Nonlinear Extended-state ARX-Laguerre PI Observer Fault Diagnosis of Bearings



Abstract
:Featured Application
Abstract
1. Introduction
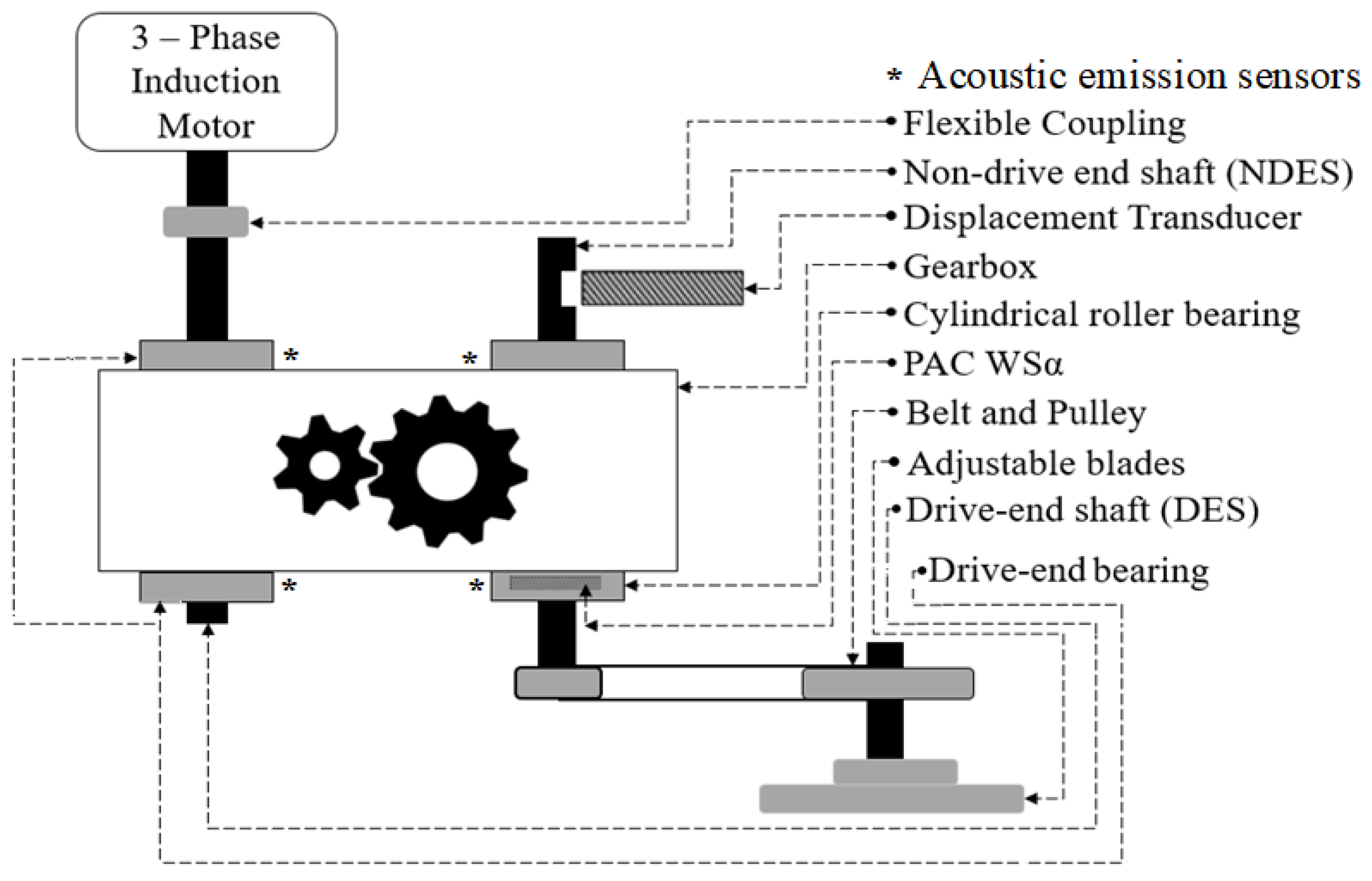
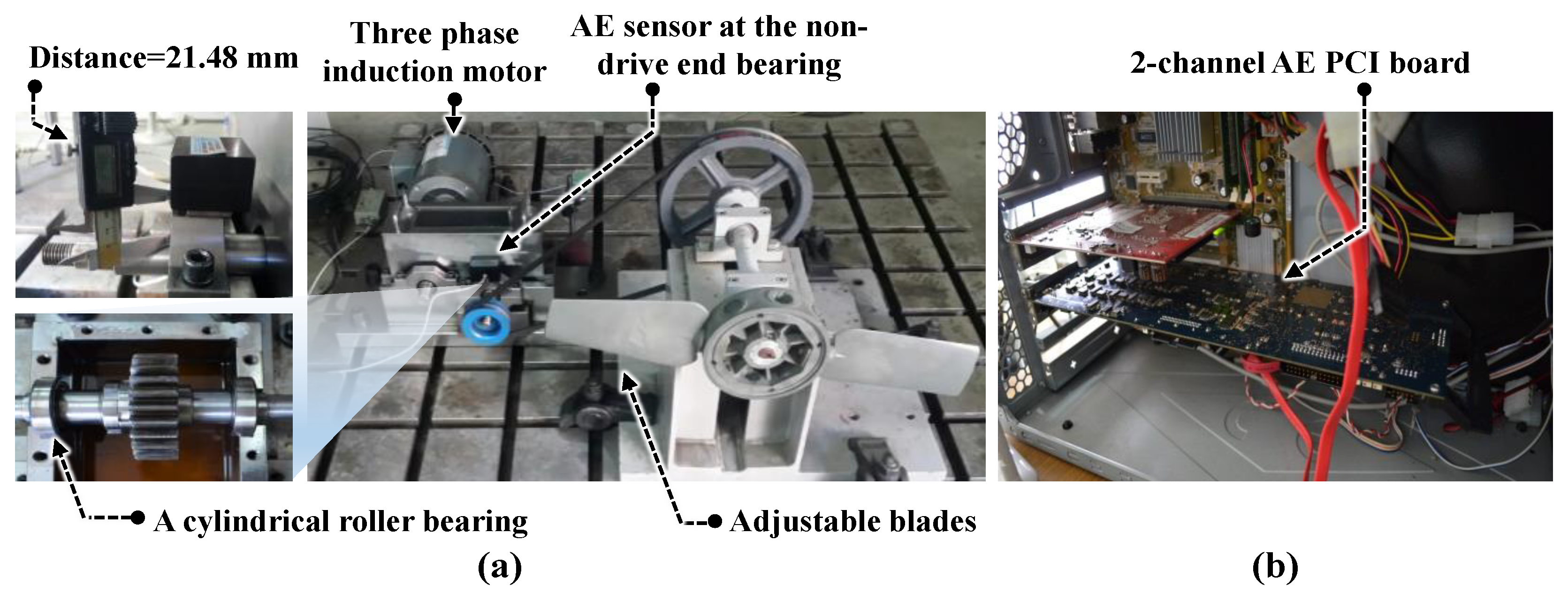
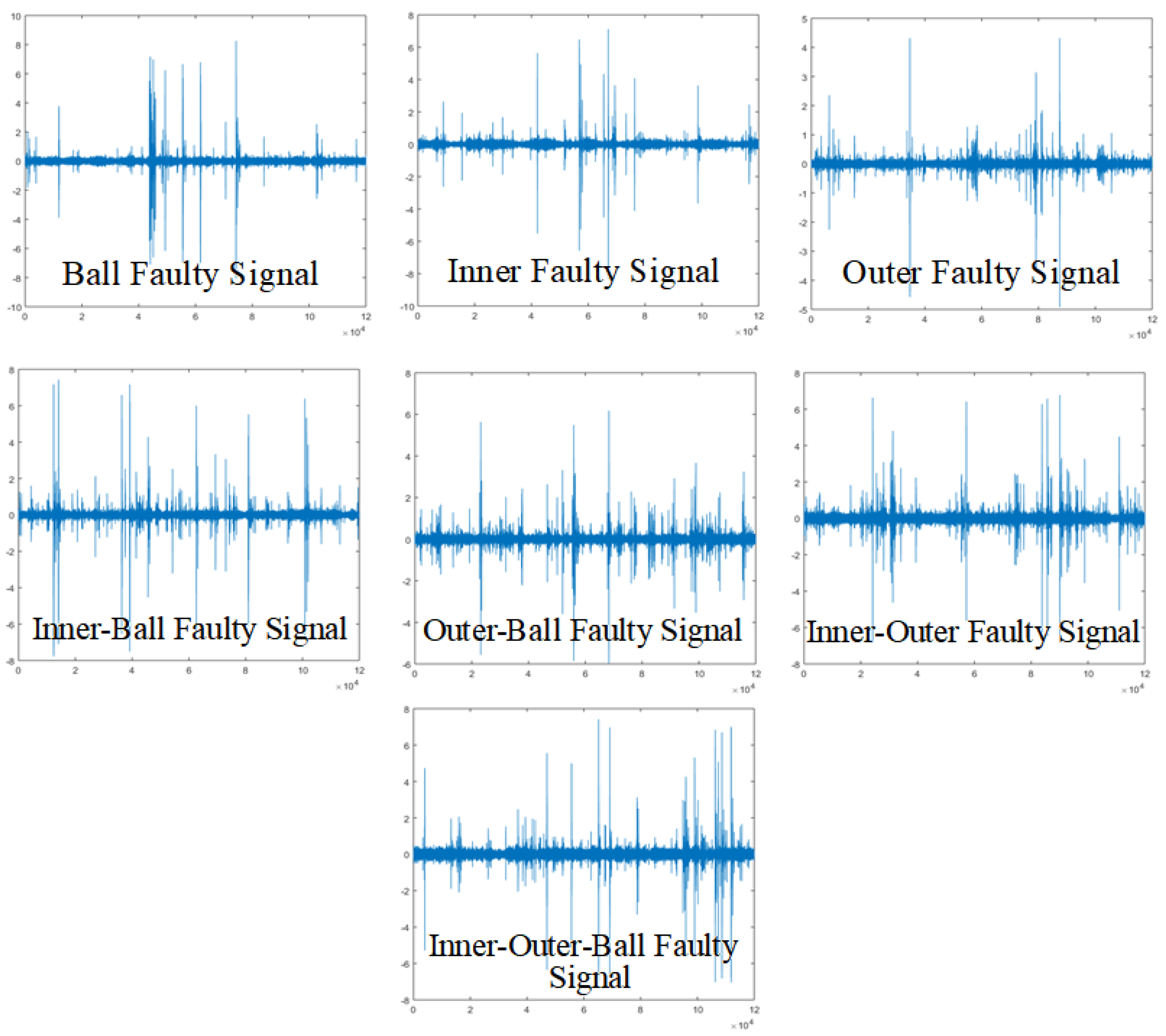
2. Dataset
3. Problem Statements and Proposed Method Objectives
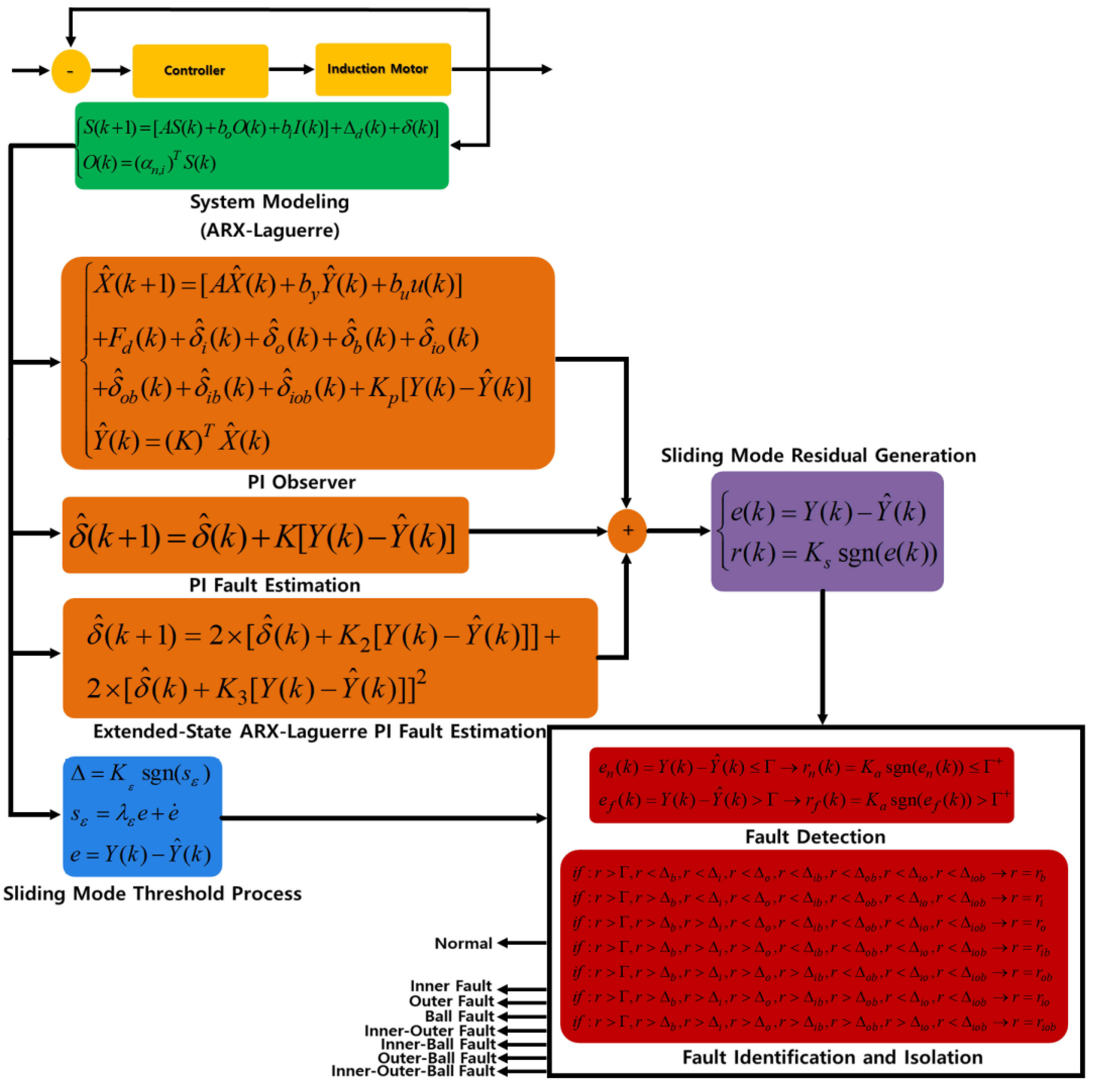
4. Proposed Fault Detection and Diagnosis
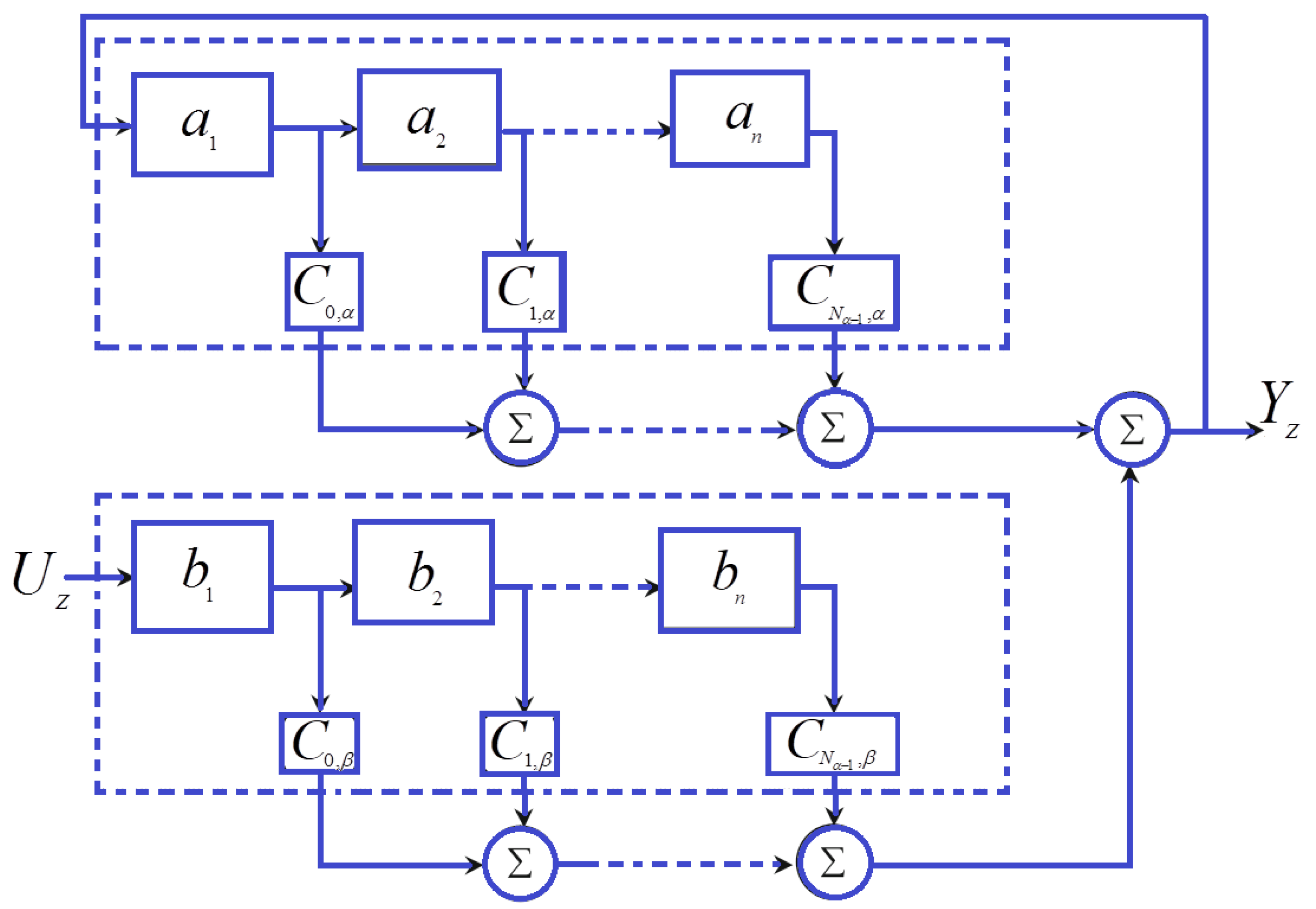
4.1. ARX-Laguerre System Modeling
4.2. Extended-State ARX-Laguerre PI Observer
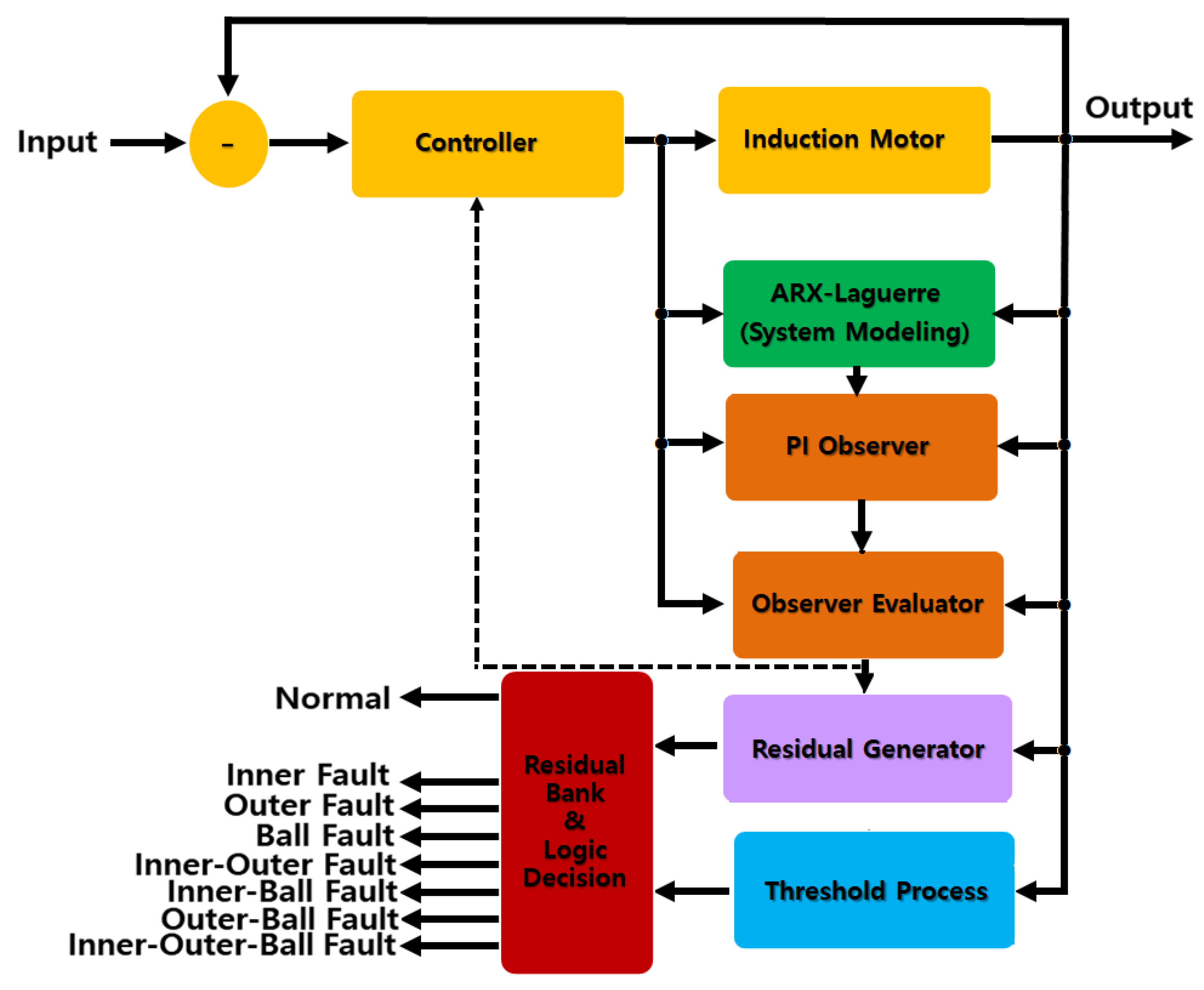
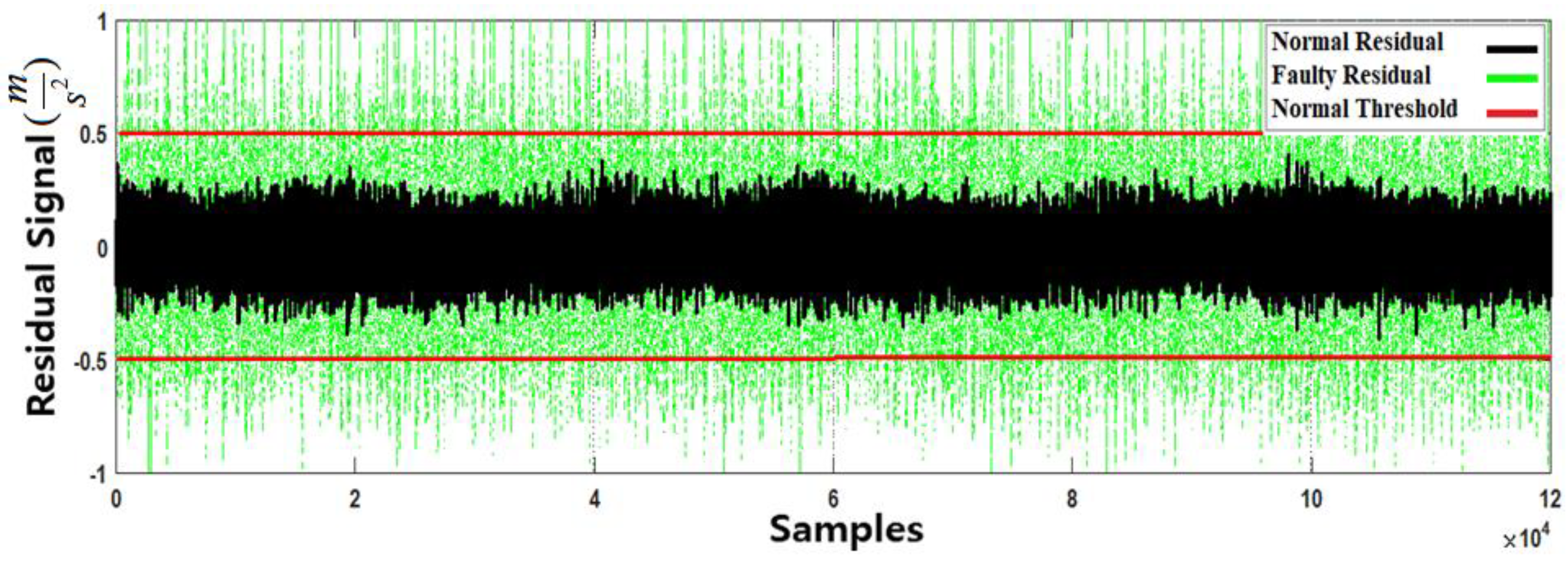
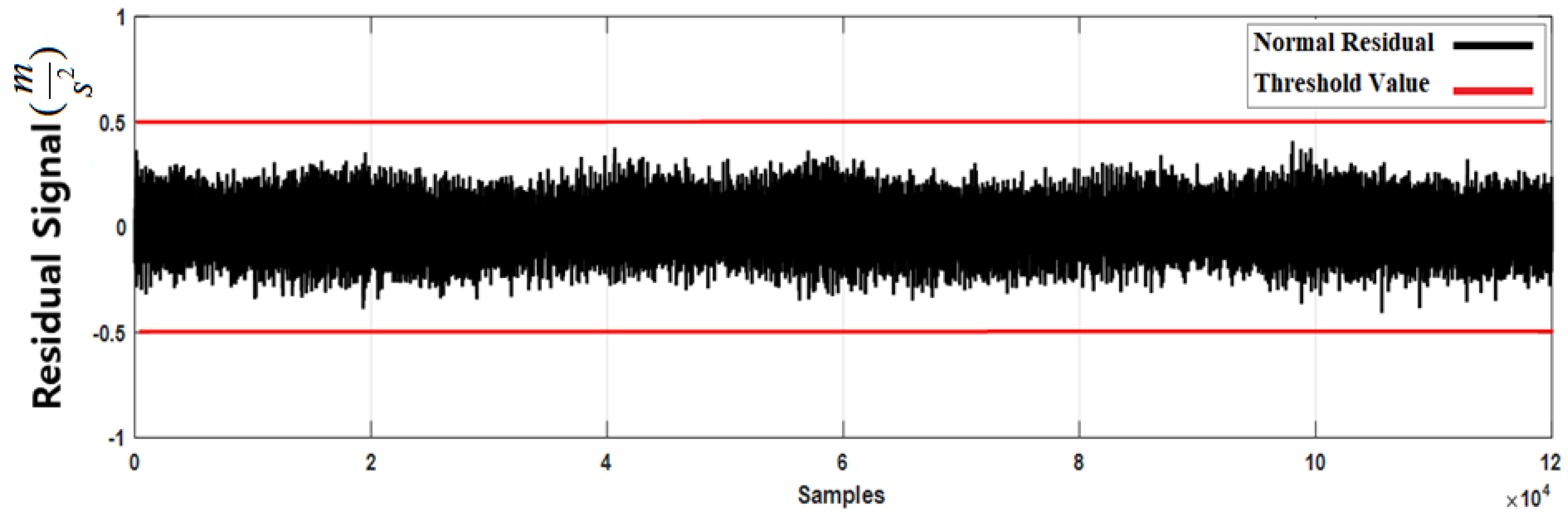
4.3. Fault Detection
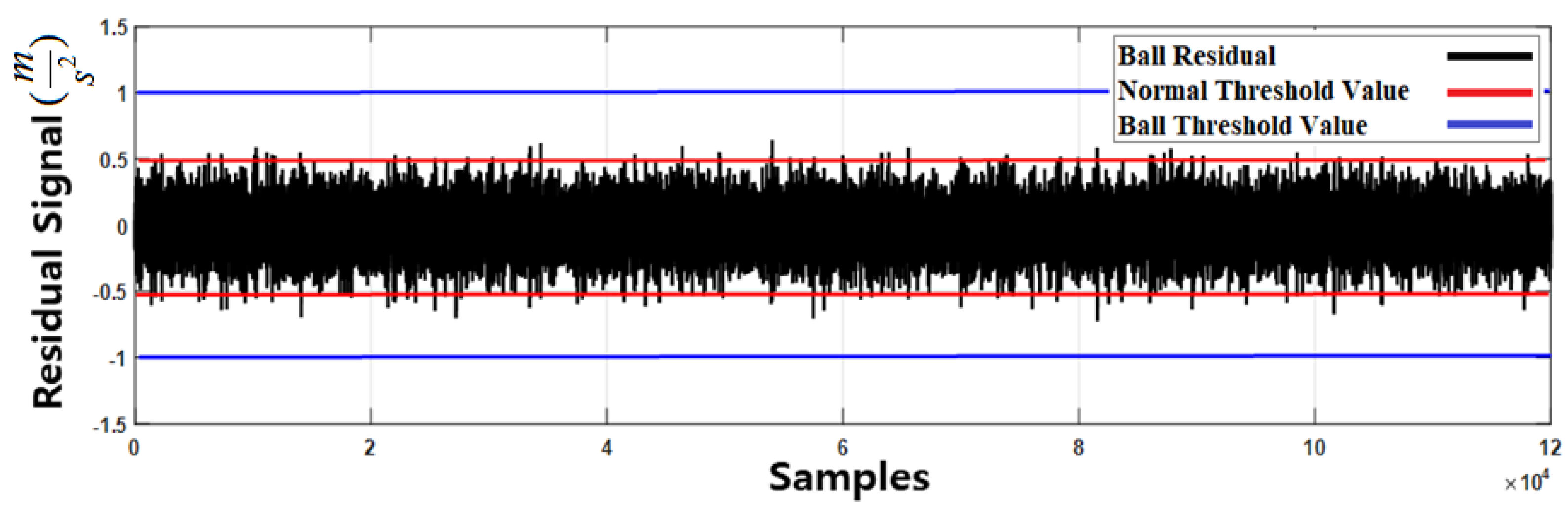
4.4. Fault Identification
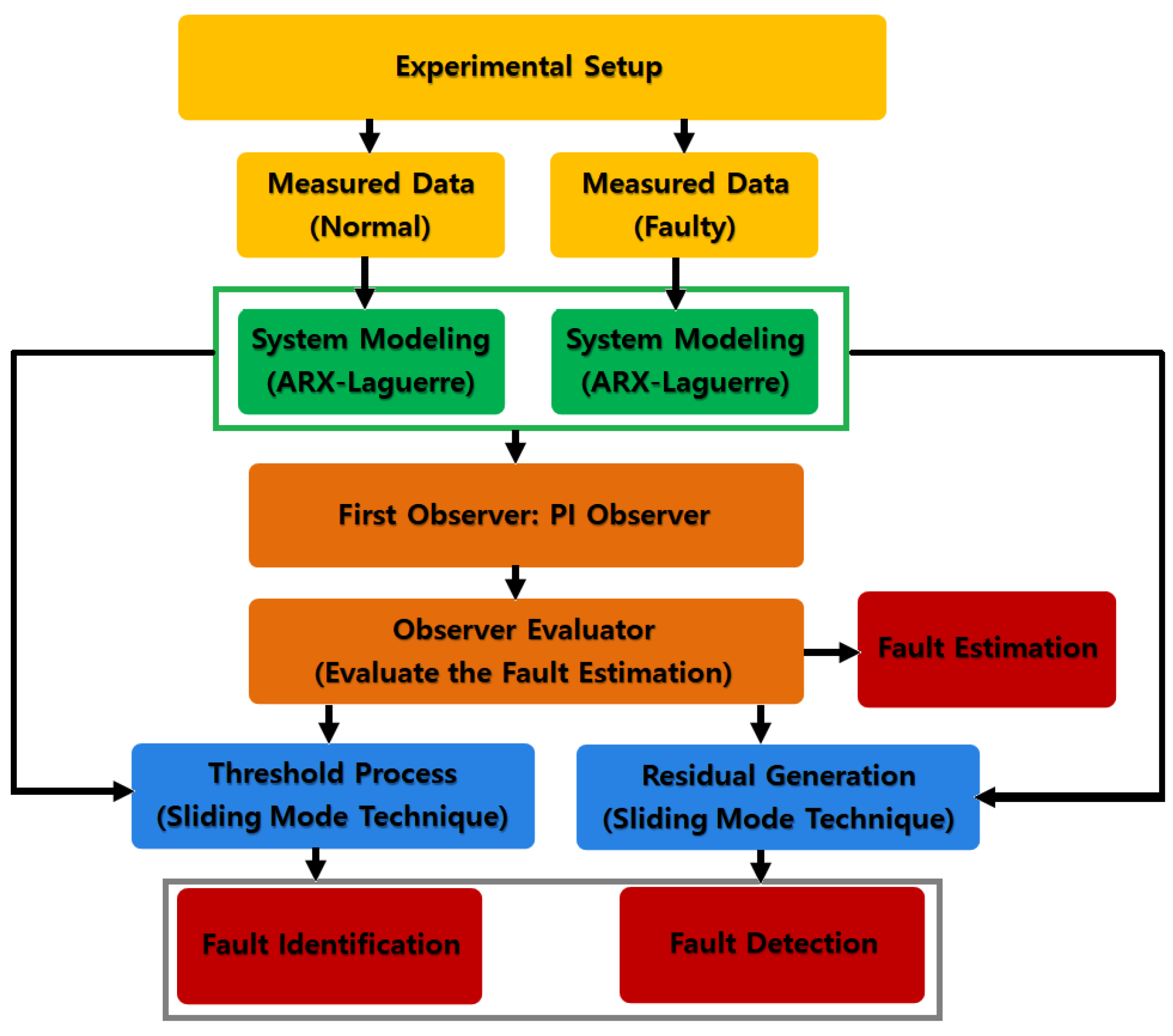
| Algorithm 1. Extended-state ARX-Laguerre PI observer for fault diagnosis of an induction motor | |
| 1: | Perform system modeling based on the ARX-Laguerre technique (4,11) |
| 2: | Run the ARX-Laguerre PI observer (17) |
| 3: | Run the observer evaluator based on the extended-state method (20) |
| 4: | Run the proposed method for fault estimation (19,20) |
| 5: | Run the residual generator based on the sliding mode technique (21) |
| 6: | Run the threshold value based on the sliding mode technique (22) |
| 7: | Run the decision logic for fault detection (23,24) |
| 8: | Run the decision logic for fault identification (32) |
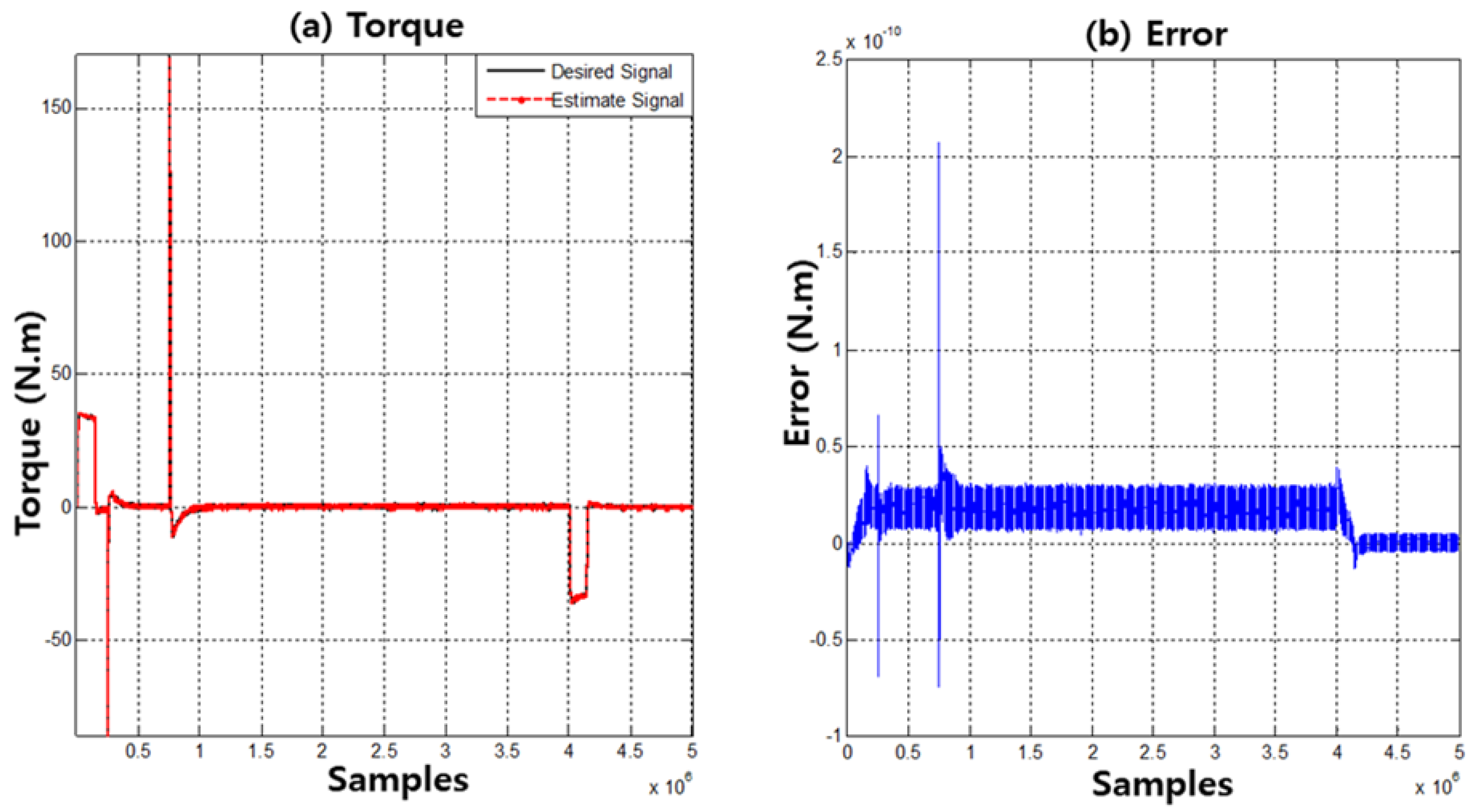
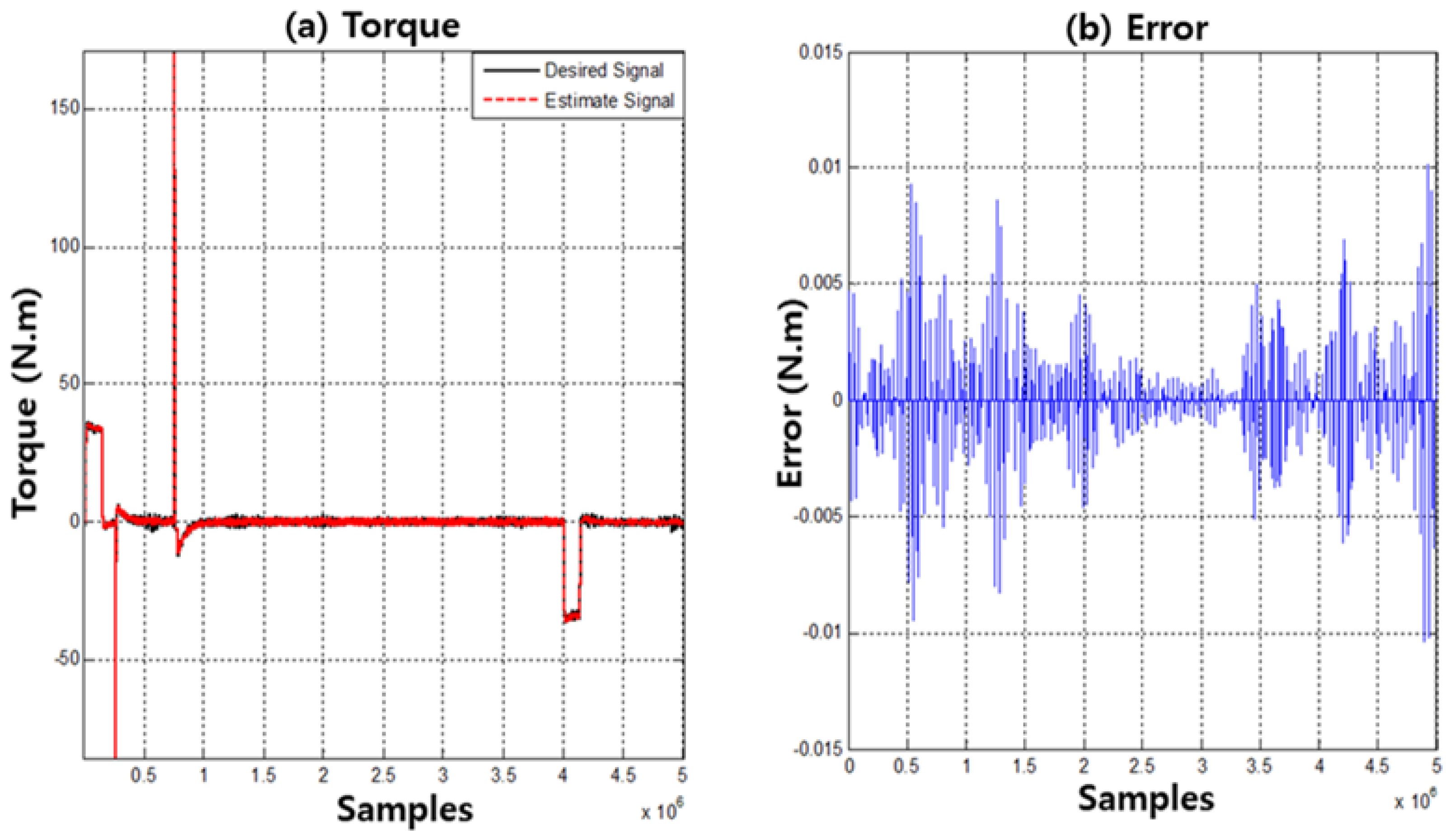
5. Results and Analysis
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Nomenclature
| Stator voltage matrix | Stator inductance matrix | ||
| Rotor voltage matrix | Rotor inductance matrix | ||
| Stator impedance matrix | Stator and rotor mutual inductance | ||
| Rotor impedance matrix | Rotor rectangular velocity | ||
| Flux and Flux derivation for stator | System’s output | ||
| Flux and Flux derivation for rotor | Fourier coefficients | ||
| Stator current | System’s order | ||
