Research on the Structure and Control Strategy of a Novel Power Electronic Transformer for AC/DC Hybrid Distribution Network


Abstract
:1. Introduction
2. System Topology
2.1. Topology of Conventional PET
2.2. Topology of the Proposed Novel PET
3. Control Strategy
3.1. Input Stage Control Strategy
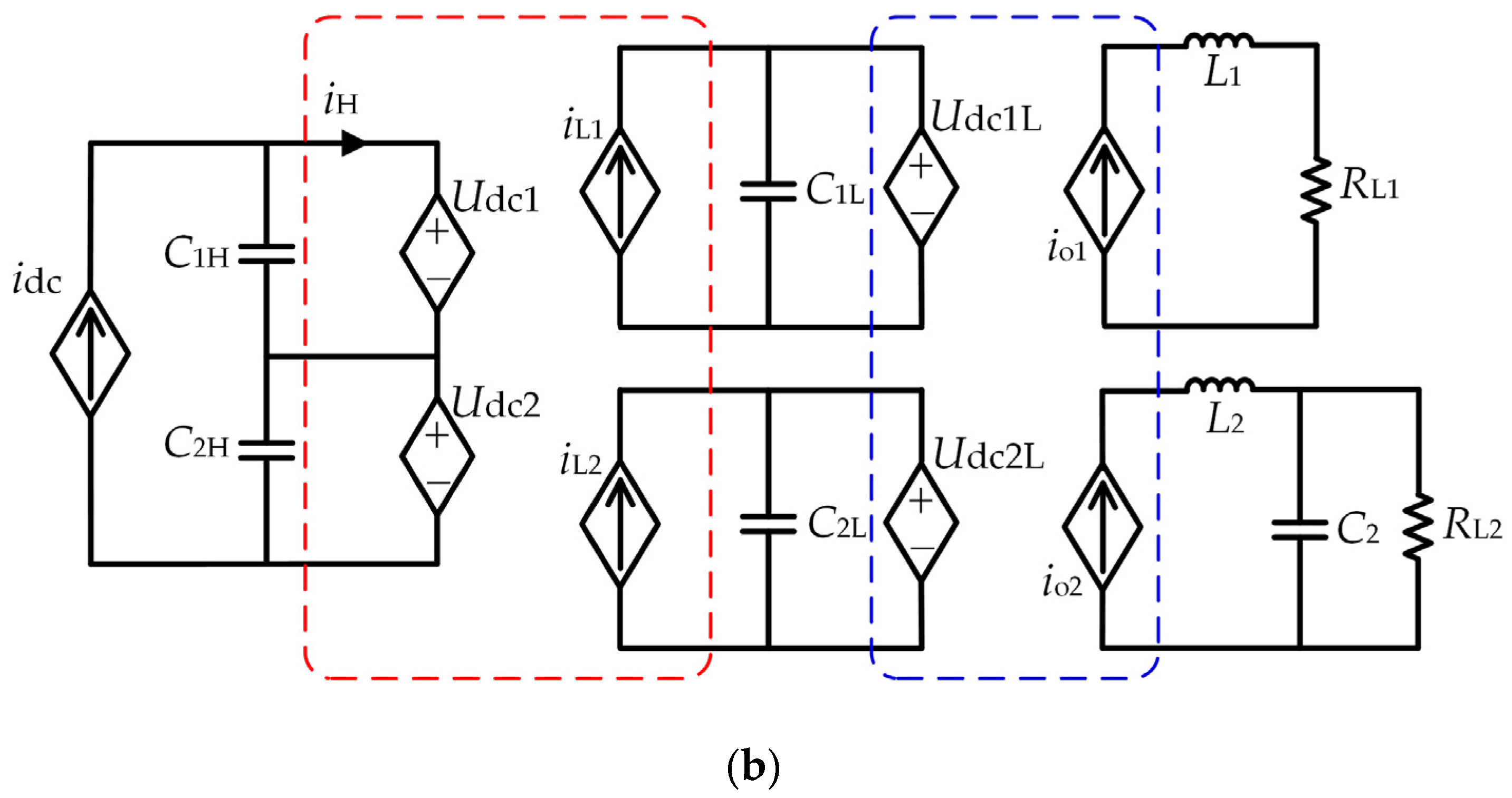
3.1.1. Mathematical Model of MMC
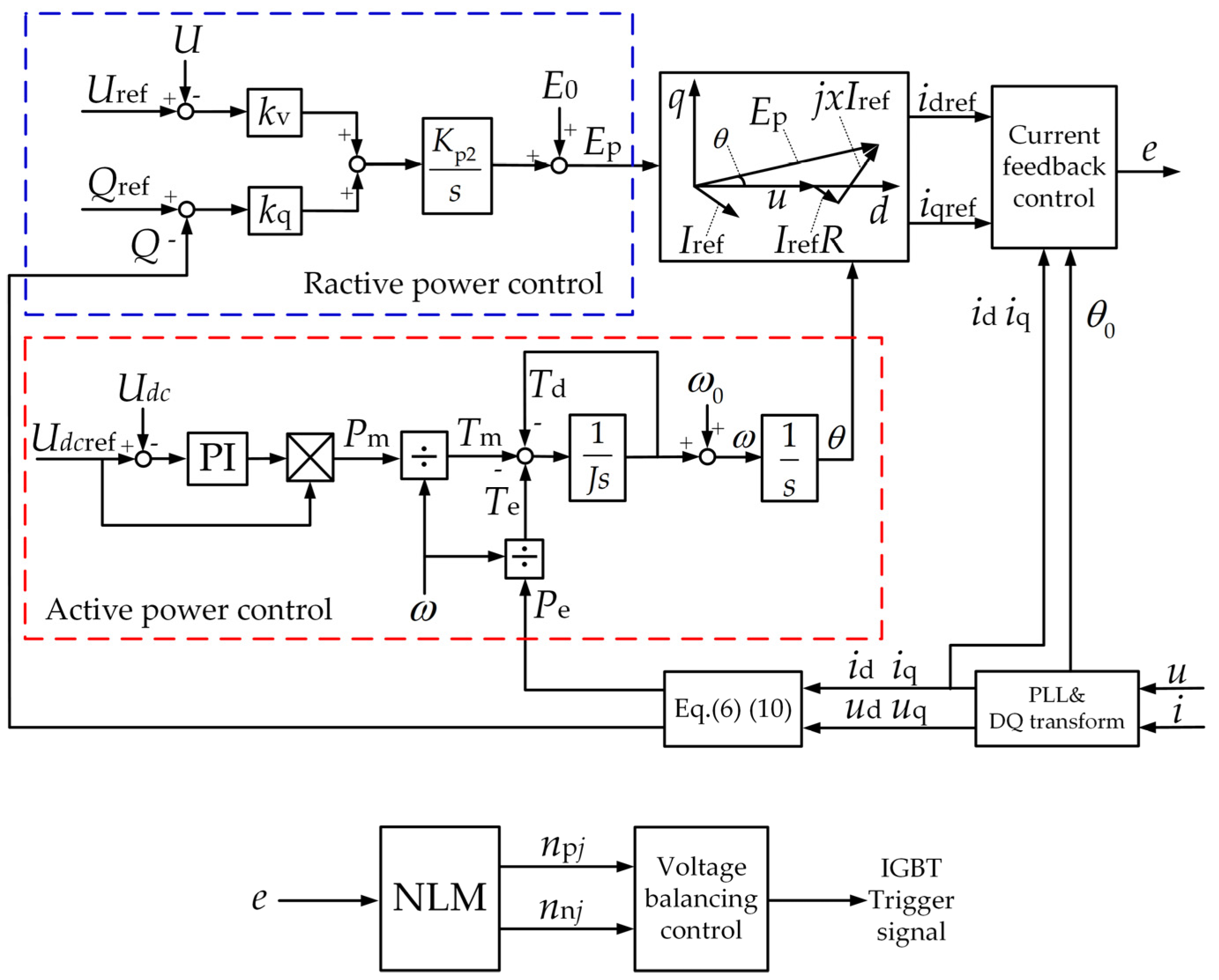
