Visualization of the Strain-Rate State of a Data Cloud: Analysis of the Temporal Change of an Urban Multivariate Description


Abstract
:1. Introduction
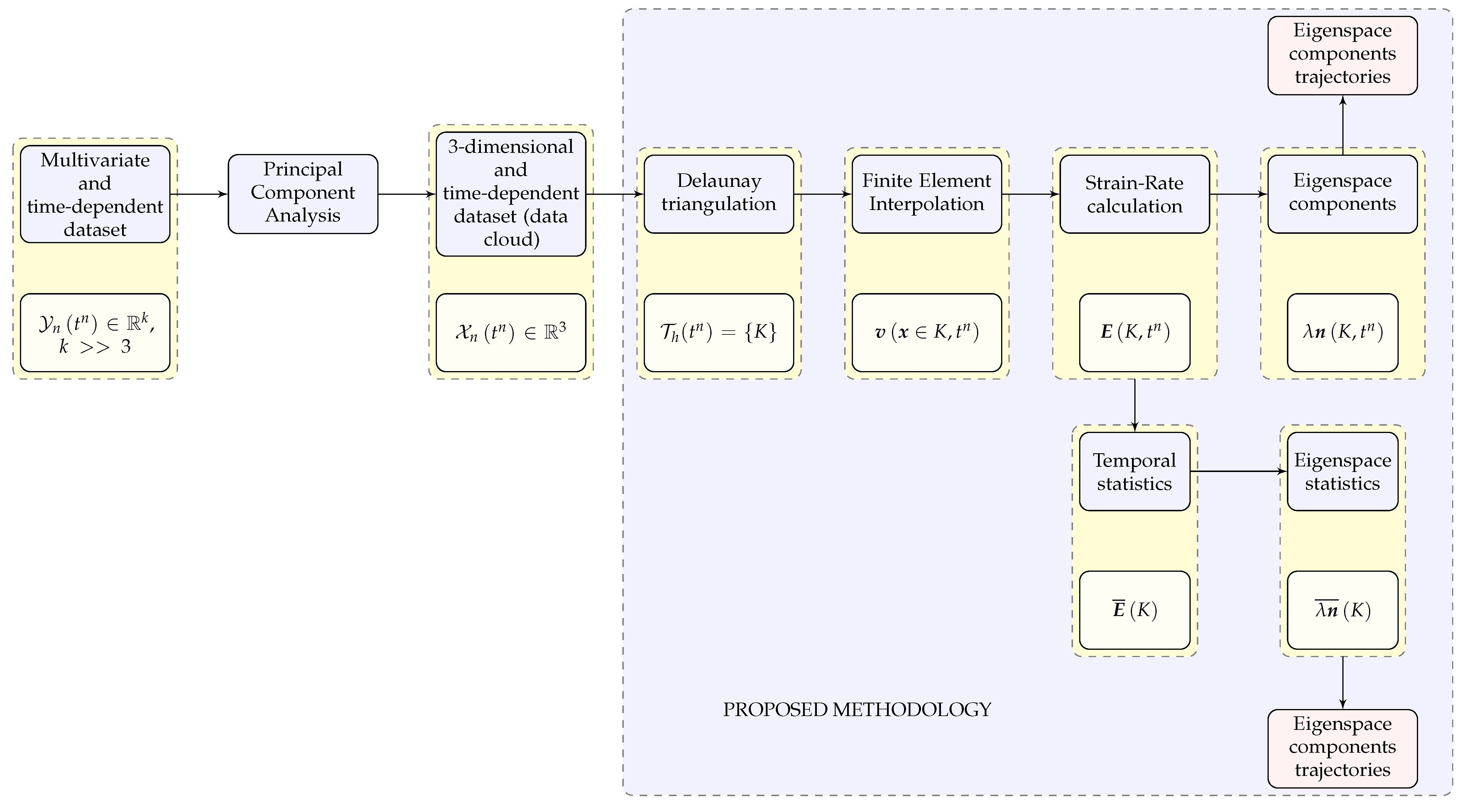
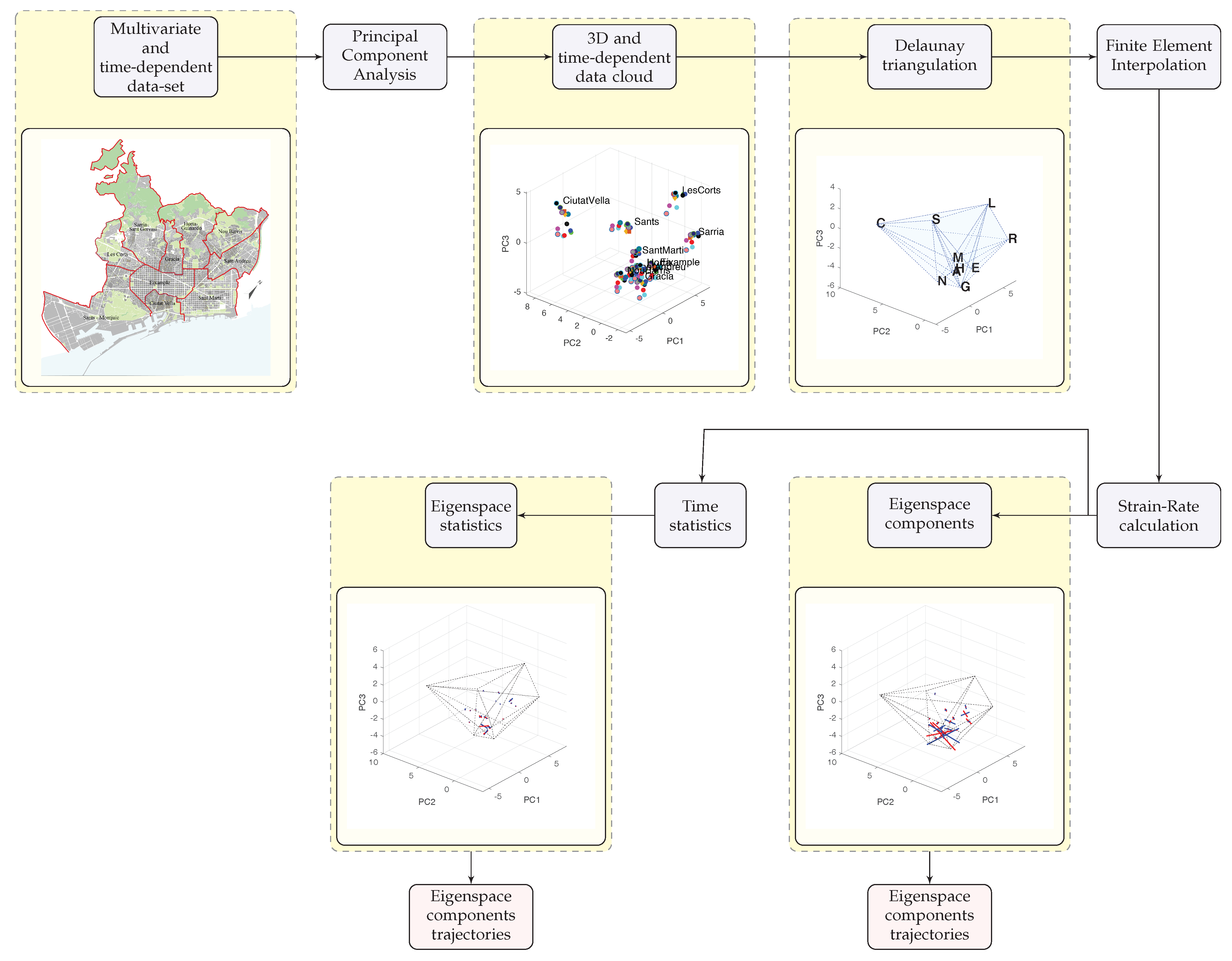
2. Methods
2.1. Time-Dependent Three-Dimensional Dataset
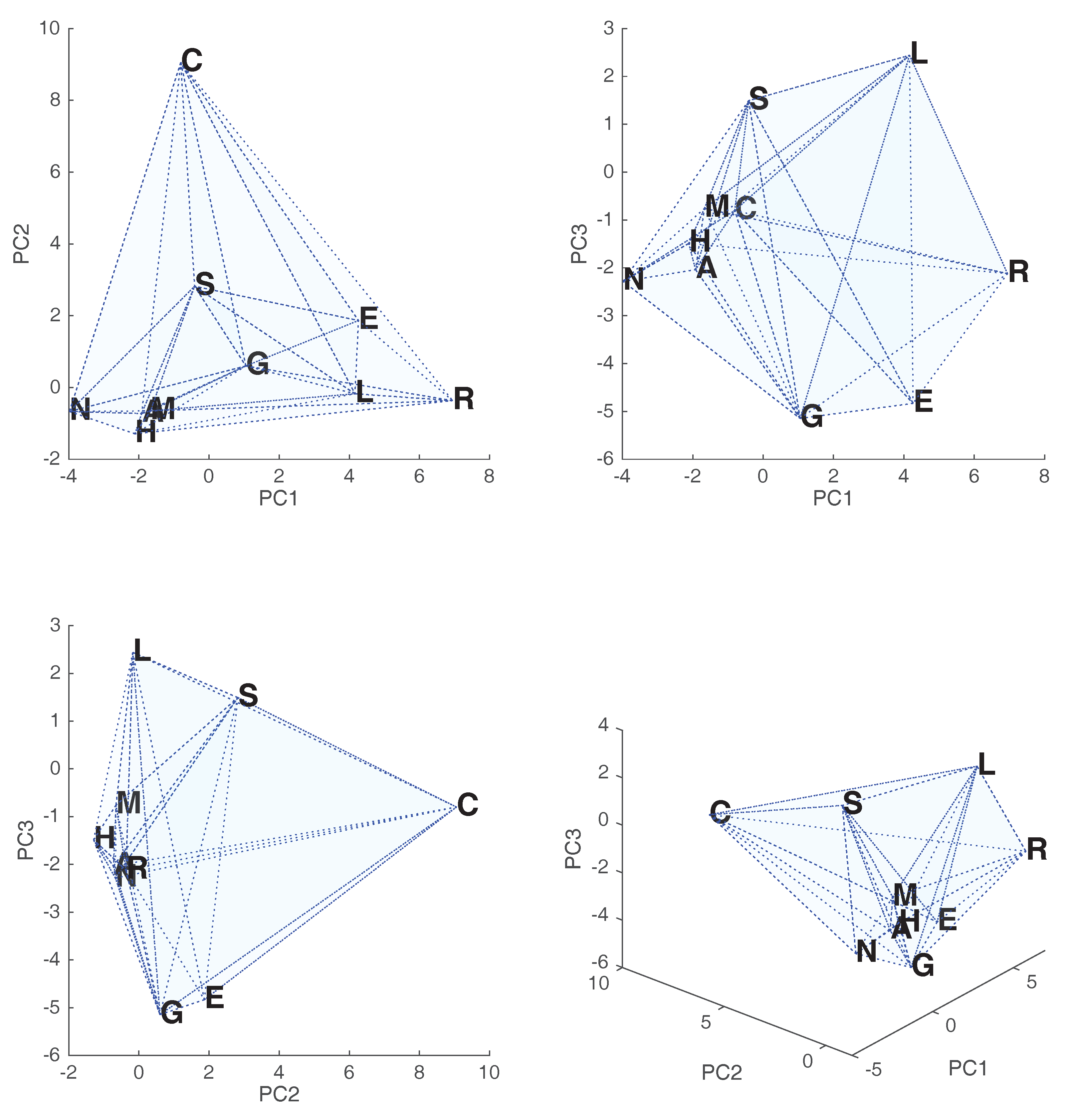
2.2. Finite Element Method Interpolation
2.3. Elemental Strain-Rate Calculation
2.4. Principal Strain-Rates
3. Results
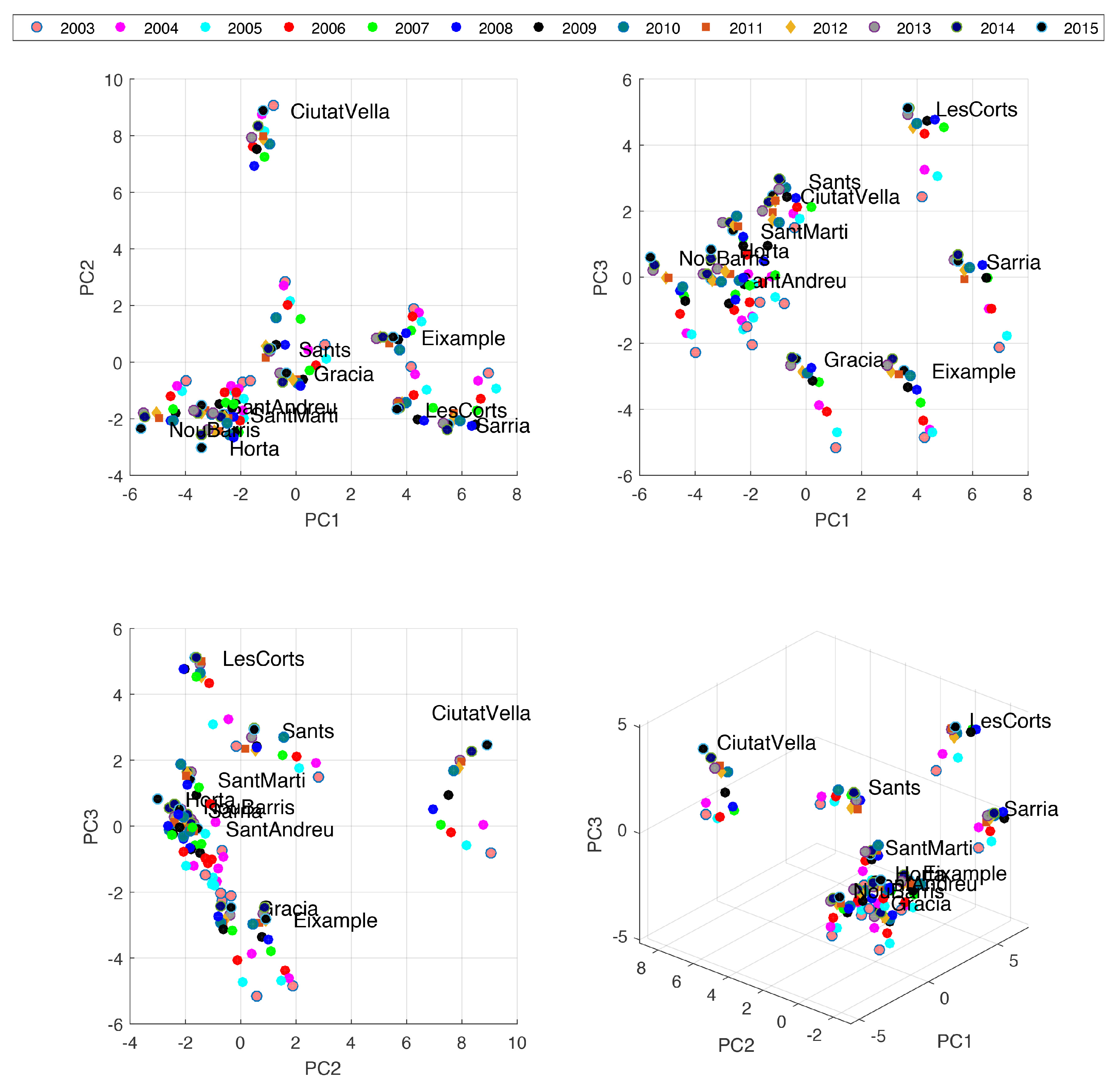
3.1. Time-Dependent Data Cloud from an Urban Multivariate Description
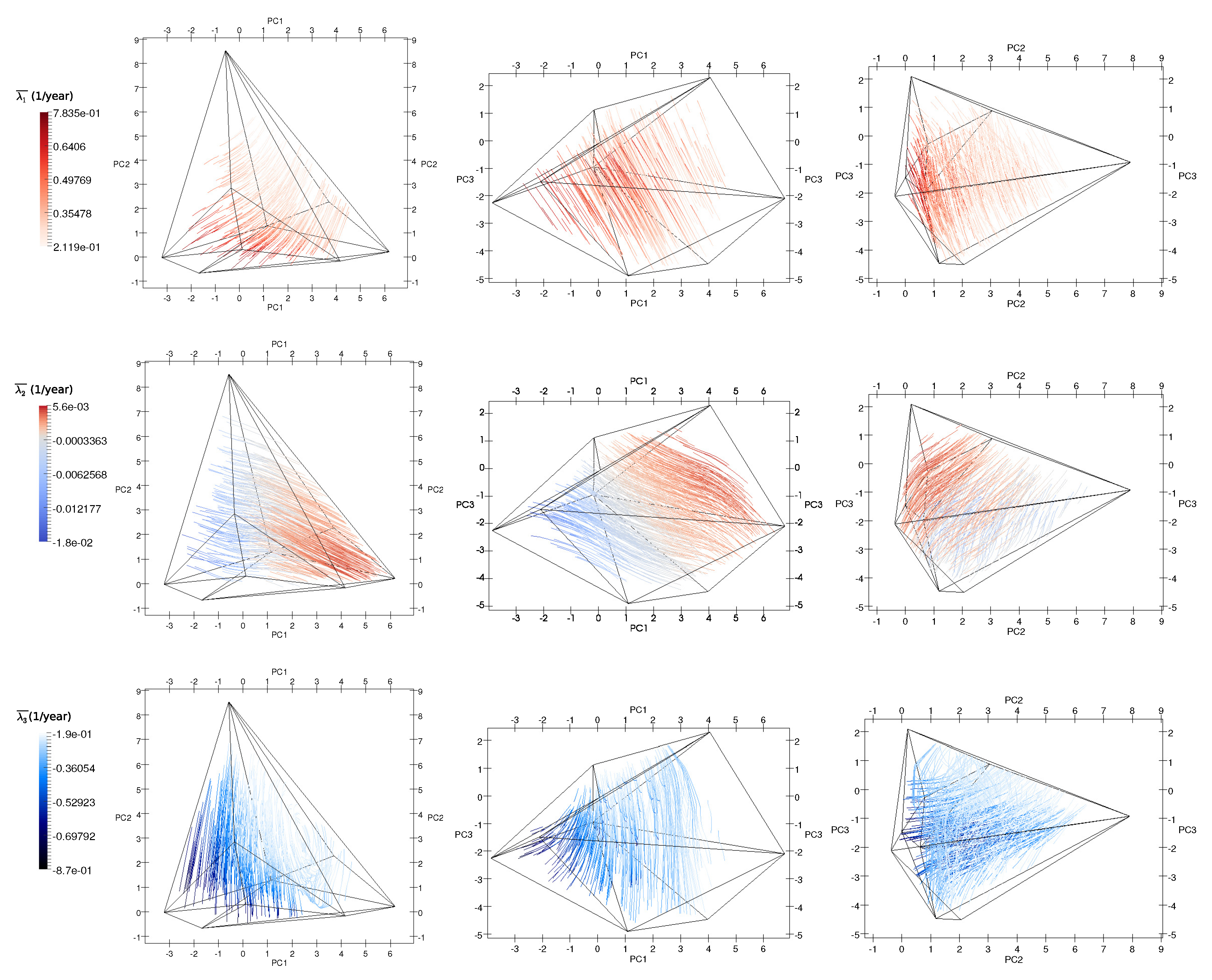
3.2. Principal Strain-Rates
Trajectory Patterns of the Principal Strain-Rates
3.3. Temporal Statistics of the Principal Strain-Rates
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ciutat Vella | Eixample | Gracia | |||||||
| Year | PC1 | PC2 | PC3 | PC1 | PC2 | PC3 | PC1 | PC2 | PC3 |
| 2003 | −0.8063 | 9.0563 | −0.8014 | 4.2613 | 1.8666 | −4.832 | 1.05 | 0.6006 | −5.1456 |
| 2004 | −1.2263 | 8.749 | 0.0207 | 4.444 | 1.7361 | −4.6018 | 0.4589 | 0.4104 | −3.8634 |
| 2005 | −1.1214 | 8.1463 | −0.5941 | 4.538 | 1.4541 | −4.6755 | 1.105 | 0.0923 | −4.7119 |
| 2006 | −1.5671 | 7.6138 | −0.1879 | 4.2079 | 1.6011 | −4.3598 | 0.7275 | −0.1042 | −4.0577 |
| 2007 | −1.1198 | 7.2281 | 0.0579 | 4.1476 | 1.0994 | −3.7909 | 0.4875 | −0.305 | −3.1769 |
| 2008 | −1.5106 | 6.9424 | 0.4942 | 3.9782 | 1.0165 | −3.4243 | 0.1741 | −0.8197 | −2.7533 |
| 2009 | −1.3956 | 7.5225 | 0.9368 | 3.685 | 0.7901 | −3.3483 | 0.2523 | −0.6319 | −3.1446 |
| 2010 | −0.9735 | 7.7025 | 1.6649 | 3.7625 | 0.4337 | −2.9882 | 0.0594 | −0.7371 | −2.9213 |
| 2011 | −1.2043 | 7.9648 | 1.9629 | 3.3624 | 0.6786 | −2.9333 | 0.0113 | −0.6152 | −2.9398 |
| 2012 | −1.195 | 7.8653 | 1.7417 | 3.0545 | 0.9032 | −2.8587 | −0.1365 | −0.5935 | −2.8493 |
| 2013 | −1.5913 | 7.9264 | 1.9916 | 2.9124 | 0.8291 | −2.6614 | −0.5758 | −0.3804 | −2.6808 |
| 2014 | −1.3629 | 8.3386 | 2.2818 | 3.1193 | 0.867 | −2.4646 | −0.4876 | −0.7186 | −2.4188 |
| 2015 | −1.2049 | 8.9012 | 2.4749 | 3.5172 | 0.8941 | −2.8168 | −0.3677 | −0.3717 | −2.4571 |
| Horta | Les Corts | Nou Barris | |||||||
| Year | PC1 | PC2 | PC3 | PC1 | PC2 | PC3 | PC1 | PC2 | PC3 |
| 2003 | −2.1138 | −1.2904 | −1.4894 | 4.1613 | −0.1746 | 2.4413 | −3.9792 | −0.6683 | −2.2832 |
| 2004 | −1.9348 | −1.6926 | −1.2007 | 4.2907 | −0.4407 | 3.246 | −4.3116 | −0.8449 | −1.6886 |
| 2005 | −1.9037 | −1.9865 | −1.2151 | 4.72 | −0.9836 | 3.0771 | −4.1319 | −1.0375 | −1.7496 |
| 2006 | −2.0135 | −2.068 | −0.7788 | 4.2483 | −1.1456 | 4.3327 | −4.5379 | −1.1949 | −1.1161 |
| 2007 | −2.0524 | −2.4994 | −0.2639 | 4.9414 | −1.5988 | 4.5201 | −4.4199 | −1.6649 | −0.5806 |
| 2008 | −2.2745 | −2.6368 | −0.0178 | 4.6463 | −2.081 | 4.7669 | −4.5522 | −2.0702 | −0.4074 |
