A Sparse Model of Guided Wave Tomography for Corrosion Mapping in Structure Health Monitoring Applications

Abstract
:1. Introduction
2. Model for Ultrasonic Guided Wave Ray Tomography
2.1. Conventional Model
2.2. A Sparse Model
2.3. Solution of the Sparse Model
3. Experimental Setup
4. Experimental Results
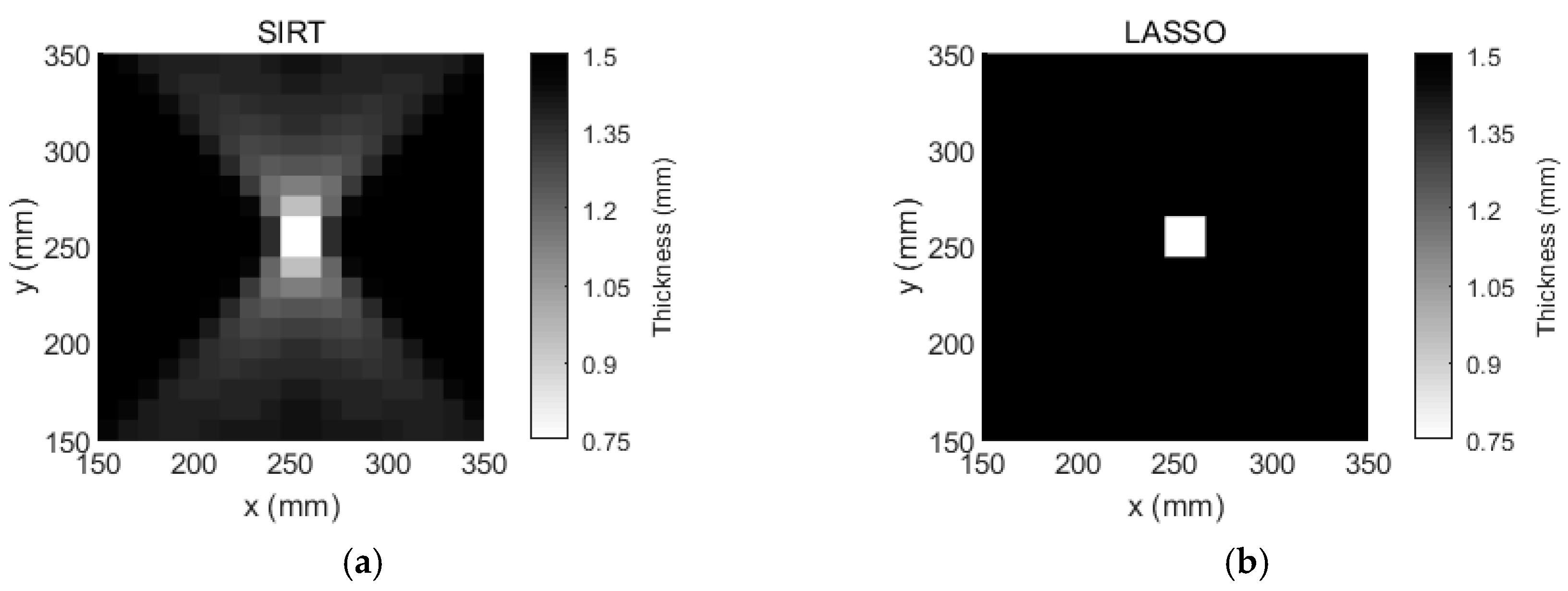
4.1. Single Regular Defect
4.2. Two Regular Defects
4.3. Two Partiall
5. Discussion
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Brath, A.J.; Simonetti, F.; Nagy, P.B.; Instanes, G. Experimental Validation of a Fast Forward Model for Guided Wave Tomography of Pipe Elbows. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2017, 64, 859–871. [Google Scholar] [CrossRef]
- Li, M.-L.; Deng, M.-X.; Gao, G.-J.; Chen, H.; Xiang, Y.-X. Influence of Change in Inner Layer Thickness of Composite Circular Tube on Second-Harmonic Generation by Primary Circumferential Ultrasonic Guided Wave Propagation. Chin. Phys. Lett. 2017, 34, 64302. [Google Scholar] [CrossRef]
- Poddar, B.; Giurgiutiu, V. Detectability of Crack Lengths from Acoustic Emissions Using Physics of Wave Propagation in Plate Structures. J. Nondestruct. Eval. 2017, 36, 36–41. [Google Scholar] [CrossRef]
- Zhao, X.; Rose, J.L. Ultrasonic guided wave tomography for ice detection. Ultrasonics 2016, 67, 212–219. [Google Scholar] [CrossRef]
- Golato, A.; Santhanam, S.; Amin, M.G. Multimodal exploitation and sparse reconstruction for guided-wave structural health monitoring. In Proceedings of the SPIE Sensing Technology + Applications, Baltimore, MD, USA, 19–22 May 2015. [Google Scholar]
- Zhang, H.; Chen, X.; Cao, Y.; Yu, J. Focusing of Time Reversal Lamb Waves and Its Applications in Structural Health Monitoring. Chin. Phys. Lett. 2010, 27, 104301. [Google Scholar]
- Brath, A.J.; Simonetti, F.; Nagy, P.B.; Instanes, G. Guided Wave Tomography of Pipe Bends. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2017, 64, 847–858. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Li, D.; Zhou, Z. Time reversal method for guidedwaves with multimode and multipath on corrosion defect detection in wire. Appl. Sci. 2017, 7, 424. [Google Scholar] [CrossRef]
- Lin, J.; Gao, F.; Luo, Z.; Zeng, L. High-Resolution Lamb Wave Inspection in Viscoelastic Composite Laminates. IEEE Trans. Ind. Electron. 2016, 63, 6989–6998. [Google Scholar] [CrossRef]
- Li, W.; Cho, Y. Combination of nonlinear ultrasonics and guided wave tomography for imaging the micro-defects. Ultrasonics 2016, 65, 87–95. [Google Scholar] [CrossRef]
