A New Multi-Objective Unit Commitment Model Solved by Decomposition-Coordination

Abstract
:1. Introduction
2. Model
2.1. Objective Functions
2.2. Constraints
- System power balance
- (a)
- For any given time intervals, the total power production must equal to the overall loads.is the load demand at time interval t.
- (b)
- System reserve constraintsDuring each time interval, sufficient spinning reserve must be available.where is the spinning reserve requirement at time t, and is the rated upper generation limit of unit i. In our numerical examples. is set to 0.05 times of .
- Unit constraints
- (a)
- Generation limitswhere is the rated lower generation limit of unit i.
- (b)
- Unit minimum up/down time, are minimum up/down time for unit i, and are the time the unit i has been running before t.
- (c)
- Unit ramp constraintsWe assume that the ramp constraint can always be met when .
- Binary constraint
- Tie-line constraintThe tie-line between subsystems should not be overloaded. The power flow of tie-line is defined as a sequence , and the tie-line power flow in any time interval should not exceed .
2.3. Multi-Objectives Model
3. Methodology
- Step 1:
- Initialize tie-line based on the total capability and local load in each subsystem.
- Step 2:
- Update virtual load in each subsystem based on tie-line.
- Step 3:
- Solve local MOUC problem in each subsystem and calculate MP.
- Step 4:
- Update tie-line based on MP and local load in subsystems.
- Step 5:
- If the stop criterion is met, the algorithm is terminated and the UC schedule is returned, otherwise, return to Step 3.
3.1. Initialize Tie-Line
- The total generation level in any pairs of subsystems depends on the total capability in each subsystem.The priority of these conditions is 1, 2.
3.2. Update Virtual Load
3.3. Calculate local MOUC
| Algorithm 1 Calculate multi-objective margin price in subsystem i |
| j is the index of unit in subsystem i is the scheduled output of unit j at time t 100,000 initialize
|
3.4. Update Tie-Line Power Flow
- For any given time interval, the change of tie-line should decrease the total MOUC cost in the whole system. As the has been calculated in the previous step, the subsystem with high should generate less, and tie-line power flow could be updated as follows.is the step change which should be added to .is the change of at time t. We assumes that if the change of system load did not exceed , the would be seen as constant. As a result, the objective of (20) represents the increase of total MOUC cost in the whole system.
- However, must be chosen to update the tie-line power flow. could neither be too big nor too small. A big may cause the total MOUC cost to increase, because the direction is a decent direction only if the is not too big in any time interval. Furthermore, a small may lead to the total MOUC cost to be almost invariant, or will not encourage more units to be on. Here, is chosen based on the following rules.
- (a)
- The would be big, if the difference of margin price between the two subsystems is significant.
- (b)
- The shall not only meet the tie-line constraint, but also ensure that it does not exceed a certain percentage of the local load of the two subsystems to which tie-line is connected.represents the percentage of load allowed to be changed.
- (c)
The algorithm of choosing the could be stated as follows.
| Algorithm 2 Find the for subsystem i at time t |
| Input: system index i and time t get the UC schedule during last iteration , where k is the index of unit in subsystem i
|
3.5. Stop Criterion
- If is met at all time intervals and (there exists a tie-line between subsystem i and j), or the change MOUC cost is almost invariant, the iteration process is terminated.
- If the tie-line power flow has reached its limit or the maximum number of iterations been reached, stops updating the tie-line.
- When the subsystem spinning reserve has been reached and the of that subsystem is still low, which means, if the tie-line encourages the generation of that subsystem to be decreased, the total MOUC cost would increase, but the generation should not be increased. So the attached tie-line should not be updated anymore.
- If the margin unit in the last iteration step has been scheduled to generate at its full capacity, the margin unit will be changed, and there will be a gap of the . The (29) could also be positive because the if the generation of new margin unit is increased, is increased, and if the of the system is decreased, margin unit would be switched to that in the last iteration step, the is decreased.
- If the margin unit has been changed and the margin unit in the last iteration step has not reached its generation limit, the (29) will not be consistent, but it is still positive.