| 2009 | −2.203 | −2.4633 | −0.2194 | 4.3805 | −2.0041 | 4.7494 | −4.3531 | −1.8088 | −0.7178 |
| 2010 | −2.3921 | −2.5868 | −0.1021 | 3.9936 | −1.4523 | 4.6517 | −4.4486 | −2.0712 | −0.3091 |
| 2011 | −2.751 | −2.4149 | 0.1039 | 3.6955 | −1.41 | 4.9955 | −4.9566 | −1.9717 | −0.0125 |
| 2012 | −2.94 | −2.4159 | 0.1586 | 3.8331 | −1.4371 | 4.5223 | −5.0669 | −1.7986 | −0.0275 |
| 2013 | −3.1722 | −2.3885 | 0.2543 | 3.6767 | −1.4507 | 4.9202 | −5.5219 | −1.7744 | 0.214 |
| 2014 | −3.4071 | −2.5664 | 0.5601 | 3.7339 | −1.6226 | 5.1188 | −5.4769 | −1.9184 | 0.3528 |
| 2015 | −3.4105 | −3.0084 | 0.8318 | 3.6617 | −1.6611 | 5.1225 | −5.5952 | −2.3473 | 0.6067 |
| Sant Andreu | Sant Marti | Sants | |||||||
| Year | PC1 | PC2 | PC3 | PC1 | PC2 | PC3 | PC1 | PC2 | PC3 |
| 2003 | −1.9206 | −0.7244 | −2.038 | −1.6692 | −0.6515 | −0.759 | −0.4118 | 2.8214 | 1.4929 |
| 2004 | −2.3282 | −0.8237 | −1.2921 | −2.0666 | −0.9143 | 0.1126 | −0.4382 | 2.7054 | 1.9119 |
| 2005 | −2.2532 | −1.0002 | −1.5723 | −1.8884 | −1.2945 | −0.2293 | −0.2215 | 2.1389 | 1.7699 |
| 2006 | −2.5938 | −1.0519 | −1.0073 | −2.1435 | −1.0797 | 0.6638 | −0.321 | 2.0008 | 2.104 |
| 2007 | −2.5244 | −1.4196 | −0.5319 | −2.2487 | −1.4918 | 1.1851 | 0.1661 | 1.5314 | 2.1307 |
| 2008 | −2.5551 | −1.8275 | −0.6822 | −2.2779 | −1.9199 | 1.2394 | −0.3843 | 0.6045 | 2.3897 |
| 2009 | −2.772 | −1.4689 | −0.812 | −2.2868 | −1.6089 | 0.9544 | −0.7046 | 0.5952 | 2.4362 |
| 2010 | −3.0476 | −1.8197 | −0.1474 | −2.4825 | −2.1435 | 1.8678 | −0.7341 | 1.5812 | 2.6913 |
| 2011 | −3.2915 | −1.7145 | −0.1452 | −2.4366 | −1.9662 | 1.5397 | −1.0958 | 0.1433 | 2.3358 |
| 2012 | −3.3955 | −1.8174 | −0.1092 | −2.5843 | −1.9311 | 1.5931 | −1.0935 | 0.5496 | 2.3024 |
| 2013 | −3.7081 | −1.7173 | 0.0948 | −3.0101 | −1.7819 | 1.6588 | −0.961 | 0.3743 | 2.6883 |
| 2014 | −3.5488 | −1.8093 | 0.0797 | −2.732 | −1.9099 | 1.6373 | −0.9836 | 0.4766 | 2.9893 |
| 2015 | −3.4406 | −1.5402 | −0.0642 | −2.6473 | −1.8349 | 1.4236 | −0.9148 | 0.4841 | 2.9255 |
| Sarria | |||||||||
| Year | PC1 | PC2 | PC3 | ||||||
| 2003 | 6.9446 | −0.3658 | −2.1205 | ||||||
| 2004 | 6.6038 | −0.6365 | −0.9552 | ||||||
| 2005 | 7.2135 | −0.9469 | −1.7803 | ||||||
| 2006 | 6.6584 | −1.2802 | −0.9586 | ||||||
| 2007 | 6.5343 | −1.7212 | −0.0213 | ||||||
| 2008 | 6.3394 | −2.261 | 0.3627 | ||||||
| 2009 | 6.4824 | −2.2093 | −0.0221 | ||||||
| 2010 | 5.9119 | −2.0589 | 0.2891 | ||||||
| 2011 | 5.7193 | −1.7978 | −0.0559 | ||||||
| 2012 | 5.716 | −2.0188 | 0.2245 | ||||||
| 2013 | 5.3182 | −2.1666 | 0.5166 | ||||||
| 2014 | 5.4857 | −2.3904 | 0.6632 | ||||||
| 2015 | 5.4919 | −2.1922 | 0.4949 | ||||||
References
- Fuchs, R.; Hauser, H. Visualization of multi-variate scientific data. In Computer Graphics Forum; Blackwell Publishing Ltd.: Oxford, UK, 2009; Volume 28, pp. 1670–1690. [Google Scholar]
