1. Introduction
A stand-alone DC microgrid is an independent, controllable, small-scale electrical system in the presence of Distributed Generators (DGs), controllable and non-controllable loads, power electronic components, and protective devices [
1]. With the rapid development and integration of renewable energy resources, a novel alternative is required to ensure stable operation under different operation conditions. Based on the literatures, high- and low-voltage DC systems are recognized as an efficient method for power transmission and distribution. Since Edison’s time, the DC system has been implemented for energy supply purposes, but due to the lack of standards and technologies, AC system have been leading the DC network. Whereas the emerging of new power electronics and distributed energy resource technologies have made it easier to interconnect power components and build a multi-terminal DC system. However, DC short-circuit protection is still considered to be one of the major challenges for DC network applications in terms of small- and large-scale power transmission and distribution [
2].
A large and growing body of literature has relied on low-voltage DC breakers in terms of a DC network or microgrid protection. More recently, in [
3], a protection scheme for the hybrid AC/DC low-voltage distribution system based on transient stability analysis, backed by radial distribution system simulation and verification, has been proposed.
In [
4], a mechanical DC breaker for real-time application is discussed. This study aims to propose a simulation mechanism for a DC breaker mechanical design at the simulation phase. This study formulates the components of a DC breaker (such as a high-speed vacuum interrupter, injection circuit, surge arrester, and residual switch) to evaluate the interruption of the DC fault in real-time.
In [
5], an optimized method was hired to calibrate the DC circuit breaker with the help of an active injection circuit. This study took an optimized approach to enhance the DC circuit breaker’s performance according to its local fault current in a critical situation. The PSCAD
® platform was used to evaluate the effectiveness of the proposed algorithm which could guarantee that the di/dt was within a safe limit during an interruption.
In [
6], a framework was exposed based on a mathematical morphology approach to detect and protect a DC distribution network. This study characterized fault at a low-voltage distribution network, which focused on the DC short-circuit fault with low impedance, and a high impedance fault with arc concepts. The proposed filter-based approach is known as a cost-effective solution, in which there is no need for a communication link between relays or between a relay and its components.
In [
7], a protection and control scheme for DC multi-microgrid configuration was proposed. This study tried to come up with an integrated solution in terms of simultaneous protection and control. The effectiveness of the study was evaluated through an experimental microcontroller circuit.
In a small-scale DC system, the distributed renewable generators, storage system, and loads can interface with the common bus through DC-converters, and prevent multiple energy conversion steps to deliver the most efficient and sustainable energy supply for power demands. Compared to AC, the DC power system does not have synchronization, reactive power, harmonics, skin effect, high heat-loss, and low-efficiency problems [
