Sparse Envelope Spectra for Feature Extraction of Bearing Faults Based on NMF

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Featured Application
Abstract
1. Introduction
2. Materials and Methods
2.1. NMF
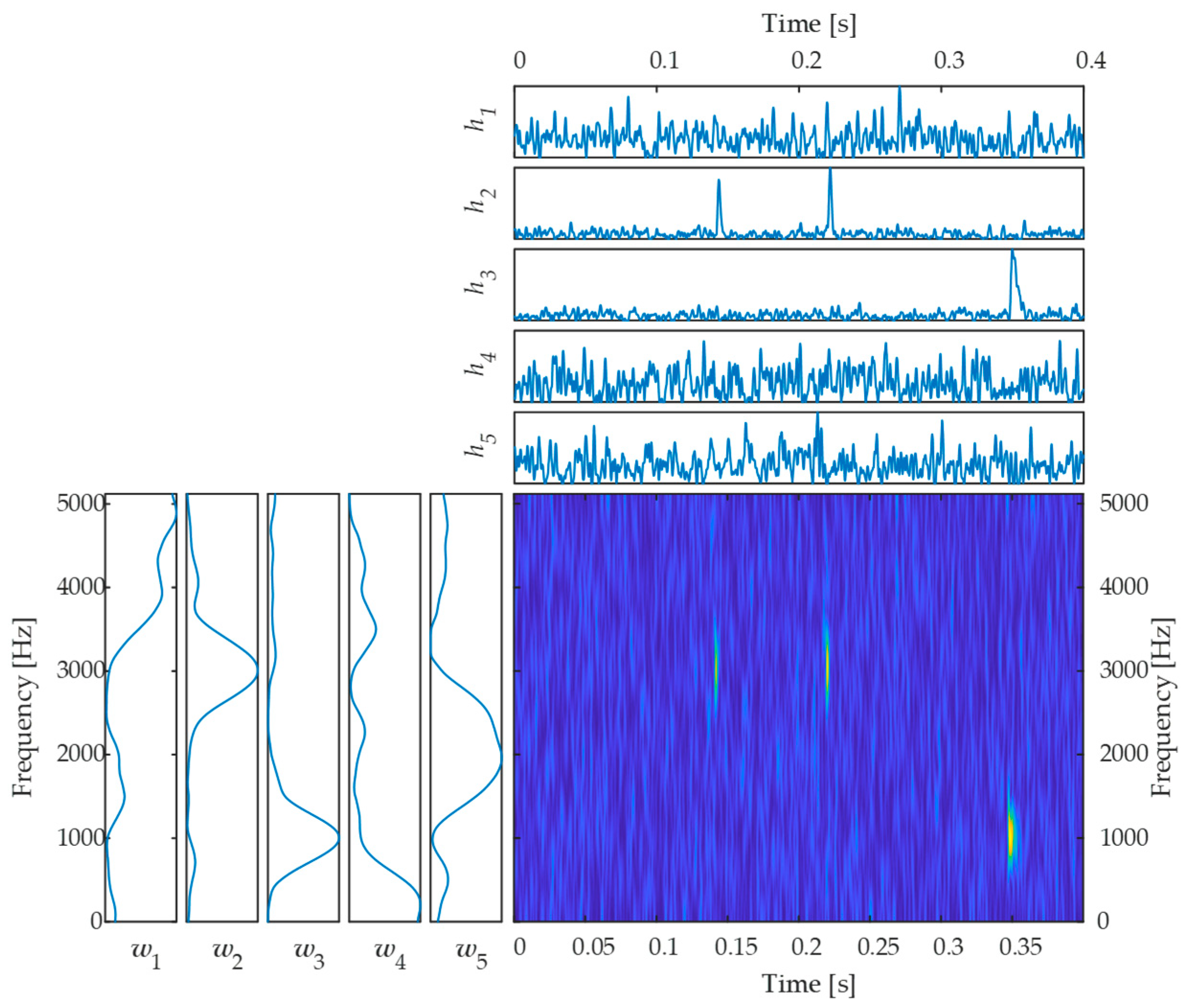
2.2. Time Frequency Separation of Time–Frequency Matrix
2.3. Feature Extraction Based on Sparse Envelope Spectrum
3. Results
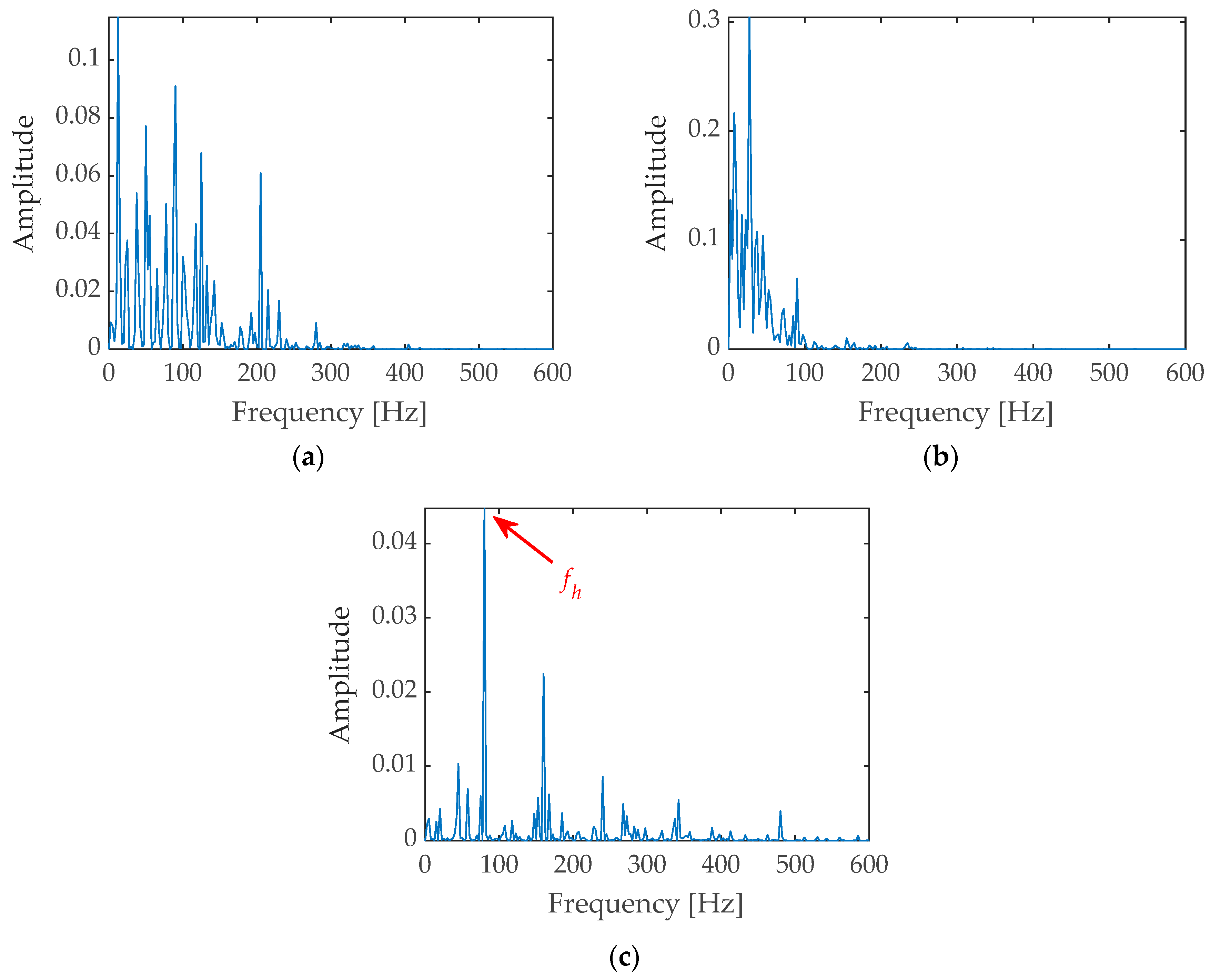
3.1. Numerical Experiment
3.2. Experimental Verification
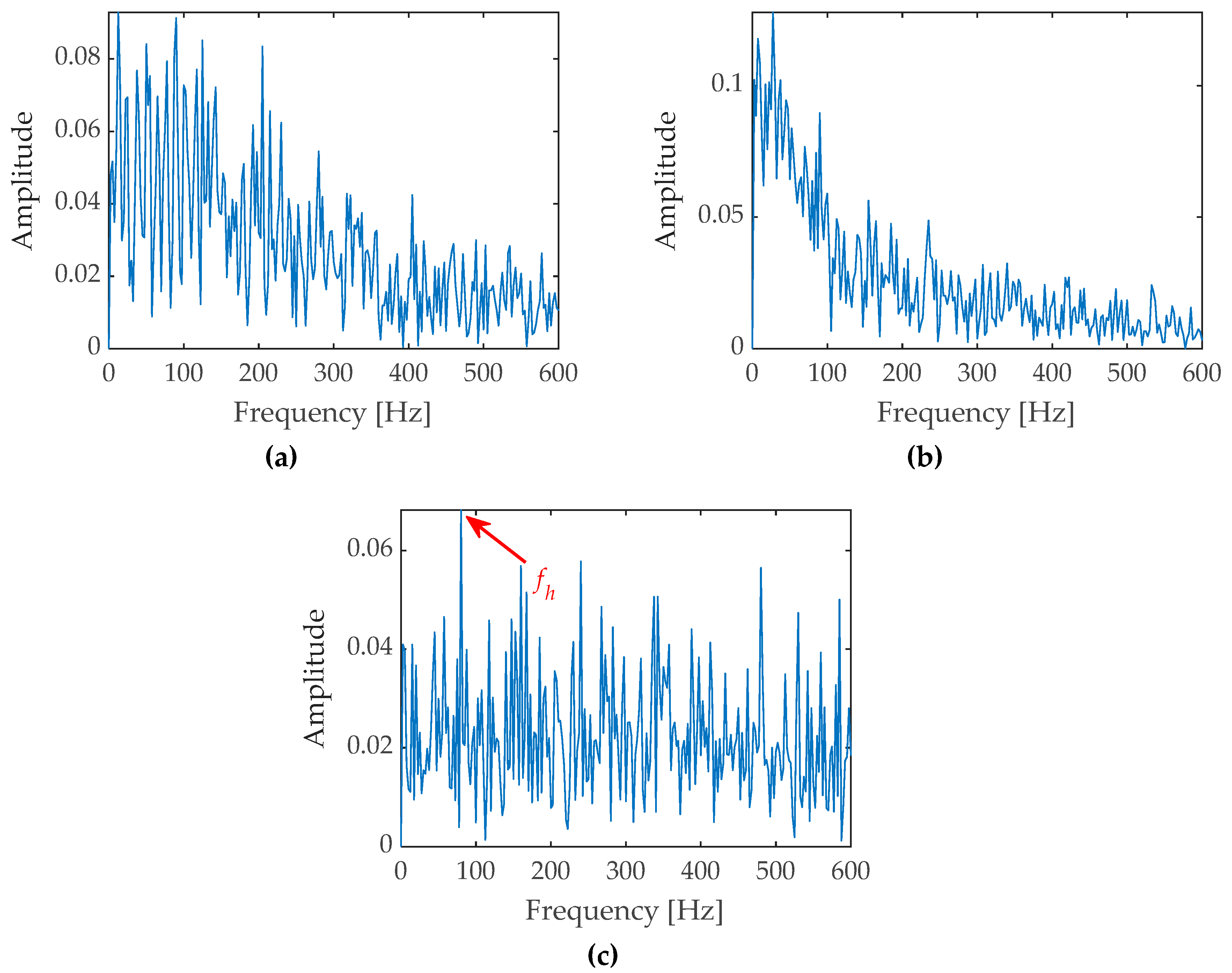
3.2.1. Case 1
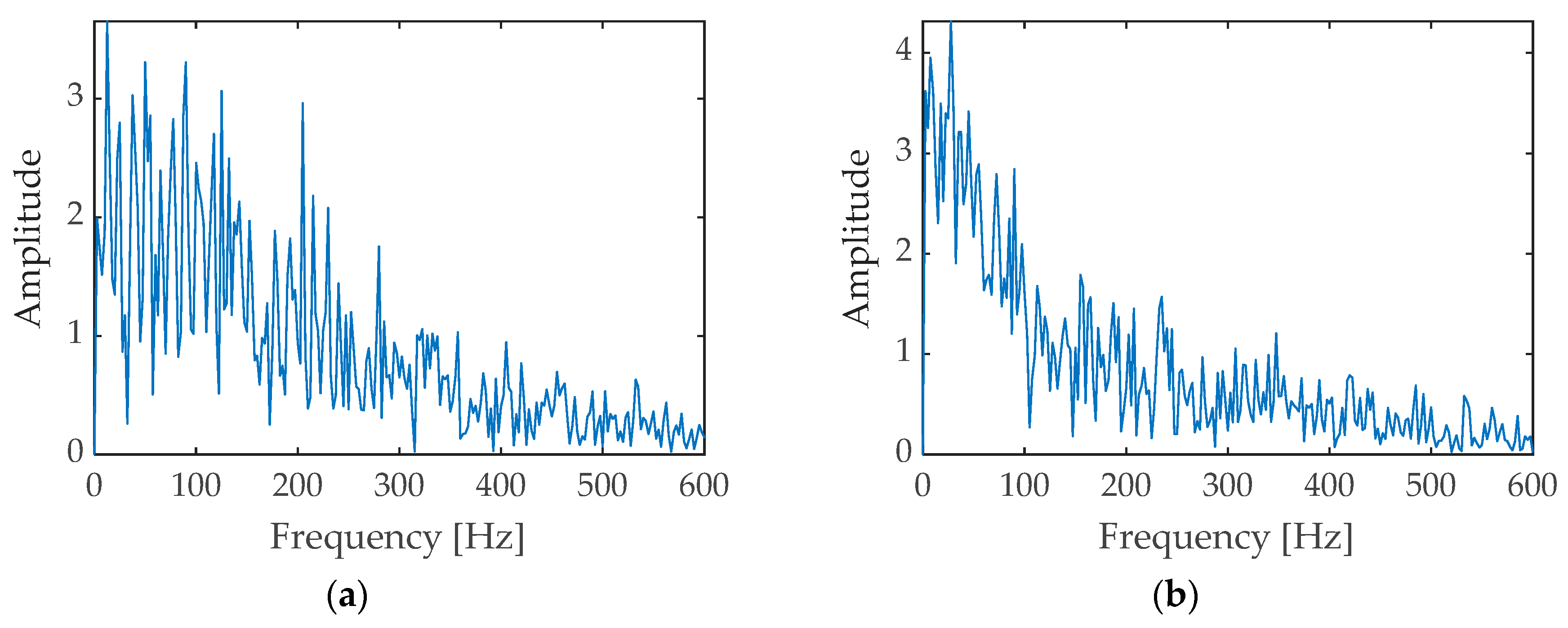
3.2.2. Case 2
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ericsson, S.; Grip, N.; Johansson, E.; Persson, L.E.; Sjoberg, R.; Stromberg, J.O. Towards automatic detection of local bearing defects in rotating machines. Mech. Syst. Signal Process. 2005, 19, 509–535. [Google Scholar] [CrossRef] [Green Version]
- Tandon, N.; Nakra, B. Detection of defects in rolling element bearings by vibration monitoring. Indian J. Mech. Eng. Div. 1993, 73, 271–282. [Google Scholar]
- Reif, Z.; Lai, M. Detection of Developing Bearing Failures by Means of Vibration; The American Society of Mechanical Engineers: New York, NY, USA, 1989; pp. 231–236. [Google Scholar]
- Nikolaou, N.G.; Antoniadis, I.A. Rolling element bearing fault diagnosis using wavelet packets. NDT & E Int. 2002, 35, 197–205. [Google Scholar]
- Qiu, H.; Lee, J.; Lin, J.; Yu, G. Wavelet filter-based weak signature detection method and its application on rolling element bearing prognostics. J. Sound Vib. 2006, 289, 1066–1090. [Google Scholar] [CrossRef]