- Salazar-Llano, L.; Rosas-Casals, M.; Ortego, M.I. An Exploratory Multivariate Statistical Analysis to Assess Urban Diversity. Sustainability 2019, 11, 3812. [Google Scholar] [CrossRef]
- White, F.M.; Corfield, I. Viscous Fluid Flow; McGraw-Hill: New York, NY, USA, 2006; Volume 3. [Google Scholar]
- Bower, A.F. Applied Mechanics of Solids; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- McLoughlin, T.; Laramee, R.S.; Peikert, R.; Post, F.H.; Chen, M. Over two decades of integration-based, geometric flow visualization. In Computer Graphics Forum; Blackwell Publishing Ltd.: Oxford, UK, 2010; Volume 29, pp. 1807–1829. [Google Scholar]
- Süßmuth, J.; Winter, M.; Greiner, G. Reconstructing animated meshes from time-varying point clouds. In Computer Graphics Forum; Blackwell Publishing Ltd.: Oxford, UK, 2008; Volume 27, pp. 1469–1476. [Google Scholar]
- Ustinin, M.N.; Kronberg, E.; Filippov, S.V.; Sytchev, V.V.; Sobolev, E.V.; Llinás, R. Kinematic visualization of human magnetic encephalography. Math. Biol. Bioinform. 2010, 5, 176–187. [Google Scholar]
- Wang, S.W.; Interrante, V.; Longmire, E. Multivariate visualization of 3D turbulent flow data. In Proceedings of the Visualization and Data Analysis 2010, San Jose, CA, USA, 17–21 January 2010; International Society for Optics and Photonics: Bellingham, WA, USA, 2010; Volume 7530, p. 75300N. [Google Scholar]
- Kohler, M.; Krzyżak, A. Nonparametric estimation of non-stationary velocity fields from 3D particle tracking velocimetry data. Comput. Stat. Data Anal. 2012, 56, 1566–1580. [Google Scholar] [CrossRef]
- Aguirre-Pablo, A.; Aljedaani, A.B.; Xiong, J.; Idoughi, R.; Heidrich, W.; Thoroddsen, S.T. Single-camera 3D PTV using particle intensities and structured light. Exp. Fluids 2019, 60, 25. [Google Scholar] [CrossRef] [Green Version]
- Keim, D.A. Information visualization and visual data mining. IEEE trans. Vis. Comput. Graphics 2002, 8, 1–8. [Google Scholar] [CrossRef]
- Gao, L.; Heath, D.G.; Kuszyk, B.S.; Fishman, E.K. Automatic liver segmentation technique for three-dimensional visualization of CT data. Radiology 1996, 201, 359–364. [Google Scholar] [CrossRef] [PubMed]
- Teplan, M. Fundamentals of EEG measurement. Meas. Sci. Rev. 2002, 2, 1–11. [Google Scholar]
- Wang, C.; Yu, H.; Ma, K.L. Importance-driven time-varying data visualization. IEEE Trans. Vis. Comput. Graphics 2008, 14, 1547–1554. [Google Scholar] [CrossRef]
- Husson, F.; Lê, S.; Pagès, J. Confidence ellipse for the sensory profiles obtained by principal component analysis. Food Quality Prefer. 2005, 16, 245–250. [Google Scholar] [CrossRef]
- Cadoret, M.; Husson, F. Construction and evaluation of confidence ellipses applied at sensory data. Food Quality Prefer. 2013, 28, 106–115. [Google Scholar] [CrossRef]
