1. Introduction
Nowadays, society’s concern about the impact of activities is rising, not only their economic influence, but also the environmental impact. The construction sector is one of the most carbon intensive industries [
1] due to the need for large amounts of materials and, henceforth, large amounts of natural resources. Therefore, researchers are investigating how to achieve cost efficient and environmentally sustainable processes for the construction industry. The term sustainable development was introduced for the first time by the Brundtland Commission, defining it as, “development that meets the needs of the present without compromising the ability of future generations to meet their own needs” [
2]. Since then, countries have been raising awareness about the compromise to the future generations, modifying their policies and demanding cheaper, ecofriendly constructions, without forgetting their safety and durability. In essence, the demands of the governments are to reach solutions that reduce their impact on the three main pillars: the economy, the environment, and society.
These demands translate into restrictions for constructors and designer. The former need to carry out the constructions with new strategies to improve sustainability, while the designers have to conceive their projects in a cheaper, ecofriendly way. This means profiting the materials and taking maximum advantage of their characteristics, and maintaining durability and safety.
The traditional recommendation for the designers is to take a starting point for their designs. Furthermore, there are lots of strict codes and regulations to ensure the safe and reliability of constructions, mostly on the structure field. There are many codes, which define bridge loads [
3] and concrete, steel, and composite bridge design [
4,
5,
6]. In the same way, the European Committee for Standardization (CEN) has advertised regulations related to structural bridge design [
7,
8,
9] as has the American Association of State Highway and Transportation Officials (AASHTO) [
10]. In addition, authors have been working to provide proper box-girder bridge designs [
11]. This search for optimal structures has led researchers to search for new forms of design, minimizing structural weight [
12] and economic cost [
13].
Since the first relevant works carried out in the field of structural optimization [
14,
15], the interest in the application of these techniques has grown a great deal, due to the different structural typologies studied (steel structures [
16], reinforced or pre-stressed concrete structures [
17,
18], or composite structures [
19,
20,
21,
22,
23,
24]), as well as for the methods and algorithms used [
25,
26]. However, researchers have focused, to a large extent, on the cost optimization of these types of structures. Some researchers have stated that there is a relationship between the cost and environmental optimization, and cost optimization is a good approach for the environmental one [
27].
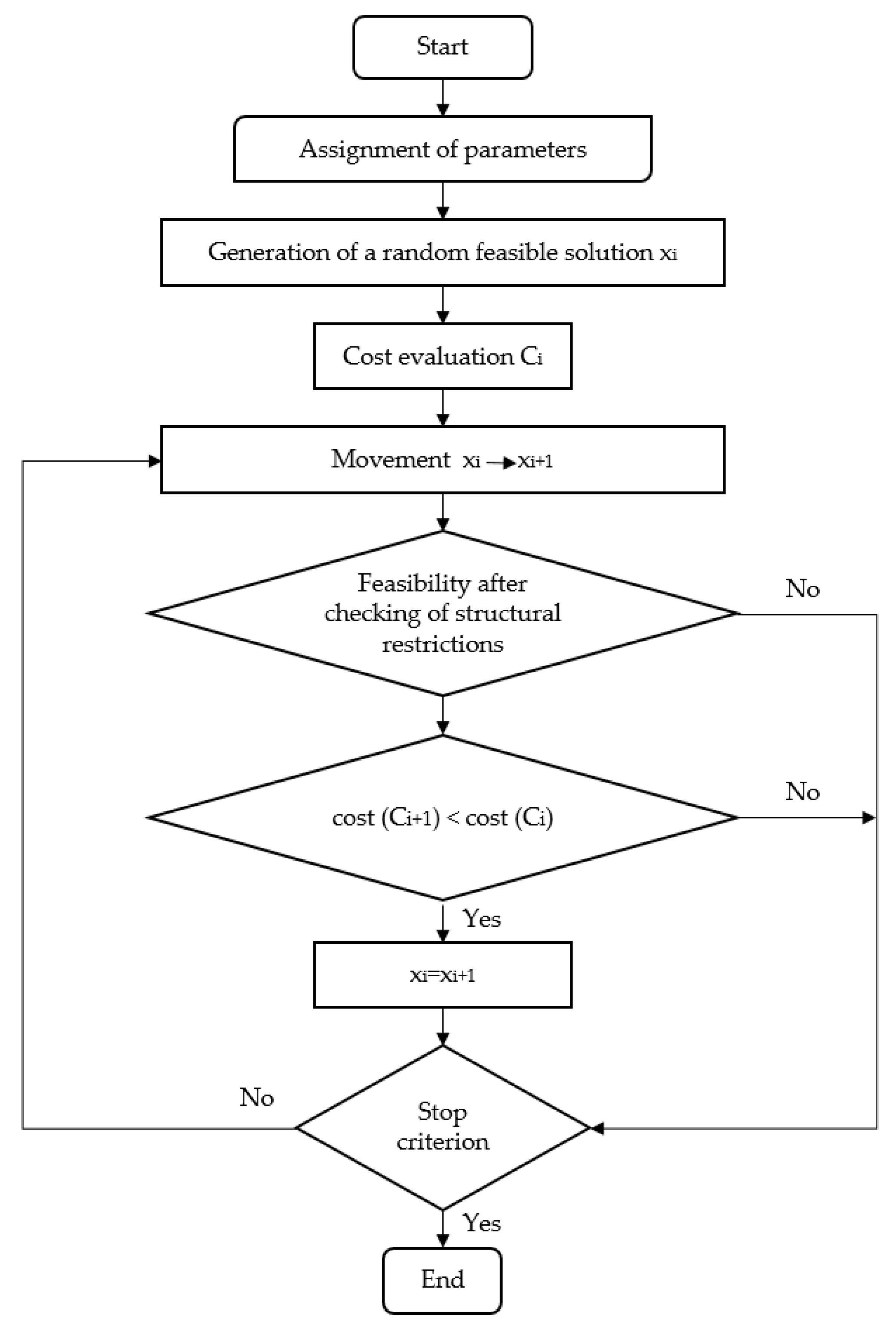
Optimization looks to find the values of the parameters that define the problem that allow us to find the optimal solution. In the structural field, the problems tend to have too many variables to analyze all the possible solutions. Therefore, the use of approximate methods that allow us to reach optimal solutions have been studied. Research about heuristics and metaheuristics has been performed recently [
28], such as neural networks [