| Rotor current | Laguerre-based orthonormal | ||
| Laguerre pole | * | Convolution product | |
| Systems input | Input and Filter output signal | ||
| Filter input signal | System’s state | ||
| Uncertainty and disturbance | Faults | ||
| Coefficient matrices | Fourier coefficient | ||
| Null matrices | Estimation vector | ||
| Inner fault | Outer fault | ||
| Ball fault | Inner-ball fault | ||
| Inner-outer fault | Outer-ball fault | ||
| Inner-outer-ball fault | Coefficients | ||
| Sliding Mode Coefficients | Error | ||
| Fourier coefficient | Threshold Value | ||
| Residual signal | Normal residual signal | ||
| Faulty residual signal | Normal threshold level | ||
| Estimation of the system’s state | Estimation of the system’s output | ||
| Residual signal in various states | Threshold value in various states | ||
| Sliding surface | Sliding surface slope coefficients | ||
| Fault estimation function | Fault estimator by PIO (proportional integral observer) | ||
| Convergence time | Positive constant |
Appendix A
References
- Duan, F. Induction Motor Parameters Estimation and Faults Diagnosis Using Optimisation Algorithms. Ph.D. Thesis, School of Electrical and Electronic Engineering, University of Adelaide, Adelaide, Australia, 2015. [Google Scholar]
- Shao, H.; Jiang, H.; Zhang, H.; Liang, T. Electric locomotive bearing fault diagnosis using a novel convolutional deep belief network. IEEE Trans. Ind. Electron. 2018, 65, 2727–2736. [Google Scholar] [CrossRef]
- Glowacz, A.; Glowacz, W.; Glowacz, Z.; Kozik, J. Early fault diagnosis of bearing and stator faults of the single-phase induction motor using acoustic signals. Measurement 2018, 113, 1–9. [Google Scholar] [CrossRef]
- Kang, M.; Kim, J.; Kim, J.M.; Tan, A.C.C.; Kim, E.Y.; Choi, B.K. Reliable fault diagnosis for low-speed bearings using individually trained support vector machines with kernel discriminative feature analysis. IEEE Trans. Power Electr. 2015, 30, 2786–2797. [Google Scholar] [CrossRef]