3.1.2. VSM-Based MMC Control Strategy
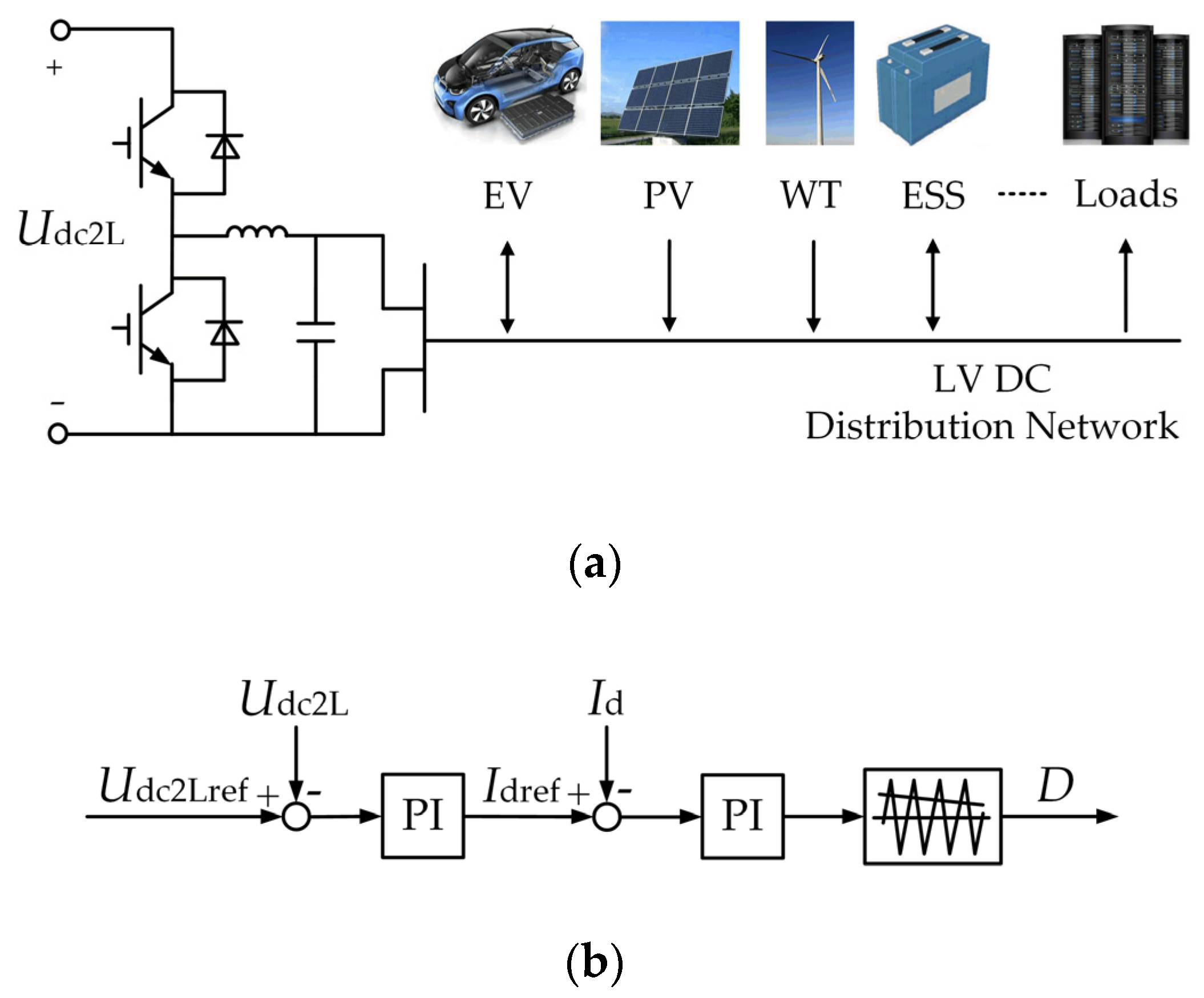
3.2. Output Stage Control
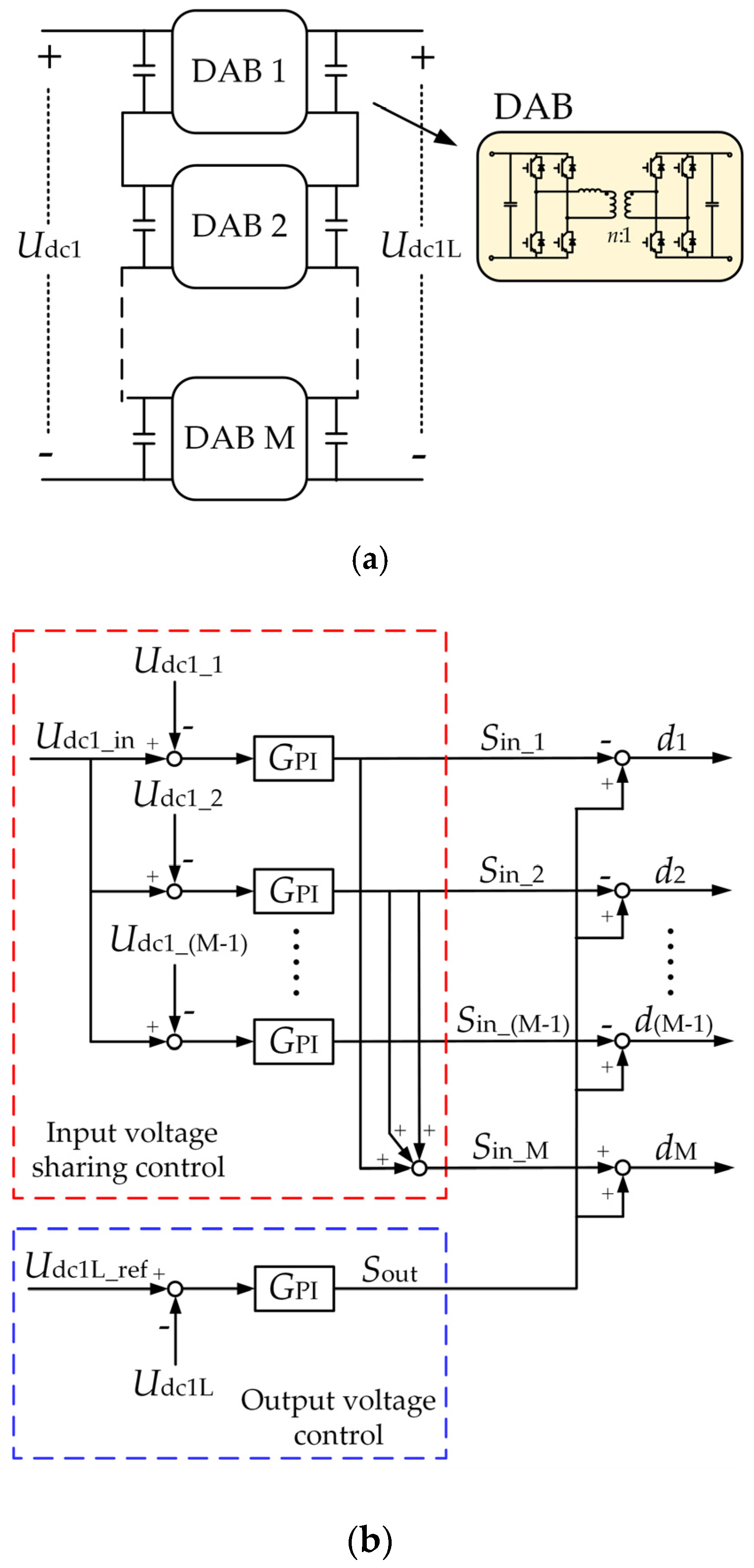
3.3. Isolation Stage Control
3.4. Power Coordinated Control