- Park, C.S.; Choi, Y.C.; Kim, Y.H. Early fault detection in automotive ball bearings using the minimum variance cepstrum. Mech. Syst. Signal Process. 2013, 38, 534–548. [Google Scholar] [CrossRef]
- McFadden, P.; Smith, J. Vibration monitoring of rolling element bearings by the high-frequency resonance technique—A review. Tribol. Int. 1984, 17, 3–10. [Google Scholar] [CrossRef]
- Antoni, J. The spectral kurtosis: A useful tool for characterising non-stationary signals. Mech. Syst. Signal Process. 2006, 20, 282–307. [Google Scholar] [CrossRef]
- Antoni, J.; Randall, R.B. The spectral kurtosis: Application to the vibratory surveillance and diagnostics of rotating machines. Mech. Syst. Signal Process. 2006, 20, 308–331. [Google Scholar] [CrossRef]
- Barszcz, T.; Jablonski, A. A novel method for the optimal band selection for vibration signal demodulation and comparison with the kurtogram. Mech. Syst. Signal Process. 2011, 25, 431–451. [Google Scholar] [CrossRef]
- Yu, K.P.; Yang, K.; Bai, Y.H. Estimation of modal parameters using the sparse component analysis based underdetermined blind source separation. Mech. Syst. Signal Process. 2014, 45, 302–316. [Google Scholar] [CrossRef]
- Zhang, Z.Y.; Hua, H.X.; Xu, X.Z.; Huang, Z. Modal parameter identification through gabor expansion of response signals. J. Sound Vib. 2003, 266, 943–955. [Google Scholar] [CrossRef]
- Li, Z.; Crocker, M.J. A study of joint time-frequency analysis-based modal analysis. IEEE Trans. Instrum. Meas. 2006, 55, 2335–2342. [Google Scholar] [CrossRef]
- Le, T.-P.; Paultre, P. Modal identification based on the time–frequency domain decomposition of unknown-input dynamic tests. Int. J. Mech. Sci. 2013, 71, 41–50. [Google Scholar] [CrossRef]