- Zhou, S.; Qian, S.; Chang, W.; Xiao, Y.; Cheng, Y. A novel bearing multi-fault diagnosis approach based on weighted permutation entropy and an improved SVM ensemble classifier. Sensors 2018, 18, 1934. [Google Scholar] [CrossRef] [PubMed]
- Lan, J.; Patton, R.J.; Zhu, X. Fault-tolerant wind turbine pitch control using adaptive sliding mode estimation. Renew. Energy 2018, 116, 219–231. [Google Scholar] [CrossRef]
- Yang, R.; Xiong, R.; He, H.; Chen, Z. A fractional-order model-based battery external short circuit fault diagnosis approach for all-climate electric vehicles application. J. Clean. Prod. 2018, 187, 950–959. [Google Scholar] [CrossRef]
- Liu, R.; Yang, B.; Zio, E.; Chen, X. Artificial intelligence for fault diagnosis of rotating machinery: A review. Mech. Syst. Signal Process. 2018, 108, 33–47. [Google Scholar] [CrossRef]
- Gong, X.; Qiao, W. Bearing fault diagnosis for direct-drive wind turbines via current-demodulated signals. IEEE Trans. Ind. Electron. 2013, 60, 3419–3428. [Google Scholar] [CrossRef]
- Glowacz, A. Acoustic based fault diagnosis of three-phase induction motor. Appl. Acoust. 2018, 137, 82–89. [Google Scholar] [CrossRef]
- Xiang, L.; Yan, X. A self-adaptive time-frequency analysis method based on local mean decomposition and its application in defect diagnosis. J. Vib. Control 2016, 22, 1049–1061. [Google Scholar] [CrossRef]
- Wen, L.; Li, X.; Gao, L.; Zhang, Y. A new convolutional neural network-based data-driven fault diagnosis method. IEEE Trans. Ind. Electr. 2018, 65, 5990–5998. [Google Scholar] [CrossRef]
- Badihi, H.; Zhang, Y.; Hong, H. Fault-tolerant cooperative control in an offshore wind farm using model-free and model-based fault detection and diagnosis approaches. Appl. Ener. 2017, 201, 285–307. [Google Scholar] [CrossRef]
- Stavrou, D.; Eliades, D.G.; Panayiotou, C.G.; Polycarpou, M.M. Fault detection for service mobile robots using model-based method. Auton. Robot. 2018, 40, 383–394. [Google Scholar] [CrossRef]