4. Numerical Examples
4.1. 46 Units Test
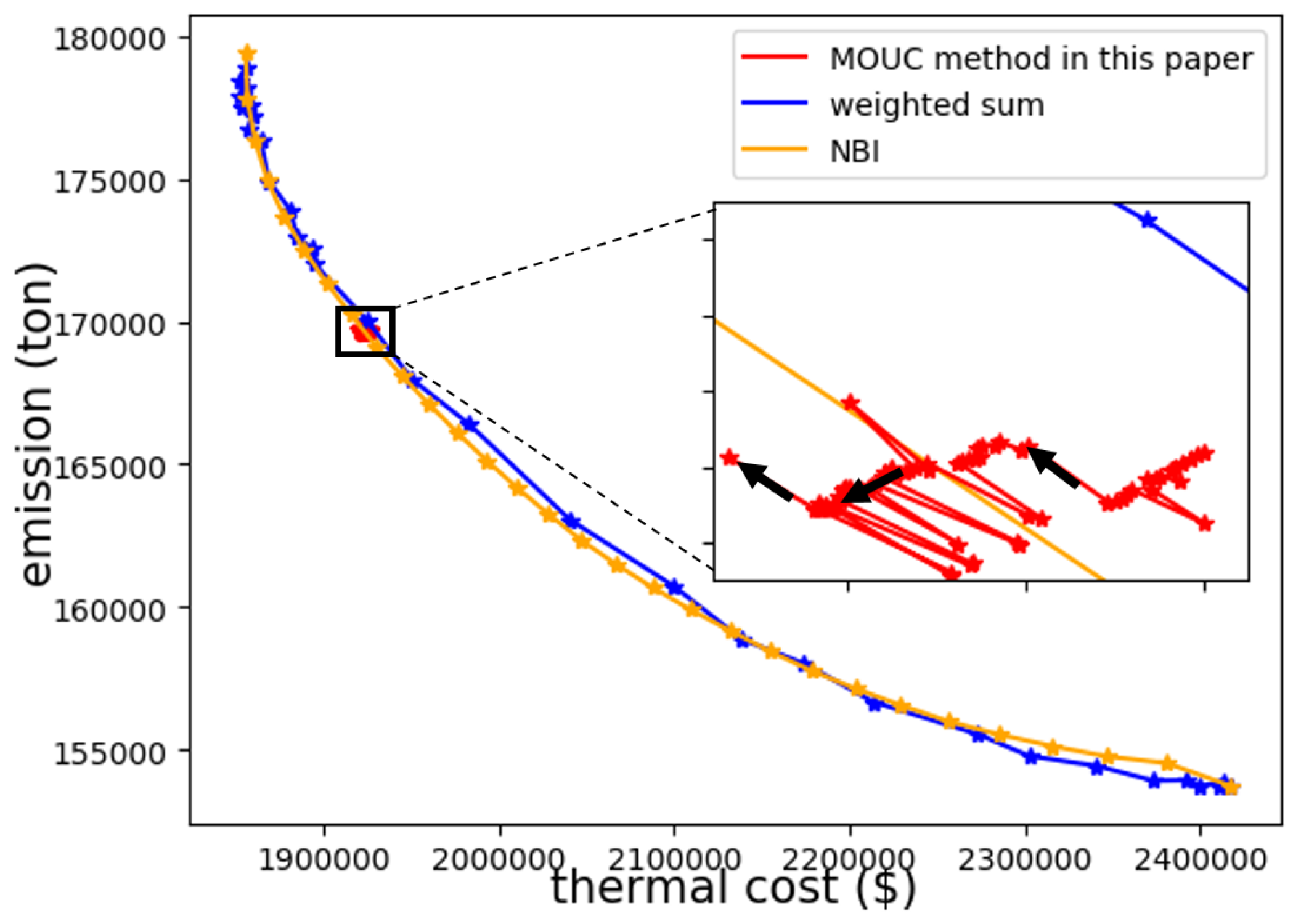
4.2. Comparing with Other Methods
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | (MW) | (MW) | ICT (h) | (MW/h) | (h) | (h) | (h) |
|---|---|---|---|---|---|---|---|
| 1 | 455.0 | 150.0 | 8.0 | 150.0 | 8.0 | 8.0 | 4.0 |
| 2 | 455.0 | 150.0 | 8.0 | 150.0 | 8.0 | 8.0 | 4.0 |
| 3 | 130.0 | 20.0 | −5.0 | 40.0 | 5.0 | 5.0 | 2.0 |
| 4 | 130.0 | 20.0 | −5.0 | 40.0 | 5.0 | 5.0 | 2.0 |
| 5 | 162.0 | 25.0 | −6.0 | 45.0 | 6.0 | 5.0 | 2.0 |
| 6 | 80.0 | 20.0 | −3.0 | 20.0 | 3.0 | 3.0 | 1.0 |
| 7 | 85.0 | 25.0 | −3.0 | 25.0 | 3.0 | 3.0 | 1.0 |
| 8 | 55.0 | 10.0 | −1.0 | 15.0 | 1.0 | 1.0 | 0.0 |
| 9 | 55.0 | 10.0 | −1.0 | 15.0 | 1.0 | 1.0 | 0.0 |
| 10 | 55.0 | 10.0 | −1.0 | 15.0 | 1.0 | 1.0 | 0.0 |
| Index | (MW) | (MW) | ICT (h) | (MW/h) | (h) | (h) | (h) |
|---|---|---|---|---|---|---|---|
| 1 | 12.0 | 2.4 | −1.0 | 12.0 | 1.0 | 1.0 | 0.0 |
| 2 | 20.0 | 4.0 | −1.0 | 20.0 | 1.0 | 1.0 | 0.0 |
| 3 | 20.0 | 4.0 | −1.0 | 20.0 | 1.0 | 1.0 | 0.0 |
| 4 | 20.0 | 4.0 | −1.0 | 20.0 | 1.0 | 1.0 | 0.0 |
| 5 | 20.0 | 4.0 | −1.0 | 20.0 | 1.0 | 1.0 | 0.0 |
| 6 | 20.0 | 4.0 | −1.0 | 20.0 | 1.0 | 1.0 | 0.0 |
| 7 | 20.0 | 4.0 | −1.0 | 20.0 | 1.0 | 1.0 | 0.0 |
| 8 | 76.0 | 15.2 | 3.0 | 38.0 | 3.0 | 2.0 | 1.0 |
| 9 | 76.0 | 15.2 | 3.0 | 38.0 | 3.0 | 2.0 | 1.0 |
| 10 | 76.0 | 15.2 | 3.0 | 38.0 | 3.0 | 2.0 | 1.0 |
| 11 | 76.0 | 15.2 | 3.0 | 38.0 | 3.0 | 2.0 | 1.0 |
| 12 | 100.0 | 25.0 | 5.0 | 50.0 | 4.0 | 2.0 | 1.0 |
| 13 | 100.0 | 25.0 | 5.0 | 50.0 | 4.0 | 2.0 | 1.0 |
| 14 | 100.0 | 25.0 | 5.0 | 50.0 | 4.0 | 2.0 | 1.0 |
| 15 | 100.0 | 25.0 | −3.0 | 50.0 | 4.0 | 2.0 | 1.0 |
| 16 | 100.0 | 25.0 | −3.0 | 50.0 | 4.0 | 2.0 | 1.0 |
| 17 | 100.0 | 25.0 | −3.0 | 50.0 | 4.0 | 2.0 | 1.0 |
| 18 | 100.0 | 25.0 | −3.0 | 50.0 | 4.0 | 2.0 | 1.0 |
| 19 | 155.0 | 54.25 | 5.0 | 77.5 | 5.0 | 3.0 | 1.0 |
| 20 | 155.0 | 54.25 | 5.0 | 77.5 | 5.0 | 3.0 | 1.0 |
| 21 | 155.0 | 54.25 | 5.0 | 77.5 | 5.0 | 3.0 | 1.0 |
| 22 | 197.0 | 68.95 | −4.0 | 98.5 | 5.0 | 4.0 | 2.0 |
| 23 | 197.0 | 68.95 | −4.0 | 98.5 | 5.0 | 4.0 | 2.0 |
| 24 | 197.0 | 68.95 | −4.0 | 98.5 | 5.0 | 4.0 | 2.0 |
| 25 | 197.0 | 68.95 | −4.0 | 98.5 | 5.0 | 4.0 | 2.0 |
| 26 | 197.0 | 68.95 | −4.0 | 98.5 | 5.0 | 4.0 | 2.0 |
| 27 | 197.0 | 68.95 | −4.0 | 98.5 | 5.0 | 4.0 | 2.0 |
| 28 | 350.0 | 140.0 | 10.0 | 175.0 | 8.0 | 5.0 | 2.0 |