4. Simulation Verification
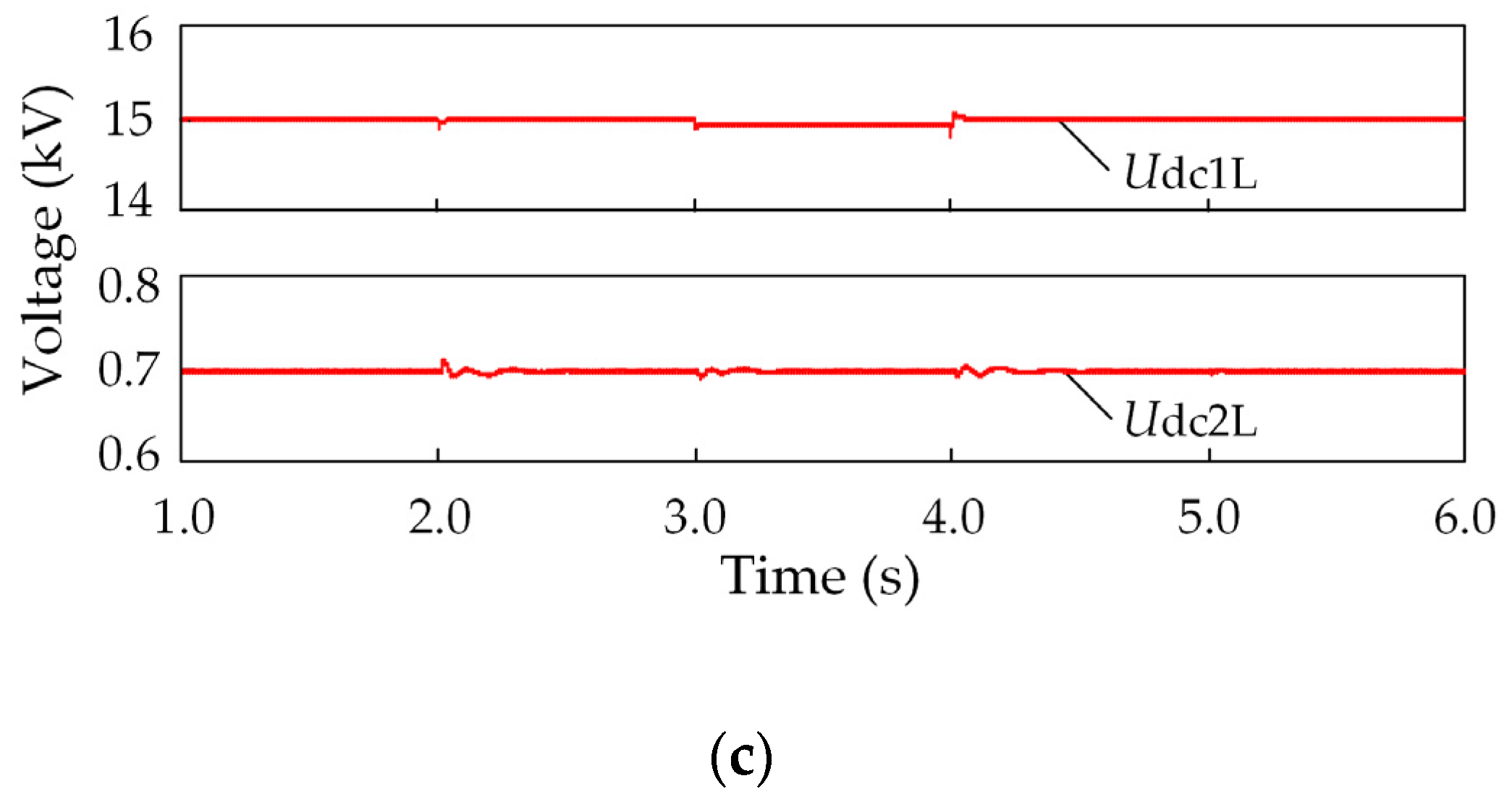
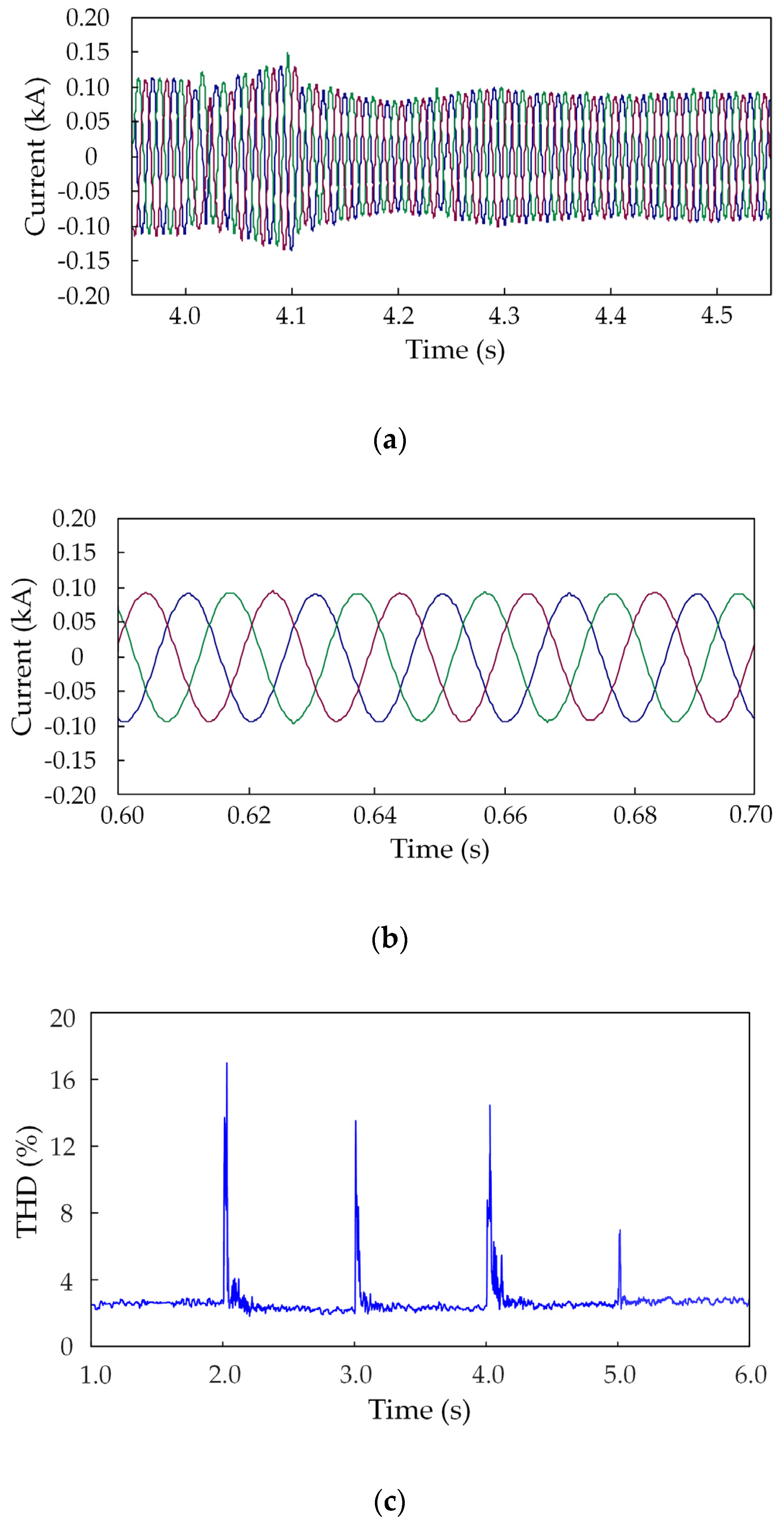
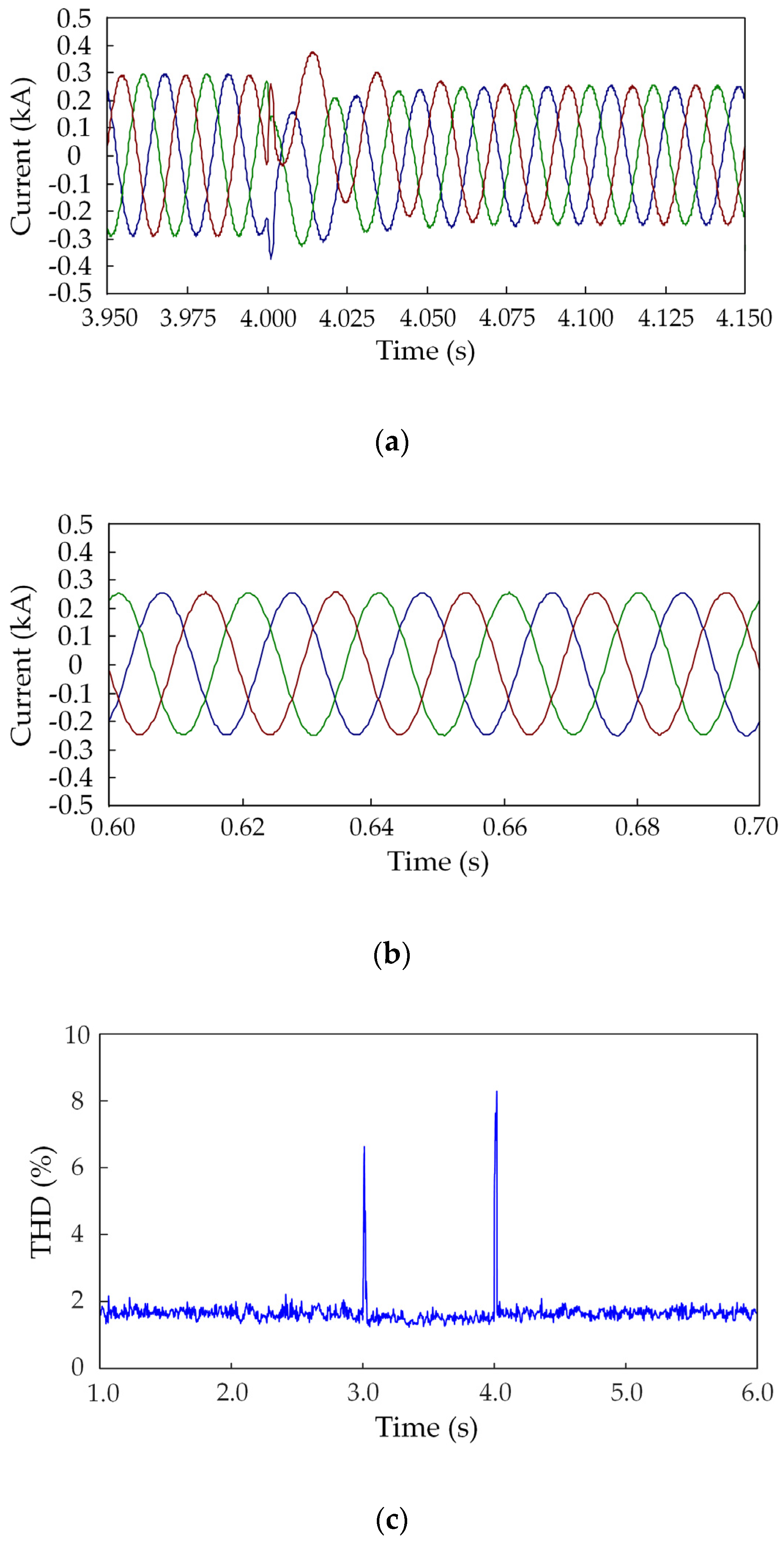
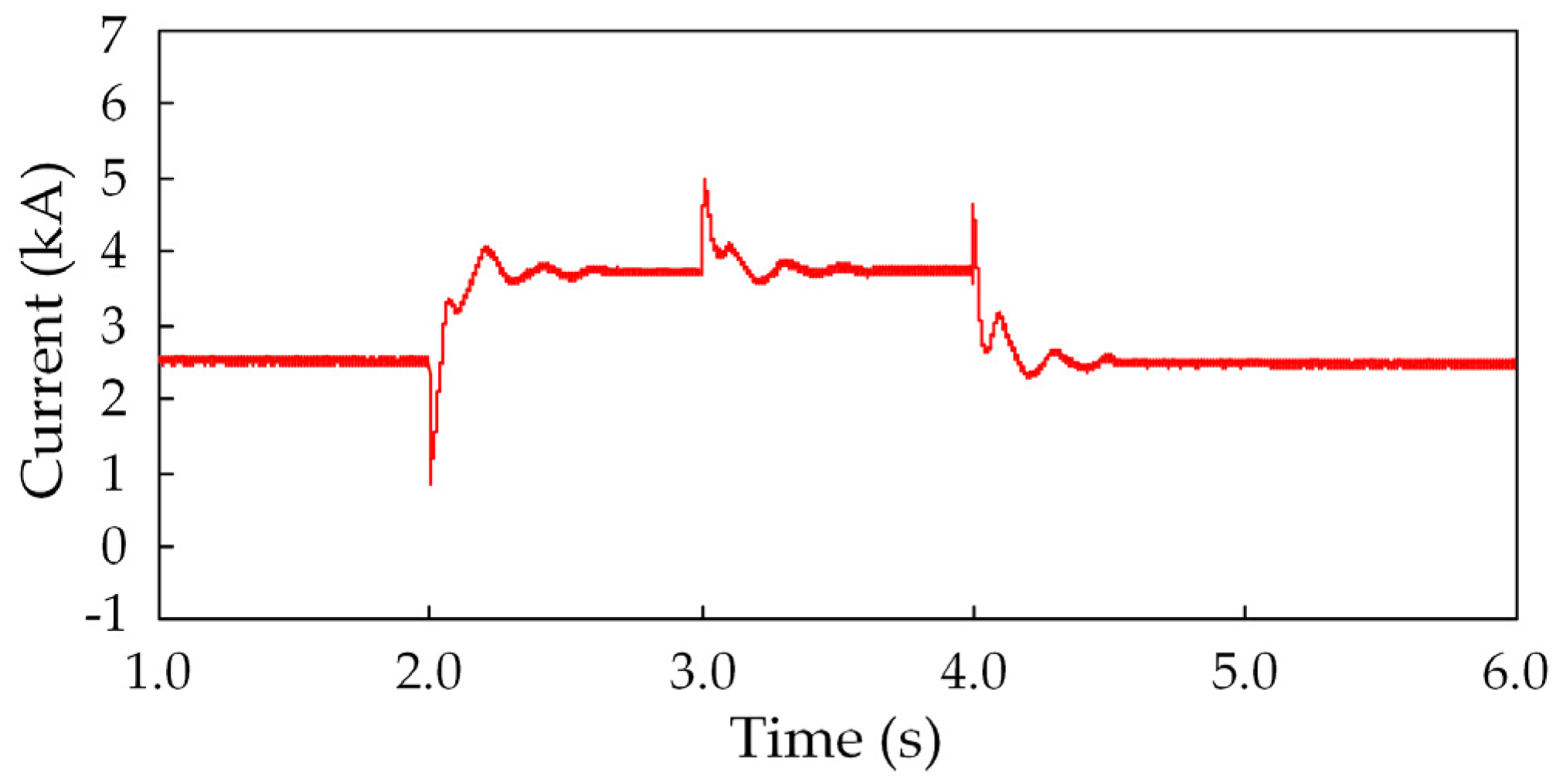
