Autonomous Robotics for Identification and Management of Invasive Aquatic Plant Species


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Featured Application
Abstract
1. Introduction
1.1. Impact and Treatment of Aquatic Weeds
1.2. Image-Based Machine Learning: Application to Aquatic Weed Identification
1.3. Research Objective
2. Methods
2.1. Autonomous Boat Development
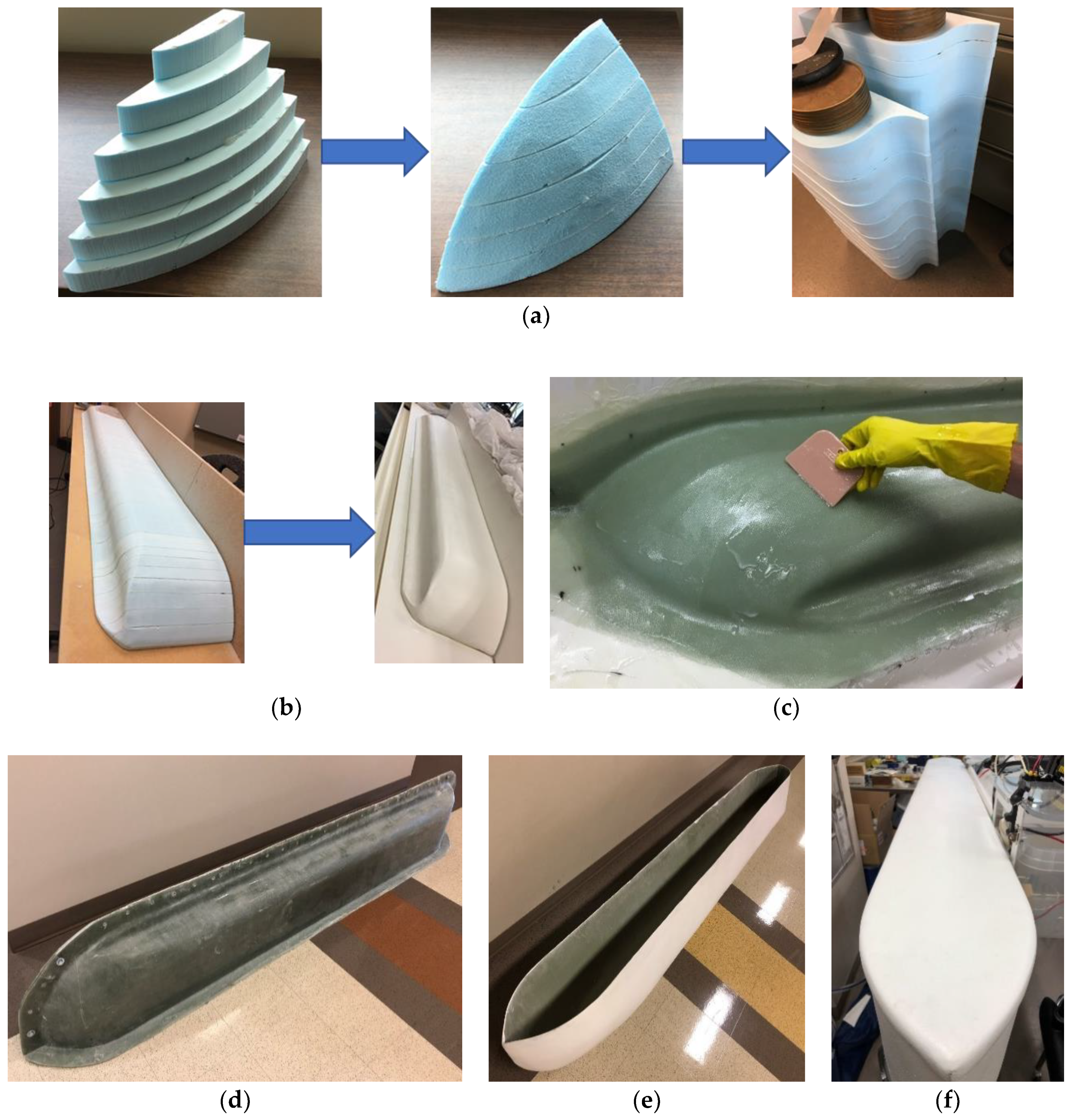
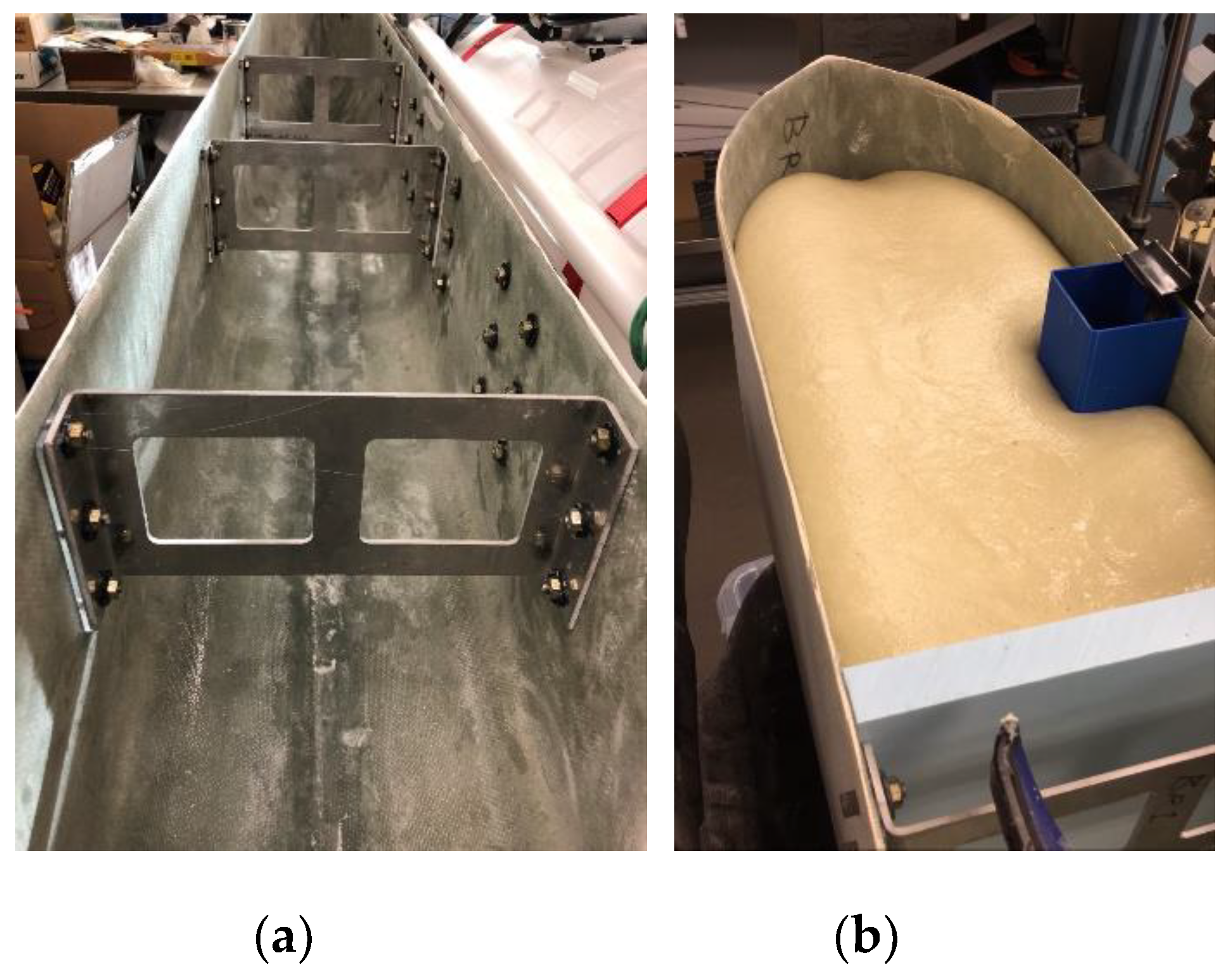
2.1.1. Hull Design and Fabrication