8,
9]. Also, there is no need for inverters to integrate DC power generators, storage devices, and DC loads with the direct current system. They can be integrated by highly efficient DC–DC converters to prevent large amounts of energy loss and system complexity. In addition, in any small-scale isolated microgrid, the total power generation capacity should be more than the maximum existing load to completely supply the load in any condition. Conversely, the output of renewable resources, especially the fluctuation of PV generators and wind turbines, depend on environmental conditions that result in power-supply instability. Thus, providing stable power by renewable generators is the main challenge when producing consistent electrical networks. Consequently, renewable generators need to be combined with energy storage systems to solve instability problems. Additionally, PV modules and the related power electronic converters as a small-scale DC system impact on the system’s operation in any short-circuit situation [
10]. Also, converters can lose their controllability to retain the bus voltage within acceptable values. Due to the low DC impedance and rapid increase of the fault current, the DC network needs a high-speed protection system, which has significantly different requirements compared to an AC fault protection system. Fault area isolation from the rest of a DC grid would provide safety for the operation of non-faulted areas [
11,
12]. Furthermore, the application of traditional low-voltage (LV) AC protection solutions for a DC microgrid has the drawback of slow operation, resulting in the requirement for electrical components with a higher capacity (which cause a high initial cost and take up more space) [
13]. Besides, battery banks or capacitors would feed the short-circuit current, resulting in a lot of thermal and mechanical stress on the system’s components [
14]. To overcome this challenge in direct current systems, a high-speed protection system with an appropriate circuit breaker (CB) is a known exigence [
15]. Due to the absence of mechanical components, contact erosion, having a long lifetime and high-speed operation (tens of microseconds (
s)), the semiconductor breakers are considered as a potential solution to overcome these barriers in a DC system [
16,
17].
In this study, we analyse a short-circuit protection scheme based on semiconductor technologies. For the protection of the entire network, an ideal two-way semiconductor Solid State Circuit Breaker(SSCB), based on IGBT and a control system are used to detect the fault current, and we isolated it in any part of the system within a short time. The rest of the paper is organized as follows:
Section 2 deals with the structure of the proposed DC microgrid schemes and components design. The DC fault characteristics and effects are explained in
Section 3. In
Section 4 and
Section 5, different fault-detection methods and the proposed methodology are introduced. The results and discussion are presented in
Section 6 and
Section 7. Finally, the study is concluded with the main findings and contributions in
Section 8.
2. Simplified DC Microgrid Description and System Parameters
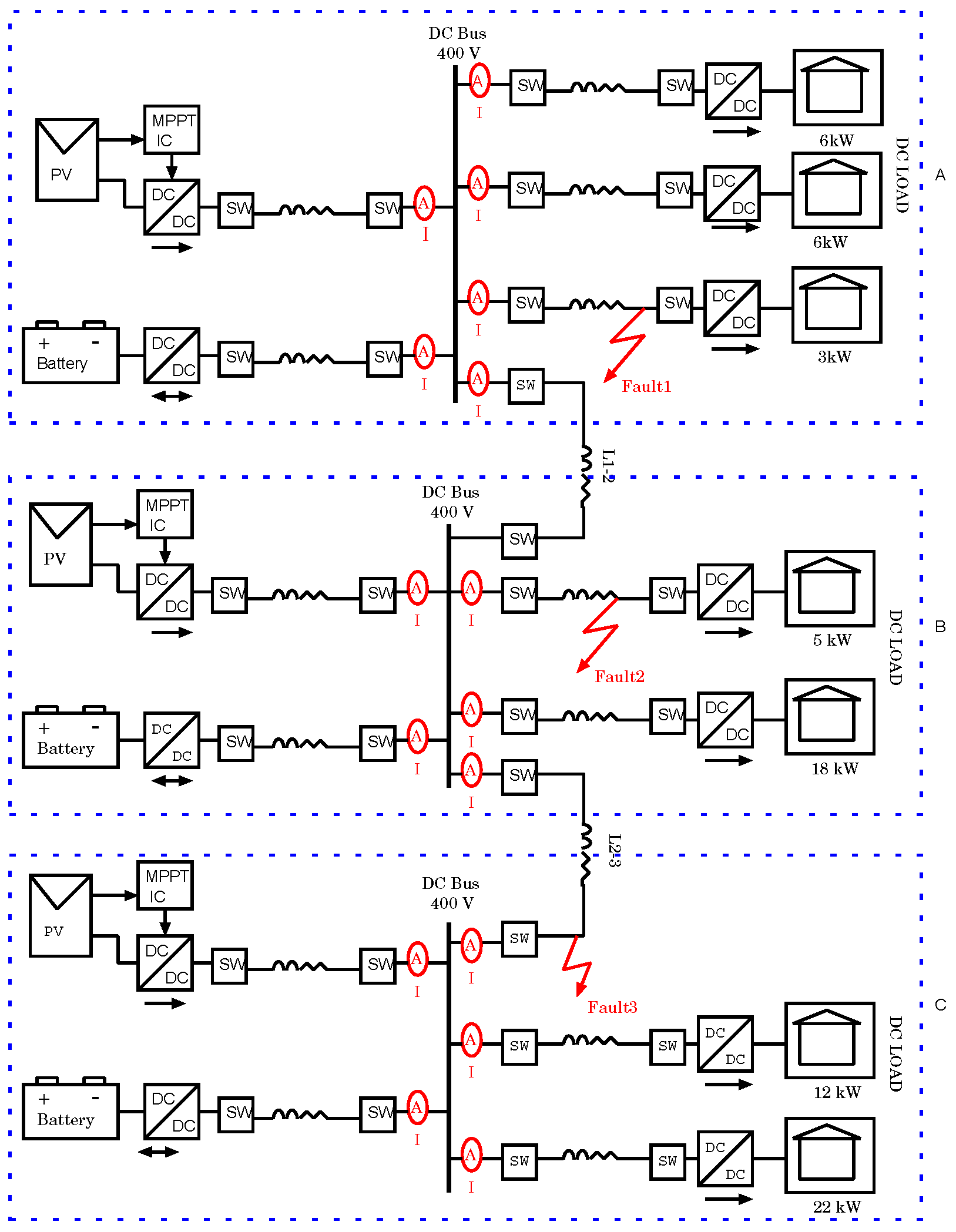