4.1. Verification of Power Coordinated Control
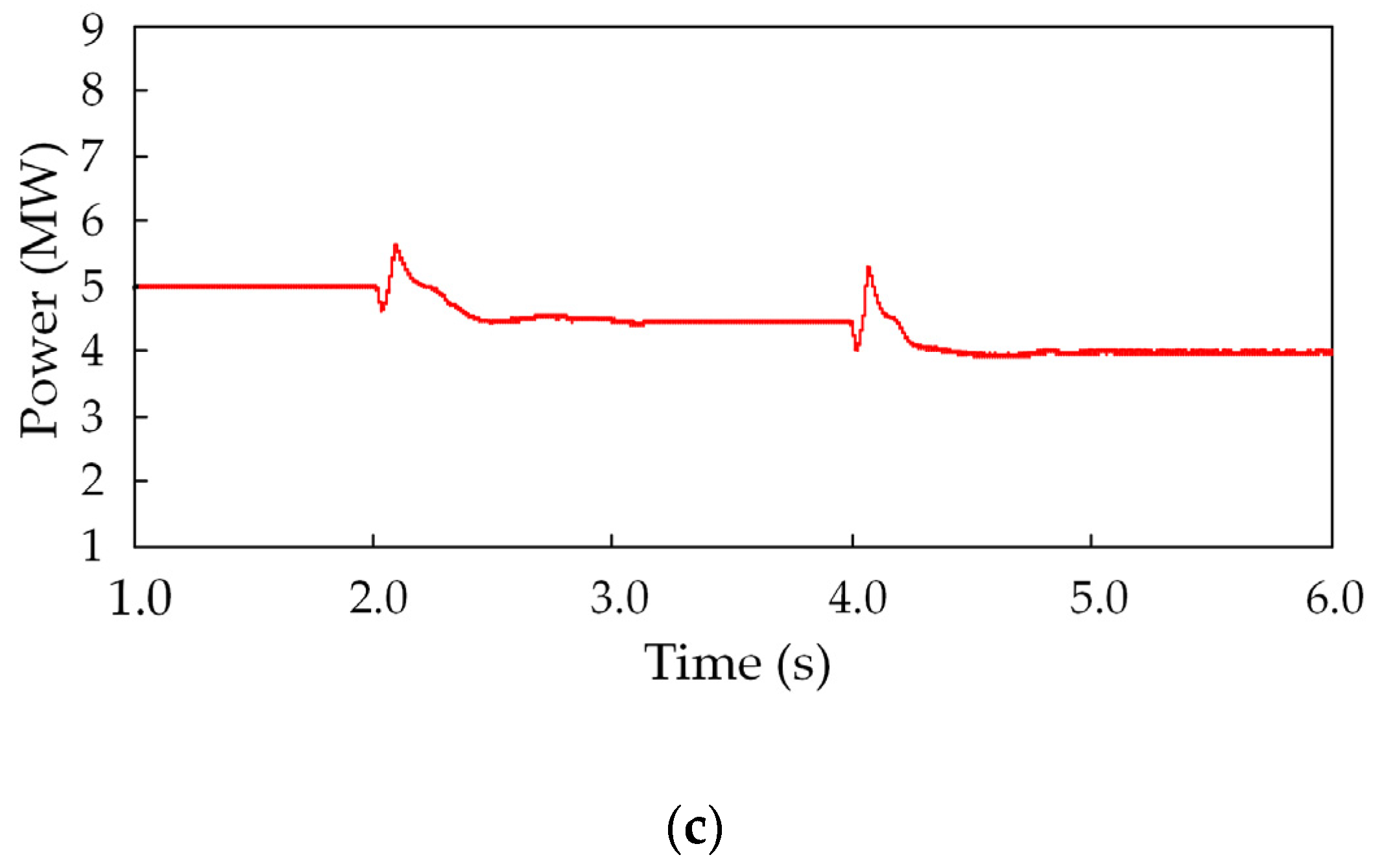
- At t < 2 s, the reactive power Q at the input stage is set to 0, and the active power of AC port (P1) and DC port (P2) at the output stage are 3 MW and 1 MW, respectively;
- At t = 2 s, P2 increases to 1.5 MW;
- At t = 3 s, P1 increases to 3.5 MW;
- At t = 4 s, P1 and P2 decrease to 3 MW and 1 MW, respectively;
- At t = 5 s, Q decreases to −1 Mvar.