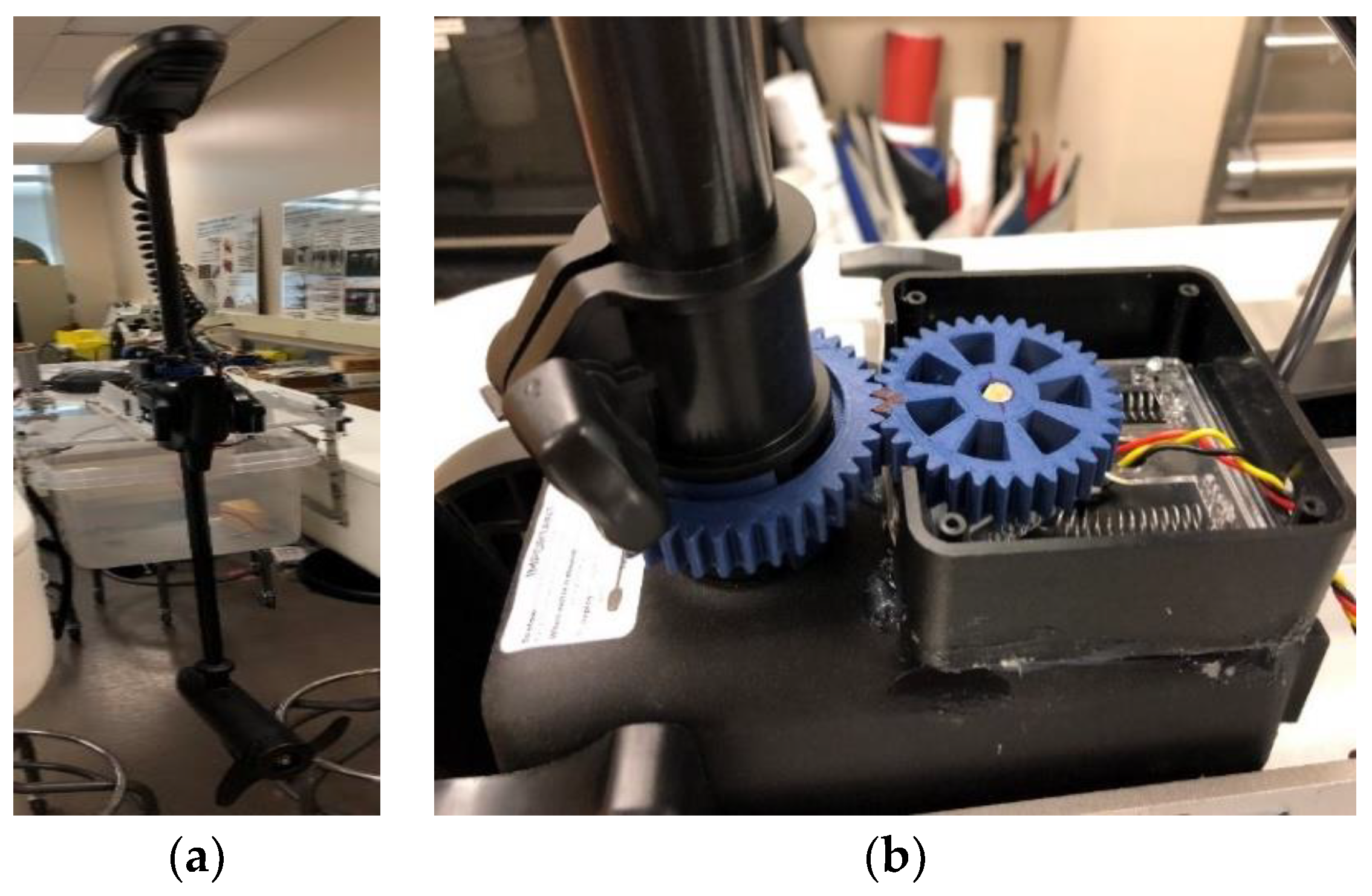
2.1.2. Propulsion and Steering
2.1.3. Navigation and Control Unit
2.1.4. Herbicide Dispersal System
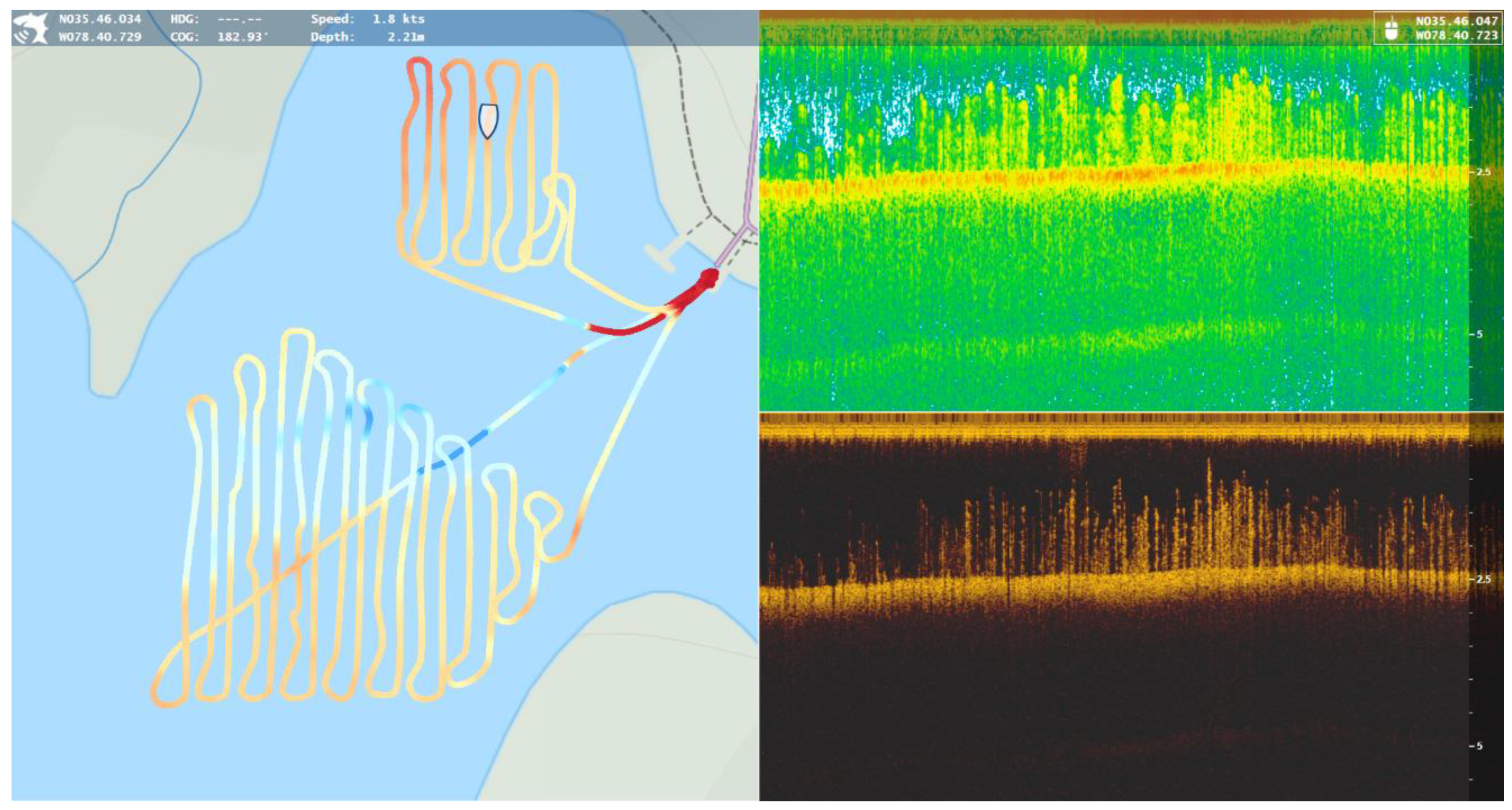
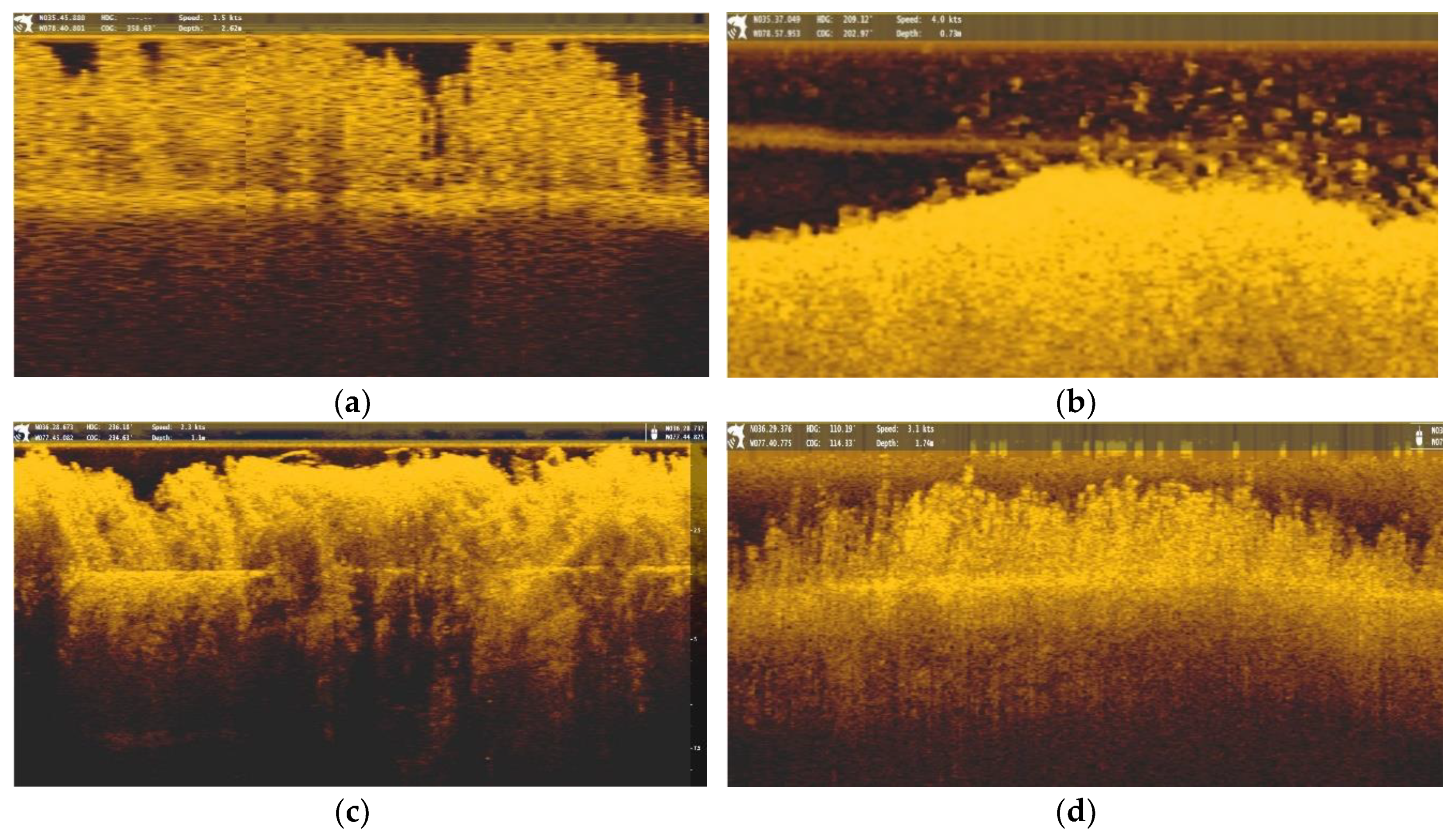
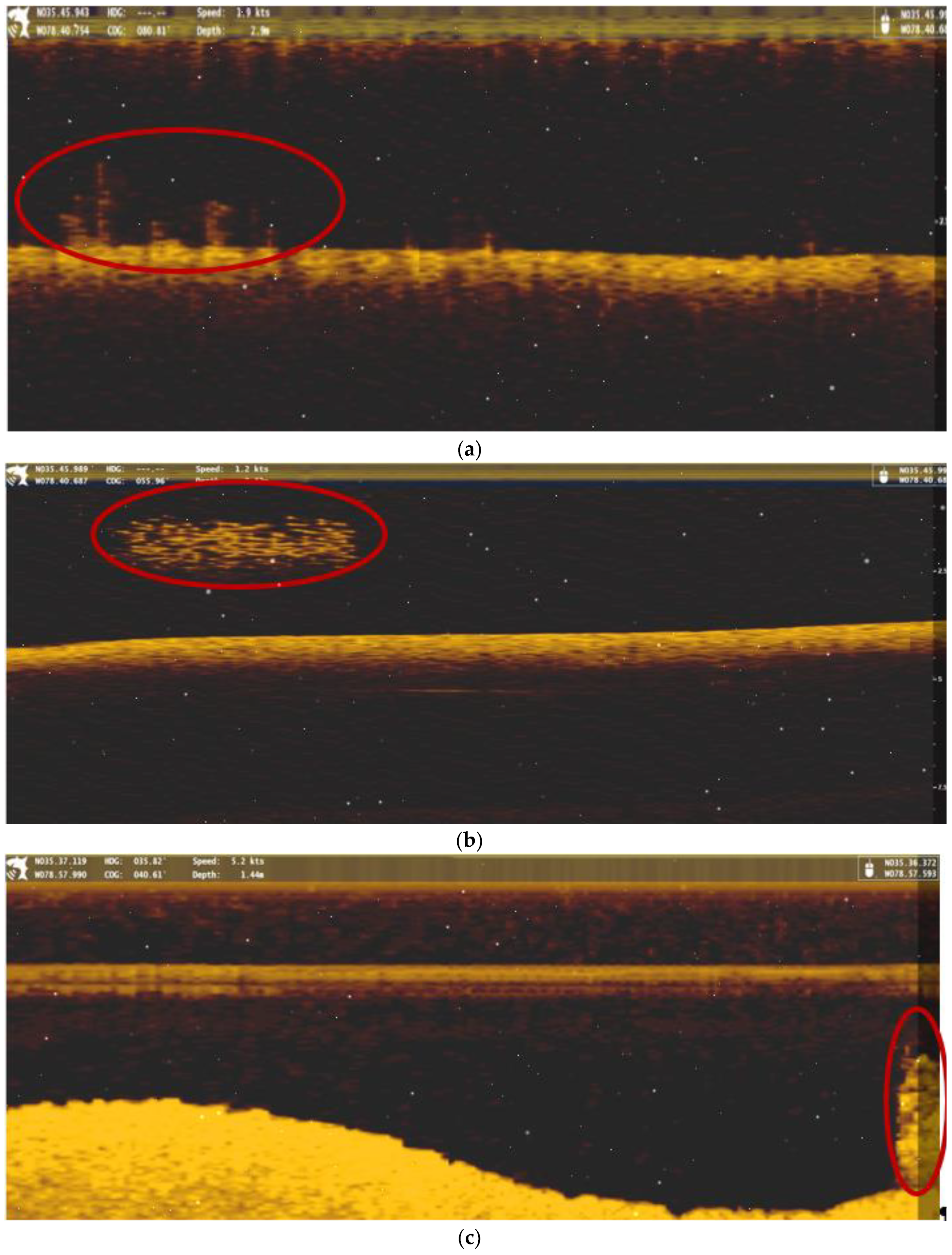
2.1.5. Hydroacoustic Imaging
2.2. Machine Learning for Aquatic Vegetation Classification
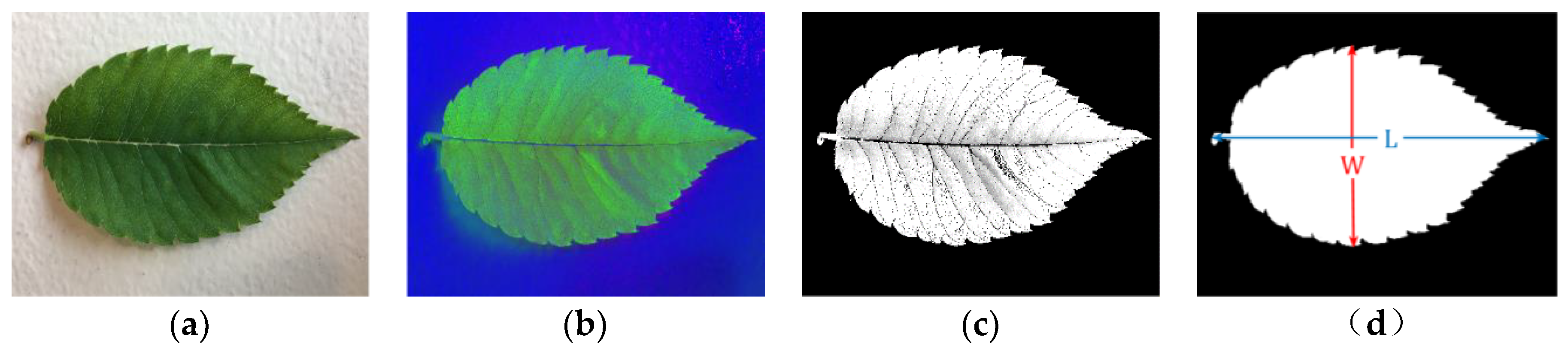
2.2.1. Data Preprocessing
2.2.2. Hardware and Software Configuration
2.2.3. DNN Training
2.2.4. Reducing Overfitting