- Su, W.S.; Wang, F.T.; Zhu, H.; Zhang, Z.X.; Guo, Z.G. Rolling element bearing faults diagnosis based on optimal morlet wavelet filter and autocorrelation enhancement. Mech. Syst. Signal Process. 2010, 24, 1458–1472. [Google Scholar] [CrossRef]
- Yiakopoulos, C.T.; Antoniadis, I.A. Wavelet based demodulation of vibration signals generated by defects in rolling element bearings. Shock Vib. 2002, 9, 293–306. [Google Scholar] [CrossRef]
- Wodecki, J.; Kruczek, P.; Wyłomańska, A.; Bartkowiak, A.; Zimroz, R. Novel method of informative frequency band selection for vibration signal using nonnegative matrix factorization of short-time fourier transform. In Proceedings of the 2017 IEEE 11th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Tinos, Greece, 29 August–1 September 2017; pp. 129–133. [Google Scholar]
- Wodecki, J.; Zdunek, R.; Wyłomańska, A.; Zimroz, R. Local fault detection of rolling element bearing components by spectrogram clustering with semi-binary NMF. Diagnostyka 2017, 18, 3–8. [Google Scholar]
- Cui, D.; Zhang, Q.; Xiao, M.; Wang, L. Feature spectrum extraction algorithm for rolling bearings based on spectrogram and constrained nmf. Bearing 2014, 5, 48–52. [Google Scholar] [CrossRef]
- Grais, E.M.; Erdogan, H. Single channel speech music separation using nonnegative matrix factorization and spectral masks. In Proceedings of the 2011 17th International Conference on Digital Signal Processing (DSP), Corfu, Greece, 6–8 July 2011; pp. 1–6. [Google Scholar]