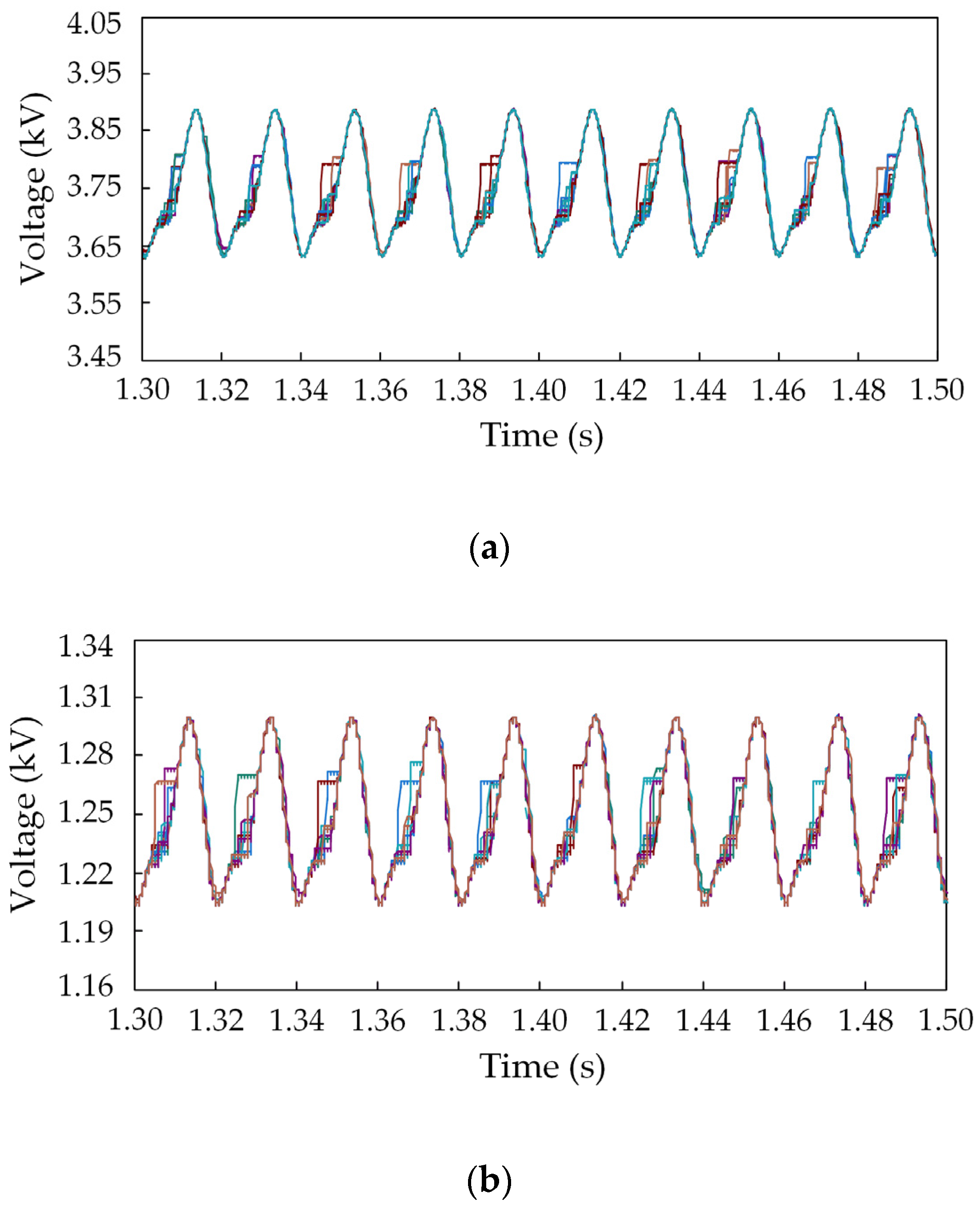
4.2. Verification of PFR
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cao, J.W.; Meng, K.; Wang, J.Y.; Yang, M.B.; Chen, Z.; Li, W.Z.; Lin, C. An energy internet and energy routers. Sci. Sinica Inform. 2014, 44, 714–727. [Google Scholar]
- Huang, A.Q.; Crow, M.L.; Heydt, G.T.; Zheng, J.P.; Dale, S.J. The Future Renewable Electric Energy Delivery and Management (FREEDM) System: The Energy Internet. Proc. IEEE 2011, 99, 133–148. [Google Scholar] [CrossRef]
- Bifaretti, S.; Zanchetta, P.; Watson, A.; Tarisciotti, L.; Clare, J.C. Advanced power electronic conversion and control system for universal and flexible power management. IEEE Trans. Smart Grid 2011, 2, 231–243. [Google Scholar] [CrossRef]
- Brando, G.; Bova, B.; Cervone, A.; Dannier, A.; Del Pizzo, A. A Distribution Power Electronic Transformer with MMC. Appl. Sci. 2018, 8, 120. [Google Scholar] [CrossRef]
- Zhang, G.; Chen, J.; Zhang, B.; Zhang, Y. A critical topology review of power electronic transformers: In view of efficiency. Chin. J. Electr. Eng. 2018, 4, 90–95. [Google Scholar]
- Huang, A.Q. Medium-voltage solid-state transformer: Technology for a smarter and resilient grid. IEEE Ind. Electron. Mag. 2016, 10, 29–42. [Google Scholar] [CrossRef]
- Briz, F.; Lopez, M.; Rodriguez, A.; Arias, M. Modular power electronic transformers: Modular multilevel converter versus cascaded H-bridge solutions. IEEE Ind. Electron. Mag. 2016, 10, 6–19. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, D.; Wang, Y.; Wu, B.; Athab, H.S. Power and voltage balance control of a novel three-phase solid-state transformer using multilevel cascaded H-bridge inverters for microgrid applications. IEEE Trans. Power Electron. 2016, 31, 3289–3301. [Google Scholar] [CrossRef]
- Morawiec, M.; Lewicki, A. Power electronic transformer based on cascaded H-bridge converter. Bull. Pol. Acad. Sci. Techn. Sci. 2017, 65, 675–683. [Google Scholar] [CrossRef]
- Huber, J.E.; Kolar, J.W. Solid-state transformers: On the origins and evolution of key concepts. IEEE Ind. Electron. Mag. 2016, 10, 19–28. [Google Scholar] [CrossRef]
- Zhao, T.; Wang, G.; Bhattacharya, S.; Huang, A.Q. Voltage and power balance control for a cascaded H-bridge converter-based solid-state transformer. IEEE Trans. Power Electron. 2013, 28, 1523–1532. [Google Scholar] [CrossRef]
- Fan, B.; Li, Y.; Wang, K.; Zheng, Z.; Xu, L. Hierarchical System Design and Control of an MMC-Based Power-Electronic Transformer. IEEE Trans. Ind. Inform. 2017, 13, 238–247. [Google Scholar] [CrossRef]
- Zixin, L.; Ping, W.; Zunfang, C.; Haibin, Z.; Yaohua, L. Research on medium-and high-voltage smart distribution grid oriented power electronic transformer. Power Syst. Technol. 2013, 37, 2592–2601. [Google Scholar]
- Li, Y.; Han, J.; Cao, Y.; Li, Y.; Xiong, J.; Sidorov, D.; Panasetsky, D. A modular multilevel converter type solid state transformer with internal model control method. Int. J. Electr. Power Energy Syst. 2017, 85, 153–163. [Google Scholar] [CrossRef]
- Contreras, J.P.; Ramirez, J.M. Multi-Fed Power Electronic Transformer for Use in Modern Distribution Systems. IEEE Trans. Smart Grid 2014, 5, 1532–1541. [Google Scholar] [CrossRef]
- Gu, C.; Zheng, Z.; Xu, L.; Wang, K.; Li, Y. Modeling and control of a multiport power electronic transformer (PET) for electric traction applications. IEEE Trans. Power Electron. 2016, 31, 915–927. [Google Scholar] [CrossRef]
