A Motion Control of Soft Gait Assistive Suit by Gait Phase Detection Using Pressure Information

 , , and
, , and
Abstract
:1. Introduction
1.1. Background
- The walking assistive device has a rigid link system. However, its heavy weight will decrease the safeness and usability, especially for elder persons.
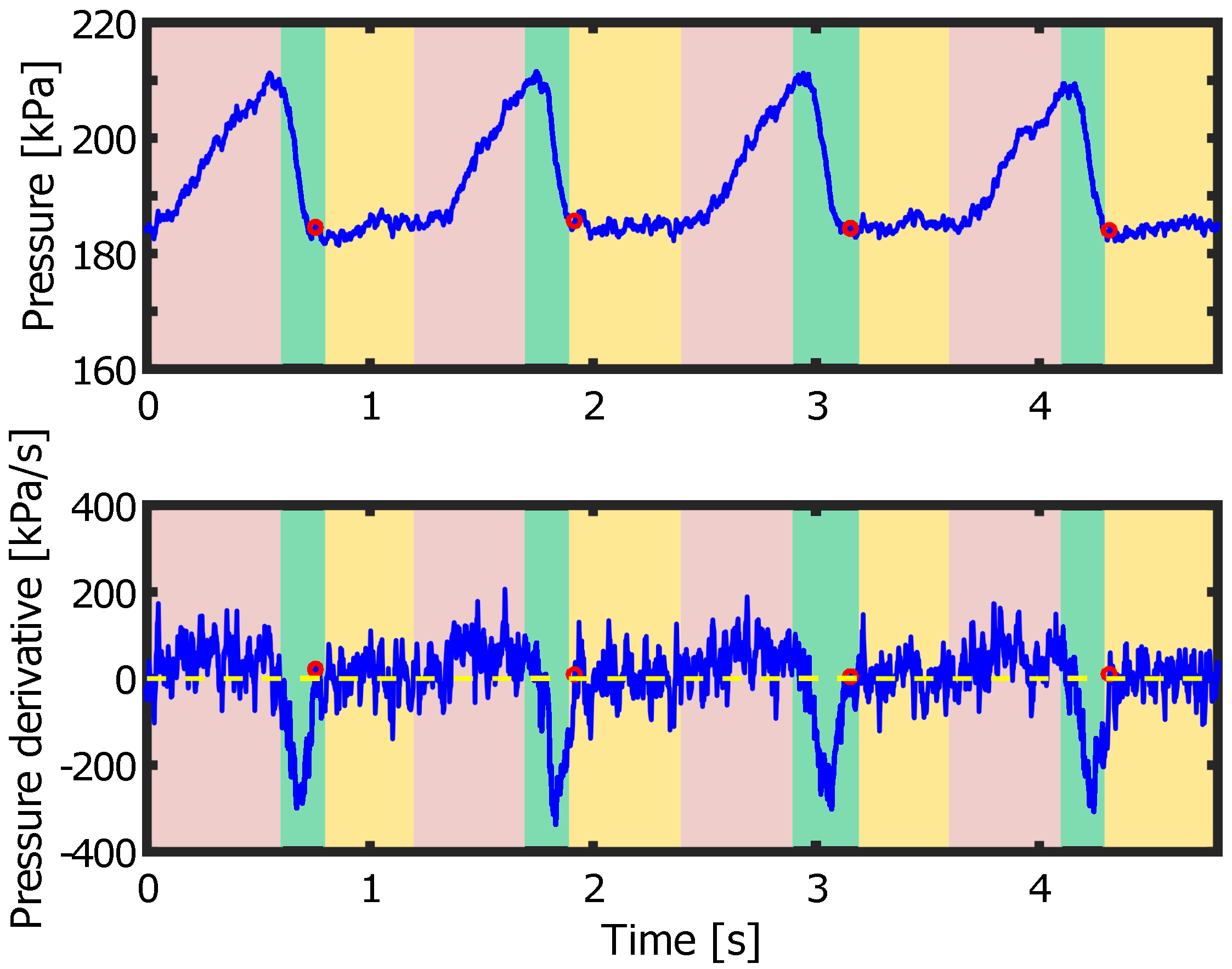
- The gait phase detection method uses the time derivative of the pressure. However, it is not sufficient for the accurate detection since there are several timings which satisfy the detection condition in one gait cycle.
- Pressure input time of the PARMs is given as constant. However, when the walking speed is changed, the input time should be also changed appropriately considering the walking cycle time.
1.2. Contribution of This Paper
2. Soft Gait Assistive Suit
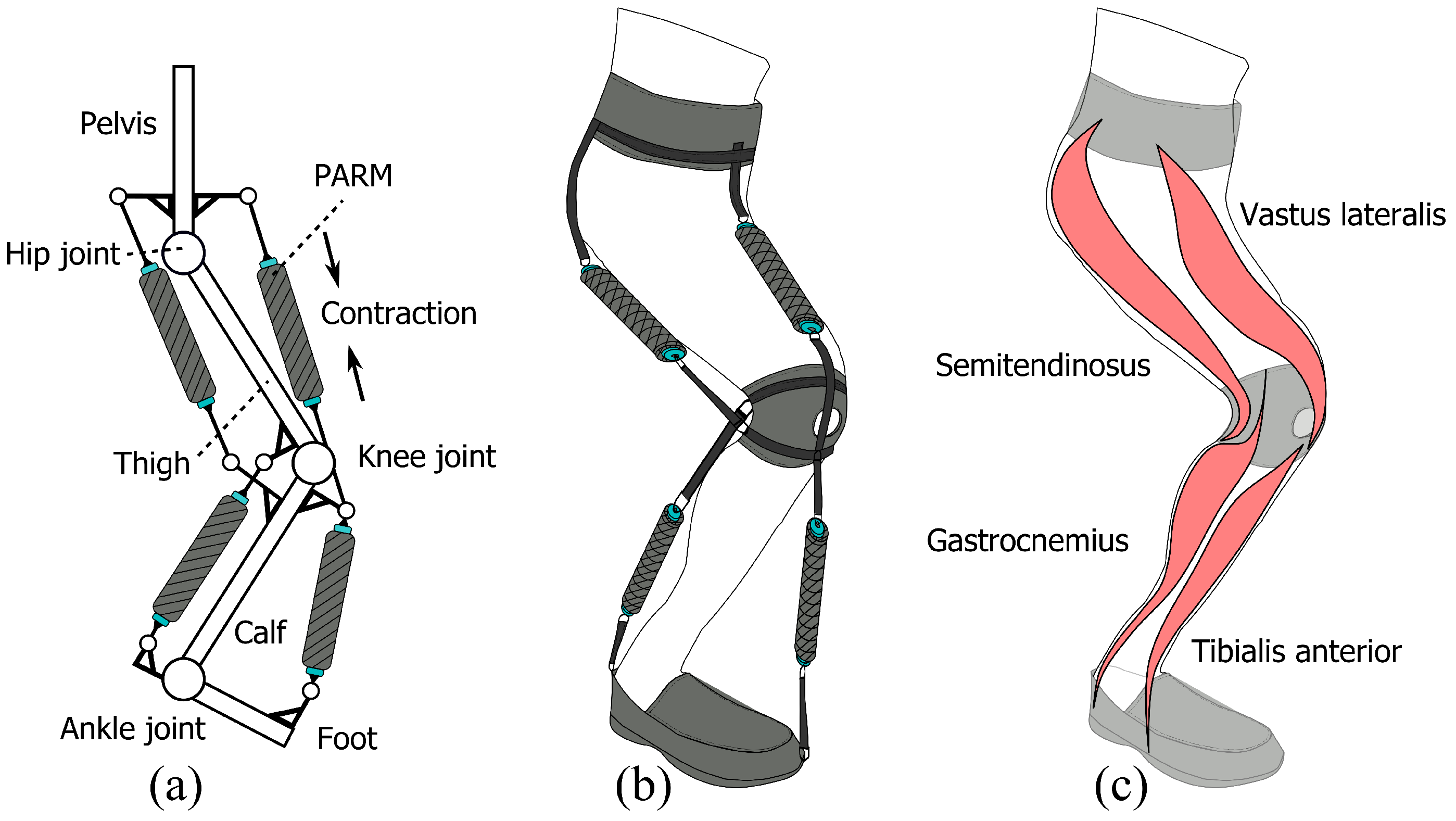
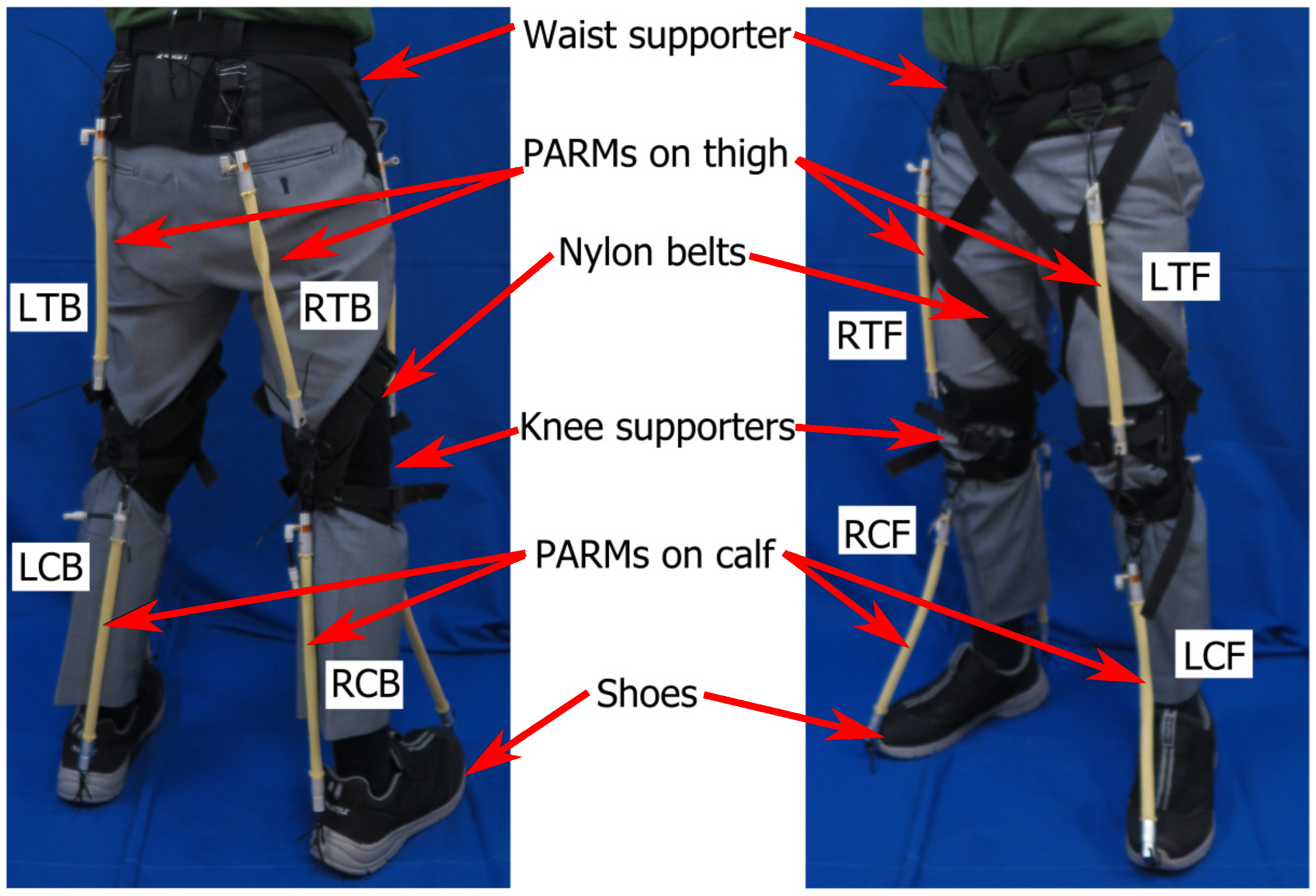
2.1. Mechanical Design of Soft Gait Assistive Suit
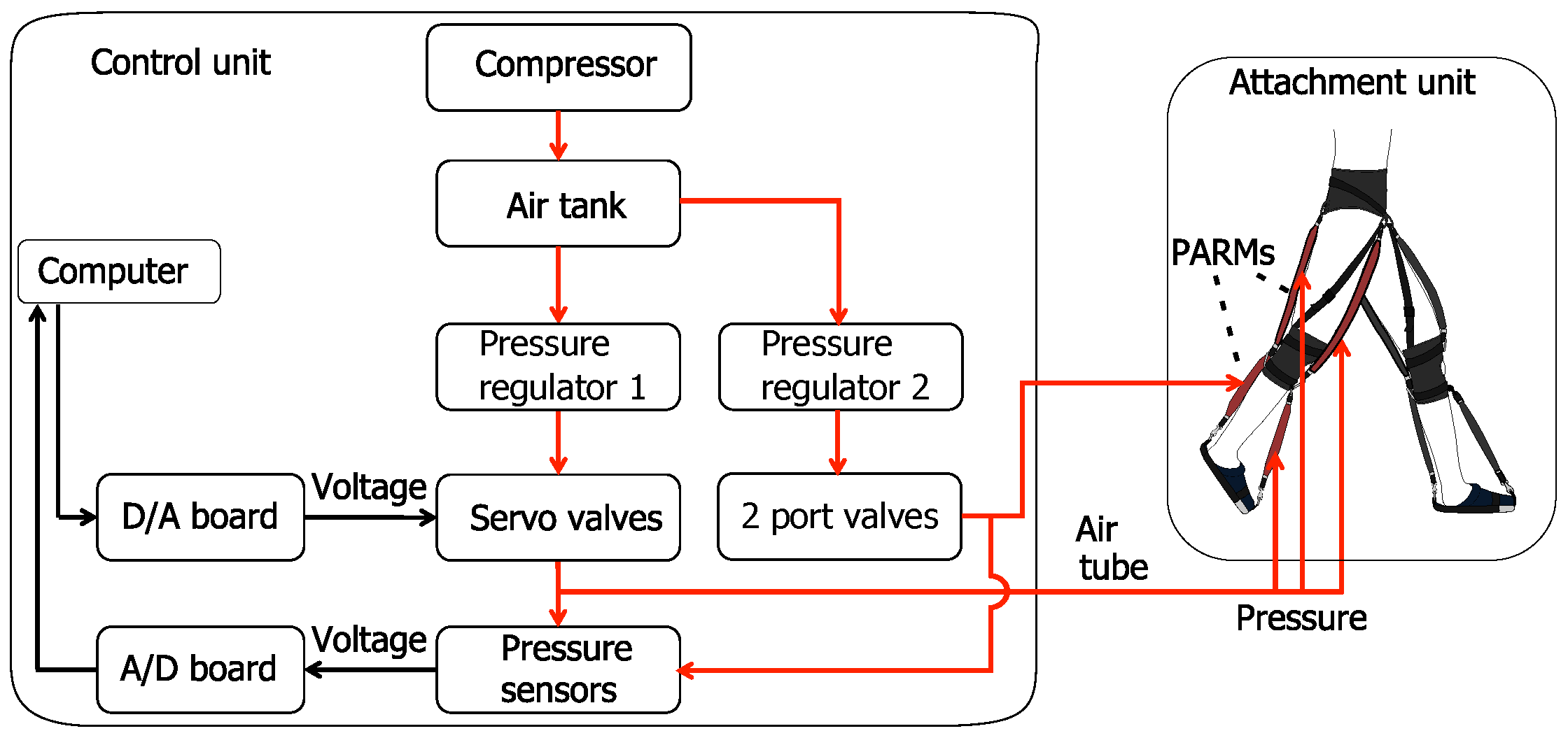
2.2. Pneumatic Control System
3. Gait Phase Detection Method
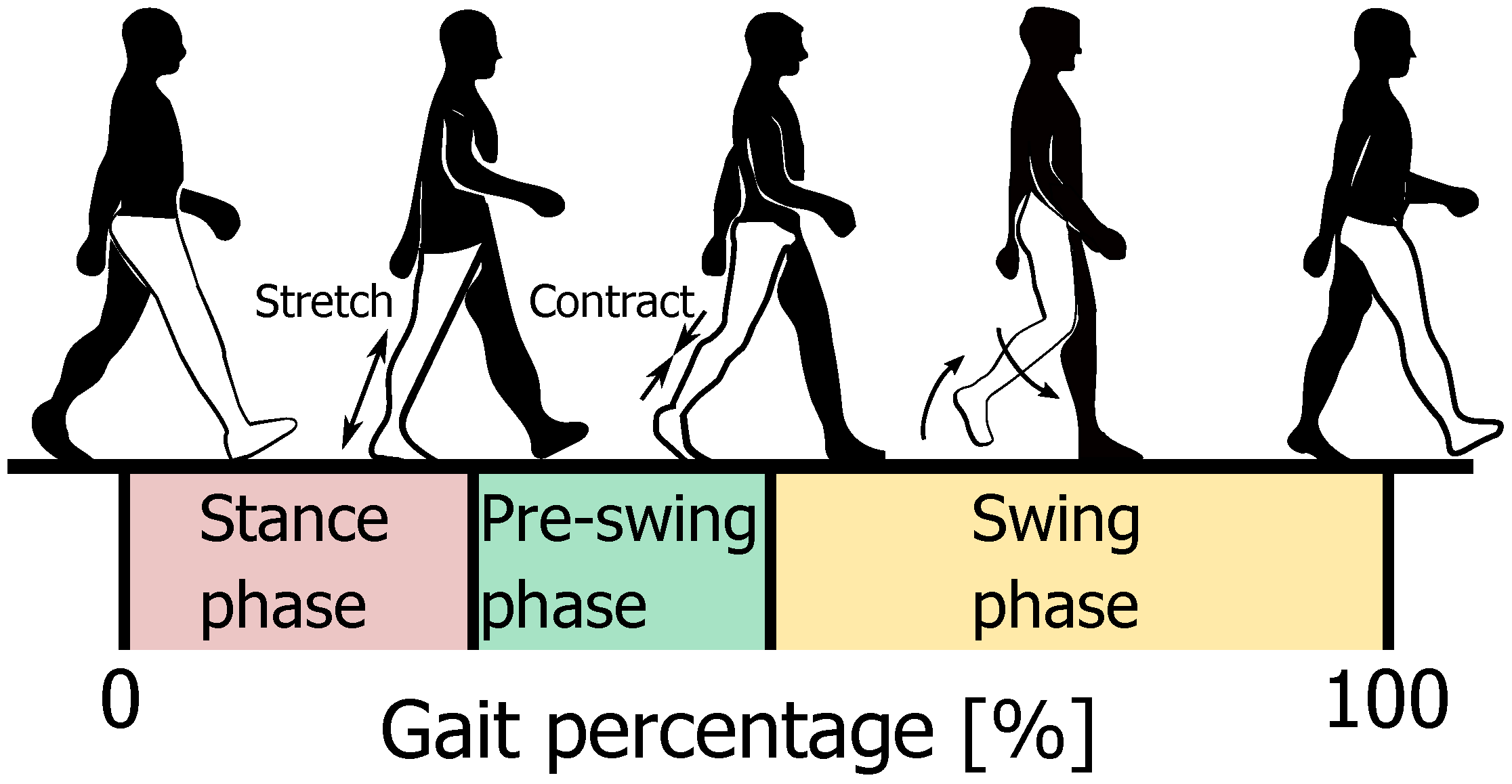
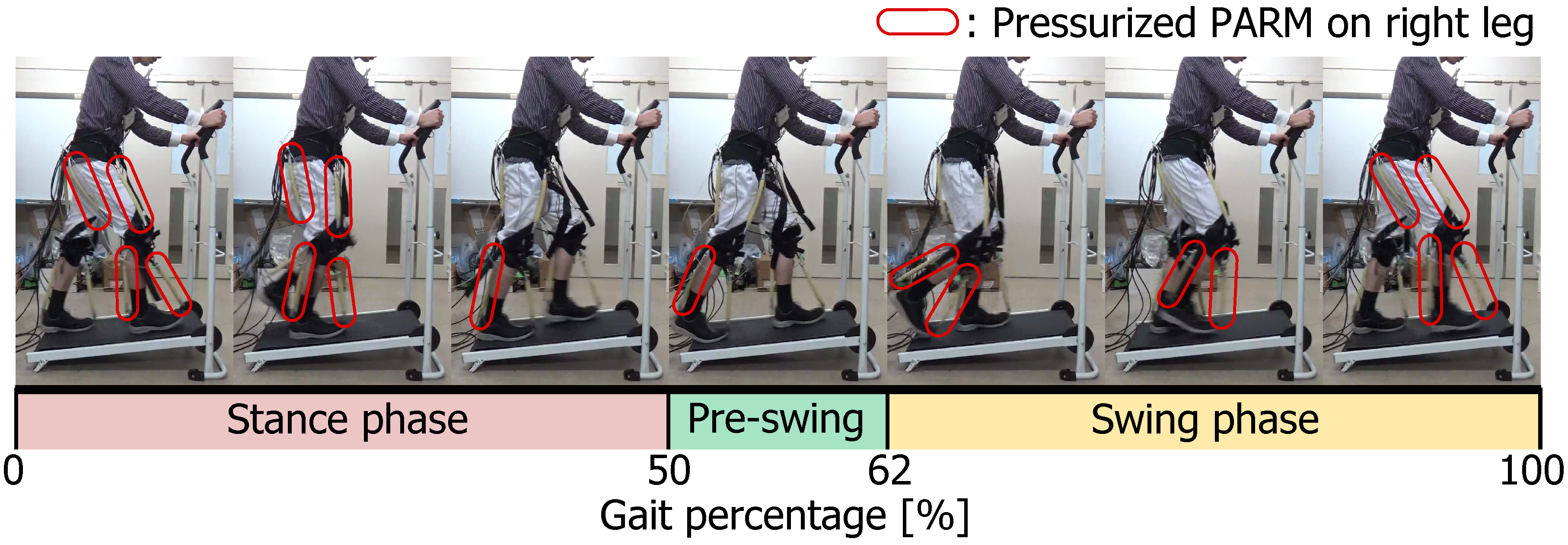
3.1. Forward Walking Sequence and Target Assist Timing
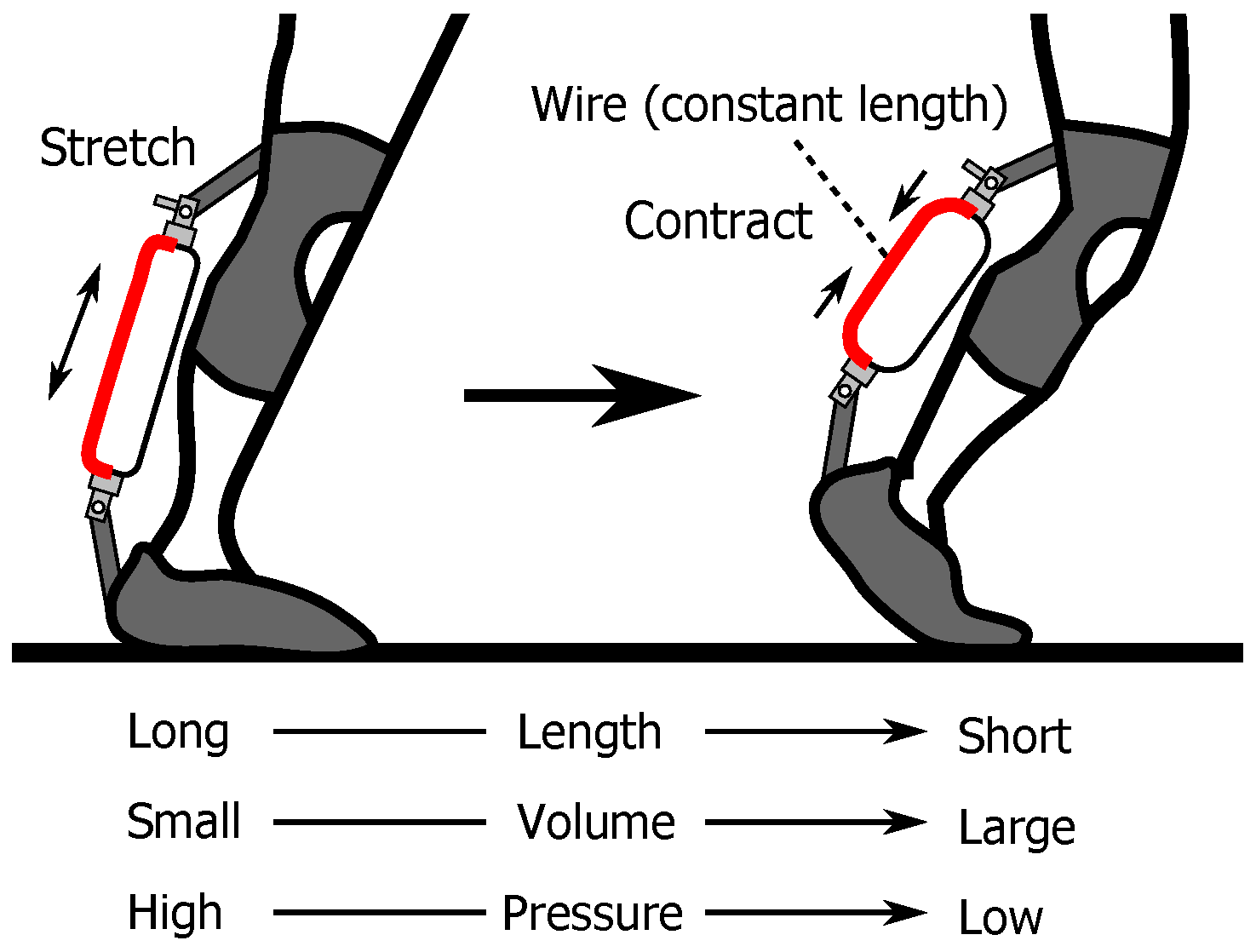
3.2. Relation between Calf Back PARM Variables
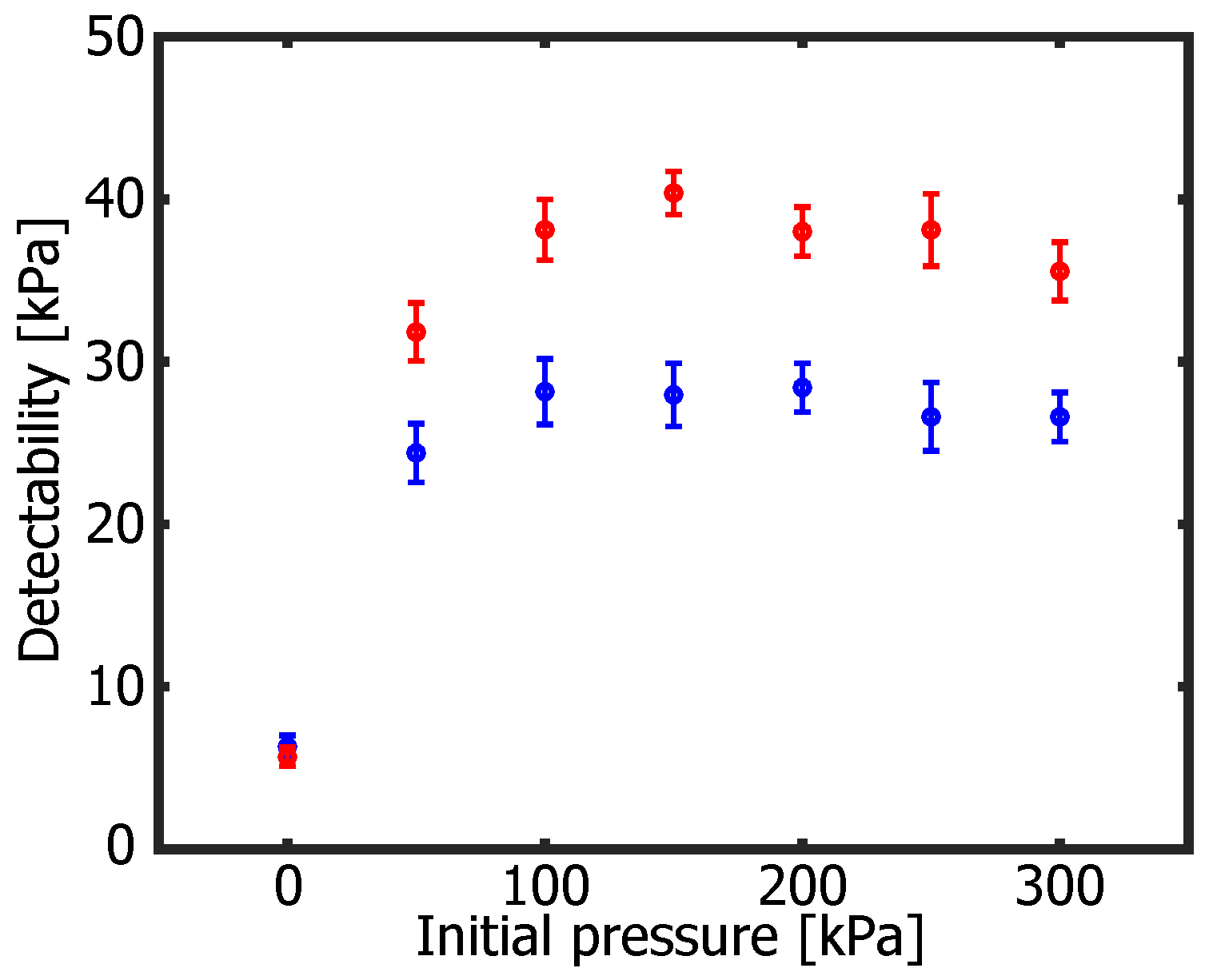
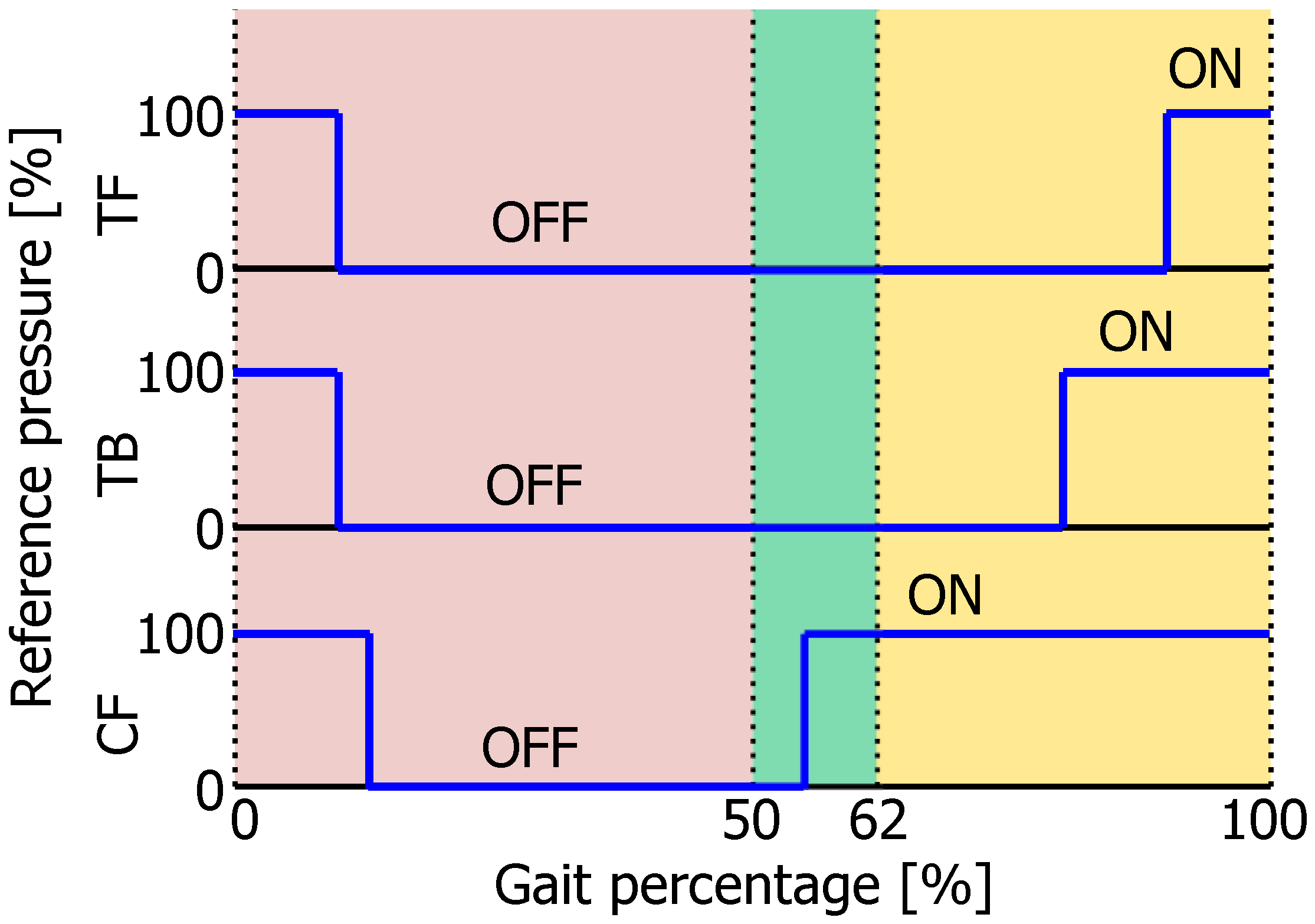
3.3. Pressure Configuration in Calf Back PARMs
3.4. Modification of Phase Detection Method
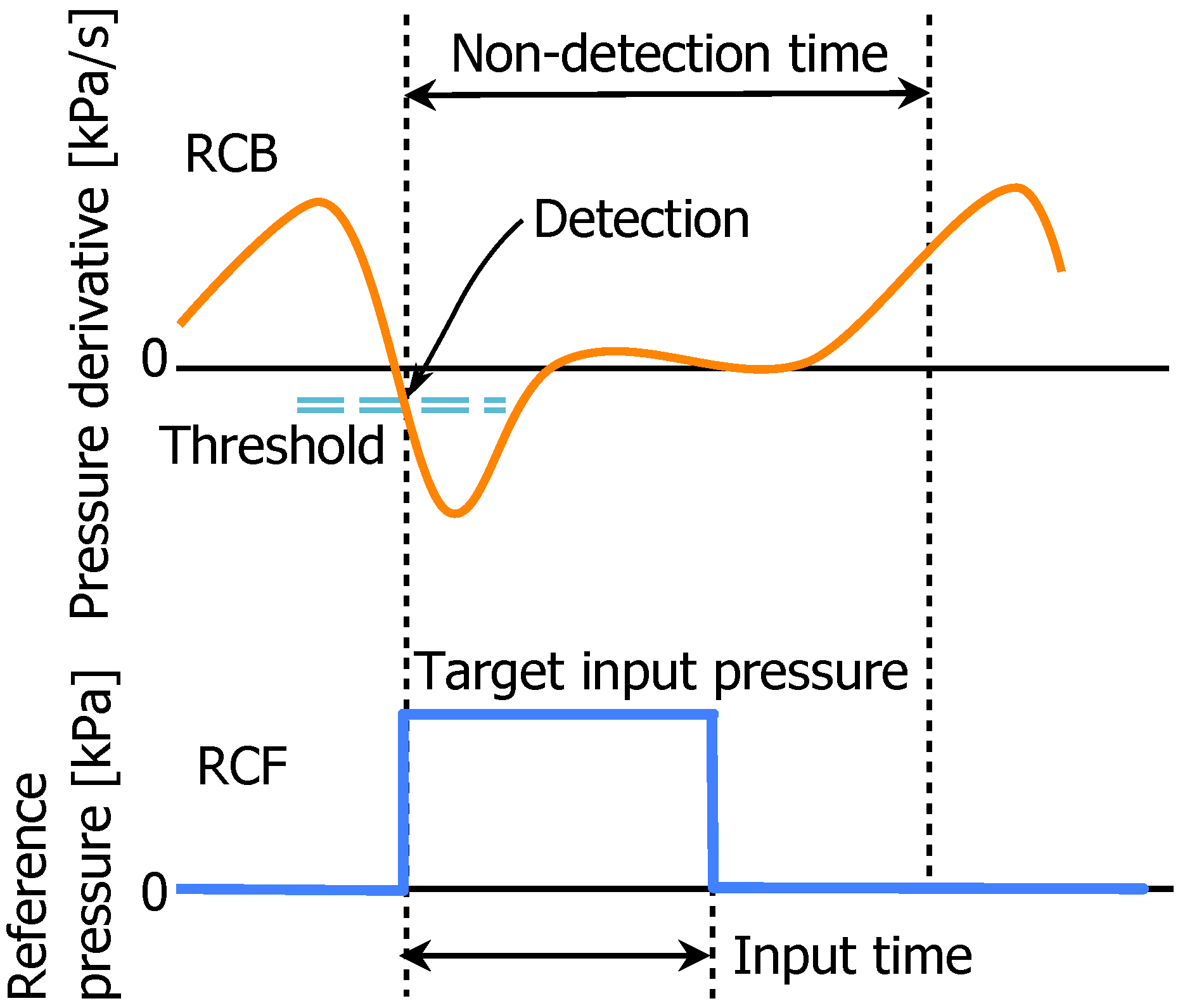
3.4.1. Conventional Detection Method
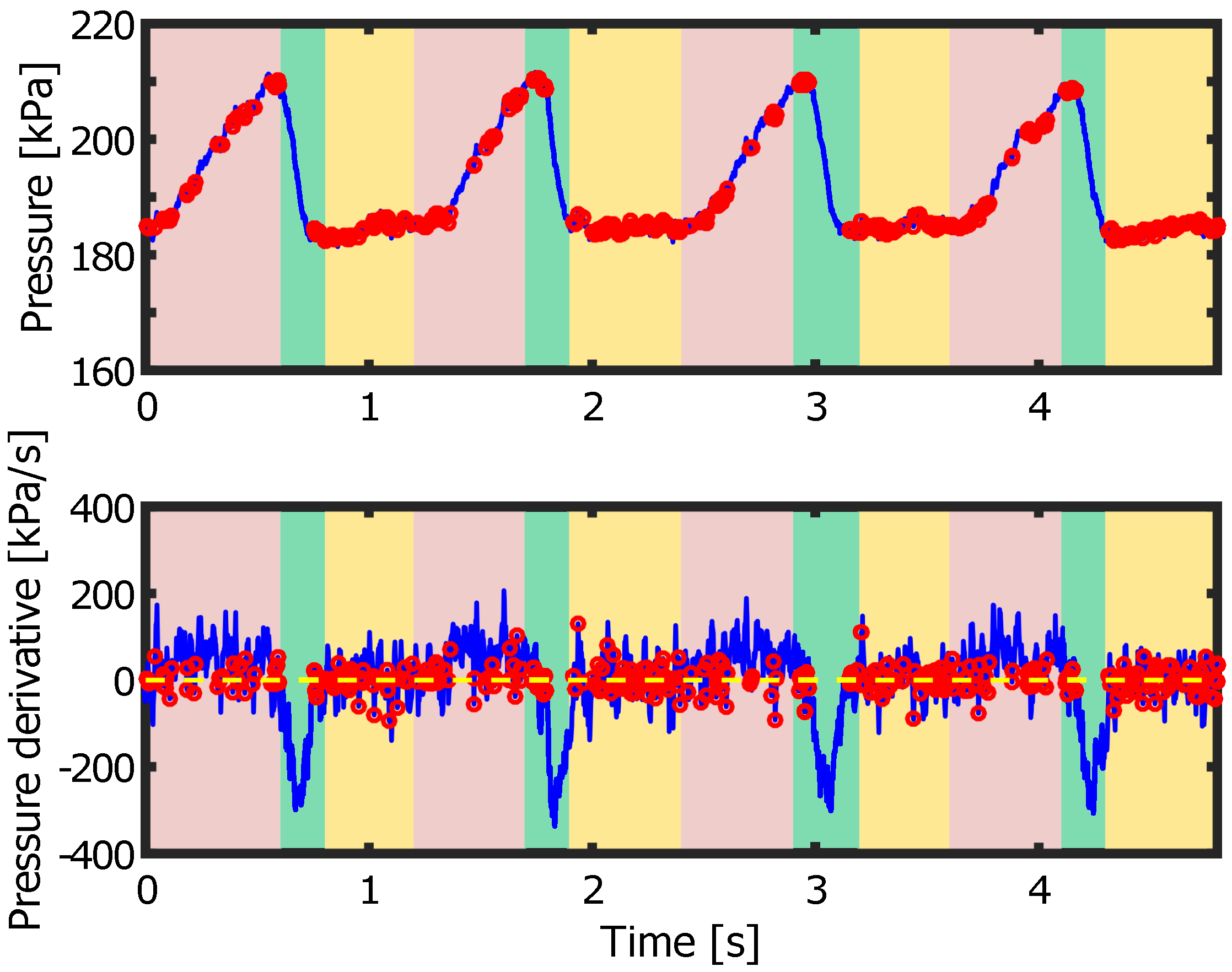
3.4.2. Novel Detection Method
- The time step is detected as the timing that the pressure derivative of the CB PARMs crosses the threshold .
- The measured pressure of the CB PARMs (kPa) at the time step is recorded, and the previously detected and are set as and (kPa).
- The difference of and are calculated as (kPa). When is less than the threshold , is set as the assist timing .
- Return to step 1 and repeat these steps.
4. Gait Assistive Control Method
4.1. Control Sequence
- Walking start
- Pre-swing phase detection
- Walking assist (by applying the step input pressures to the PARMs controlled by the servo valves)
