Detecting Grounding Grid Orientation: Transient Electromagnetic Approach


Abstract
:1. Introduction
2. Related Work
3. Transient Electromagnetic Method
4. Performance Evaluation and Results’ Analysis
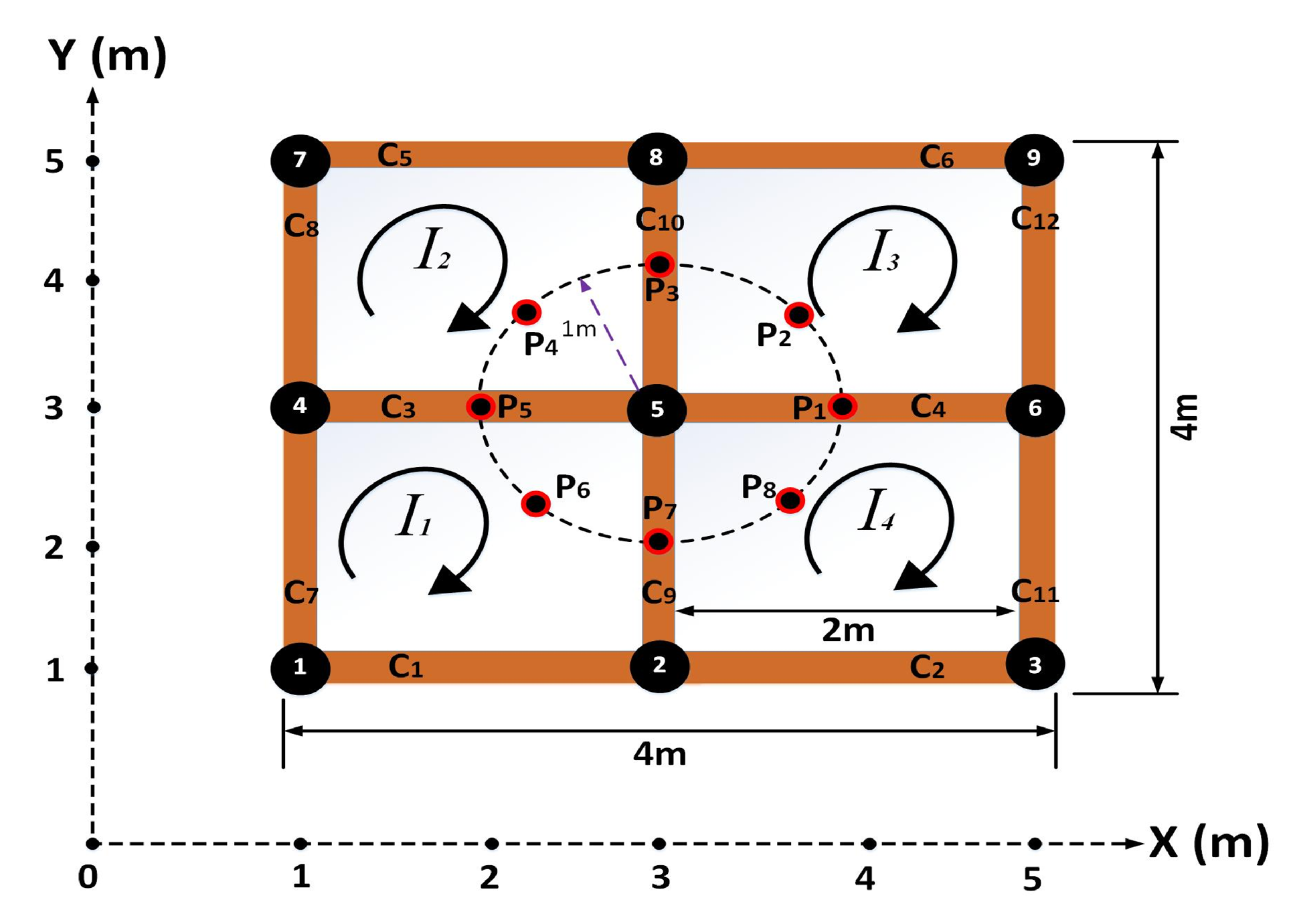
4.1. Simulation Model
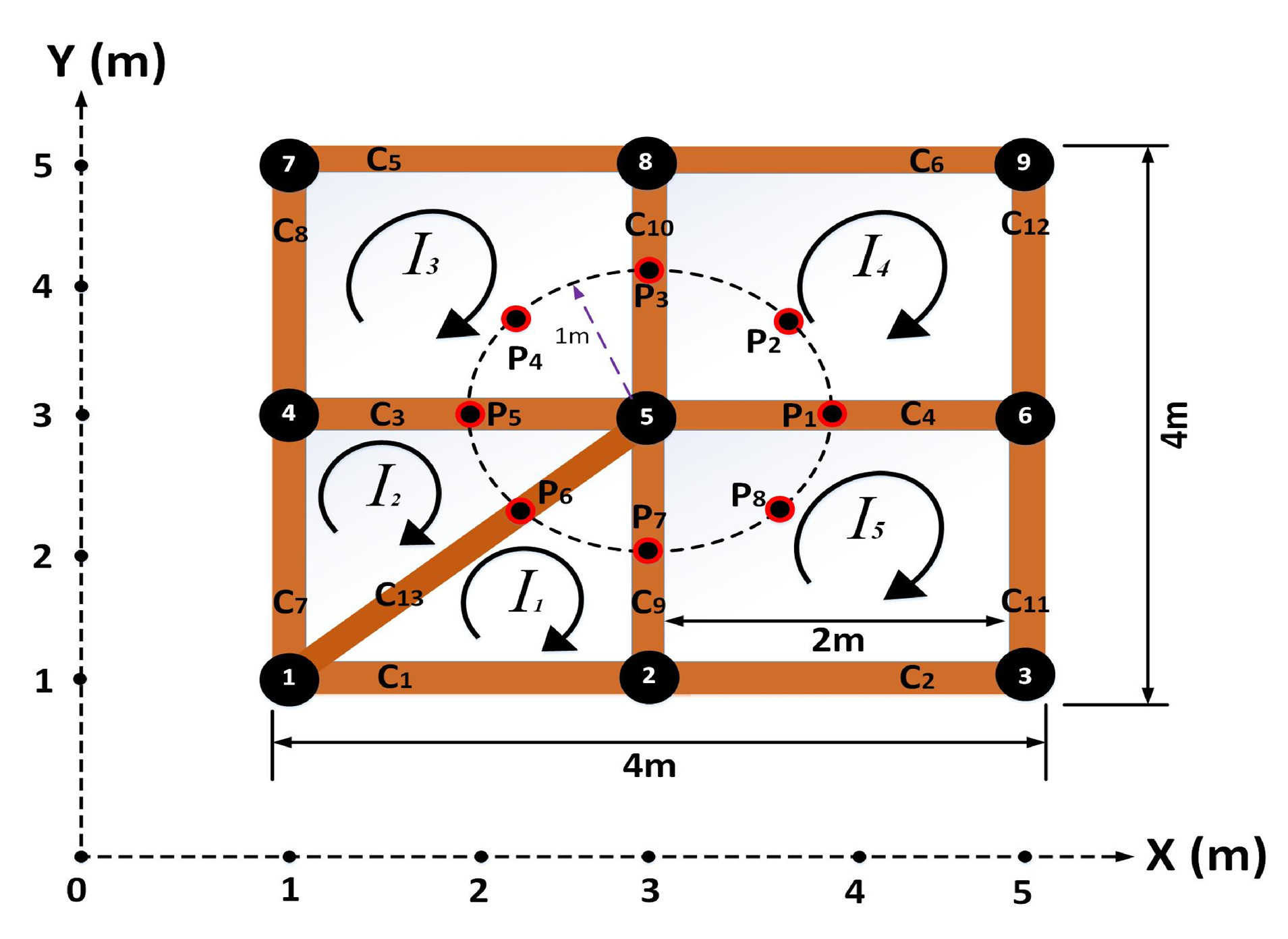
4.2. Grounding Grid with a Diagonal Branch
4.3. Grounding Grid with Unequal Mesh Spacing
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Aamir, Q.; Wilayat, K.; Syed, R.N.; Farooq, A.O. Non-destructive depth detection approach for substation grounding grids based on magnetostatics. IET Electron. Lett. 2019, 55, 1121–1123. [Google Scholar] [CrossRef]
- Gouda, O.E.; Dessouky, S.S.; Kalas, A.E.; Hamdy, M.A. Current distribution in grounding grid conductors with and without vertical rods buried in two-layer soil model. IEEJ Trans. Electr. Electron. Eng. 2018, 13, 1276–1284. [Google Scholar] [CrossRef]
- Bo, Z.; Wu, J.; He, J.; Zeng, R. Analysis of transient performance of grounding system considering soil ionization by time domain method. IEEE Trans. Magn. 2013, 49, 1837–1840. [Google Scholar] [CrossRef]
- Hideki, M. Electromagnetic transient response of buried bare wire and ground grid. IEEE Trans. Power Deliv. 2007, 22, 1673–1679. [Google Scholar] [CrossRef]
- IEEE Std 80-2013 (Revision of IEEE Std 80-2000/Incorporates IEEE Std 80-2013/Cor 1-2015). IEEE Guide for Safety in AC Substation Grounding; IEEE: Piscataway, NJ, USA, 2015.
- El-Refaie El-Sayed, M.; Elmasry, S.E.; Elrahman MKAbd Abdo, M.H. Achievement of the best design for unequally spaced grounding grids. Ain Shams Eng. J. 2018, 6, 171–179. [Google Scholar] [CrossRef] [Green Version]
- Ferrante, N. A new evolutionary method for designing grounding grids by touch voltage control. In Proceedings of the IEEE International Symposium on Industrial Electronics, Ajaccio, France, 4–7 May 2004; Volume 2, pp. 1501–1505. [Google Scholar] [CrossRef]