The configuration of the proposed small-scale multi-terminal low-voltage DC system with three small interconnected areas is shown in
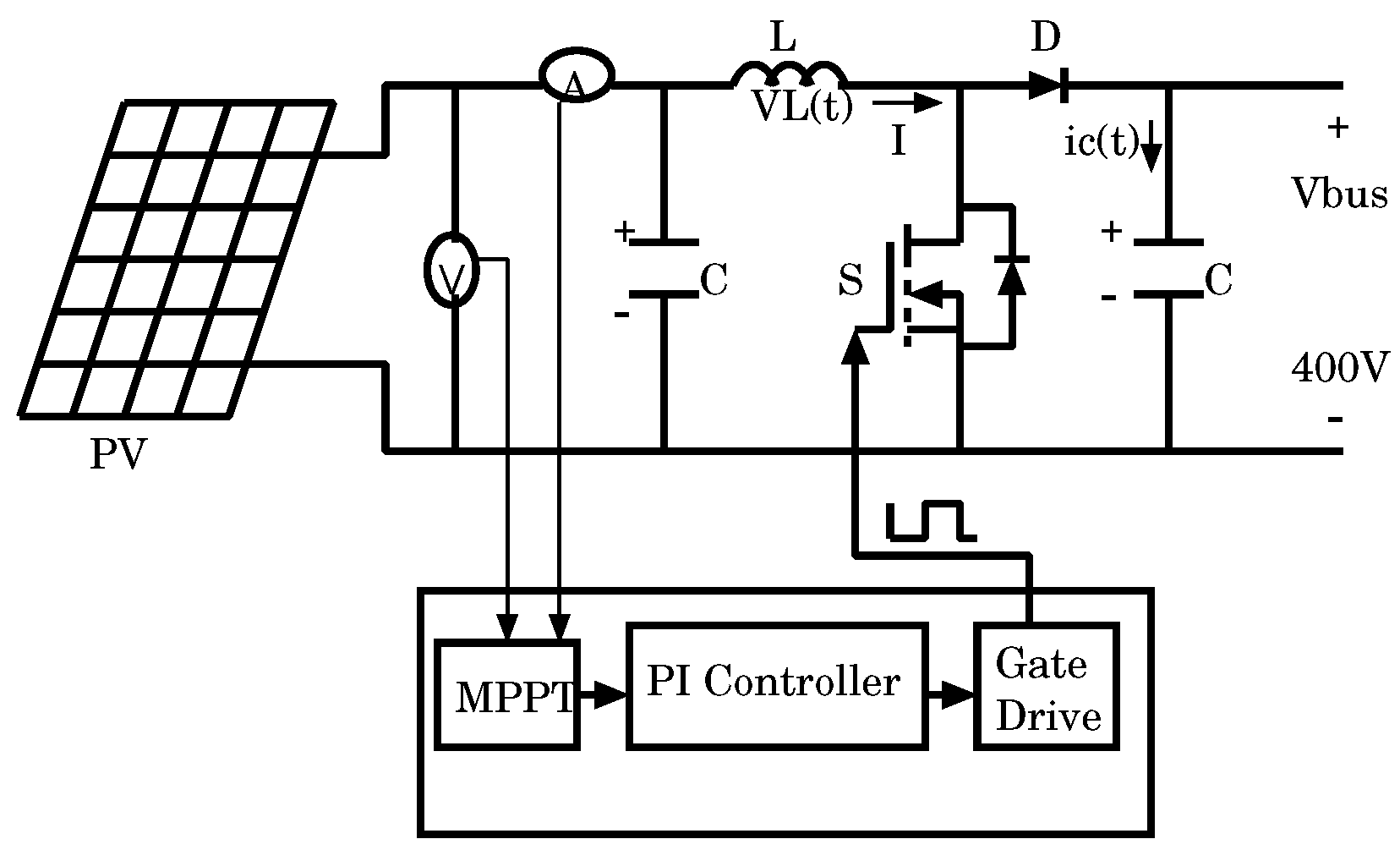
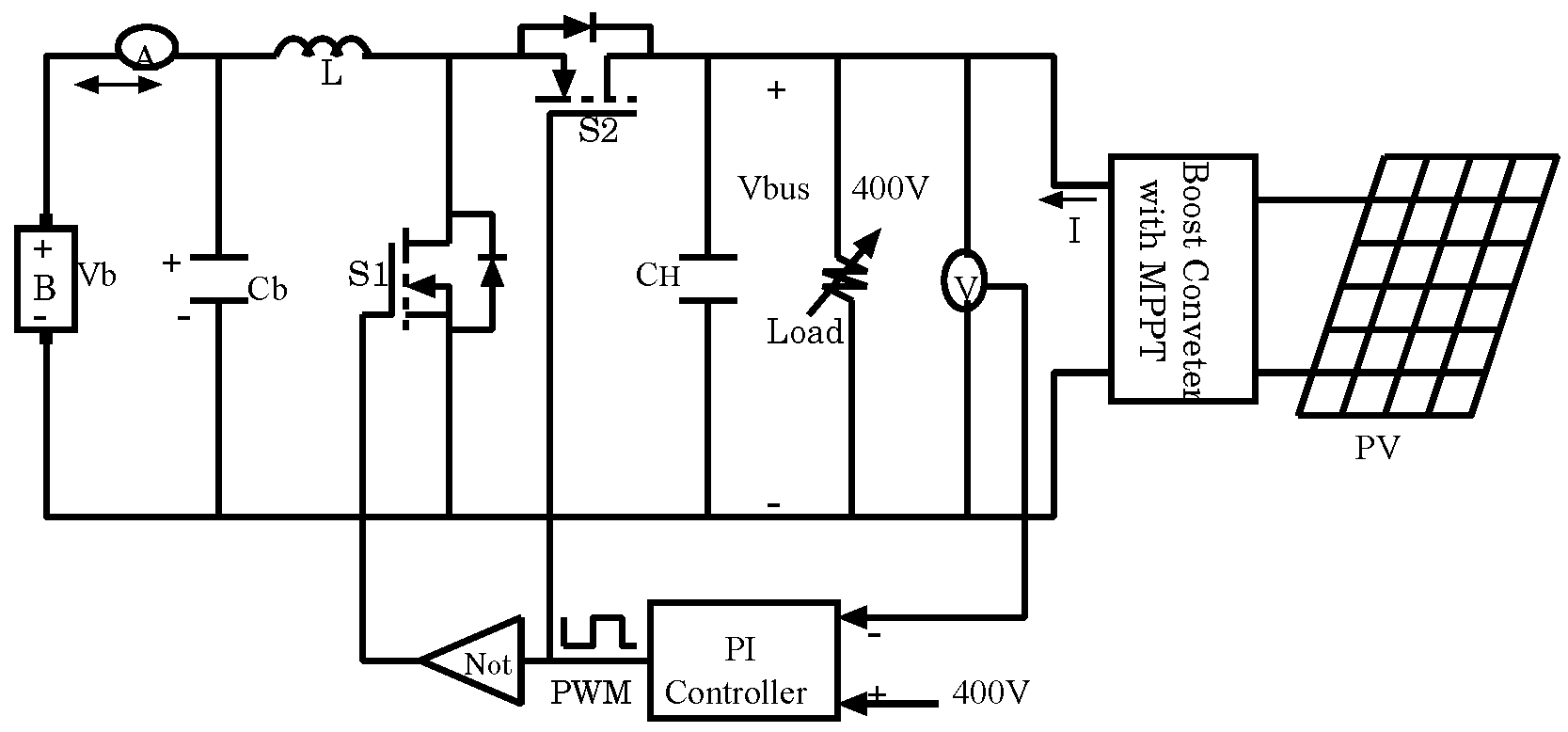
Figure 1. The breakers which connect the buses must open during the fault condition in any part of the interconnected lines. In each area, PV panels, loads, and the storage system, as the main components, were connected through the converters and breakers. the PV boost converter used a Maximum Power Point-Tracking-Incremental Conductance (MPPT-IC) Algorithm to track the maximum power point and deliver the maximum available power of the PV [
18,
19]. The feedback PI controller was used to regulate the output voltage of the boost rectifier. Also, batteries were equipped with a DC–DC bidirectional converter to provide two-way power flow. They charged by using the surplus power generation of PV and discharging over the night and cloudy periods. The main components of the system are listed in
Table 1. In this configuration, power can be shared among the neighboring areas based on the voltage deviation of each local area. We also specified some representative locations where faults (
–
) could occur in the system to evaluate the proposed protection system. Due to the effects of line impedance on the voltage drop, fault current, and fault interruption time, we considered it as a constant value. In a multi-terminal network, a consideration of CB at both ends of the line and interconnected buses are essential to prevent complete blackout by downstream short-circuit faults. Recently, the SSCB has been recognized by a key enabling technology for the DC distribution system and had the ability to interrupt the circuits under a full load within
s. The regional short-circuit interruption can be perfectly obtained by integrating the CB with the related controller throughout the system [
20]. The relevant electrical circuits and controllers of the converters with battery and solar panels are depicted in
Figure 2,
Figure 3 and
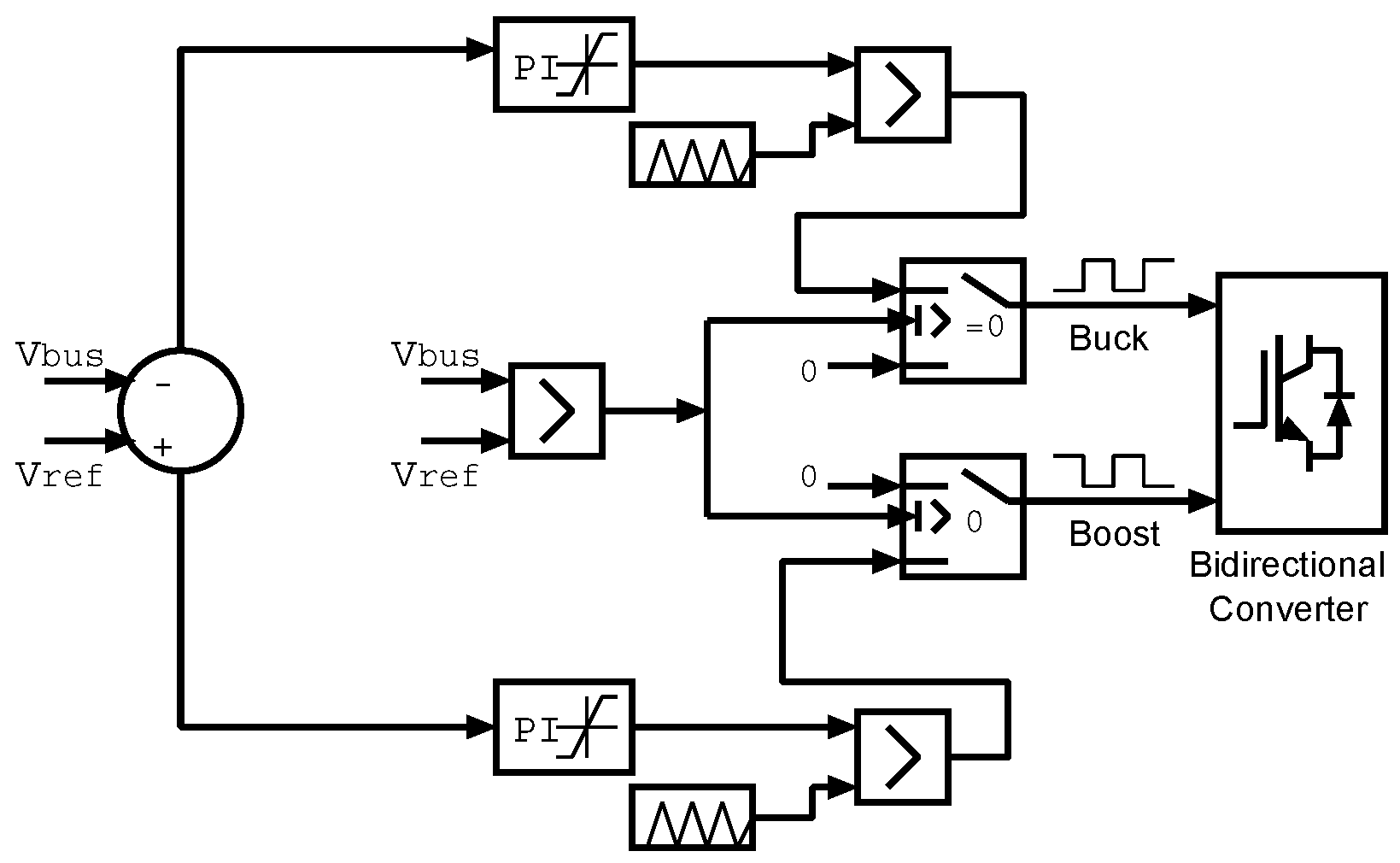
Figure 4. In
Figure 4, the difference of the bus voltage (
) and the reference value (desired bus voltage) was computed by the synchronous measurement of the bus voltage, and the mismatch converged to the desired value through two feedback PI controllers and the proper operation of the bidirectional converter.
3. DC Fault Characteristics and Effects
Generally, two typical electrical faults (line-to-line and line-to-ground) can occur in a DC electrical system. In most cases, a short circuit is happening in the line-to-ground fault because of the easy connection between the line to the ground by any natural event or unintentional action. Comparatively, the line-to-line fault impedance is lower than the line-to-ground short-circuit condition, which causes a huge fault current during line-to-line faults. The impedance of line-to-ground faults can be either as a low or high-impedance depending on the type of the grounding system. Also, the types of grounding, characteristics of the distribution line, and system components have a direct effect on the voltage sag and the value of the fault current [
14]. During any DC short-circuit accident, the resistance of the fault path can converge to its minimum value, and the fault current can increase to a peak value in a short time.