- Return to step 2 and repeat these steps
4.2. Control of Pressure Input Time
5. Evaluation Experiments
5.1. Control Parameter Settings
5.2. Verification of Proposed Control Method
5.2.1. Experimental Method
5.2.2. Experimental Result
5.2.3. Discussion
5.3. Electromyogram Measurement
5.3.1. Experimental Method
- Measuring the RMS value in MVC state .
- Resting 5 min.
- EMG measurement of the walking without the suit.
- Wearing the suit.
- Practicing of the assisted walking.
- Resting 10 min.
- EMG measurement of the asssited walking.
5.3.2. Experimental Result
5.3.3. Discussion
6. Conclusions
- We developed the soft gait assistive suit actuated by the PARMs. The target task is to assist the trainee’s forward walking on the treadmill, and the PARMs are placed on the anterior and posterior surfaces of the thigh and the calf. The proposed gait assistive suit consists of the attachment unit and the control unit, and these units are separated physically and only connected by air tubes. The attachment unit has a lightweight soft structure, and the unique feature of the unit is that it has no electrical devices. Because electrical sensors are not needed to be attached to the trainee, and the suit is soft and lightweight, it has the advantage of being easy and safe to use.
- We proposed the novel phase detection method using pressure and pressure derivative in the PARMs. The novel detection method is more robust to the signal noise compared with the conventional method since the pressure information is utilized which is smoother than the pressure derivative. Also, since the non-detection time is not required, the trainee can walk with a high walking rate.
- We proposed the calculation method of the gait cycle time from the assist timing. The average gait cycle time is calculated from the assist timing, and the proper pressure input time is obtained from the calculation result. The pressurized timing and duration in each PARM are given from the EMG activation time in each muscle near the PARM.