- Farkoush, S.G.; Wadood, A.; Khurshaid, T.; Kim, C.-H.; Irfan, M.; Rhee, S.-B. Reducing the Effect of Lightning on Step and Touch Voltages in a Grounding Grid Using a Nature-Inspired Genetic Algorithm With ATP-EMTP. IEEE Access 2019, 7, 81903–81910. [Google Scholar] [CrossRef]
- Farkoush, S.G.; Khurshaid, T.; Wadood, A.; Kim, C.-H.; Kharal, K.H.; Kim, K.-H.; Cho, N.; Rhee, S.-B. Investigation and optimization of grounding grid based on lightning response by using ATP-EMTP and genetic algorithm. Complexity 2018, 2018, 8261413. [Google Scholar] [CrossRef]
- Aamir, Q.; Muhammad, U.; Fan, Y.; Muhammad, U.; Zeeshan, K. Derivative Method Based Orientation Detection of Substation Grounding Grid. Energies 2018, 11, 1873. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Yang, F.; Ming, J.; Jadoon, A.; Han, S. Imaging the Corrosion in Grounding Grid Branch with Inner-Source Electrical Impedance Tomography. Energies 2018, 11, 1739. [Google Scholar] [CrossRef] [Green Version]
- Yuan, J.; Yang, H.; Zhang, L.; Cui, X.; Ma, X. Simulation of substation grounding grids with unequal-potential. IEEE Trans. Magn. 2000, 36, 1468–1471. [Google Scholar] [CrossRef]
- Yang, F.; Wang, Y.; Dong, M.; Kou, X.; Yao, D.; Li, X.; Gao, B.; Ullah, I. A Cycle Voltage Measurement Method and Application in Grounding Grids Fault Location. Energies 2017, 10, 1929. [Google Scholar] [CrossRef] [Green Version]
- Liu, K.; Yang, F.; Wang, X.; Gao, B.; Kou, X.; Dong, M.; Ammad, J. A novel resistance network node potential measurement method and application in grounding grids corrosion diagnosis. Prog. Electromagn. Res. M 2016, 52, 9–20. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Cui, X.; Zhao, Z. A magnetic detecting and evaluation method of substations grounding grids with break and corrosion. Front. Electr. Electron. Eng. China 2010, 5, 501–504. [Google Scholar] [CrossRef]