- Abdi, H.; Williams, L.J.; Valentin, D. Multiple factor analysis: principal component analysis for multitable and multiblock data sets. Wiley Int. Rev. Comput. Stat. 2013, 5, 149–179. [Google Scholar] [CrossRef]
- Werth, M.T.; Halouska, S.; Shortridge, M.D.; Zhang, B.; Powers, R. Analysis of metabolomic PCA data using tree diagrams. Anal. Biochem. 2010, 399, 58–63. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Worley, B.; Halouska, S.; Powers, R. Utilities for quantifying separation in PCA/PLS-DA scores plots. Anal. Biochem. 2013, 433, 102–104. [Google Scholar] [CrossRef] [PubMed]
- Wang, B.; Shi, W.; Miao, Z. Confidence analysis of standard deviational ellipse and its extension into higher dimensional Euclidean space. PLoS ONE 2015, 10, e0118537. [Google Scholar] [CrossRef] [PubMed]
- Josse, J.; Wager, S.; Husson, F. Confidence areas for fixed-effects pca. J. Comput. Graph. Stat. 2016, 25, 28–48. [Google Scholar] [CrossRef]
- Cederholm, P. Deformation analysis using confidence ellipsoids. Surv. Rev. 2003, 37, 31–45. [Google Scholar] [CrossRef]
- Mase, G.T.; Smelser, R.E.; Mase, G.E. Continuum Mechanics for Engineers; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Marsden, J.E.; Hughes, T.J. Mathematical Foundations of Elasticity; Courier Corporation: North Chelmsford, MA, USA, 1994. [Google Scholar]
- Xu, P.; Grafarend, E. Statistics and geometry of the eigenspectra of three-dimensional second-rank symmetric random tensors. Geophys. J. Int. 1996, 127, 744–756. [Google Scholar] [CrossRef]
- Wdowinski, S.; Sudman, Y.; Bock, Y. Geodetic detection of active faults in S. California. Geophys. Res. Lett. 2001, 28, 2321–2324. [Google Scholar] [CrossRef] [Green Version]
- Straub, C.; Kahle, H.G.; Schindler, C. GPS and geologic estimates of the tectonic activity in the Marmara Sea region, NW Anatolia. J. Geophys. Res. Solid Earth 1997, 102, 27587–27601. [Google Scholar] [CrossRef]
- Moin, P. Fundamentals of Engineering Numerical Analysis; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Hackl, M.; Malservisi, R.; Wdowinski, S. Strain rate patterns from dense GPS networks. Nat. Hazards Earth Syst. Sci. 2009, 9, 1177–1187. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Amini, A.A. Cardiac motion and deformation recovery from MRI: A review. IEEE Trans. Med Imaging 2012, 31, 487–503. [Google Scholar] [CrossRef] [PubMed]
- Pedrizzetti, G.; Sengupta, S.; Caracciolo, G.; Park, C.S.; Amaki, M.; Goliasch, G.; Narula, J.; Sengupta, P.P. Three-dimensional principal strain analysis for characterizing subclinical changes in left ventricular function. J. Am. Soc. Echocardiogr. 2014, 27, 1041–1050. [Google Scholar] [CrossRef] [PubMed]
- Cai, J.; Grafarend, E.W. Statistical analysis of geodetic deformation (strain rate) derived from the space geodetic measurements of BIFROST Project in Fennoscandia. J. Geodyn. 2007, 43, 214–238. [Google Scholar] [CrossRef]