- We confirmed that the proposed gait assistive suit and its control method works correctly in the experiment. The phase detection accuracy and the change of the pressure input time were confirmed by comparing with the conventional control method. 1 trainee wore the gait assistive suit and walked 100 steps of 50 cycles on the treadmill with its speed of 3.0 km/h in each trial. We measured the two different gaits with their walking rate of 90 and 140 BPM by using a metronome. The total 100 walking steps were measured, and the success rate of the phase detection was counted in each case. In the case of 90 BPM walking, the conventional and the proposed control methods achieved 100% success rate. On the other hand, in the case of 140 BPM, the proposed control method achieved 100% detection, and the success rate of the conventional control method was 72%. As a result, it was confirmed that the regular and precise phase detection can be achieved in an arbitrary walking rate by using the proposed control method.
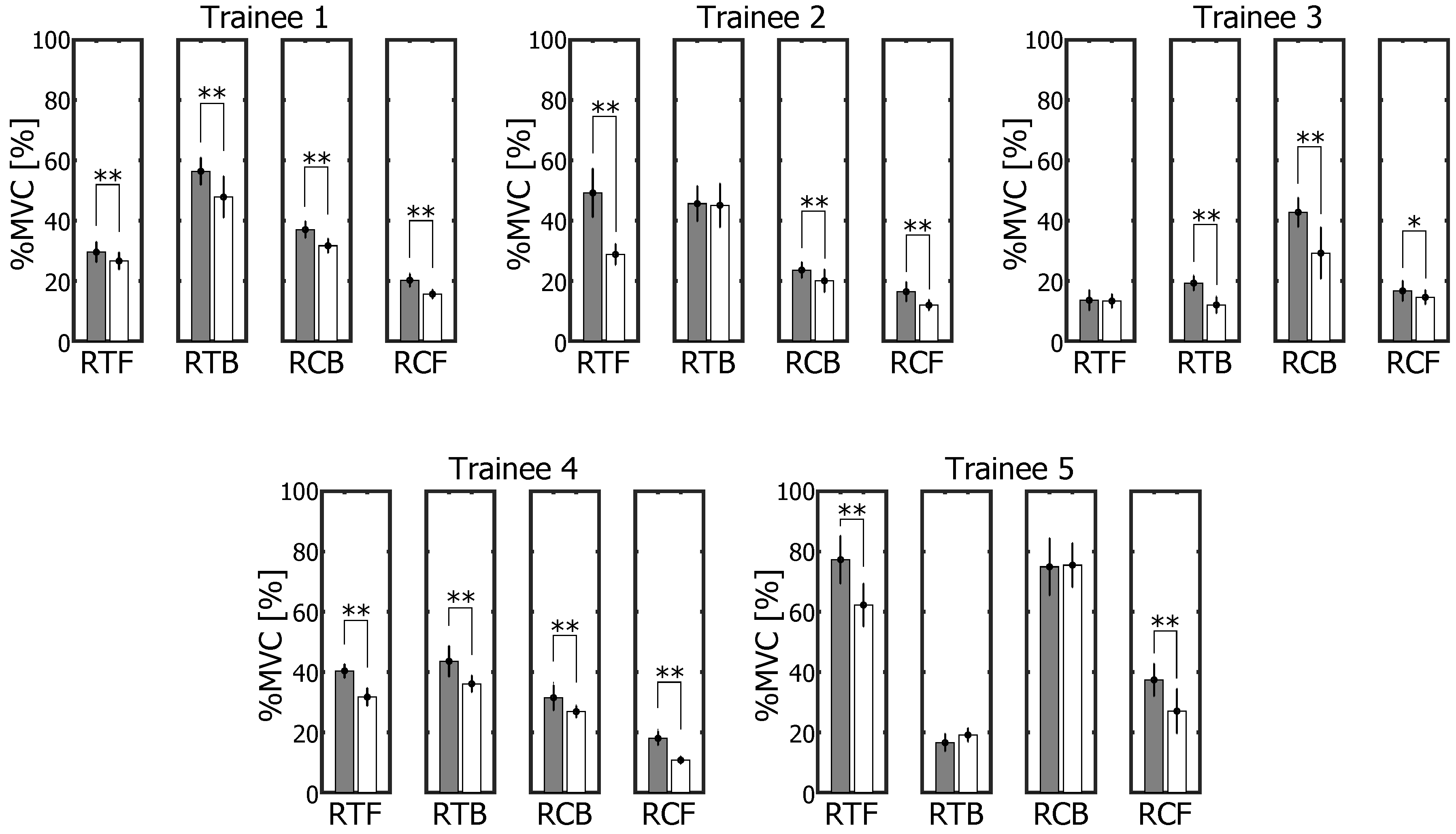
- We verified whether the gait assistive suit is effective for decreasing activity in the trainee’s muscles. We measured and compared the muscular activities of the assisted walking and walking without the suit. 5 healthy males in their 20 s and 30 s walked on the treadmill. EMG signals were recorded by EMG sensors, and their values were calculated. The trainee walks on the treadmill 40 steps of 20 cycles with its speed of 5.0 km/h in each trial. The average values with assist were less than or equal to the values without assist. This tendency was observed in all subjects. The results quantitatively confirmed that the suit can reduce muscular activity.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yan, T.; Cempini, M.; Oddo, C.M.; Vitiello, N. Review of assistive strategies in powered lower-limb orthoses and exoskeletons. Robot. Auton. Syst. 2015, 64, 120–136. [Google Scholar] [CrossRef]
- Low, K.H. Robot-assisted gait rehabilitation: From exoskeletons to gait systems. In Proceedings of the 2011 Defense Science Research Conference and Expo (DSR), Singapore, 3–5 August 2011; pp. 1–10. [Google Scholar] [CrossRef]
- Herr, H. Exoskeletons and orthoses: Classification, design, and future directions. J. Neuroeng. Rehabil. 2009, 6. [Google Scholar] [CrossRef] [PubMed]