- Yu, Y.; Zhao, Y.; Wang, B.; Huang, X.; Xu, D. Current sensor fault diagnosis and tolerant control for VSI-based induction motor drives. IEEE Trans. Power Electr. 2018, 33, 4238–4248. [Google Scholar]
- Piltan, F.; Kim, J.M. Bearing fault diagnosis by a robust higher-order super-twisting sliding mode observer. Sensors 2018, 18, 1128. [Google Scholar] [CrossRef] [PubMed]
- Hosameldin, A.; Nandi, A. Three-stage Hybrid Fault Diagnosis for Rolling Bearings with Compressively-sampled data and Subspace Learning Techniques. IEEE Trans. Ind. Electr. 2018. [CrossRef]
- Khalastchi, E.; Kalech, M.; Rokach, L. A hybrid approach for improving unsupervised fault detection for robotic systems. Expert Syst. Appl. 2017, 81, 372–383. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques—Part II: Fault diagnosis with knowledge-based and hybrid/active approaches. IEEE Trans. Ind. Electr. 2015, 62, 3768–3774. [Google Scholar] [CrossRef]
- Xianzeng, L.; Yang, Y.; Zhang, J. Resultant vibration signal model based fault diagnosis of a single stage planetary gear train with an incipient tooth crack on the sun gear. Renew. Energy 2018, 122, 65–79. [Google Scholar]
- Forrai, A. System Identification and Fault Diagnosis of an Electromagnetic Actuator. IEEE Trans. Contr. Syst. Techn. 2017, 25, 1028–1035. [Google Scholar] [CrossRef]
- Gao, Z. Discrete-time proportional and integral observer and observer-based controller for systems with both unknown input and output disturbances. Opt. Control Appl. Methods 2008, 29, 171–189. [Google Scholar] [CrossRef]
- Gao, Z.; Ding, S.; Ma, Y. Robust fault estimation approach and its application in vehicle lateral dynamic systems. Opt. Control Appl. Methods 2007, 28, 143–156. [Google Scholar] [CrossRef]
- Xiao, B.; Yin, S.; Gao, H. Reconfigurable tolerant control of uncertain mechanical systems with actuator faults: A sliding mode observer-based approach. IEEE Trans. Contr. Syst. Technol. 2018, 26, 1249–1258. [Google Scholar] [CrossRef]