In this study, three typical DC short circuits were applied at three different points, as depicted in
Figure 1. When faults occur, the current which flows through the related branch diverges from the normal value. Usually, five types of protection devices, such as mechanical breakers (Molded-Case Circuit Breakers (MCCB) and Miniature Circuit-Breakers (MCB)), fuses, SSCB, and the hybrid SSCB have been used for DC fault interruptions. However, their operation speed is different, which can range from a few (
s) for SSCB and about tens of milliseconds (ms) for mechanical breakers [
21]. On the other hand, the maximum allowable time for the fault interruption can be decided based on how much the fault can withstand the capability of the system components. Fast short-circuit detection and segregation are necessary for system recovery and the reduction of electrical stresses on converters and the system components. For the proper selection of the protection device, the functionality, operation speed, time coordination, and controllability considerations are essential to deal with fast fault interruption and arc extinguishing. The design of a protection system needs to abide by the following characteristics [
22]:
Operating speed;
Selectivity;
Reliability;
Reactivity;
Strength.
5. Semiconductor Breakers and Operation Principle of the Proposed Method
Different types of Mechanical Circuit Breakers (MCB) and short-circuit termination strategies have been implemented for DC fault-protection purposes. Whereas, due to the rapid increase of DC fault currents and a low operation speed (hundreds of ms) of MCBs, it requires distribution line and associated power electronics devices with higher capacity and size to sustain such a high current. Comparatively, SSCB-based protection methods can provide high-speed protection (few
s) schemes to prevent the high initial cost and occupation of large spaces [
29]. The SSCBs are embedded into two useful major categories in protection system devices: (i) semiconductor current limiters, and (ii) semiconductor breakers [
30]. The SSCBs consist of semiconductor switches (IGBT, MOSFET, etc.). Due to the absence of moving mechanical parts, the SSCB has a longer lifespan than MCB [
31]. Among different types of semiconductor switches, the IGBT is a good choice for low-voltage protection purposes because of its operation speed, ruggedness, commercial availability, and low power requirement to run the gate drive. For reliability, the different circuit needs to be combined with SSCB, which are mentioned as follows:
Resistor, Capacitor, and Diode (RCD) Snubber Circuit:
The main components of the RCD circuit are the resistor, capacitor, and diode. The resistor is connected in series to prevent high inrush current while the breaker is connecting, and the shunt capacitor suppresses the voltage jump during the disconnection of SSCB. Additionally, the anti-parallel diode circuit bypasses the high transient current, which generates when the breaker interrupts the circuit;
Metal Oxide Varistor (MOV):
The MOV has the sustainability of frequent huge ripple currents and temporary high energy. Also, because of the variable resistance characteristics of MOV, it is used to protect electrical circuits under a surge voltage situation. The MOV makes a short circuit in high voltage conditions and its resistance is increased when the voltage decreases, meaning that the current-dependent equipment of the system will remain safe from the sudden voltage surge;
Freewheeling Diode:
Normally, the snubber diode is not an overvoltage protective device, but helps to prevent circuit damage by providing an emergency path for high energy of the stray components when an abrupt voltage spike is happening in an electrical circuit by a sudden change of supply current or fault conditions.
Due to the capability of obtaining fast-fault interruption, SSCB can meet protection requirements for the DC-microgrid. A DC system has a unique challenge like DC short-circuit identification, appropriate grounding systems, and current limiting challenges. Due to a divergence in DC short-circuit current values, traditional protection devices will face challenges in reactivity and operating speed. Therefore, developing an appropriate protection strategy is quite important to expand the DC electrical system.
In this study, line-to-ground faults (
,
, and
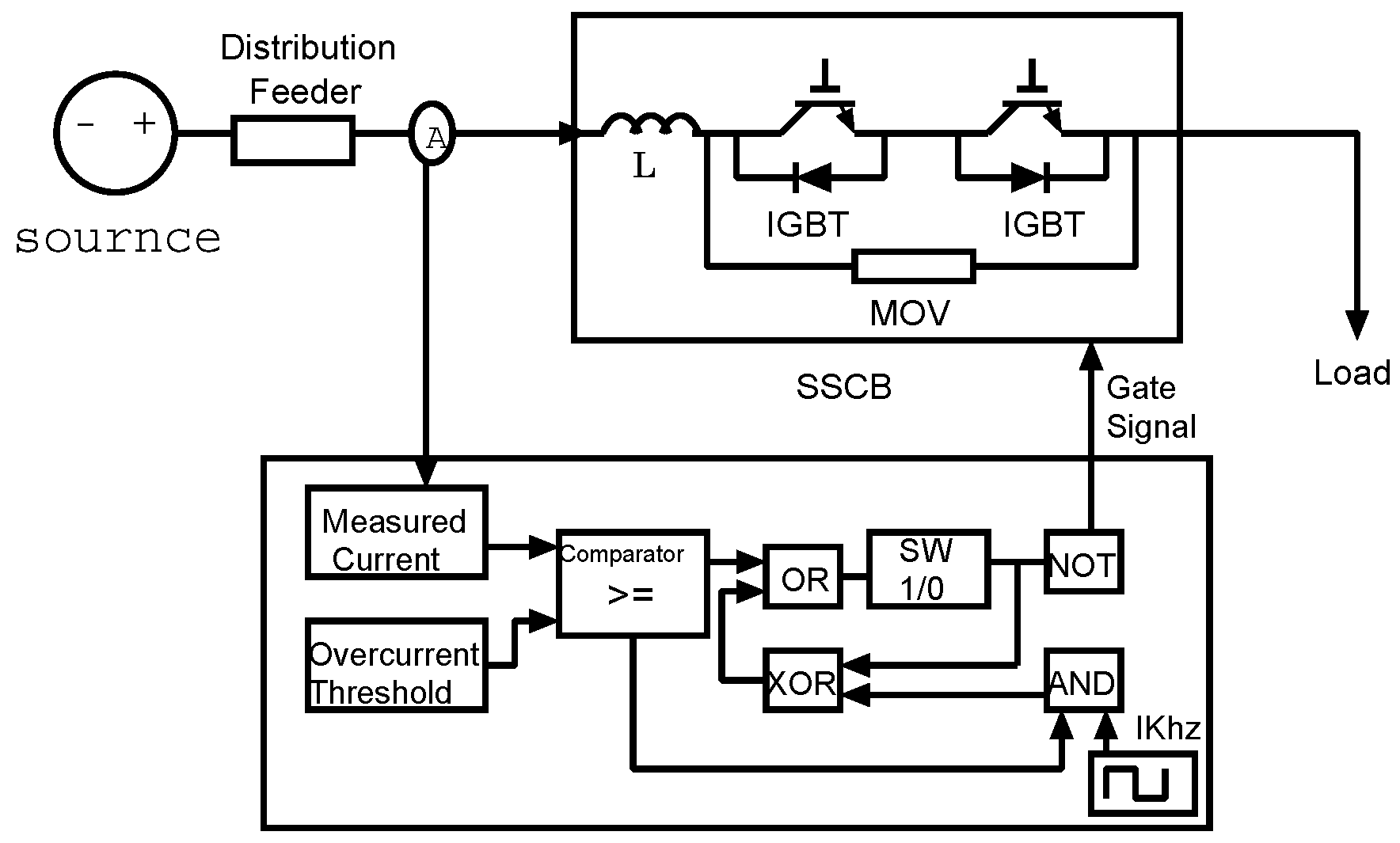
) were applied to evaluate the operation of the proposed protection system. Furthermore, the proposed protection system worked based on the current-rise technique of the fault current. For specification and detection of the fault situations, we defined the a threshold current in this strategy to identify the fault area easily. As shown in
Figure 5, during the normal condition of the DC microgrid, the output of the control system for the circuit breaker was one and the circuit was prolonged to its normal operation. As soon as the control system sensed a divergence in the current of the circuit, the output signal changed to zero and the circuit breaker was disconnected to separate the faulted branch. Additionally, during the operation of SSCB, because of the abrupt interruption of the fault current, a large over-voltage would occur. Consequently, although the voltage rating of the semiconductor devices has recently improved, it still does not have high-voltage blocking capabilities, but will damage the breakers and other components in the system. Thus, multiple semiconductors need to be connected to improve the high-voltage blocking capability of the breaker. It will enlarge the components’ size and initial costs. Therefore, to provide safety for the components and prevent system enlargement, an over-voltage limiting circuit (parallel MOV) was integrated with the breaker to limit the rise in voltage and dissipate the high energy as heat. Also, for reliable operation and long life of the switches, accurate synchronization of gate controls and snubbing of stray energy was required. Therefore,
Figure 5 shows the connection of two IGBT circuit breakers with anti-parallel diodes and its related operational controller. Additionally, when a short circuit is happening in any branch of the typical multi-terminal DC microgrid, a huge current will pass through the snubber diodes circuit, which causes an over-current on the system. Here, in this SSCB, and in a normal situation, the current will flow through the IGBTs, whereas in a short-circuit situation, the SSCB will be interrupted to reduce the current to zero. During the fault conditions, the protection system of the related area should pass the following steps:
Sensing the variation of the common bus voltage and converter current;
Sending an operation command for related protection devices operation;
Blocking the CB and turning off the power unit converters in the fault branch;
Waiting for a few ms after Step 3 to ensure that the current of faulted feeder decays turns to zero;
Opening the related breaker and de-energizing the faulted branch;
Re-energizing the fault branch by closing the CBs and the converter.