- Sankai, Y. HAL: Hybrid assistive limb based on cybernics. In Robotics Research; Kaneko, M., Nakamura, Y., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 25–34. [Google Scholar]
- Yamamoto, K.; Ishii, M.; Noborisaka, H.; Hyodo, K. Stand alone wearable power assisting suit—Sensing and control systems. In Proceedings of the 13th IEEE International Workshop on Robot and Human Interactive Communication (IEEE Catalog No.04TH8759), Okayama, Japan, 22–22 September 2004; pp. 661–666. [Google Scholar] [CrossRef]
- Chen, S. Assistive control system for upper limb rehabilitation robot. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 1199–1209. [Google Scholar] [CrossRef] [PubMed]
- Lemerle, S.; Nozaki, T.; Ohnishi, K. Design and evaluation of a remote actuated finger exoskeleton using motion-copying system for tendon rehabilitation. IEEE Trans. Ind. Inf. 2018, 14, 5167–5177. [Google Scholar] [CrossRef]
- Lu, R.; Li, Z.; Su, C.; Xue, A. Development and learning control of a human limb with a rehabilitation exoskeleton. IEEE Trans. Ind. Electron. 2014, 61, 3776–3785. [Google Scholar] [CrossRef]
- Pyo, S.; Ozer, A.; Yoon, J. A novel design for lower extremity gait rehabilitation exoskeleton inspired by biomechanics. In Proceedings of the ICCAS 2010, Gyeonggi-do, Korea, 27–30 October 2010; pp. 1806–1811. [Google Scholar] [CrossRef]
- Gilbert, M.; Zhang, X.; Yin, G. Modeling and design on control system of lower limb rehabilitation exoskeleton robot. In Proceedings of the 2016 13th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Xi’an, China, 19–22 August 2016; pp. 348–352. [Google Scholar] [CrossRef]
- Asbeck, A.T.; De Rossi, S.M.M.; Galiana, I.; Ding, Y.; Walsh, C.J. Stronger, smarter, softer: Next-generation wearable robots. IEEE Robot. Autom. Mag. 2014, 21, 22–33. [Google Scholar] [CrossRef]
- Asbeck, A.T.; De Rossi, S.M.M.; Holt, K.G.; Walsh, C.J. A biologically inspired soft exosuit for walking assistance. Int. J. Robot. Res. 2015, 34, 744–762. [Google Scholar] [CrossRef]
- Asbeck, A.T.; Schmidt, K.; Walsh, C.J. Soft exosuit for hip assistance. Robot. Auton. Syst. 2015, 73, 102–110. [Google Scholar] [CrossRef]