| 29 | 350.0 | 140.0 | 10.0 | 175.0 | 8.0 | 5.0 | 2.0 |
| 30 | 350.0 | 140.0 | 10.0 | 175.0 | 8.0 | 5.0 | 2.0 |
| 31 | 350.0 | 140.0 | 10.0 | 175.0 | 8.0 | 5.0 | 2.0 |
| 32 | 400.0 | 100.0 | 10.0 | 200.0 | 8.0 | 5.0 | 2.0 |
| 33 | 400.0 | 100.0 | 10.0 | 200.0 | 8.0 | 5.0 | 2.0 |
| 34 | 400.0 | 100.0 | 10.0 | 200.0 | 8.0 | 5.0 | 2.0 |
| 35 | 400.0 | 100.0 | 10.0 | 200.0 | 8.0 | 5.0 | 2.0 |
| 36 | 400.0 | 100.0 | 10.0 | 200.0 | 8.0 | 5.0 | 2.0 |
| Index | a | b /MW) | c | d (t/ | e (t/MW) | f (t) | ||
|---|---|---|---|---|---|---|---|---|
| 1 | 0.00048 | 16.19 | 1000.0 | 4500.0 | 9000.0 | 0.002 | 0.52 | 29.4 |
| 2 | 0.00031 | 17.26 | 970.0 | 5000.0 | 10000.0 | 0.0022 | 0.52 | 30.5 |
| 3 | 0.002 | 16.6 | 700.0 | 550.0 | 1100.0 | 0.0026 | 0.52 | 29.5 |
| 4 | 0.00211 | 16.5 | 680.0 | 560.0 | 1120.0 | 0.003 | 0.45 | 31.5 |
| 5 | 0.00398 | 19.7 | 450.0 | 900.0 | 1800.0 | 0.0045 | 0.574 | 28.4 |
| 6 | 0.00712 | 22.26 | 370.0 | 170.0 | 340.0 | 0.004 | 0.483 | 28.5 |
| 7 | 0.00079 | 27.74 | 480.0 | 260.0 | 520.0 | 0.0034 | 0.53 | 28.8 |
| 8 | 0.00414 | 25.92 | 660.0 | 30.0 | 60.0 | 0.007 | 0.3 | 29.5 |
| 9 | 0.00222 | 27.27 | 665.0 | 30.0 | 60.0 | 0.0068 | 0.34 | 38.8 |
| 10 | 0.00173 | 27.79 | 670.0 | 30.0 | 60.0 | 0.0055 | 0.3 | 33.8 |
| Index | a | b /MW) | c | d (t/ | e (t/MW) | f (t) | ||
|---|---|---|---|---|---|---|---|---|
| 1 | 0.02533 | 25.5472 | 24.3891 | 0.0 | 0.0 | 0.0055 | 0.3 | 33.8 |
| 2 | 0.01561 | 37.9637 | 118.9083 | 30.0 | 60.0 | 0.0055 | 0.3 | 33.8 |
| 3 | 0.01359 | 37.777 | 118.4576 | 30.0 | 60.0 | 0.0055 | 0.3 | 33.8 |
| 4 | 0.0116 | 37.9637 | 118.9083 | 30.0 | 60.0 | 0.0055 | 0.3 | 33.8 |
| 5 | 0.01059 | 38.777 | 119.4576 | 30.0 | 60.0 | 0.0055 | 0.3 | 33.8 |
| 6 | 0.01199 | 37.551 | 117.7551 | 30.0 | 60.0 | 0.0055 | 0.3 | 33.8 |
| 7 | 0.01261 | 37.6637 | 118.1083 | 30.0 | 60.0 | 0.0055 | 0.3 | 33.8 |
| 8 | 0.00962 | 13.5073 | 81.1364 | 80.0 | 160.0 | 0.004 | 0.483 | 28.5 |
| 9 | 0.00876 | 13.3272 | 81.1364 | 80.0 | 160.0 | 0.004 | 0.483 | 28.5 |
| 10 | 0.00895 | 13.3538 | 81.298 | 80.0 | 160.0 | 0.004 | 0.483 | 28.5 |
| 11 | 0.00932 | 13.4073 | 81.6259 | 80.0 | 160.0 | 0.004 | 0.483 | 28.5 |
| 12 | 0.00623 | 18.0 | 217.8952 | 100.0 | 200.0 | 0.0026 | 0.52 | 29.5 |
| 13 | 0.00599 | 18.6 | 219.7752 | 100.0 | 200.0 | 0.0026 | 0.52 | 29.5 |
| 14 | 0.00612 | 18.1 | 218.335 | 100.0 | 200.0 | 0.0026 | 0.52 | 29.5 |
| 15 | 0.00588 | 18.28 | 216.7752 | 100.0 | 200.0 | 0.0026 | 0.52 | 29.5 |