- Yang, H.; Jiang, Y.; Yin, S. Fault-Tolerant Control of Time-Delay Markov Jump Systems With Stochastic Process and Output Disturbance Based on Sliding Mode Observer. IEEE Trans. Ind. Inf. 2018, 14, 5299–5307. [Google Scholar] [CrossRef]
- Appana, D.K.; Prosvirin, A.; Kim, J.M. Reliable fault diagnosis of bearings with varying rotational speeds using envelope spectrum and convolution neural networks. Soft Comput. 2018, 22, 6719–6729. [Google Scholar] [CrossRef]
- Diao, L.; Tang, J.; Loh, P.C.; Yin, S.; Wang, L.; Liu, Z. An efficient DSP–FPGA-based implementation of hybrid PWM for electric rail traction induction motor control. IEEE Trans. Power Electr. 2018, 33, 3276–3288. [Google Scholar]
- Bouzrara, K.; Garna, T.; Ragot, J.; Messaoud, H. Decomposition of an ARX model on Laguerre orthonormal bases. ISA Trans. 2012, 51, 848–860. [Google Scholar] [CrossRef] [PubMed]
- Tayebi-Haghighi, S.; Piltan, F.; Kim, J.M. Robust Composite High-Order Super-Twisting Sliding Mode Control of Robot Manipulators. Robotics 2018, 7, 13. [Google Scholar] [CrossRef]
- Piltan, F.; Kim, J.M. Bearing Fault Diagnosis Using an Extended Variable Structure Feedback Linearization Observer. Sensors 2018, 18, 4359. [Google Scholar] [CrossRef] [PubMed]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Fault Types | Rotational Speed (RPM) | Fault Crack Size (mm) |
|---|---|---|---|
| Dataset 1 | Normal States | 300 | 3 and 6 |
| IR Fault | 300 | ||
| OR Fault | 300 | ||
| Ball Fault | 300 | ||
| Inner-Outer Fault | 300 | ||
| Inner-Ball Fault | 300 | ||
| Outer-Ball Fault | 300 | ||
| Inner-Outer-Ball Fault | 300 | ||
| Dataset 2 | Normal States | 400 | 3 and 6 |
| IR Fault | 400 | ||
| OR Fault | 400 | ||
| Ball Fault | 400 | ||
| Inner-Outer Fault | 400 | ||
| Inner-Ball Fault | 400 | ||
| Outer-Ball Fault | 400 | ||
| Inner-Outer-Ball Fault | 400 | ||
| Dataset 3 | Normal States | 450 | 3 and 6 |
| IR Fault | 450 | ||
| OR Fault | 450 | ||
| Ball Fault | 450 | ||
| Inner-Outer Fault | 450 | ||
| Inner-Ball Fault | 450 | ||