- Cai, J.; Grafarend, E.W. Statistical analysis of the eigenspace components of the two-dimensional, symmetric rank-two strain rate tensor derived from the space geodetic measurements (ITRF92-ITRF2000 data sets) in central Mediterranean and Western Europe. Geophys. J. Int. 2007, 168, 449–472. [Google Scholar] [CrossRef] [Green Version]
- Mastrolembo, B.; Caporali, A. Stress and strain-rate fields: A comparative analysis for the Italian territory. Bollettino di Geofisica Teorica ed Applicata 2017, 58, 265–284. [Google Scholar]
- Houlie, N.; Woessner, J.; Giardini, D.; Rothacher, M. Lithosphere strain rate and stress field orientations near the Alpine arc in Switzerland. Sci. Rep. 2018, 8, 2018. [Google Scholar] [CrossRef] [Green Version]
- Su, X.; Yao, L.; Wu, W.; Meng, G.; Su, L.; Xiong, R.; Hong, S. Crustal deformation on the northeastern margin of the Tibetan plateau from continuous GPS observations. Remote Sens. 2019, 11, 34. [Google Scholar] [CrossRef]
- Sneddon, I.N. The distribution of stress in the neighbourhood of a crack in an elastic solid. Proc. R. Soc. Lond. Ser. Math. Phys. Sci. 1946, 187, 229–260. [Google Scholar]
- Williams, M. The bending stress distribution at the base of a stationary crack. Trans. ASME 1957, 79, 109–114. [Google Scholar] [CrossRef]
- Aktuğ, B.; Parmaksız, E.; Kurt, M.; Lenk, O.; Kılıçoğlu, A.; Gürdal, M.A.; Özdemir, S. Deformation of central anatolia: GPS implications. J. Geodyn. 2013, 67, 78–96. [Google Scholar] [CrossRef]
- Grafarend, E. Criterion matrices for deforming networks. In Optimization and Design of Geodetic Networks; Springer: Berlin/Heidelberg, Germany, 1985; pp. 363–428. [Google Scholar]
- Grafarend, E.W. Three-dimensional deformation analysis: Global vector spherical harmonic and local finite element representation. Tectonophysics 1986, 130, 337–359. [Google Scholar] [CrossRef]
- Dermanis, A.; Grafarend, E. The finite element approach to the geodetic computation of two-and three-dimensional deformation parameters: A study of frame invariance and parameter estimability. In Proceedings of the International Conference “Cartography-Geodesy”, Maracaibo, Venezuela, 24 November–3 December 1992. [Google Scholar]
- De Berg, M.; Van Kreveld, M.; Overmars, M.; Schwarzkopf, O. Computational geometry. In Computational Geometry; Springer: Berlin/Heidelberg, Germany, 1997; pp. 1–17. [Google Scholar]
- Marot, C.; Pellerin, J.; Remacle, J.F. One machine, one minute, three billion tetrahedra. Int. J. Numer. Methods Eng. 2019, 117, 967–990. [Google Scholar] [CrossRef]
- Gere, J.M.; Goodno, B.J. Mechanics of Materials, Brief Edition; Cengage Learning: Boston, MA, USA, 2012. [Google Scholar]
- Clemants, S.; Moore, G. Patterns of Species Diversity in Eight Northeastern United States Cities; Urban Habitats: Goodwood, Australia, 2003; Volume 1. [Google Scholar]