29], Hybrid Harmony Search [
30], genetic algorithms [
31,
32], or simulated annealing [
25,
26]. Other authors have applied accelerated optimization methods, like kriging [
33], allowing to simplify the main structural problems.
Some researchers have already applied the multi-criteria optimization for bridge design [
34], considering other factors, besides the cost, like the security of the infrastructure and the CO
2 emissions [
27], the embodied energy [
35], or the lifetime reliability [
36]. However, these multi-criteria methods have not been applied to composite bridges. Other researchers, such Penadés-Plà et al. [
37], have done a review of multi-criteria decision-making methods to evaluate sustainable bridge designs. Nevertheless, if we focused on composite bridges there is a lack of knowledge.
In recent years, databases measuring the environmental impact of materials have been elaborated, because of the importance of incorporating the design criteria to consider the impact on CO
2 emissions [
38,
39,
40]. Many researchers, such as Yepes et al. [
41] and Molina-Moreno et al. [
42], have used these databases to study the difference between the cost and the CO
2 emission optimization for reinforced concrete (RC) structures.
The objective of this research was to study the differences between three heuristic optimization techniques applied to a steel-concrete composite pedestrian bridge. Furthermore, the differences between the CO2 emissions associated with the material amounts obtained from each heuristic were analyzed and compared with the original structural design. Finally, a parametric study, according to the span length, was performed.
2. Optimization Problem Definition
The problem proposed in this study is a single-objective optimization of a composite pedestrian bridge. To reach this purpose, a program that determined the optimum values of the variables was created. The objective was to minimize the objective function associated with the cost (1), satisfying the constraints imposed on the problem, represented by the Equation (2):
where vector
x contains the design variables. To adjust the variables to real cases, these are discrete. The total cost objective function is given in Equation (1), where
pi is the prices of every construction unit and
mi the measurements obtained by the design variables. For example, for a random structure, the vector
x would contain the design variables of that random structure,
mi would contain the amount of materials associated with these variables, and these measurements, multiplied by their unit prices (
pi), result in the total cost of the structure.
The values of cost for each variable contains the materials, labor and machinery. Because of the characteristics of the construction materials, the maintenance was not taken into account in this study. The construction place assumed in this paper was Valencia. The construction units included in this study (rc) were the volume of concrete, the amount of reinforcement steel, the amount of rolled steel, and the amount of shear-connector’s steel.
The unit prices of the materials were taken from the price table of the College of Civil Engineers of the Valencian Community for the year 2012. Furthermore, the CO
2 emissions for each construction unit were obtained from Molina-Moreno et al. [
42]. The data of rolled steel and shear-connector steel were taken to the BEDEC ITEC database of the Institute of Construction Technology of Catalonia [
40].