| Outer-Ball Fault | 450 | ||
| Inner-Outer-Ball Fault | 450 | ||
| Dataset 4 | Normal States | 500 | 3 and 6 |
| IR Fault | 500 | ||
| OR Fault | 500 | ||
| Ball Fault | 500 | ||
| Inner-Outer Fault | 500 | ||
| Inner-Ball Fault | 500 | ||
| Outer-Ball Fault | 500 | ||
| Inner-Outer-Ball Fault | 500 |
| Algorithms | Proposed Method | ALPIO | ||
|---|---|---|---|---|
| Crack Diameters (mm) | 3 | 6 | 3 | 6 |
| Normal Stat | 100% | 100% | 80% | 80% |
| IR Fault | 95% | 96% | 67% | 73% |
| OR Fault | 95% | 97% | 72% | 80% |
| Ball Fault | 96% | 100% | 78% | 74% |
| IR-Ball Fault | 93% | 98% | 80% | 81% |
| OR-Ball Fault | 97% | 97% | 82% | 82% |
| IR-OR Fault | 98% | 98% | 78% | 82% |
| IR-OR-Ball Fault | 97% | 97% | 78% | 81% |
| Average | 96.1% | 97.9% | 77.6% | 79.4% |
| Algorithms | Proposed Method | ALPIO | ||
|---|---|---|---|---|
| Crack Diameters (mm) | 3 | 6 | 3 | 6 |
| Normal Stat | 100% | 100% | 86% | 86% |
| IR Fault | 95% | 96% | 70% | 73% |
| OR Fault | 96% | 97% | 72% | 82% |
| Ball Fault | 97% | 99% | 78% | 79% |
| IR-Ball Fault | 94% | 98% | 80% | 84% |
| OR-Ball Fault | 97% | 97% | 83% | 83% |
| IR-OR Fault | 98% | 100% | 78% | 82% |
| IR-OR-Ball Fault | 97% | 98% | 79% | 80% |
| Average | 96.8% | 98.2% | 78.3% | 81.1% |
| Algorithms | Proposed Method | ALPIO | ||
|---|---|---|---|---|
| Crack Diameters (mm) | 3 | 6 | 3 | 6 |
| Normal Stat | 100% | 100% | 88% | 88% |
| IR Fault | 97% | 97% | 75% | 78% |
| OR Fault | 97% | 98% | 76% | 82% |
| Ball Fault | 97% | 99% | 82% | 82% |
| IR-Ball Fault | 95% | 98% | 83% | 84% |
| OR-Ball Fault | 97% | 98% | 84% | 84% |
| IR-OR Fault | 98% | 99% | 80% | 82% |
| IR-OR-Ball Fault | 97% | 97% | 79% | 81% |
| Average | 97.3% | 98.8% | 79.6% | 82.4% |
| Algorithms | Proposed Method | ALPIO | ||
|---|---|---|---|---|
| Crack Diameters (mm) | 3 | 6 | 3 | 6 |
| Normal Stat | 100% | 100% | 90% | 90% |
| IR Fault | 97% | 97% | 81% | 83% |
| OR Fault | 98% | 98% | 78% | 82% |
| Ball Fault | 97% | 99% | 82% | 84% |