| 16 | 0.00598 | 18.28 | 216.7752 | 100.0 | 200.0 | 0.0026 | 0.52 | 29.5 |
| 17 | 0.00578 | 17.28 | 216.7752 | 100.0 | 200.0 | 0.0026 | 0.52 | 29.5 |
| 18 | 0.00698 | 19.2 | 218.7752 | 100.0 | 200.0 | 0.0026 | 0.52 | 29.5 |
| 19 | 0.00473 | 10.7154 | 143.0288 | 200.0 | 400.0 | 0.0026 | 0.52 | 29.5 |
| 20 | 0.00481 | 10.7367 | 143.3179 | 200.0 | 400.0 | 0.0026 | 0.52 | 29.5 |
| 21 | 0.00487 | 10.7583 | 143.5972 | 200.0 | 400.0 | 0.0026 | 0.52 | 29.5 |
| 22 | 0.00259 | 23.0 | 259.131 | 300.0 | 600.0 | 0.0026 | 0.52 | 29.5 |
| 23 | 0.0026 | 23.1 | 259.649 | 300.0 | 600.0 | 0.0026 | 0.52 | 29.5 |
| 24 | 0.00263 | 23.2 | 260.176 | 300.0 | 600.0 | 0.0026 | 0.52 | 29.5 |
| 25 | 0.00264 | 23.4 | 260.576 | 300.0 | 600.0 | 0.0026 | 0.52 | 29.5 |
| 26 | 0.00267 | 23.5 | 261.176 | 300.0 | 600.0 | 0.0026 | 0.52 | 29.5 |
| 27 | 0.00261 | 23.04 | 260.076 | 300.0 | 600.0 | 0.0026 | 0.52 | 29.5 |
| 28 | 0.0015 | 10.8416 | 176.0575 | 500.0 | 1000.0 | 0.002 | 0.52 | 29.4 |
| 29 | 0.00153 | 10.8616 | 177.0575 | 500.0 | 1000.0 | 0.002 | 0.52 | 29.4 |
| 30 | 0.00143 | 10.6616 | 176.0575 | 500.0 | 1000.0 | 0.002 | 0.52 | 29.4 |
| 31 | 0.00163 | 10.9616 | 177.9575 | 500.0 | 1000.0 | 0.002 | 0.52 | 29.4 |
| 32 | 0.00194 | 7.4921 | 310.0021 | 800.0 | 1600.0 | 0.002 | 0.52 | 29.4 |
| 33 | 0.00195 | 7.5031 | 311.9102 | 800.0 | 1600.0 | 0.002 | 0.52 | 29.4 |
| 34 | 0.00196 | 7.5121 | 312.9102 | 800.0 | 1600.0 | 0.002 | 0.52 | 29.4 |
| 35 | 0.00197 | 7.5321 | 314.9102 | 800.0 | 1600.0 | 0.002 | 0.52 | 29.4 |
| 36 | 0.00199 | 7.6121 | 313.9102 | 800.0 | 1600.0 | 0.002 | 0.52 | 29.4 |
| 10 Units System | 36 Units System | ||
|---|---|---|---|
| Time | Load | Time | Load |
| (h) | (MW) | (h) | (MW) |
| 1 | 700.0 | 1 | 4242 |
| 2 | 750.0 | 2 | 3916 |
| 3 | 850.0 | 3 | 3698 |
| 4 | 950.0 | 4 | 3589 |
| 5 | 1000.0 | 5 | 3481 |
| 6 | 1100.0 | 6 | 3484 |
| 7 | 1150.0 | 7 | 3589 |
| 8 | 1200.0 | 8 | 3807 |
| 9 | 1300.0 | 9 | 4351 |
| 10 | 1400.0 | 10 | 4786 |
| 11 | 1450.0 | 11 | 4895 |
| 12 | 1500.0 | 12 | 4950 |
| 13 | 1400.0 | 13 | 4895 |
| 14 | 1300.0 | 14 | 4789 |
| 15 | 1200.0 | 15 | 4732 |
| 16 | 1050.0 | 16 | 4732 |
| 17 | 1000.0 | 17 | 4950 |
| 18 | 1100.0 | 18 | 5438 |
| 19 | 1200.0 | 19 | 5385 |
| 20 | 1400.0 | 20 | 5276 |
| 21 | 1300.0 | 21 | 5112 |
| 22 | 1100.0 | 22 | 5003 |
| 23 | 900.0 | 23 | 4732 |
| 24 | 800.0 | 24 | 4406 |
References