- Yu, C.; Fu, Z.; Wang, Q.; Tai, H.M.; Qin, S. A novel method for fault diagnosis of grounding grids. IEEE Trans. Ind. Appl. 2015, 51, 5182–5188. [Google Scholar] [CrossRef]
- Aamir, Q.; Nadir, S.; Zeeshan, K.; Zahoor, U.; Farooq, A.O. Breakpoint Diagnosis of Substation Grounding Grid Using Derivative Method. Prog. Electromagn. Res. M 2017, 57, 73–80. [Google Scholar] [CrossRef] [Green Version]
- Dawalibi, F. Electromagnetic fields generated by overhead and buried short conductors, Part 2—Ground networks. IEEE Trans. Power Deliv. 1986, 1, 112–119. [Google Scholar] [CrossRef]
- Zhang, X.-L.; Zhao, X.-H.; Wang, Y.-G.; Mo, N. Development of an electrochemical in situ detection sensor for grounding grid corrosion. Corrosion 2010, 66, 076001. [Google Scholar] [CrossRef]
- Yu, C.; Fu, Z.; Hou, X.; Tai, H.M.; Su, X. Break-point diagnosis of grounding grids using transient electromagnetic apparent resistivity imaging. IEEE Trans. Power Deliv. 2015, 30, 2485–2491. [Google Scholar] [CrossRef]
- Li, C.; He, W.; Yao, D.; Yang, F.; Kou, X.; Wang, X. Topological measurement and characterization of substation grounding grids based on derivative method. Int. J. Electr. Power Energy Syst. 2014, 63, 158–164. [Google Scholar] [CrossRef]
- Aamir, Q.; Fan, Y.; Wei, H.; Ammad, J.; Muhammad, Z.K.; Xu, N. Topology measurement of substation’s grounding grid by using electromagnetic and derivative method. Prog. Electromagn. Res. B 2016, 67, 71–90. [Google Scholar] [CrossRef] [Green Version]
- Yu, C.; Fu, Z.; Wu, G.; Zhou, L.; Zhu, X.; Bao, M. Configuration detection of substation grounding grid using transient electromagnetic method. IEEE Trans. Ind. Electron. 2017, 64, 6475–6483. [Google Scholar] [CrossRef]