- Talaty, M.; Esquenazi, A.; Briceno, J.E. Differentiating ability in users of the rewalkTM powered exoskeleton: An analysis of walking kinematics. In Proceedings of the 2013 IEEE 13th International Conference on Rehabilitation Robotics (ICORR), Seattle, WA, USA, 24–26 June 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Veneman, J.F.; Kruidhof, R.; Hekman, E.E.G.; Ekkelenkamp, R.; Van Asseldonk, E.H.F.; van der Kooij, H. Design and evaluation of the LOPES exoskeleton robot for interactive gait rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 379–386. [Google Scholar] [CrossRef] [PubMed]
- Kong, K.; Jeon, D. Design and control of an exoskeleton for the elderly and patients. IEEE/ASME Trans. Mechatron. 2006, 11, 428–432. [Google Scholar] [CrossRef]
- Kwa, H.K.; Noorden, J.H.; Missel, M.; Craig, T.; Pratt, J.E.; Neuhaus, P.D. Development of the IHMC mobility assist exoskeleton. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 2556–2562. [Google Scholar] [CrossRef]
- Kanno, T.; Morisaki, D.; Miyazaki, R.; Endo, G.; Kawashima, K. A walking assistive device with intention detection using back-driven pneumatic artificial muscles. In Proceedings of the 2015 IEEE International Conference on Rehabilitation Robotics (ICORR), Singapore, 11–14 August 2015; pp. 565–570. [Google Scholar] [CrossRef]
- Yang, Y.; Ma, L.; Huang, D. Development and repetitive learning control of lower limb exoskeleton driven by electrohydraulic actuators. IEEE Trans. Ind. Electron. 2017, 64, 4169–4178. [Google Scholar] [CrossRef]
- Zhu, J.; Wang, Y.; Zhou, H. Human-machine coupling control of exoskeleton intelligent load carry robot. In Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2012; pp. 268–272. [Google Scholar] [CrossRef]
- Kim, H.; Lee, J.; Jang, J.; Han, C.; Park, S. Mechanical design of an exoskeleton for load-carrying augmentation. In Proceedings of the IEEE ISR 2013, Seoul, Korea, 24–26 October 2013; pp. 1–5. [Google Scholar] [CrossRef]
- Walsh, C.J.; Pasch, K.; Herr, H. An autonomous, underactuated exoskeleton for load-carrying augmentation. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 1410–1415. [Google Scholar] [CrossRef]