- Xu, K.; Ta, D.; Hu, B.; Laugier, P.; Wang, W. Wideband dispersion reversal of lamb waves. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2014, 61, 997–1005. [Google Scholar] [CrossRef]
- Cawley, P.; Cegla, F.; Stone, M. Corrosion Monitoring Strategies-Choice Between Area and Point Measurements. J. Nondestruct. Eval. 2013, 32, 156–163. [Google Scholar] [CrossRef]
- Ciampa, F.; Scarselli, G.; Pickering, S.; Meo, M. Nonlinear elastic wave tomography for the imaging of corrosion damage. Ultrasonics 2015, 62, 147–155. [Google Scholar] [CrossRef] [Green Version]
- Rao, J.; Ratassepp, M.; Fan, Z. Limited-view ultrasonic guided wave tomography using an adaptive regularization method. J. Appl. Phys. 2016, 120, 194902. [Google Scholar] [CrossRef]
- Lee, C.; Kang, D.; Park, S. Visualization of Fatigue Cracks at Structural Members using a Pulsed Laser Scanning System. Res. Nondestruct. Eval. 2014, 26, 123–132. [Google Scholar] [CrossRef]
- Kersemans, M.; Martens, A.; Abeele, K.V.D.; Degrieck, J.; Zastavnik, F.; Pyl, L.; Sol, H.; Van Paepegem, W. Detection and Localization of Delaminations in Thin Carbon Fiber Reinforced Composites with the Ultrasonic Polar Scan. J. Nondestruct. Eval. 2014, 33, 522–534. [Google Scholar] [CrossRef]
- Huthwaite, P. Evaluation of inversion approaches for guided wave thickness mapping. Proc. R. Soc. A Math. Phys. Eng. Sci. 2014, 470, 20140063. [Google Scholar] [CrossRef] [Green Version]
- Leonard, K.R.; Hinders, M.K. Lamb wave tomography of pipe-like structures. Ultrasonics 2005, 43, 574–583. [Google Scholar] [CrossRef]
- Willey, C.L.; Simonetti, F. A two-dimensional analysis of the sensitivity of a pulse first break to wave speed contrast on a scale below the resolution length of ray tomography. J. Acoust. Soc. Am. 2016, 139, 3145–3158. [Google Scholar] [CrossRef]
- Belanger, P.; Cawley, P.; Simonetti, F. Guided wave diffraction tomography within the born approximation. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2010, 57, 1405–1418. [Google Scholar] [CrossRef]
- Chan, E.; Rose, L.F.; Wang, C.H. An extended diffraction tomography method for quantifying structural damage using numerical Green’s functions. Ultrasonics 2015, 59, 1–13. [Google Scholar] [CrossRef]
- Huthwaite, P.; Simonetti, F. High-resolution guided wave tomography. Wave Motion 2013, 50, 979–993. [Google Scholar] [CrossRef]
- Rao, J.; Ratassepp, M.; Fan, Z. Guided Wave Tomography Based on Full Waveform Inversion. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2016, 63, 737–745. [Google Scholar] [CrossRef]
- Rao, J.; Ratassepp, M.; Fan, Z. Investigation of the reconstruction accuracy of guided wave tomography using full waveform inversion. J. Sound Vib. 2017, 400, 317–328. [Google Scholar] [CrossRef]