- Fu, Z.; Song, S.; Wang, X.; Li, J.; Tai, H.M. Imaging the topology of grounding grids based on wavelet edge detection. IEEE Trans. Magn. 2018, 54, 1–8. [Google Scholar] [CrossRef]
- Liu, K.; Yang, F.; Zhang, S.; Zhu, L.; Hu, J.; Wang, X.; Irfan, U. Research on Grounding Grids Imaging Reconstruction Based on Magnetic Detection Electrical Impedance Tomography. IEEE Trans. Magn. 2018, 54, 1–4. [Google Scholar] [CrossRef]
- Qamar, A.; Yang, F.; Xu, N.; Syed, A.S. Solution to the inverse problem regarding the location of substations grounding grid by using the derivative method. Int. J. Appl. Electromagn. Mech. 2018, 56, 549–558. [Google Scholar] [CrossRef]
- Mohamed, M.; Gad, E.-Q.; Usama, M.; Abeer, E.-K.; Jun, M.; Naseer, A.-A. Integrated geoelectrical survey for groundwater and shallow subsurface evaluation: Case study at siliyin spring, el-fayoum, egypt. Int. J. Earth Sci. 2010, 99, 1427–1436. [Google Scholar]
- Xue, G.; Yan, Y.; Li, X.; Di, Q. Transient electromagnetic s-inversion in tunnel prediction. Geophys. Res. Lett. 2007, 34. [Google Scholar] [CrossRef]
- Adel, K.M.; Maxwell, A.M.; Sergio, L.F. Deep structure of the northeastern margin of the parnaiba basin, brazil, from magnetotelluric imaging. Geophys. Prospect. 2008, 50, 589–602. [Google Scholar] [CrossRef]
- Yu, C.; Fu, Z.; Zhang, H.; Tai, H.M.; Zhu, X. Transient process and optimal design of receiver coil for small-loop transient electromagnetics. Geophys. Prospect. 2014, 62, 377–384. [Google Scholar] [CrossRef]
- Misac, N.N. Quasi-static transient response of a conducting half-spacean approximate representation. Geophysics 1979, 44, 1700–1705. [Google Scholar] [CrossRef]