Table 1 contains all the data on costs and CO
2 emissions considered in this work.
2.1. Design Variables
The structural solution was defined by the parameters and variables, the fixed and variable data, respectively. In this work, the objective was to obtain an optimum steel-concrete composite pedestrian bridge with a box-girder cross section of 38 m of span length, modeled like a beam on two supports. The parameters are defined in
Table 2. These values were considered fixed for the optimization. The construction was carried out on the ground and then large tonnage cranes lifted the structure. This constructive process made it possible to leverage the materials, because the steel and concrete deflection beginnings were the same when the structure was put into service.
Figure 1 shows the deck cross section geometrical variables and the reinforcement.
Table 3 shows the limits defined for all the variables considered in this problem. The section is formed by two main elements, one the one hand, the steel beam conformed to steel sheets, welded and bolstered with longitudinal and transversal stiffeners. On the other hand, a reinforced concrete slab placed in the top of the steel beam and connected to this element by steel shear-connectors. Optimization variables were discrete, to bring the problem into line with reality. It was noted that some dimensions used may not have been practical, but allowed the algorithm to visit feasible intermediate solutions to find better optimal solutions. The total dimension of the problem was 1.67 × 10
27 possible solutions, because of this, the complete evaluation of the problem was unapproachable. The problem optimization was carried out by heuristic techniques.
2.2. Structural Analysis and Constraints
The structure was analyzed like a linear element. The model of the structure considered the shear deformation and the effective flange width [
6]. To obtain the stresses of the structure to check regulations and recommendations constraints, a Fortran language program was implemented. This program calculated the stresses in two sections: mid span and supports. In this structure, the highest stresses occurred in these areas. Prior to the verifying limit states, the program needed to calculate stress envelopes due to the loads. This program evaluated the stress envelopes due to a uniform load of 5 kN/m
2 and the deck self-weight, including the bridge railing and asphalt (see
Table 2). Note that the thermal gradient [
5] and the differential settling in each support were also taken into account. The model implemented obtained the beam stresses and the transversal section tensions to assess the structural design validity.
Once the stresses were obtained, a structural integrity analysis was performed. The ultimate limit states (ULS) assessed the capacity of the structure against the flexure, shear, torsion, and the combination of the stresses. It further considered the minimum reinforcements to resist the stresses and the examination of the geometrical conditions. To evaluate the structural capacity, the regulations employed to obtain the equations that allow the verification of the pedestrian bridge have been the Spanish code on structural concrete [
4], the Spanish recommendations for composite road bridge project [
6], and the code on the actions for the design of road bridges [
3]. The serviceability limit states (SLS) assessed the capacity of the structure to continue its service. The ULS considered in this study were: bending, shear, torsion, shear–torsion interaction, and the stiffeners verification. It must be taken into account that once the variables that define a frame solution have been chosen, then geometry, the materials, and the passive reinforcement are defined. It should be noted that no attempt has been made to calculate the reinforcement in such a way as to comply with common design rules. Such common design procedures follow a conventional order for obtaining reinforcement bars from flexural ULS, and then checking the SLS and redefining if required. While this order is effective, it ignores other possibilities that heuristic search algorithms do not oversee. The seismic verifications are not necessary due to the small value of the calculus acceleration for the location of the constructions. On the other side, the SLS assessed were: deflections, vibrations, cracking, and web deformation. The vibration limit state was verified in accordance with the restrictions for footbridges [
4]. The SLS of cracking included compliance with limitations of the crack width for existing durability conditions. With respect to deflection, the instantaneous and time-dependent deflection was limited to 1/500th of the main span length for the characteristic combination [
4], and the frequent value for the live loads was limited to 1/1200th of the main span length [
5]. Concrete and steel fatigue were not considered, as this ultimate limit state is rarely checked in pedestrian bridges. In addition, the recommendations indicated in the specialized bibliography [
43,
44,
45] were considered.
The modulus implemented compared the structure model values with the values obtained from the regulations equations. This modulus verified the demands of the safety, as well as those relating to the aptitude for service requirement. Therefore, the limit states and the geometrical and constructability requirements must be guaranteed. The ULS checked that the ultimate load effects were lower than the resistance of the structure, as seen in Equation (3):
where
Ru is the ultimate response of the structure and
Su the ultimate load effects. For instance, the ULS of the shear and torsion interaction reduced the shear resistance due to the effect of the torsion. The SLS covers the requirements of functionality, comfort, and aspect (Equation (4)):
where
Cs is the permitted value of the serviceability limit and
Es is the value obtained from the model produced by the SLS actions.

 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}