| IR-Ball Fault | 97% | 97% | 83% | 85% |
| OR-Ball Fault | 98% | 99% | 85% | 85% |
| IR-OR Fault | 98% | 99% | 82% | 82% |
| IR-OR-Ball Fault | 97% | 98% | 82% | 83% |
| Average | 99.9% | 99.1% | 81.2% | 84.6% |
| Actual Class | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Predict Class | Normal | Ball | IR | OR | IR-Ball | OR-Ball | IR-OR | IR-OR-Ball | Precision |
| Normal | 100% | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 100% 0% |
| Ball | 1% | 97% | 0 | 0 | 1% | 1% | 0 | 0 | 97% 3% |
| IR | 0 | 1% | 95% | 2% | 1% | 0 | 1% | 0 | 95% 5% |
| OR | 0 | 0 | 1% | 96% | 3% | 0 | 0 | 0 | 96% 4% |
| IR-Ball | 0 | 0 | 0 | 4% | 94% | 1% | 1% | 0 | 94% 6% |
| OR-Ball | 1% | 1% | 0 | 1% | 0 | 97% | 0 | 0 | 97% 3% |
| IR-OR | 1% | 0 | 0 | 0 | 1% | 0 | 98% | 0 | 98% 2% |
| IR-OR-Ball | 0 | 0 | 0 | 0 | 0 | 0 | 3% | 97% | 97% 3% |
| Recall | 97.1% 2.9% | 97.9% 2.1% | 99% 1% | 93.2% 6.8% | 94% 6% | 97.9% 2.1% | 95.1% 4.9% | 100% 0% | 95.07% 4.93% |
| Actual Class | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Predict Class | Normal | Ball | IR | OR | IR-Ball | OR-Ball | IR-OR | IR-OR-Ball | Precision |
| Normal | 100% | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 100% 0% |
| Ball | 0 | 99% | 0 | 1% | 0 | 0 | 0 | 0 | 99% 1% |
| IR | 0 | 0 | 96% | 3% | 0 | 0 | 1% | 0 | 96% 4% |
| OR | 0 | 0 | 2% | 97% | 1% | 0 | 0 | 0 | 97% 3% |
| IR-Ball | 0 | 2% | 0 | 0 | 98% | 0 | 0 | 0 | 98% 2% |
| OR-Ball | 1% | 2% | 0 | 0 | 0 | 97% | 0 | 0 | 97% 3% |
| IR-OR | 0 | 0 | 0 | 0 | 0 | 0 | 100% | 0 | 100% 0% |
| IR-OR-Ball | 0 | 0 | 1% | 0 | 0 | 0 | 1% | 98% | 98% 2% |
| Recall | 99% 1% | 96.1% 3.9% | 97% 3% | 96% 4% | 99% 1% | 100% 0% | 98% 2% | 100% 0% | 98.13% 1.87% |
| Algorithms | Proposed Method | ALPIO | ||||||
|---|---|---|---|---|---|---|---|---|
| Motor Speed (RPM) | 300 | 400 | 450 | 500 | 300 | 400 | 450 | 500 |
| Normal Stat | 100% | 100% | 100% | 100% | 80% | 86% | 88% | 90% |
| IR Fault | 95% | 95% | 97% | 97% | 67% | 70% | 75% | 83% |