- Rodrigues, W.; Oliveira, T.; Morais, L.; Rosa, A. Voltage and Power Balance Strategy without Communication for a Modular Solid State Transformer Based on Adaptive Droop Control. Energies 2018, 11, 1802. [Google Scholar] [CrossRef]
- Liu, B.; Zha, Y.; Zhang, T. DQ frame predictive current control methods for inverter stage of solid state transformer. IET Power Electron. 2017, 10, 687–696. [Google Scholar] [CrossRef]
- Moranchel, M.; Huerta, F.; Sanz, I.; Bueno, E.; Rodríguez, F.J. A comparison of modulation techniques for modular multilevel converters. Energies 2016, 9, 1091. [Google Scholar] [CrossRef]
- Wang, J.; Ma, H.; Bai, Z. A Submodule Fault Ride-Through Strategy for Modular Multilevel Converters With Nearest Level Modulation. IEEE Trans. Power Electron. 2018, 33, 1597–1608. [Google Scholar] [CrossRef]
- Chen, W.; Ruan, X.; Yan, H.; Tse, C.K. DC/DC conversion systems consisting of multiple converter modules: Stability, control, and experimental verifications. IEEE Trans. Power Electron. 2009, 24, 1463–1474. [Google Scholar] [CrossRef]
- Cao, Y.; Yuan, L.; Zhu, S.; Huang, R.; Feng, G.; Zhao, Z. Parameter design of energy router orienting energy internet. Power Syst. Technol. 2015, 39, 3094G3101. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Grid-side filter inductance LS/mH | 20 |
| Grid-side filter resistance RS/Ω | 0.1 |
| Arm inductance L0/mH | 8 |
| SM capacitance CSM/μF | 750 |
| DC side voltage Udc/kV | 60 |
| Virtual inertia of VSM J/(kg·m2) | 0.3 |
| Virtual damping of VSM D/(N·m·s/rad) | 10 |
| Voltage control coefficient kv | 0.2 |
| Reactive power control coefficient kq | 0.08 |
| Parameter | Value of AC Port | Value of DC Port |
|---|---|---|
| HV-side DC link capacitance CH/μF | 750 | 750 |
| LV-side DC link capacitance CL/μF | 450 | 450 |
| Transformer operating frequency/kHz | 3 | 3 |
| LV-side capacitance voltage/kV | 1.25 | 0.7 |
| P-f droop coefficient kf | \ | 20 |
| Number of DAB | 12 | 4 |
| Transformation ratio | 3:1 | 75:14 |
| Parameter | Value |
|---|---|
| Filter resistance of AC port R1/Ω | 0.1 |
| Filter inductance of AC port L1/mH | 5 |
| Arm inductance of AC port L0/mH | 6 |
| SM capacitance of AC port CSM/μF | 450 |
| Filter capacitance of DC port C2/mF | 2 |
| Filter inductance of DC port L2/mH | 10 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rong, J.; Ai, X.; Li, Y.; Ren, D. Research on the Structure and Control Strategy of a Novel Power Electronic Transformer for AC/DC Hybrid Distribution Network. Appl. Sci. 2019, 9, 727. https://doi.org/10.3390/app9040727
Rong J, Ai X, Li Y, Ren D. Research on the Structure and Control Strategy of a Novel Power Electronic Transformer for AC/DC Hybrid Distribution Network. Applied Sciences. 2019; 9(4):727. https://doi.org/10.3390/app9040727
Chicago/Turabian StyleRong, Jingguo, Xin Ai, Yunning Li, and Dapeng Ren. 2019. "Research on the Structure and Control Strategy of a Novel Power Electronic Transformer for AC/DC Hybrid Distribution Network" Applied Sciences 9, no. 4: 727. https://doi.org/10.3390/app9040727
APA StyleRong, J., Ai, X., Li, Y., & Ren, D. (2019). Research on the Structure and Control Strategy of a Novel Power Electronic Transformer for AC/DC Hybrid Distribution Network. Applied Sciences, 9(4), 727. https://doi.org/10.3390/app9040727