- Kobayashi, H.; Matsushita, T.; Ishida, Y.; Kikuchi, K. New robot technology concept applicable to human physical support—The concept and possibility of the muscle suit (wearable muscular support apparatus). J. Robot. Mechatron. 2002, 14, 46–53. [Google Scholar] [CrossRef]
- Muramatsu, Y.; Kobayashi, H. Assessment of local muscle fatigue by NIRS—Development and evaluation of muscle suit. Robomech J. 2014, 1, 19. [Google Scholar] [CrossRef]
- Zoss, A.B.; Kazerooni, H.; Chu, A. Biomechanical design of the berkeley lower extremity exoskeleton (BLEEX). IEEE/ASME Trans. Mechatron. 2006, 11, 128–138. [Google Scholar] [CrossRef]
- Lee, S.; Kim, J.; Baker, L.; Long, A.; Karavas, N.; Menard, N.; Galiana, I.; Walsh, C.J. Autonomous multi-joint soft exosuit with augmentation-power-based control parameter tuning reduces energy cost of loaded walking. J. Neuroeng. Rehabil. 2018, 15, 66. [Google Scholar] [CrossRef]
- Dzahir, M.A.M.; Yamamoto, S. Recent trends in lower-limb robotic rehabilitation orthosis: Control scheme and strategy for pneumatic muscle actuated gait trainers. Robotics 2014, 3, 120–148. [Google Scholar] [CrossRef]
- Wehner, M.; Quinlivan, B.; Aubin, P.M.; Martinez-Villalpando, E.; Baumann, M.; Stirling, L.; Holt, K.; Wood, R.; Walsh, C.J. A lightweight soft exosuit for gait assistance. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 3362–3369. [Google Scholar] [CrossRef]
- Sridar, S.; Qiao, Z.; Muthukrishnan, N.; Zhang, W.; Polygerinos, P. A Soft-Inflatable Exosuit for Knee Rehabilitation: Assisting Swing Phase During Walking. Front. Robot. AI 2018, 5, 44. [Google Scholar] [CrossRef]
- Park, Y.; Santos, J.; Galloway, K.G.; Goldfield, E.C.; Wood, R.J. A soft wearable robotic device for active knee motions using flat pneumatic artificial muscles. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 4805–4810. [Google Scholar] [CrossRef]
- Sasaki, D.; Noritsugu, T.; Takaiwa, M. Development of pneumatic lower limb power assist wear driven with wearable air supply system. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 4440–4445. [Google Scholar] [CrossRef]
- Huang, H.; Zhang, F.; Hargrove, L.J.; Dou, Z.; Rogers, D.R.; Englehart, K.B. Continuous locomotion-mode identification for prosthetic legs based on neuromuscular-mechanical fusion. IEEE Trans. Biomed. Eng. 2011, 58, 2867–2875. [Google Scholar] [CrossRef]