- Stanley, H.W.; Gerald, W.H.; Misac, N. Electromagnetic theory for geophysical applications. Electromagn. Methods Appl. Geophys. 1988, 1, 131–311. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measuring Point | Average Magnetic Field Intensity (A/m) | ||
|---|---|---|---|
| Equal Mesh Spacing | Equal Mesh Spacing and Diagonal Branch | Unequal Mesh Spacing | |
| 147.0995 | 264.8785 | 274.8785 | |
| 313.9748 | 340.748 | 330.748 | |
| 114.8244 | 280.854 | 114.8244 | |
| 343.3893 | 313.9748 | 90.345 | |
| 114.8244 | 313.9748 | 276.74 | |
| 343.3893 | 200.051 | 75.632 | |
| 114.2897 | 313.9748 | 114.8244 | |
| 313.9748 | 313.9748 | 330.748 | |
| Measuring Point | Average Equivalent Resistivity (m) | ||
|---|---|---|---|
| Equal Mesh spacing | Equal Mesh Spacing and Diagonal Branch | Unequal Mesh Spacing | |
| 0.2889 | 0.2976 | 0.2916 | |
| 0.2752 | 0.2736 | 0.2758 | |
| 0.2889 | 0.2911 | 0.2889 | |
| 0.2752 | 0.2752 | 0.2933 | |
| 0.2944 | 0.2752 | 0.2900 | |
| 0.2752 | 0.2982 | 0.2944 | |
| 0.2889 | 0.2752 | 0.2889 | |
| 0.2752 | 0.2752 | 0.2758 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qamar, A.; Ul Haq, I.; Alhaisoni, M.; Qadri, N.N. Detecting Grounding Grid Orientation: Transient Electromagnetic Approach. Appl. Sci. 2019, 9, 5270. https://doi.org/10.3390/app9245270
Qamar A, Ul Haq I, Alhaisoni M, Qadri NN. Detecting Grounding Grid Orientation: Transient Electromagnetic Approach. Applied Sciences. 2019; 9(24):5270. https://doi.org/10.3390/app9245270
Chicago/Turabian StyleQamar, Aamir, Inzamam Ul Haq, Majed Alhaisoni, and Nadia Nawaz Qadri. 2019. "Detecting Grounding Grid Orientation: Transient Electromagnetic Approach" Applied Sciences 9, no. 24: 5270. https://doi.org/10.3390/app9245270
APA StyleQamar, A., Ul Haq, I., Alhaisoni, M., & Qadri, N. N. (2019). Detecting Grounding Grid Orientation: Transient Electromagnetic Approach. Applied Sciences, 9(24), 5270. https://doi.org/10.3390/app9245270