- Rao, J.; Ratassepp, M.; Fan, Z. Quantification of thickness loss in a liquid-loaded plate using ultrasonic guided wave tomography. Smart Mater. Struct. 2017, 26, 125017. [Google Scholar] [CrossRef]
- Rao, J.; Ratassepp, M.; Lisevych, D.; Caffoor, M.H.; Fan, Z. On-Line Corrosion Monitoring of Plate Structures Based on Guided Wave Tomography Using Piezoelectric Sensors. Sensors 2017, 17, 2882. [Google Scholar] [CrossRef]
- Rosalie, C.; Chan, A.; Chiu, W.; Galea, S.; Rose, F.; Rajic, N. Structural health monitoring of composite structures using stress wave methods. Compos. Struct. 2005, 67, 157–166. [Google Scholar] [CrossRef]
- Zhang, H.Y.; Yu, J.B.; Chen, X.H. Guided Wave Tomography Using Simultaneous Iterative Reconstruction Technique Improved by Genetic Algorithm. Appl. Mech. Mater. 2011, 94, 1607–1610. [Google Scholar] [CrossRef]
- Xu, K.; Minonzio, J.-G.; Ta, D.; Hu, B.; Wang, W.; Laugier, P. Sparse SVD Method for High-Resolution Extraction of the Dispersion Curves of Ultrasonic Guided Waves. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2016, 63, 1514–1524. [Google Scholar] [CrossRef] [Green Version]
- Xu, K.; Laugier, P.; Minonzio, J.G. Dispersive Radon Transform. J. Acoust. Soc. Am. 2018, 143, 2729. [Google Scholar] [CrossRef]
- Xu, K.; Ta, D.; Moilanen, P.; Wang, W. Mode separation of Lamb waves based on dispersion compensation method. J. Acoust. Soc. Am. 2012, 131, 2714–2722. [Google Scholar] [CrossRef]
- Marchi, L.D.; Moll, J.; Marzani, A. A Sparsity Promoting Algorithm for Time of Flight Estimation in Guided Waves—Based SHM. In Proceedings of the EWSHM—7th European Workshop on Structural Health Monitoring, Nantes, France, 8–11 July 2014. [Google Scholar]
- Fomel, S. Traveltime Computation with the Linearized Eikonal Equation. Geophys. Prospect. 2013, 50, 373–382. [Google Scholar]
- Tibshirani, R. Regression Shrinkage and Selection via the Lasso. J. R. Stat. Soc. 2011, 73, 267–288. [Google Scholar] [CrossRef]
- Fu, W.J. Penalized Regressions: The Bridge versus the Lasso. J. Comput. Graph. Stat. 1998, 7, 397. [Google Scholar]
- Hastie, T.; Tibshirani, R.; Wainwright, M. Statistical Learning with Sparsity: The Lasso and Generalizations; Chapman & Hall/CRC: Boca Raton, FL, USA, 2015; pp. 156–157. [Google Scholar]
- Grant, M.C.; Boyd, S.P. Graph Implementations for Nonsmooth Convex Programs. Lect. Notes Control Inf. Sci. 2008, 371, 95–110. [Google Scholar]
- Grant, M.C.; Boyd, S.P. CVX: Matlab Software for Disciplined Convex Programming. 2014. [Google Scholar]