- Frangioni, A.; Gentile, C. Solving nonlinear single-unit commitment problems with ramping constraints. Oper. Res. 2006, 54, 767–775. [Google Scholar] [CrossRef]
- Guan, X.; Zhai, Q.; Papalexopoulos, A. Optimization based methods for unit commitment: Lagrangian relaxation versus general mixed integer programming. In Proceedings of the Power Engineering Society General Meeting, Toronto, ON, Canada, 13–17 July 2003; Volume 2, pp. 1095–1100. [Google Scholar]
- Johnson, R.; Happ, H.; Wright, W. Large scale hydro-thermal unit commitment-method and results. IEEE Trans. Power Appar. Syst. 1971, PAS-90, 1373–1384. [Google Scholar] [CrossRef]
- Bertsekas, D.P.; Bertsekas, D.P.; Bertsekas, D.P.; Bertsekas, D.P. Dynamic Programming and Optimal Control; Athena Scientific: Belmont, MA, USA, 1995; Volume 1. [Google Scholar]
- Zhai, Q.; Guan, X.; Cui, J. Unit commitment with identical units successive subproblem solving method based on Lagrangian relaxation. IEEE Trans. Power Syst. 2002, 17, 1250–1257. [Google Scholar] [CrossRef] [Green Version]
- Morales-España, G.; Latorre, J.M.; Ramos, A. Tight and compact MILP formulation for the thermal unit commitment problem. IEEE Trans. Power Syst. 2013, 28, 4897–4908. [Google Scholar] [CrossRef]
- Alemany, J.; Magnago, F.; Moitre, D.; Pinto, H. Symmetry issues in mixed integer programming based Unit Commitment. Int. J. Electr. Power Energy Syst. 2014, 54, 86–90. [Google Scholar] [CrossRef]
- Lei, X.; Guan, X.; Zhai, Q. Constructing Valid Inequalities by Analytical Feasibility Conditions on Unit Commitment with Transmission Constraints. IEEE Trans. Power Syst. 2016, 31, 3484–3494. [Google Scholar] [CrossRef]
- Pan, K.; Guan, Y.; Watson, J.P.; Wang, J. Strengthened MILP Formulation for Certain Gas Turbine Unit Commitment Problems. IEEE Trans. Power Syst. 2016, 31, 1440–1448. [Google Scholar] [CrossRef]
- Todosijevic, R.; Mladenovic, M.; Hanafi, S.; Mladenovic, N.; Crevits, I. Adaptive general variable neighborhood search heuristics for solving the unit commitment problem. Int. J. Electr. Power Energy Syst. 2016, 78, 873–883. [Google Scholar] [CrossRef]
- Wang, C.; Fu, Y. Fully parallel stochastic security-constrained unit commitment. IEEE Trans. Power Syst. 2016, 31, 3561–3571. [Google Scholar] [CrossRef]