The faults in
Figure 1 are considered an ideal line-to-ground short circuit with zero resistance, and the result of the proposed protection strategy is depicted in
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10 and
Figure 11. In each case, when a DC fault occurs, the fault current increases rapidly, whereas the SSCB interrupts it before it reaches the peak value. Still, a high current which passes through the breaker and a large amount of energy will be accumulated in a surge arrestor, which can be calculated by Equations (
1) and (
2) [
32]. Additionally, the surge voltage across the breaker is limited to the clamping voltage of the MOV, and it is assumed
:
The total dissipated energy as heat by the surge arrestor is given by the equation below:
Where in these equations, V is the normal voltage of the system, and
and
represent the amplitude of the fault current and energy absorbed in the surge arrestor, respectively. Commonly, the amount of
is much smaller than
V to suppress the voltage rise across the SSCB. Therefore, the amount of
in MOV is a large quantity. In a freewheeling diode SSCB’s types, the purpose of the diode is to provide a path for large currents and reverse voltage impulses. The amount of energy bypassed by a snubber diode is given by the equation below:
Consequently, as shown in Equations (
2) and (
3), the energy absorbed in the MOV type is more than the energy bypassed by the snubber diode type. Furthermore, in order to decrease the fault current quickly while the breaker is disconnecting, the voltage capacity of the SSCB should be more than
[
33].
6. Simulation Results
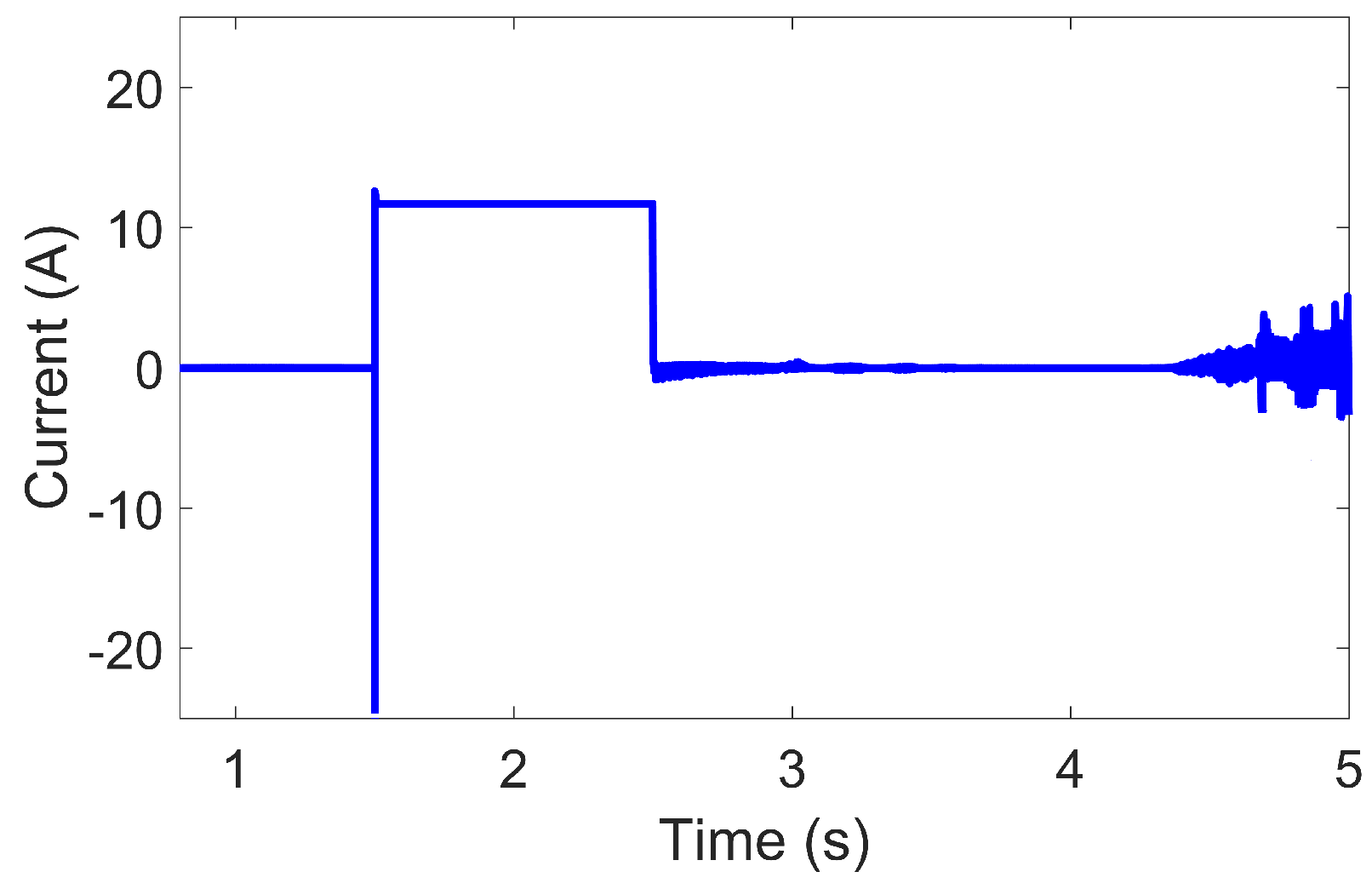
As mentioned in previous sections, during the fault condition, the converter’s current reaches such a high value within a short time to cause the breakage of converters. Therefore, the application of SSCB is necessary to maintain the system’s safety. Different simulation scenarios, such as load side and distribution feeder faults, are carried out to verify the performance of the proposed topology. In the first scenario at
s, a pole-to-ground fault (
) is initiated at the load side in area A. In the second scenario, a pole-to-ground fault is applied in area B at
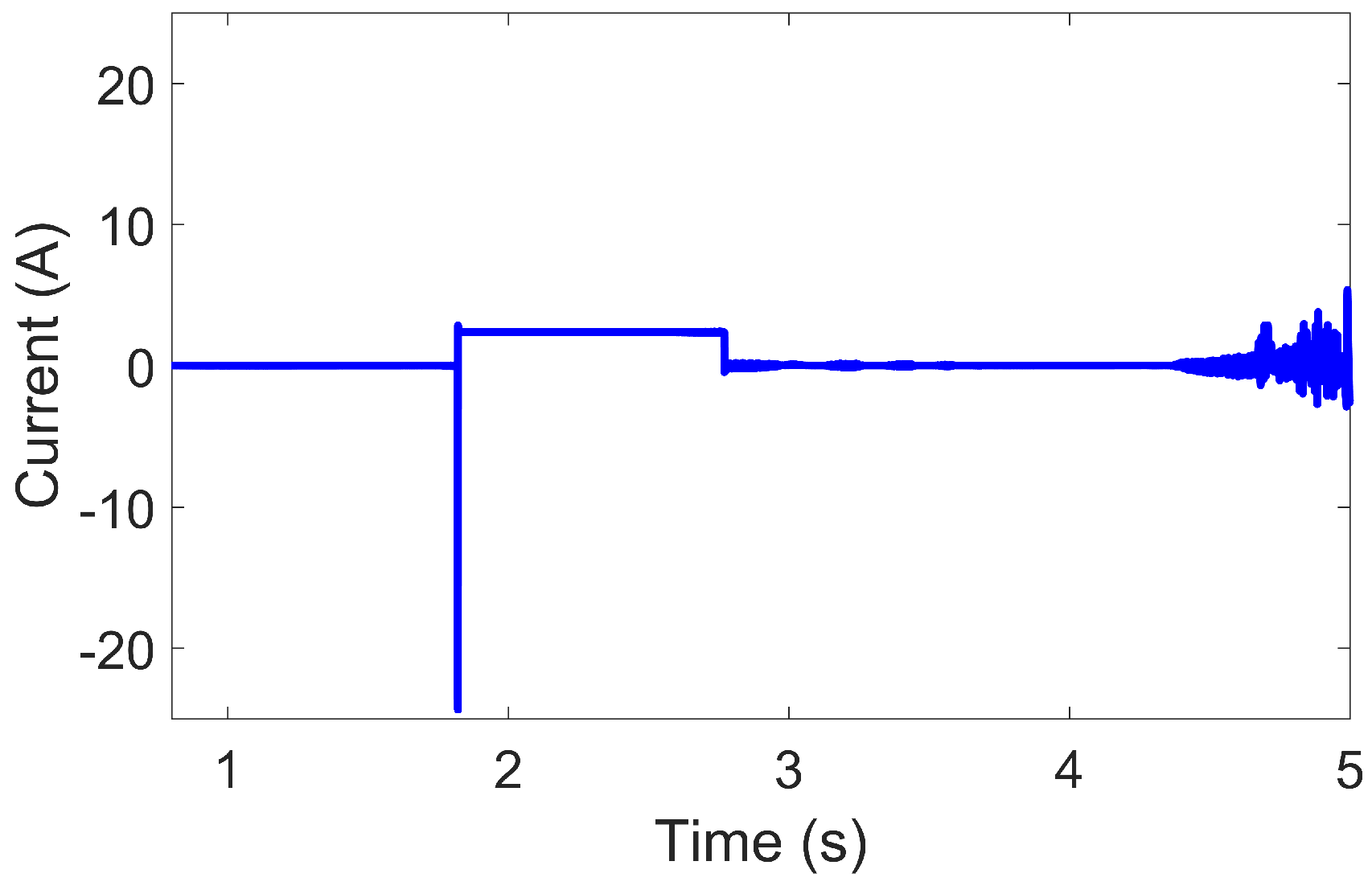
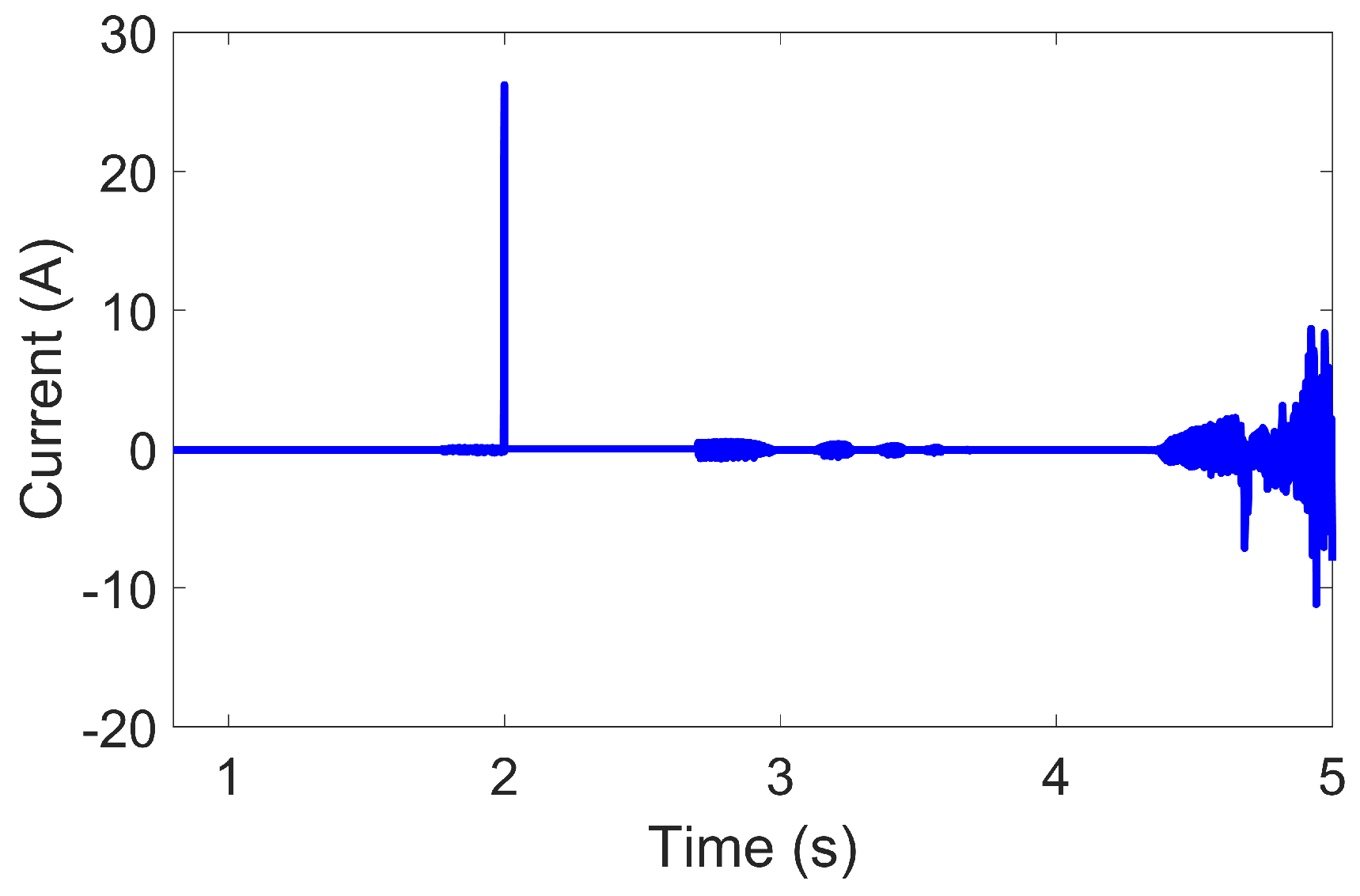