- Raudsepp-Hearne, C.; Peterson, G.D.; Bennett, E.M. Ecosystem service bundles for analyzing tradeoffs in diverse landscapes. Proc. Natl. Acad. Sci. USA 2010, 107, 5242–5247. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kaufman, L.; Rousseeuw, P.J. Finding Groups in Data: An Introduction to Cluster Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2009; Volume 344. [Google Scholar]
- Laliberté, E.; Legendre, P. A distance-based framework for measuring functional diversity from multiple traits. Ecology 2010, 91, 299–305. [Google Scholar] [CrossRef]
- Cha, S.H. Comprehensive survey on distance/similarity measures between probability density functions. City 2007, 1, 1. [Google Scholar]






| Element (id) | First Vertex | Second Vertex | Third Vertex | Fourth Vertex |
|---|---|---|---|---|
| 1 | Eixample | LesCorts | Gracia | Sarria |
| 2 | SantAndreu | Horta | SantMarti | NouBarris |
| 3 | Sants | SantAndreu | SantMarti | NouBarris |
| 4 | LesCorts | Eixample | Sants | CiutatVella |
| 5 | Gracia | SantMarti | Horta | Sarria |
| 6 | Gracia | SantMarti | Sarria | LesCorts |
| 7 | Eixample | Gracia | Sants | CiutatVella |
| 8 | CiutatVella | SantAndreu | Sants | NouBarris |
| 9 | Sarria | SantMarti | Horta | LesCorts |
| 10 | Gracia | SantAndreu | Sants | CiutatVella |
| 11 | Gracia | SantAndreu | CiutatVella | NouBarris |
| 12 | Sarria | Eixample | LesCorts | CiutatVella |
| 13 | Horta | SantAndreu | Gracia | NouBarris |
| 14 | SantAndreu | SantMarti | Horta | Gracia |
| 15 | LesCorts | Eixample | Gracia | Sants |
| 16 | LesCorts | Gracia | SantMarti | Sants |
| 17 | Gracia | SantAndreu | SantMarti | Sants |
| Element (id) | (year−1) | (year−1) | (year−1) | |||
|---|---|---|---|---|---|---|
| 1 | 0.53152326 | 0.03372761 | −0.5035305 | [−0.4030 −0.7620 0.5069] | [−0.8521 0.1104 −0.5116] | [0.3339 −0.6381 −0.6938] |
| 2 | 0.82703046 | −0.07233917 | −3.26208499 | [0.0599 0.4379 0.8970] | [0.9979 −0.0488 −0.0428] | [0.0250 0.8977 −0.4399] |
| 3 | 1.86537595 | 0.0239402 | −1.26311701 | [−0.2846 −0.7630 0.5804] | [0.8705 0.0479 0.4898] | [−0.4015 0.6447 0.6505] |
| 4 | 0.13368209 | 0.03257601 | −0.09645259 | [0.3448 0.0267 0.9383] | [0.6847 −0.6909 −0.2320] | [0.6421 0.7225 −0.2565] |
| 5 | 0.49758344 | 0.15637449 | −0.04820077 | [−0.2529 0.9667 0.0396] | [−0.3025 −0.1179 0.9458] | [0.9190 0.2272 0.3223] |
| 6 | 0.95472589 | 0.0373597 | −0.54006708 | [−0.0595 −0.8341 0.5484] | [0.9779 0.0616 0.1998] | [−0.2005 0.5482 0.8120] |
| 7 | 0.24389104 | −0.02462416 | −0.21220276 | [0.9802 −0.0490 −0.1918] | [0.0873 0.9766 0.1964] | [0.1777 −0.2093 0.9616] |
| 8 | 0.04516871 | −0.00558049 | −0.29509916 | [−0.5143 −0.5503 −0.6578] | [0.7221 −0.6916 0.0139] | [0.4626 0.4679 −0.7531] |
| 9 | 0.83841605 | 0.06226881 | −0.72504166 | [−0.4963 0.7789 0.3834] | [0.7282 0.1330 0.6723] | [−0.4727 −0.6128 0.6332] |