- Oraintara, S.; Karl, W.C.; Castanon, D.A.; Nguyen, T.Q. A method for choosing the regularization parameter in generalized Tikhonov regularized linear inverse problems. In Proceedings of the 2000 International Conference on Image Processing, Vancouver, BC, Canada, 10–13 September 2000. [Google Scholar]
- Hinders, M.K.; Hou, J.; Leonard, K.R. Multi-Mode Lamb Wave Arrival Time Extraction for Improved Tomographic Reconstruction. AIP Conf. Proc. 2005, 760, 736–743. [Google Scholar]
- Zou, H.; Hastie, T. Regularization and Variable Selection via the Elastic Net. J. R. Stat. Soc. 2005, 67. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid Density | The Number of Grids Covered by the Actual Corrosion Area | The Number of Grids Calculated by the SIRT | The Number of Grids Calculated by the Proposed Method |
|---|---|---|---|
| 20 × 20 | 4 | 32 | 4 |
| 40 × 40 | 12 | 68 | 12 |
| 60 × 60 | 32 | 132 | 32 |
| 80 × 80 | 52 | 456 | 56 |
| Grid Density | The Number of Grids Covered by the Actual Corrosion Area | The Number of Grids Calculated by the SIRT | The Number of Grids Calculated by the Proposed Method |
|---|---|---|---|
| 20 × 20 | 8 | 42 | 8 |
| 40 × 40 | 24 | 104 | 24 |
| 60 × 60 | 64 | 220 | 64 |
| 80 × 80 | 104 | 492 | 98 |
| Grid Density | Experiment I | Experiment II | Experiment III | |||
|---|---|---|---|---|---|---|
| SIRT | Proposed | SIRT | Proposed | SIRT | Proposed | |
| 20 × 20 | 0.01 | 0.54 | 0.01 | 0.56 | 0.01 | 0.60 |
| 40 × 40 | 0.02 | 0.64 | 0.02 | 0.65 | 0.02 | 0.70 |
| 60 × 60 | 0.11 | 0.74 | 0.11 | 0.77 | 0.11 | 0.80 |
| 80 × 80 | 0.14 | 0.84 | 0.14 | 0.82 | 0.14 | 0.89 |
| Transducer Density | The Maximum Grid Density | N2/M2 |
|---|---|---|
| 5 × 5 | 22 × 22 | 19.36 |
| 10 × 10 | 38 × 38 | 14.44 |
| 20 × 20 | 80 × 80 | 16 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Zhang, J.Q. A Sparse Model of Guided Wave Tomography for Corrosion Mapping in Structure Health Monitoring Applications. Appl. Sci. 2019, 9, 3126. https://doi.org/10.3390/app9153126
Gao Y, Zhang JQ. A Sparse Model of Guided Wave Tomography for Corrosion Mapping in Structure Health Monitoring Applications. Applied Sciences. 2019; 9(15):3126. https://doi.org/10.3390/app9153126
Chicago/Turabian StyleGao, Yu, and Jian Qiu Zhang. 2019. "A Sparse Model of Guided Wave Tomography for Corrosion Mapping in Structure Health Monitoring Applications" Applied Sciences 9, no. 15: 3126. https://doi.org/10.3390/app9153126
APA StyleGao, Y., & Zhang, J. Q. (2019). A Sparse Model of Guided Wave Tomography for Corrosion Mapping in Structure Health Monitoring Applications. Applied Sciences, 9(15), 3126. https://doi.org/10.3390/app9153126