s. The third DC fault is applied on the feeder, which connects area A and B at time 2 s. In regard to the main objective for this study, which is fast fault interruption, the operational safety of the rest of the system is maintained and keeps the system components in an acceptable range. As shown in
Figure 6,
Figure 7,
Figure 8,
Figure 9,
Figure 10 and
Figure 11, during the three fault scenarios, the current in each case starts to increase exponentially, and is only limited by the DC line resistance (
). When the fault current reaches the positive or negative threshold values, the breaker interrupts the fault current within a few
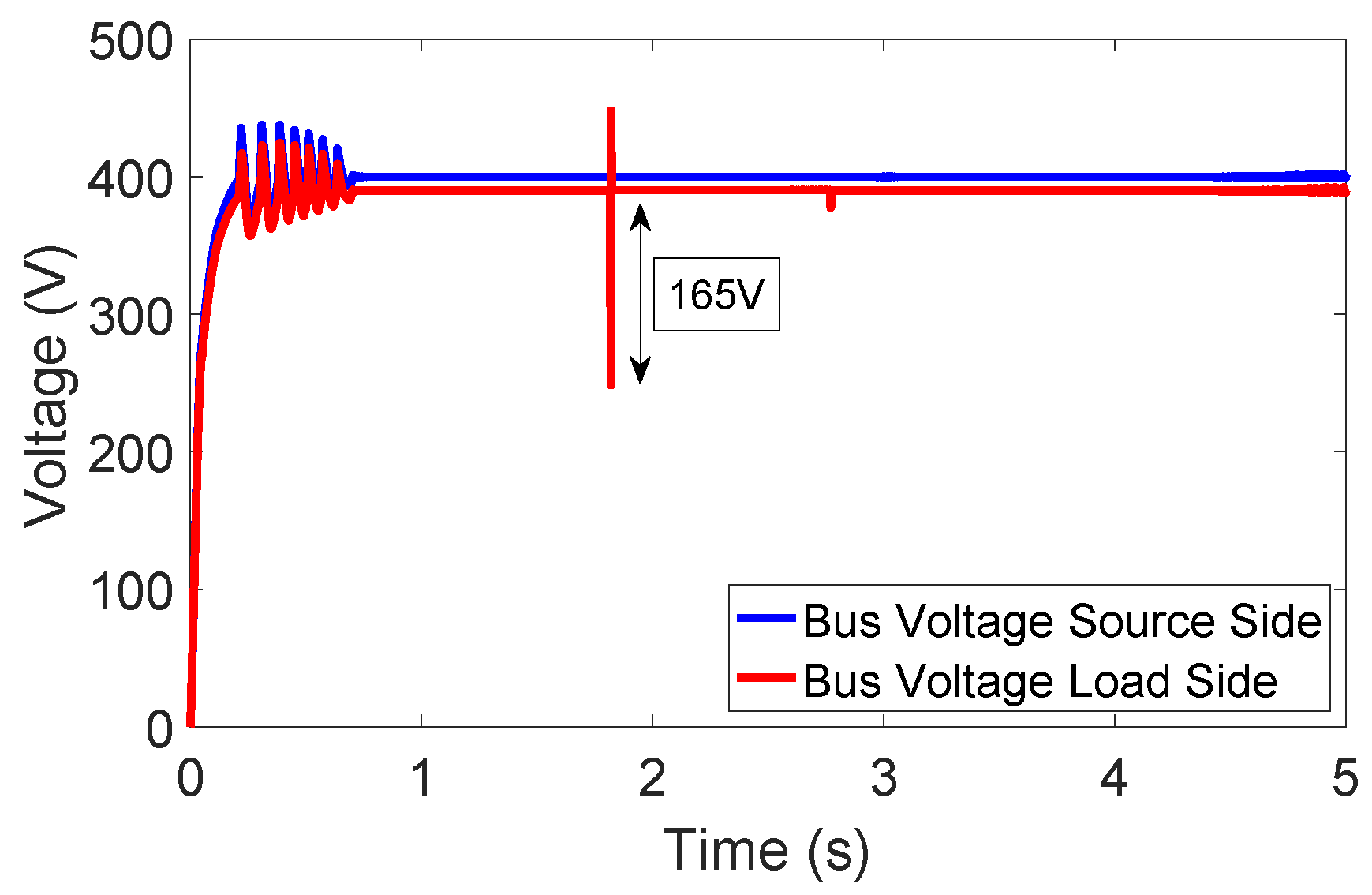
s to prevent system failure and maintain a stable power for the load demands. Additionally,
Figure 10 shows the DC bus voltage during
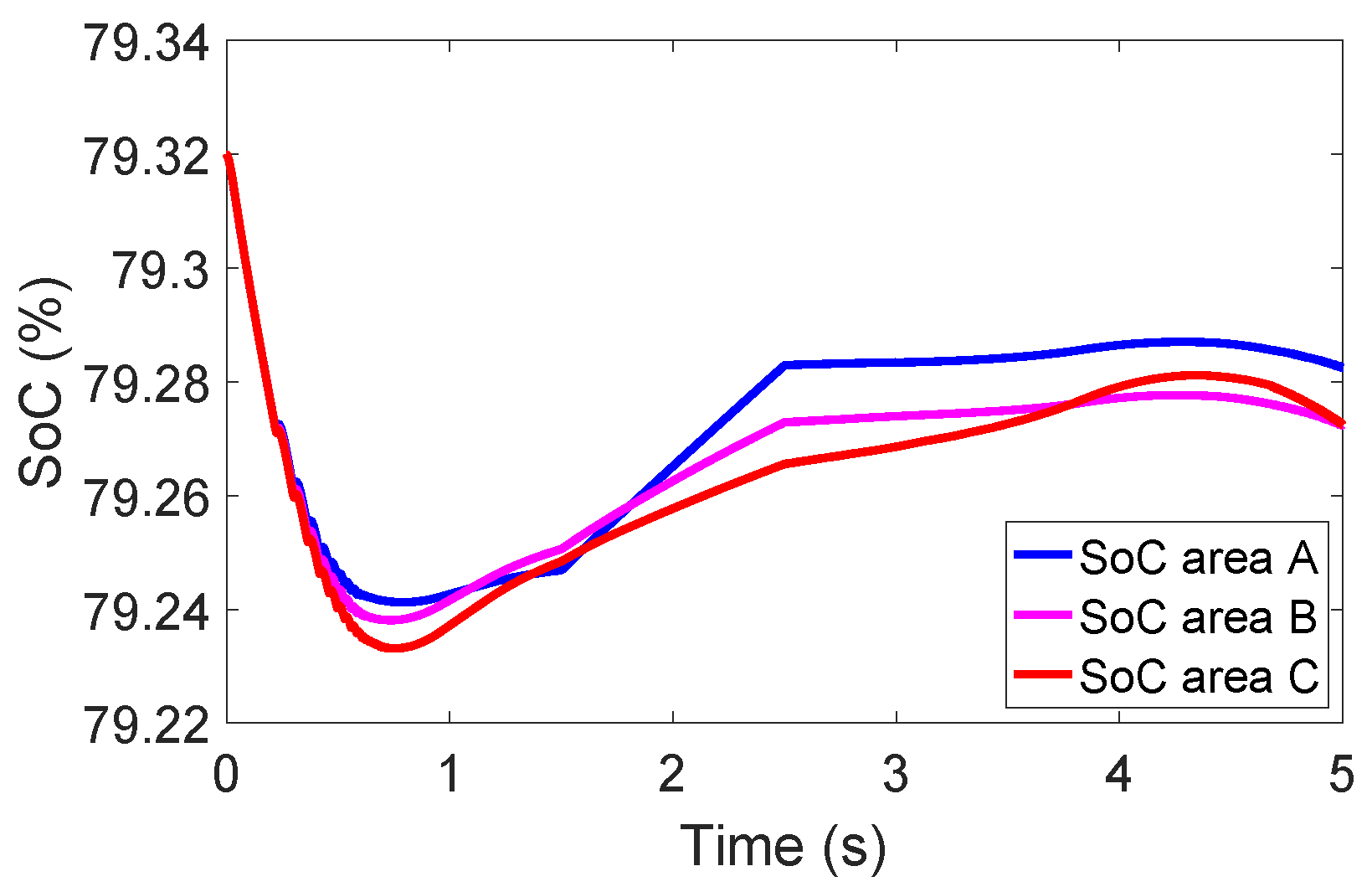
, where as soon as the bus voltage decreases more than the threshold value, the nearest CB to the fault in area B suddenly disconnects the fault branch and the bus voltage returns to its normal value. The simulation results for the current, voltage waveforms, and State of Charge (SoC) of the battery during the fault conditions are depicted in the following figures.