- Trivedi, A.; Srinivasan, D.; Pal, K.; Saha, C.; Reindl, T. Enhanced multiobjective evolutionary algorithm based on decomposition for solving the unit commitment problem. IEEE Trans. Ind. Inform. 2015, 11, 1346–1357. [Google Scholar] [CrossRef]
- Nemati, M.; Braun, M.; Tenbohlen, S. Optimization of unit commitment and economic dispatch in microgrids based on genetic algorithm and mixed integer linear programming. Appl. Energy 2018, 210, 944–963. [Google Scholar] [CrossRef]
- Shukla, A.; Singh, S. Advanced three-stage pseudo-inspired weight-improved crazy particle swarm optimization for unit commitment problem. Energy 2016, 96, 23–36. [Google Scholar] [CrossRef]
- Trivedi, A.; Srinivasan, D.; Biswas, S.; Reindl, T. A genetic algorithm–differential evolution based hybrid framework: case study on unit commitment scheduling problem. Inf. Sci. 2016, 354, 275–300. [Google Scholar] [CrossRef]
- Dhillon, J.; Parti, S.; Kothari, D. Stochastic economic emission load dispatch. Electric Power Syst. Res. 1993, 26, 179–186. [Google Scholar] [CrossRef]
- Yokoyama, R.; Bae, S.; Morita, T.; Sasaki, H. Multiobjective optimal generation dispatch based on probability security criteria. IEEE Trans. Power Syst. 1988, 3, 317–324. [Google Scholar] [CrossRef]
- Abido, M.A. Environmental/economic power dispatch using multiobjective evolutionary algorithms. IEEE Trans. Power Syst. 2003, 18, 1529–1537. [Google Scholar] [CrossRef]
- Wang, L.; Singh, C. Environmental/economic power dispatch using a fuzzified multi-objective particle swarm optimization algorithm. Electr. Power Syst. Res. 2007, 77, 1654–1664. [Google Scholar] [CrossRef]
- Cai, J.; Ma, X.; Li, Q.; Li, L.; Peng, H. A multi-objective chaotic ant swarm optimization for environmental/ economic dispatch. Int. J. Electr. Power Energy Syst. 2010, 32, 337–344. [Google Scholar] [CrossRef]
- Norouzi, M.R.; Ahmadi, A.; Nezhad, A.E.; Ghaedi, A. Mixed integer programming of multi-objective security-constrained hydro/thermal unit commitment. Renew. Sustain. Energy Rev. 2014, 29, 911–923. [Google Scholar] [CrossRef]
- Li, Y.F.; Pedroni, N.; Zio, E. A memetic evolutionary multi-objective optimization method for environmental power unit commitment. IEEE Trans. Power Syst. 2013, 28, 2660–2669. [Google Scholar] [CrossRef]
- Kockar, I. Unit commitment for combined pool/bilateral markets with emissions trading. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting—Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–9. [Google Scholar]