- Lim, D.H.; Kim, W.S.; Kim, H.J.; Han, C.S. Development of real-time gait phase detection system for a lower extremity exoskeleton robot. Int. J. Precis. Eng. Manuf. 2017, 18, 681–687. [Google Scholar] [CrossRef]
- Altilio, R.; Paoloni, M.; Panella, M. Selection of clinical features for pattern recognition applied to gait analysis. Med. Biol. Eng. Comput. 2017, 55, 685–695. [Google Scholar] [CrossRef]
- Wang, F.; Yan, L.; Xiao, J. Human gait recognition system based on support vector machine algorithm and using wearable sensors. Sens. Mater. 2019, 31. [Google Scholar] [CrossRef]
- Lee, S.S.; Choi, S.T.; Choi, S.I. Classification of gait type based on deep learning using various sensors with smart insole. Sensors 2019, 19, 1757. [Google Scholar] [CrossRef]
- Perry, J.; Burnfield, J.M. Gait Analysis: Normal and Pathological Function.; SLACK, INC.: Thorefare, NJ, USA, 2010. [Google Scholar]
- SENIAM. The SENIAM Project. Available online: http://www.seniam.org/ (accessed on 11 March 2019).
- Park, S.W.; Lee, K.J.; Shin, D.C.; Shin, S.H.; Lee, M.M.; Song, C.H. The effect of underwater gait training on balance ability of stroke patients. J. Phys. Ther. Sci. 2014, 26, 899–903. [Google Scholar] [CrossRef] [PubMed]
- Kim, M.K.; Lee, S.A. Underwater treadmill training and gait ability in the normal adult. J. Phys. Ther. Sci. 2017, 29, 67–69. [Google Scholar] [CrossRef] [Green Version]
- Miyazaki, T.; Suzuki, H.; Morisaki, D.; Kanno, T.; Miyazaki, R.; Kawakami, Y.; Kawashima, K. Underwater walking using soft sensorless gait assistive suit. In Proceedings of the 2019 IEEE/SICE International Symposium on System Integration (SII), Paris, France, 14–16 January 2019; pp. 237–242. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Whole mechanism weight (kg) | 1.0 |
| PARM numbers | 8 |
| PARM weight (kg) | 7.0 × |
| PARM length (m) | 300 × |
| PARM inner diameter (m) | 9.5 × |
| Target torque (Nm) | 15 |
| Target contraction force of PARM (N) | 300 |
| (When pressure is supplied as 400 kPa) |
| Proportional gain (V/kPa) | 3.0 × |
| Integral gain (V/kPa s) | 7.0 × |
| Base pressure (kPa) | 0.0 |
| Target pressure (kPa) | 4.0 × |