2.2.5. Generalizing Over Multiple Species
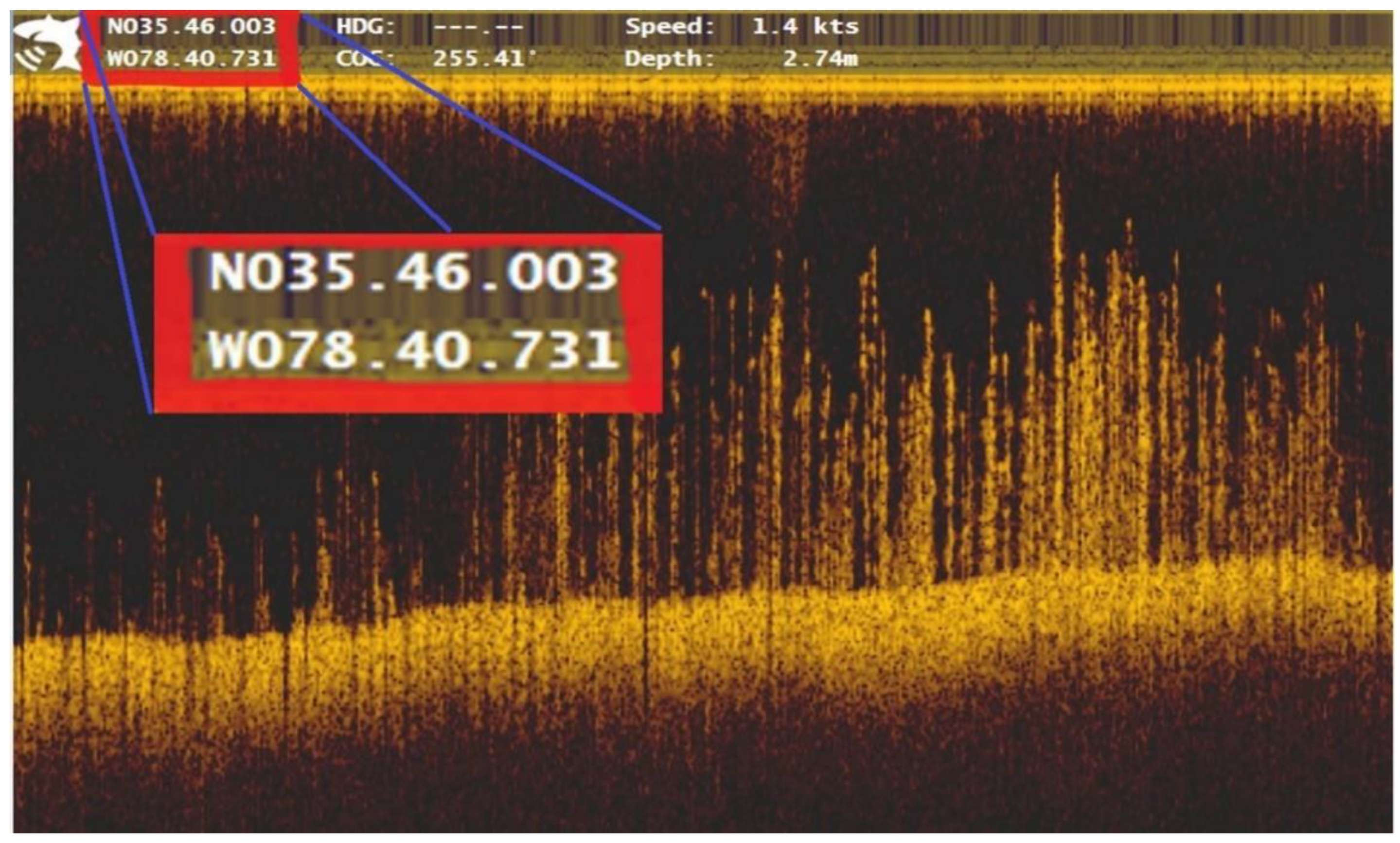
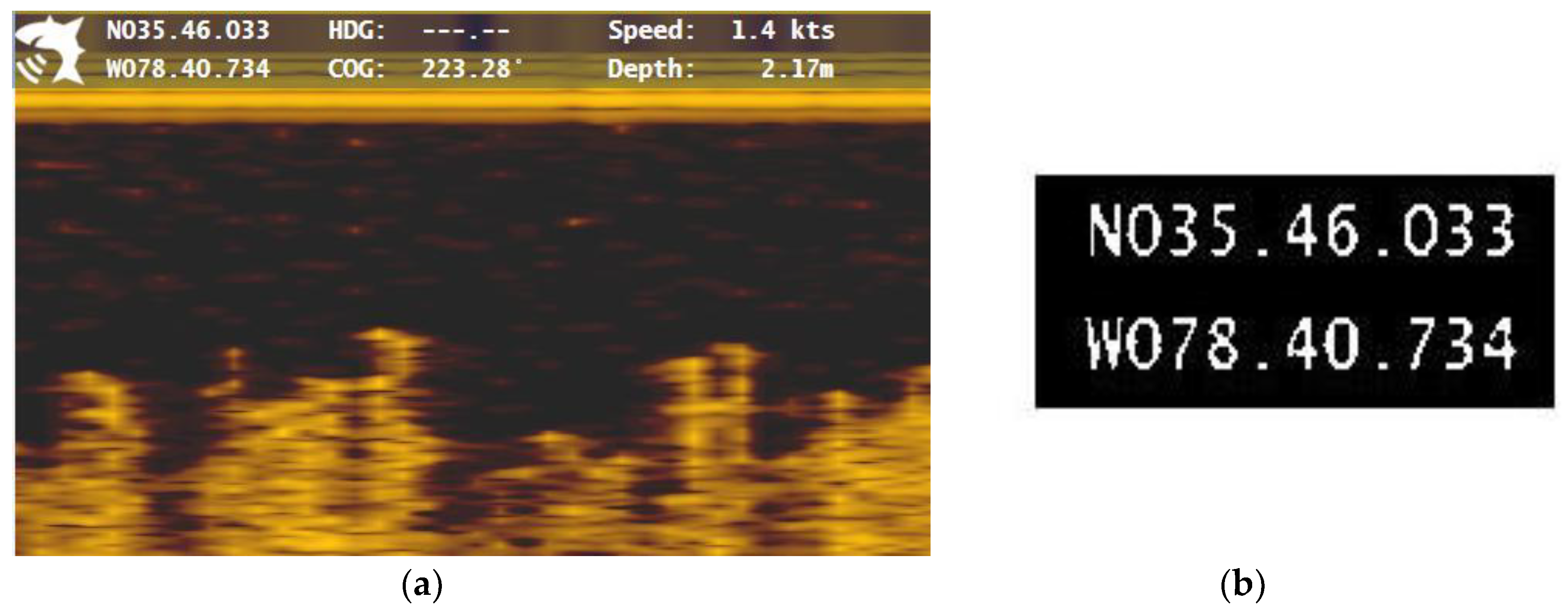
2.2.6. Extracting GPS Coordinates from Images Post-Classification
3. Results
3.1. Autonomous Vehicle Performance
3.1.1. Autonomous Navigation
3.1.2. Hydraulic Stability and Operational Depth
3.1.3. Battery Life
3.1.4. Herbicide Dispersal System
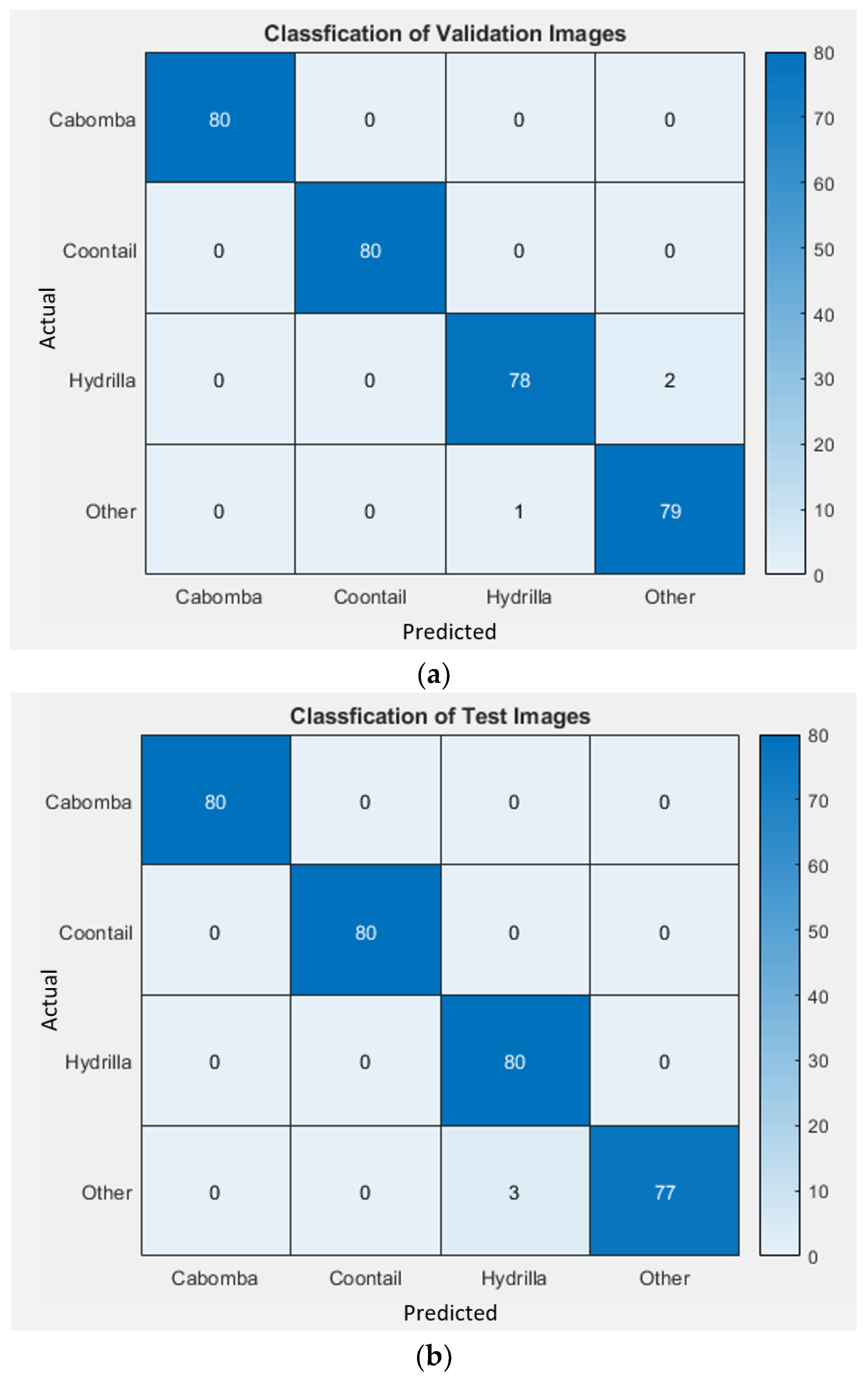
3.2. Machine Learning Algorithm
Vegetation Classification
4. Discussion
Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Pimentel, D.; Zuniga, R.; Morrison, D. Update on the environmental and economic costs associated with alien-invasive species in the United States. Ecol. Econ. 2005, 52, 273–288. [Google Scholar] [CrossRef]
- Rockwell, H.W. Summary of a Survey of the Literature on the Economic Impact of Aquatic Weeds; Aquatic Ecosystem Restoration Foundation: Flint, MI, USA, 2003. [Google Scholar]
- Gettys, L.A.; Haller, W.T.; Petty, D.G. Biology and Control of Aquatic Plants: A Best Management Practices Handbook; Aquatic Ecosystem Restoration Foundation: Marietta, GA, USA, 2019. [Google Scholar]
- McComas, S. Lake and Pond Management Guidebook; CRC Press: Boca Raton, FL, USA, 2003. [Google Scholar]
- Lembi, C.A. Identifying and Managing Aquatic Vegetation; Formerly Purdue Extension Publication WS-21-W; Purdue University Cooperative Extension Service: West Lafayette, IN, USA, 2009. [Google Scholar]
- Bell, F.W.; Bonn, M.A. Economic Sectors at Risk from Invasive Aquatic Weeds at Lake Istokpoga, Florida. 2004. Available online: http://www. aquatics. org/pubs/economics. htm (accessed on 7 June 2019).
- Buck, B. UF/IFAS Researchers Try to Cut Costs to Control Aquatic Invasive Plants in Florida; University of Florida Institute of Food and Agricultural Sciences IFAS Blogs: Gainesville, FL, USA, 2016. [Google Scholar]
- Langeland, K.A. Hydrilla verticillata (L. F.) Royle (Hydrocharitaceae), The Perfect Aquatic Weed. South. Appalach. Bot. Soc. 1996, 61, 293–304. [Google Scholar]
- Langeland, K.A.; Enloe, S.F.; Gettys, L. Hydrilla Management in Florida Lakes; U.S. Department of Agriculture UF/IFAS Extension: Gainesville, FL, USA, 2012. [Google Scholar]
- Bain, M.B. Assessing impacts of introduced aquatic species: Grass carp in large systems. Environ. Manag. 1993, 17, 211–224. [Google Scholar] [CrossRef]
- Helfrich, L.; Neves, R.; Libey, G.; Newcomb, T. Control Methods for Aquatic Plants in Ponds and Lakes. Available online: https://vtechworks.lib.vt.edu/handle/10919/48945 (accessed on 1 April 2019).