- Ma, H.; Shahidehpour, S. Transmission-constrained unit commitment based on Benders decomposition. Int. J. Electr. Power Energy Syst. 1998, 20, 287–294. [Google Scholar] [CrossRef]
- Maheswari, S.; Vijayalakshmi, C. A lagrangian decomposition model for unit commitment problem. Int. J. Comput. Appl. 2012, 43, 21–25. [Google Scholar] [CrossRef]
- Fu, Y.; Shahidehpour, M.; Li, Z. Long-term security-constrained unit commitment: Hybrid Dantzig-Wolfe decomposition and subgradient approach. IEEE Trans. Power Syst. 2005, 20, 2093–2106. [Google Scholar] [CrossRef]
- Li, M.Y.; Luh, P.B. A decentralized framework of unit commitment for future power markets. In Proceedings of the 2013 IEEE Power and Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5. [Google Scholar]
- Nedic, A. Asynchronous broadcast-based convex optimization over a network. IEEE Trans. Autom. Control 2011, 56, 1337–1351. [Google Scholar] [CrossRef]
- Trivedi, A.; Srinivasan, D.; Pal, K.; Reindl, T. A multiobjective evolutionary algorithm based on decomposition for unit commitment problem with significant wind penetration. In Proceedings of the 2016 IEEE Congress on Evolutionary Computation (CEC), Vancouver, BC, Canada, 24–29 July 2016; pp. 3939–3946. [Google Scholar]
- Younes, M.; Khodja, F.; Kherfane, R.L. Multi-objective economic emission dispatch solution using hybrid FFA (firefly algorithm) and considering wind power penetration. Energy 2014, 67, 595–606. [Google Scholar] [CrossRef]
- Albers, S.; Eilts, S.; Even-Dar, E.; Mansour, Y.; Roditty, L. On Nash equilibria for a network creation game. ACM Trans. Econ. Comput. 2014, 2, 89–98. [Google Scholar] [CrossRef]
- Carrión, M.; Arroyo, J.M. A computationally efficient mixed-integer linear formulation for the thermal unit commitment problem. IEEE Trans. Power Syst. 2006, 21, 1371–1378. [Google Scholar] [CrossRef]
- Qi, Y.; Zhang, Q.; Ma, X.; Quan, Y.; Miao, Q. Utopian point based decomposition for multi-objective optimization problems with complicated Pareto fronts. Appl. Soft Comput. 2017, 61, 844–859. [Google Scholar] [CrossRef]
- Cao, J.; Yan, Z.; He, G. Application of Multi-Objective Human Learning Optimization Method to Solve AC/DC Multi-Objective Optimal Power Flow Problem. Int. J. Emerg. Electr. Power Syst. 2016, 17, 327–337. [Google Scholar] [CrossRef]