7. Discussion and Analysis
The three-case simulations verification shows the amount of voltage drop along the distributed line, protection, and isolation of the fault branch which occurred in different areas at different times. The normal voltage drop along the feeder is 12 V, which is
of the rated voltage, as depicted in
Figure 10. Also, when
occurs, the DC bus voltage is dropped to 235 V and returns to the normal situation after the fault interruption. In
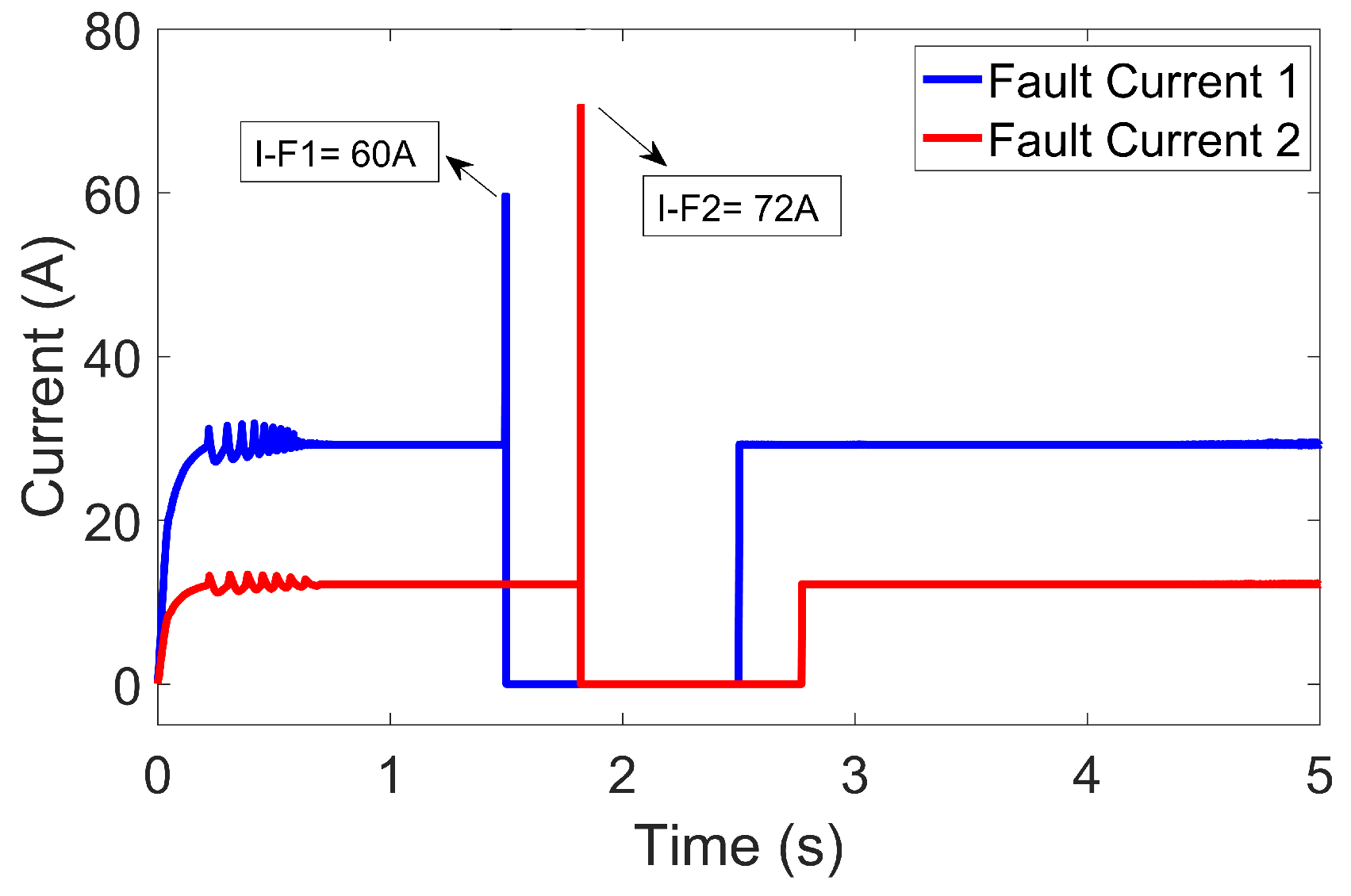
Figure 7, when
is happening in area A, due to the isolation of the load branch, the rate of charge in this area increases more rapidly than the other parts. Meanwhile, the fault currents (
,
) reach its maximum values, 60 A and 72 A, respectively. After the disconnection of short circuits, the accumulated energy is attracted by MOV, and the fault current decays to 0 A within
s until the fault is removed from the system and is reconnected within
s, as shown in
Figure 8 and
Figure 11. During this time, the current rise is limited to a certain value, and after the fault interruption the current flow increases to reach the neighboring areas, as shown in
Figure 6 and
Figure 9. Furthermore, during
at 2 s, the current flow jumped to a high value from B and C to the faulted point, but the breakers which were connecting B and C acted abruptly at both sides and disconnected the fault. However, the high conduction loss and cost of the semiconductor breakers technology was considered as the main obstacle to wide application. However, there is a comparison among the cheap MCB with a low operation speed and fast semiconductor breakers with high conduction losses for protection application. Additionally, there are some current fluctuations at the end of the simulation in
Figure 6,
Figure 9, and
Figure 11. At this time, the solar radiation is decreased rapidly in three areas and the PV outputs are too low to support the load, which causes high current fluctuation among the areas to supply the connected loads and share the power. The simulation results have shown that the SSCB safely turned off, and the rest of the system continued to operate normally. Also, the freewheeling diodes started conducting, while the currents reached values that were not affordable by converters.
8. Conclusions
This paper presented an isolated DC microgrid cluster within an innovative approach of using IGBT-based SSCB protection devices. At the start, the most recent literature and findings in the context of low-voltage solid-state DC beakers were reviewed. Then, existing challenges, along with DC fault behavior analysis with different protection strategies, were systematically investigated. Consequently, a viable, cost-effective solution using IGBT and SSCB compared to the traditional AC fault protection was exposed. The proposed scheme effectiveness was evaluated by applying three short circuits at different time-frames, in which the sensed current and voltage deviation at the voltage terminal of IGBTs and branch currents demonstrated improved behavior. Besides, when the current deviation went beyond the permitted the threshold, the associated SSCB simultaneously took action by receiving an interruption command from the controller. The simulation results show that the proposed short-circuit interruption strategy is fast enough to maintain DC microgrid safety, along with stabilization and operational performance improvement.


 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}