- King, B.; Févotte, C.; Smaragdis, P. Optimal cost function and magnitude power for nmf-based speech separation and music interpolation. In Proceedings of the 2012 IEEE International Workshop on Machine Learning for Signal Processing (MLSP), Santander, Spain, 23–26 September 2012; pp. 1–6. [Google Scholar]
- Sun, M.; Li, Y.; Gemmeke, J.F.; Zhang, X. Speech enhancement under low snr conditions via noise estimation using sparse and low-rank nmf with kullback–leibler divergence. IEEE Trans. Audio Speech Lang. Process. 2015, 23, 1233–1242. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhu, Z.; Zhao, Y.; Wei, Y.; Wei, S.; Li, X. Topographic nmf for data representation. IEEE Trans. Cybern. 2014, 44, 1762–1771. [Google Scholar] [CrossRef]
- Raj, B.; Singh, R.; Virtanen, T. Phoneme-dependent nmf for speech enhancement in monaural mixtures. In Proceedings of the Twelfth Annual Conference of the International Speech Communication Association, Florence, Italy, 27–31 August 2011. [Google Scholar]
- Kalayeh, M.M.; Idrees, H.; Shah, M. Nmf-knn: Image annotation using weighted multi-view non-negative matrix factorization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 184–191. [Google Scholar]
- Kim, J.; Park, H. Fast nonnegative matrix factorization: An active-set-like method and comparisons. SIAM J. Sci. Comput. 2011, 33, 3261–3281. [Google Scholar] [CrossRef]
- Ding, C.; He, X.; Simon, H.; Jin, R. On the equivalence of nonnegative matrix factorization and k-means-spectral clustering. In Proceedings of the 2005 SIAM International Conference on Data Mining; SIAM: Philadelphia, PA, USA, 2005. [Google Scholar]