| 10 | 0.08250367 | −0.007911 | −0.1849469 | [−0.9511 0.1145 −0.2870] | [0.0253 −0.8969 −0.4415] | [−0.3079 −0.4272 0.8501] |
| 11 | 0.1403248 | −0.00962214 | −0.34760551 | [0.1721 −0.7223 −0.6698] | [0.9327 −0.0992 0.3467] | [0.3169 0.6844 −0.6566] |
| 12 | 0.28802797 | −0.02754418 | −0.54411227 | [−0.1025 −0.4296 −0.8972] | [0.6308 −0.7255 0.2753] | [0.7692 0.5377 −0.3453] |
| 13 | 5.25376147 | −0.1612729 | −2.63828711 | [−0.2599 −0.7733 0.5783] | [0.9210 −0.0187 0.3890] | [−0.2900 0.6338 0.7171] |
| 14 | 2.58304682 | 0.22953554 | −2.02948589 | [−0.4920 0.6994 0.5184] | [0.7802 0.0900 0.6190] | [−0.3863 −0.7091 0.5900] |
| 15 | 0.28104681 | 0.05995401 | −0.17975011 | [−0.6611 −0.5949 0.4572] | [−0.7488 0.4850 −0.4518] | [−0.0470 0.6410 0.7661] |
| 16 | 0.12268815 | 0.06554156 | −0.16290843 | [−0.0458 0.8952 −0.4432] | [0.9468 0.1805 0.2666] | [−0.3187 0.4074 0.8559] |
| 17 | 0.17492291 | 0.11156825 | −0.27224695 | [0.5895 −0.1016 0.8014] | [−0.2177 0.9354 0.2788] | [−0.7779 −0.3388 0.5292] |
| Element (id) | (year−1) | (year−1) | (year−1) | |||
|---|---|---|---|---|---|---|
| 1 | 0.1157 | −0.0086 | −0.0687 | [−0.4941 −0.4365 0.7519] | [0.1770 0.1339 −0.9751] | [0.1682 0.8390 0.5175] |
| 2 | 0.5087 | −0.0085 | −0.8859 | [−0.5777 0.5570 0.5966] | [−0.4259 −0.1592 −0.8907] | [−0.0636 −0.9309 0.3596] |
| 3 | 0.3919 | −0.0440 | −0.1662 | [−0.3746 −0.7054 0.6017] | [−0.9963 0.0335 0.0789] | [0.3127 −0.7926 −0.5234] |
| 4 | 0.0868 | 0.0041 | −0.0193 | [0.4684 0.8217 0.3247] | [−0.0619 0.3756 −0.9247] | [−0.7437 −0.4144 −0.5246] |
| 5 | 0.0435 | −0.0326 | −0.0659 | [−0.2319 0.8799 0.4148] | [−0.0891 −0.1728 0.9809] | [0.2229 −0.2816 −0.9333] |
| 6 | 0.1834 | 0.0096 | −0.0536 | [−0.2271 −0.8440 0.4859] | [−0.6281 0.2260 −0.7446] | [−0.4216 0.8544 0.3038] |
| 7 | 0.0647 | −0.0059 | −0.0485 | [0.5157 −0.6416 0.5678] | [0.0741 −0.9932 0.0893] | [0.2985 −0.4332 −0.8504] |
| 8 | 0.1436 | −0.0198 | −0.0174 | [−0.3994 −0.4110 0.8194] | [−0.1094 0.9614 −0.2525] | [0.3984 −0.8684 −0.2952] |
| 9 | 0.6311 | 0.0178 | −0.1144 | [−0.2472 −0.6917 0.6785] | [0.2277 0.2955 0.9278] | [0.1771 0.8523 0.4921] |
| 10 | 0.0355 | 0.0098 | −0.0745 | [0.4275 0.8923 −0.1449] | [0.8566 −0.5130 −0.0551] | [−0.5198 0.2220 −0.8249] |
| 11 | 0.0452 | −0.0239 | −0.1039 | [0.4742 −0.0948 0.8753] | [−0.7018 −0.6930 0.1650] | [−0.3132 −0.9345 −0.1693] |
| 12 | 0.2054 | 0.0336 | −0.0703 | [−0.5086 −0.8385 −0.1954] | [0.1867 0.6566 0.7307] | [0.0460 −0.4726 −0.8801] |
| 13 | 1.1642 | −0.0218 | −0.3192 | [−0.4080 −0.6299 0.6609] | [−0.9632 0.2605 0.0654] | [−0.5136 0.5798 −0.6325] |
| 14 | 0.1923 | 0.0415 | −0.2640 | [−0.4758 0.8168 0.3264] | [0.9570 0.2693 −0.1076] | [0.4308 −0.2715 −0.8606] |
| 15 | 0.0552 | 0.0085 | −0.0363 | [−0.2364 0.6160 0.7514] | [0.7518 0.2783 −0.5978] | [0.6817 0.6544 −0.3270] |