- Virmani, S.; Adrian, E.C.; Imhof, K.; Mukherjee, S. Implementation of a Lagrangian relaxation based unit commitment problem. IEEE Trans. Power Syst. 1989, 4, 1373–1380. [Google Scholar] [CrossRef]
- Gent, M.; Lamont, J.W. Minimum-emission dispatch. IEEE Trans. Power Appar. Syst. 1971, PAS-90, 2650–2660. [Google Scholar] [CrossRef]
- Dhillon, J.; Parti, S.; Kothari, D. Fuzzy decision-making in stochastic multiobjective short-term hydrothermal scheduling. IEE Proc. Gener. Transm. Distrib. 2002, 149, 191–200. [Google Scholar] [CrossRef]
- Wang, H.; Xu, X.; Zheng, Y. Multi-Objective Optimization of Security Constrained Unit Commitment Model and Solution Considering Flexible Load. Power Syst. Technol. 2017, 41, 1904–1912. [Google Scholar]
- Ahmadi, A.; Moghimi, H.; Nezhad, A.E.; Agelidis, V.G.; Sharaf, A.M. Multi-objective economic emission dispatch considering combined heat and power by normal boundary intersection method. Electr. Power Syst. Res. 2015, 129, 32–43. [Google Scholar] [CrossRef]
- Zhang, X.-H.; Zhao, J.-Q. Unit commitment by enhanced adaptive Lagrangian relaxation. Proc. CSEE 2010, 30, 71–76. [Google Scholar]
- Ma, H.; Shahidehpour, S. Unit commitment with transmission security and voltage constraints. IEEE Trans. Power Syst. 1999, 14, 757–764. [Google Scholar] [CrossRef]
- Cireşan, D.; Meier, U.; Masci, J.; Schmidhuber, J. Multi-column deep neural network for traffic sign classification. Neural Netw. 2012, 32, 333–338. [Google Scholar] [CrossRef] [PubMed] [Green Version]





| Weighted Sum | NBI | MOUC Method in This Paper | |
|---|---|---|---|
| Time (S) | 1775 | 3647 | 1294 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhai, S.; Wang, Z.; Cao, J.; He, G. A New Multi-Objective Unit Commitment Model Solved by Decomposition-Coordination. Appl. Sci. 2019, 9, 829. https://doi.org/10.3390/app9050829
Zhai S, Wang Z, Cao J, He G. A New Multi-Objective Unit Commitment Model Solved by Decomposition-Coordination. Applied Sciences. 2019; 9(5):829. https://doi.org/10.3390/app9050829
Chicago/Turabian StyleZhai, Shaopeng, Zhihua Wang, Jia Cao, and Guangyu He. 2019. "A New Multi-Objective Unit Commitment Model Solved by Decomposition-Coordination" Applied Sciences 9, no. 5: 829. https://doi.org/10.3390/app9050829
APA StyleZhai, S., Wang, Z., Cao, J., & He, G. (2019). A New Multi-Objective Unit Commitment Model Solved by Decomposition-Coordination. Applied Sciences, 9(5), 829. https://doi.org/10.3390/app9050829