| Threshold of pressure derivative (kPa/s) | 0.0 |
| Threshold of pressure (kPa) | −15 |
| Control frequency (Hz) | 5.0 × |
| Measuring frequency of EMG (Hz) | 5.0 × |
| Cut-off frequency of numerical | |
| differentiation of pressure (Hz) | 10 |
| Cut-off frequency | |
| of low-pass filter of pressure (Hz) | 10 |
| Upper limit of control voltage (V) | 9.8 |
| Lower limit of control voltage (V) | 0.2 |
| Upper limit of gait cycle time (s) | 5.0 |
| Walking step number n | |
| for calculating average gait cycle time | 4 |
| Detection timing in gait cycle time (%) | 55 |
| Pressurized time of TF PARMs (%) | 90–10 |
| Pressurized time of TB PARMs (%) | 80–10 |
| Pressurized time of CF PARMs (%) | 55–13 |
| Threshold of pressure derivative (kPa/s) | |
| Target walking rate [BPM] | 90 |
| Target gait cycle time (s) | |
| Non-detection time (s) |
| Height (m) | Weight (kg) | Pressure in CB PARMs (kPa) | |
|---|---|---|---|
| Trainee 1 | 1.71 | 72 | |
| Trainee 2 | 1.76 | 73 | |
| Trainee 3 | 1.75 | 74 | |
| Trainee 4 | 1.70 | 54 | |
| Trainee 5 | 1.61 | 68 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miyazaki, T.; Tagami, T.; Morisaki, D.; Miyazaki, R.; Kawase, T.; Kanno, T.; Kawashima, K. A Motion Control of Soft Gait Assistive Suit by Gait Phase Detection Using Pressure Information. Appl. Sci. 2019, 9, 2869. https://doi.org/10.3390/app9142869
Miyazaki T, Tagami T, Morisaki D, Miyazaki R, Kawase T, Kanno T, Kawashima K. A Motion Control of Soft Gait Assistive Suit by Gait Phase Detection Using Pressure Information. Applied Sciences. 2019; 9(14):2869. https://doi.org/10.3390/app9142869
Chicago/Turabian StyleMiyazaki, Tetsuro, Toshihiro Tagami, Daisuke Morisaki, Ryoken Miyazaki, Toshihiro Kawase, Takahiro Kanno, and Kenji Kawashima. 2019. "A Motion Control of Soft Gait Assistive Suit by Gait Phase Detection Using Pressure Information" Applied Sciences 9, no. 14: 2869. https://doi.org/10.3390/app9142869
APA StyleMiyazaki, T., Tagami, T., Morisaki, D., Miyazaki, R., Kawase, T., Kanno, T., & Kawashima, K. (2019). A Motion Control of Soft Gait Assistive Suit by Gait Phase Detection Using Pressure Information. Applied Sciences, 9(14), 2869. https://doi.org/10.3390/app9142869