Error |
| 0.2 | 0.28 | 0.284 | 1.43% | 0.445 | 0.417 | 6.29% |
| 0.3 | 0.26 | 0.273 | 5.00% | 0.470 | 0.467 | 0.64% |
| 0.4 | 0.23 | 0.236 | 2.61% | 0.515 | 0.499 | 3.11% |
| 0.5 | 0.19 | 0.191 | 0.53% | 0.532 | 0.517 | 2.82% |
| 0.6 | 0.15 | 0.146 | 2.67% | 0.514 | 0.520 | 0.12% |
| 0.7 | 0.10 | 0.104 | 4.00% | 0.540 | 0.534 | 1.11% |
| Slip | Stator Phase Current (A) | Output Toque (N) | ||||
|---|---|---|---|---|---|---|
| s | FEM | Math | Error | FEM | Math | Error |
| 0.2 | 11.2 | 10.6 | 5.35% | 136 | 125.7 | 7.57% |
| 0.3 | 11.9 | 11.2 | 5.88% | 180 | 168.3 | 6.50% |
| 0.4 | 12.7 | 11.8 | 7.09% | 207 | 197.1 | 4.78% |
| 0.5 | 13.5 | 12.4 | 8.15% | 220 | 215.6 | 2.00% |
| 0.6 | 14.2 | 13.1 | 7.75% | 224 | 226.1 | 0.94% |
| 0.7 | 14.9 | 13.8 | 7.38% | 221 | 230.3 | 4.21% |
| Slip | Efficiency | Power Factor | ||||
|---|---|---|---|---|---|---|
| s | FEM | Math | Error | FEM | Math | Error |
| 0.2 | 0.219 | 0.232 | 5.94% | 0.383 | 0.395 | 2.53% |
| 0.3 | 0.229 | 0.230 | 0.44% | 0.442 | 0.441 | 0.23% |
| 0.4 | 0.192 | 0.200 | 4.17% | 0.474 | 0.475 | 0.21% |
| 0.5 | 0.156 | 0.164 | 5.13% | 0.480 | 0.499 | 3.96% |
| 0.6 | 0.122 | 0.126 | 3.28% | 0.503 | 0.517 | 2.78% |
| 0.7 | 0.085 | 0.090 | 5.88% | 0.511 | 0.529 | 3.52% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, H.; Si, J.; Wu, W.; Dong, L.; Cheng, Z. Equivalent Circuit Parameter Calculations and Characteristics Analysis of 2-DoF Direct Drive Induction Motor with a Slotted Solid Rotor. Appl. Sci. 2019, 9, 2191. https://doi.org/10.3390/app9112191
Feng H, Si J, Wu W, Dong L, Cheng Z. Equivalent Circuit Parameter Calculations and Characteristics Analysis of 2-DoF Direct Drive Induction Motor with a Slotted Solid Rotor. Applied Sciences. 2019; 9(11):2191. https://doi.org/10.3390/app9112191
Chicago/Turabian StyleFeng, Haichao, Jikai Si, Wei Wu, Lianghui Dong, and Zhiping Cheng. 2019. "Equivalent Circuit Parameter Calculations and Characteristics Analysis of 2-DoF Direct Drive Induction Motor with a Slotted Solid Rotor" Applied Sciences 9, no. 11: 2191. https://doi.org/10.3390/app9112191
APA StyleFeng, H., Si, J., Wu, W., Dong, L., & Cheng, Z. (2019). Equivalent Circuit Parameter Calculations and Characteristics Analysis of 2-DoF Direct Drive Induction Motor with a Slotted Solid Rotor. Applied Sciences, 9(11), 2191. https://doi.org/10.3390/app9112191