- Lin, C.J. Projected Gradient Methods for Nonnegative Matrix Factorization; MIT Press: Cambridge, MA, USA, 2007; pp. 2756–2779. [Google Scholar]
- Grippo, L.; Sciandrone, M. On the convergence of the block nonlinear gauss–seidel method under convex constraints. Oper. Res. Lett. 2000, 26, 127–136. [Google Scholar] [CrossRef]
- Berry, M.W.; Browne, M.; Langville, A.N.; Pauca, V.P.; Plemmons, R.J. Algorithms and applications for approximate nonnegative matrix factorization. Comput. Stat. Data Anal. 2007, 52, 155–173. [Google Scholar] [CrossRef] [Green Version]
- Kim, D.; Sra, S.; Dhillon, I.S. Fast newton-type methods for the least squares nonnegative matrix approximation problem. In Proceedings of the 2007 SIAM International Conference on Data Mining; SIAM: Philadelphia, PA, USA, 2007; pp. 343–354. [Google Scholar]
- Kim, J.; Park, H. Toward faster nonnegative matrix factorization: A new algorithm and comparisons. In Proceedings of the Eighth IEEE International Conference on Data Mining, ICDM ‘08, Pisa, Italy, 15–19 December 2008; pp. 353–362. [Google Scholar]
- Van Benthem, M.H.; Keenan, M.R. Fast algorithm for the solution of large-scale non-negativity-constrained least squares problems. J. Chemom. A J. Chemom. Soc. 2004, 18, 441–450. [Google Scholar] [CrossRef]
- Cichocki, A.; Zdunek, R.; Phan, A.H.; Amari, S.-I. Nonnegative Matrix and Tensor Factorizations: Applications to Exploratory Multi-Way Data Analysis and Blind Source Separation; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Miao, Y.H.; Zhao, M.; Lin, J.; Lei, Y.G. Application of an improved maximum correlated kurtosis deconvolution method for fault diagnosis of rolling element bearings. Mech. Syst. Signal Process. 2017, 92, 173–195. [Google Scholar] [CrossRef]