- Blanco, A.; Qu, J.J.; Roper, W.E. Spectral signatures of hydrilla from a tank and field setting. Front. Earth Sci. 2012, 6, 453–460. [Google Scholar] [CrossRef]
- Hänggi, T. Design of an Autonomous Sampling Boat for the Study of Algae Bloom in Lake Zurich. Master’s Thesis, Swiss Federal Institute of Technology Zurich, Zurich, Switzerland, 2009. [Google Scholar]
- Kho, S.J.; Manickam, S.; Malek, S.; Mosleh, M.; Dhillon, S.K. Automated plant identification using artificial neural network and support vector machine. Front. Life Sci. 2017, 10, 98–107. [Google Scholar] [CrossRef] [Green Version]
- Pereira, L.A.M.; Nakamura, R.Y.M.; de Souza, G.F.S.; Martins, D.; Papa, J.P. Aquatic weed automatic classification using machine learning techniques. Comput. Electron. Agric. 2012, 87, 56–63. [Google Scholar] [CrossRef]
- Hung, C.; Xu, Z.; Sukkarieh, S. Feature learning based approach for weed classification using high resolution aerial images from a digital camera mounted on a UAV. Remote Sens. 2014, 6, 12037–12054. [Google Scholar] [CrossRef]
- Baron, J.; Hill, D.J.; Elmiligi, H. Combining image processing and machine learning to identify invasive plants in high-resolution images. Int. J. Remote Sens. 2018, 39, 5099–5118. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Nielsen, M. Neural Networks and Deep Learning; Determination Press: San Francisco, CA, USA, 2015. [Google Scholar]
- Sun, Y.; Liu, Y.; Wang, G.; Zhang, H. Deep Learning for Plant Identification in Natural Environment. Comput. Intell. Neurosci. 2017, 2017, 7361042. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Wang, Z.; Liu, X.; Zeng, N.; Liu, Y.; Alsaadi, F.E. Neurocomputing A survey of deep neural network architectures and their applications. Neurocomputing 2017, 234, 11–26. [Google Scholar] [CrossRef]
- Convolutional Neural Network: 3 Things You Need to Know. Available online: https://www.mathworks.com/solutions/deep-learning/convolutional-neural-network.html (accessed on 6 June 2019).
- Beverly, G.T. Development and Experimentation of an Herbicide Dispersal System for an Autonomous Aquatic Weed Management System. Master’s Thesis, North Carolina State University, Raleigh, NC, USA, 2017. [Google Scholar]
- Park, S.; Deyst, J.; How, J. A New Nonlinear Guidance Logic for Trajectory Tracking. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Providence, RI, USA, 16–19 August 2004; pp. 1–16. [Google Scholar]
- Jones, B. Plane: L1 Control for Straight and Curved Path Following. 2013. Available online: https://github.com/ArduPilot/ardupilot/pull/101 (accessed on 7 June 2019).
- Khaled, N. Screen Record. MathWorks File Exchange. 2008. Available online: https://www.mathworks.com/matlabcentral/fileexchange/21216-screen-record (accessed on 8 November 2018).
- Domingos, P. A Few Useful Things to Know About Machine Learning. Commun. ACM 2012, 55, 78–87. [Google Scholar] [CrossRef]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A Simple Way to Prevent Neural Networks from Overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1–9. [Google Scholar] [CrossRef]
- Keskar, N.; Mudigere, D.; Nocedal, J.; Smelyanskiy, M.; Tang, P. On large-batch training for deep learning: Generalization gap and sharp minima. In Proceedings of the International Conference on Learning Representations, Toulon, France, 24–26 April 2017; pp. 1–16. [Google Scholar]
- Understanding and Visualizing Convolutional Neural Networks. Available online: http://cs231n.github.io/understanding-cnn/ (accessed on 7 June 2019).
- Dabrowski, A.; Stelzer, R. A Digital Interface for Imagery and Control of a Navico/Lowrance Broadband Radar. In Breizh Spirit, a Reliable Boat for Crossing the Atlantic Ocean; Springer: Berlin/Heidelberg, Germany, 2011; pp. 169–181. [Google Scholar]






















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Patel, M.; Jernigan, S.; Richardson, R.; Ferguson, S.; Buckner, G. Autonomous Robotics for Identification and Management of Invasive Aquatic Plant Species. Appl. Sci. 2019, 9, 2410. https://doi.org/10.3390/app9122410
Patel M, Jernigan S, Richardson R, Ferguson S, Buckner G. Autonomous Robotics for Identification and Management of Invasive Aquatic Plant Species. Applied Sciences. 2019; 9(12):2410. https://doi.org/10.3390/app9122410
Chicago/Turabian StylePatel, Maharshi, Shaphan Jernigan, Rob Richardson, Scott Ferguson, and Gregory Buckner. 2019. "Autonomous Robotics for Identification and Management of Invasive Aquatic Plant Species" Applied Sciences 9, no. 12: 2410. https://doi.org/10.3390/app9122410
APA StylePatel, M., Jernigan, S., Richardson, R., Ferguson, S., & Buckner, G. (2019). Autonomous Robotics for Identification and Management of Invasive Aquatic Plant Species. Applied Sciences, 9(12), 2410. https://doi.org/10.3390/app9122410