| OR Fault | 95% | 96% | 97% | 98% | 72% | 72% | 76% | 82% |
| Ball Fault | 96% | 97% | 97% | 97% | 77% | 78% | 82% | 84% |
| IR-Ball Fault | 93% | 94% | 95% | 97% | 80% | 80% | 83% | 85% |
| OR-Ball Fault | 97% | 97% | 97% | 98% | 79% | 83% | 84% | 80% |
| IR-OR Fault | 98% | 98% | 98% | 98% | 78% | 82% | 72% | 82% |
| IR-OR-Ball Fault | 97% | 97% | 97% | 98% | 79% | 76% | 79% | 83% |
| Average | 96.4% | 96.8% | 97.2% | 97.9% | 76.5% | 78.4% | 79.9% | 83.6% |
| Algorithms | Proposed Method | ALPIO | ||||||
|---|---|---|---|---|---|---|---|---|
| Motor Speed (RPM) | 300 | 400 | 450 | 500 | 300 | 400 | 450 | 500 |
| Normal Stat | 100% | 100% | 100% | 100% | 80% | 86% | 88% | 90% |
| IR Fault | 96% | 96% | 97% | 97% | 73% | 73% | 78% | 83% |
| OR Fault | 97% | 97% | 98% | 98% | 80% | 76% | 82% | 82% |
| Ball Fault | 100% | 99% | 99% | 99% | 74% | 78% | 82% | 84% |
| IR-Ball Fault | 98% | 98% | 98% | 97% | 81% | 84% | 84% | 85% |
| OR-Ball Fault | 97% | 97% | 98% | 99% | 82% | 83% | 84% | 85% |
| IR-OR Fault | 98% | 100% | 99% | 99% | 82% | 82% | 79% | 82% |
| IR-OR-Ball Fault | 97% | 98% | 97% | 98% | 78% | 80% | 82% | 83% |
| Average | 97.9% | 98.1% | 98.2% | 98.4% | 78.8% | 80.2% | 82.4% | 84.3% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Piltan, F.; Kim, J.-M. Nonlinear Extended-state ARX-Laguerre PI Observer Fault Diagnosis of Bearings. Appl. Sci. 2019, 9, 888. https://doi.org/10.3390/app9050888
Piltan F, Kim J-M. Nonlinear Extended-state ARX-Laguerre PI Observer Fault Diagnosis of Bearings. Applied Sciences. 2019; 9(5):888. https://doi.org/10.3390/app9050888
Chicago/Turabian StylePiltan, Farzin, and Jong-Myon Kim. 2019. "Nonlinear Extended-state ARX-Laguerre PI Observer Fault Diagnosis of Bearings" Applied Sciences 9, no. 5: 888. https://doi.org/10.3390/app9050888
APA StylePiltan, F., & Kim, J.-M. (2019). Nonlinear Extended-state ARX-Laguerre PI Observer Fault Diagnosis of Bearings. Applied Sciences, 9(5), 888. https://doi.org/10.3390/app9050888