| 16 | 0.0438 | 0.0175 | −0.0059 | [0.2794 0.9257 −0.2549] | [0.8449 −0.2441 0.4760] | [−0.5430 −0.2892 −0.7883] |
| 17 | 0.2113 | −0.0196 | −0.3129 | [−0.0062 0.9656 0.2599] | [0.0760 0.2441 0.9668] | [0.0666 −0.9959 −0.0609] |
| Element(id) | Year | Year | ||||
|---|---|---|---|---|---|---|
| 1 | 0.5315 | 2003 | [−0.4030 −0.7620 0.5069] | −0.5035 | 2003 | [0.3339 −0.6381 −0.6938] |
| 2 | 2.0893 | 2010 | [−0.5094 0.8338 0.2130] | −3.2621 | 2003 | [0.0250 0.8977 −0.4399] |
| 3 | 3.0249 | 2009 | [−0.0766 −0.8956 0.4383] | −1.2631 | 2003 | [−0.4015 0.6447 0.6505] |
| 4 | 0.4860 | 2010 | [0.5309 0.8024 0.2724] | −0.1901 | 2005 | [0.8017 0.5583 −0.2134] |
| 5 | 0.6321 | 2014 | [0.0691 0.9893 −0.1286] | −0.3019 | 2010 | [−0.3219 0.5283 0.7857] |
| 6 | 1.1842 | 2006 | [0.1651 −0.9360 0.3110] | −0.9833 | 2005 | [0.2453 −0.7335 −0.6338] |
| 7 | 0.2772 | 2010 | [0.0108 −0.9360 0.3518] | −0.2122 | 2003 | [0.1777 −0.2093 0.9616] |
| 8 | 0.5104 | 2010 | [−0.4614 −0.6584 0.5946] | −0.5374 | 2009 | [−0.2484 −0.6025 0.7585] |
| 9 | 4.3858 | 2010 | [−0.2509 −0.6991 0.6696] | -2.4530 | 2010 | [0.4203 −0.7018 −0.5752] |
| 10 | 0.3753 | 2010 | [−0.4800 0.8570 −0.1874] | −0.3477 | 2009 | [0.4401 −0.6943 0.5695] |
| 11 | 0.5210 | 2009 | [−0.0542 0.3205 0.9457] | −0.5164 | 2009 | [0.3738 0.8847 −0.2784] |
| 12 | 1.5272 | 2008 | [−0.6804 −0.7328 0.0027] | −0.7379 | 2007 | [0.4304 0.8624 −0.2666] |
| 13 | 5.2538 | 2003 | [−0.2599 −0.7733 0.5783] | −4.6094 | 2008 | [0.2022 −0.9445 0.2588] |
| 14 | 2.5830 | 2003 | [−0.4920 0.6994 0.5184] | −2.0295 | 2003 | [−0.3863 −0.7091 0.5900] |
| 15 | 0.2810 | 2003 | [−0.6611 −0.5949 0.4572] | −0.4221 | 2010 | [0.0927 −0.9519 −0.2919] |
| 16 | 0.2659 | 2009 | [0.4571 0.7618 −0.4591] | −0.1636 | 2012 | [−0.5501 0.7352 0.3961] |
| 17 | 1.4269 | 2009 | [−0.0935 0.9952 0.0288] | −1.1715 | 2010 | [0.1262 0.9888 0.0798] |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Salazar-Llano, L.; Bayona-Roa, C. Visualization of the Strain-Rate State of a Data Cloud: Analysis of the Temporal Change of an Urban Multivariate Description. Appl. Sci. 2019, 9, 2920. https://doi.org/10.3390/app9142920
Salazar-Llano L, Bayona-Roa C. Visualization of the Strain-Rate State of a Data Cloud: Analysis of the Temporal Change of an Urban Multivariate Description. Applied Sciences. 2019; 9(14):2920. https://doi.org/10.3390/app9142920
Chicago/Turabian StyleSalazar-Llano, Lorena, and Camilo Bayona-Roa. 2019. "Visualization of the Strain-Rate State of a Data Cloud: Analysis of the Temporal Change of an Urban Multivariate Description" Applied Sciences 9, no. 14: 2920. https://doi.org/10.3390/app9142920
APA StyleSalazar-Llano, L., & Bayona-Roa, C. (2019). Visualization of the Strain-Rate State of a Data Cloud: Analysis of the Temporal Change of an Urban Multivariate Description. Applied Sciences, 9(14), 2920. https://doi.org/10.3390/app9142920