- Chen, X.F.; Du, Z.H.; Li, J.M.; Li, X.; Zhang, H. Compressed sensing based on dictionary learning for extracting impulse components. Signal Process. 2014, 96, 94–109. [Google Scholar] [CrossRef]
- Case Western Reserve University. Bearing Data Center Website. Available online: https://csegroups.case.edu/bearingdatacenter/pages/welcome-case-western-reserve-university-bearing-data-center-website (accessed on 15 January 2019).
- Smith, W.A.; Randall, R.B. Rolling element bearing diagnostics using the case western reserve university data: A benchmark study. Mech. Syst. Signal Process. 2015, 64–65, 100–131. [Google Scholar] [CrossRef]

























© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, L.; Shan, L.; Liu, F.; Niu, B.; Xu, G. Sparse Envelope Spectra for Feature Extraction of Bearing Faults Based on NMF. Appl. Sci. 2019, 9, 755. https://doi.org/10.3390/app9040755
Liang L, Shan L, Liu F, Niu B, Xu G. Sparse Envelope Spectra for Feature Extraction of Bearing Faults Based on NMF. Applied Sciences. 2019; 9(4):755. https://doi.org/10.3390/app9040755
Chicago/Turabian StyleLiang, Lin, Lei Shan, Fei Liu, Ben Niu, and Guanghua Xu. 2019. "Sparse Envelope Spectra for Feature Extraction of Bearing Faults Based on NMF" Applied Sciences 9, no. 4: 755. https://doi.org/10.3390/app9040755
APA StyleLiang, L., Shan, L., Liu, F., Niu, B., & Xu, G. (2019). Sparse Envelope Spectra for Feature Extraction of Bearing Faults Based on NMF. Applied Sciences, 9(4), 755. https://doi.org/10.3390/app9040755