Experimental Validation of Aero-Hydro-Servo-Elastic Models of a Scaled Floating Offshore Wind Turbine



Abstract
:1. Introduction
2. Aero-Hydro-Servo-Elastic Model
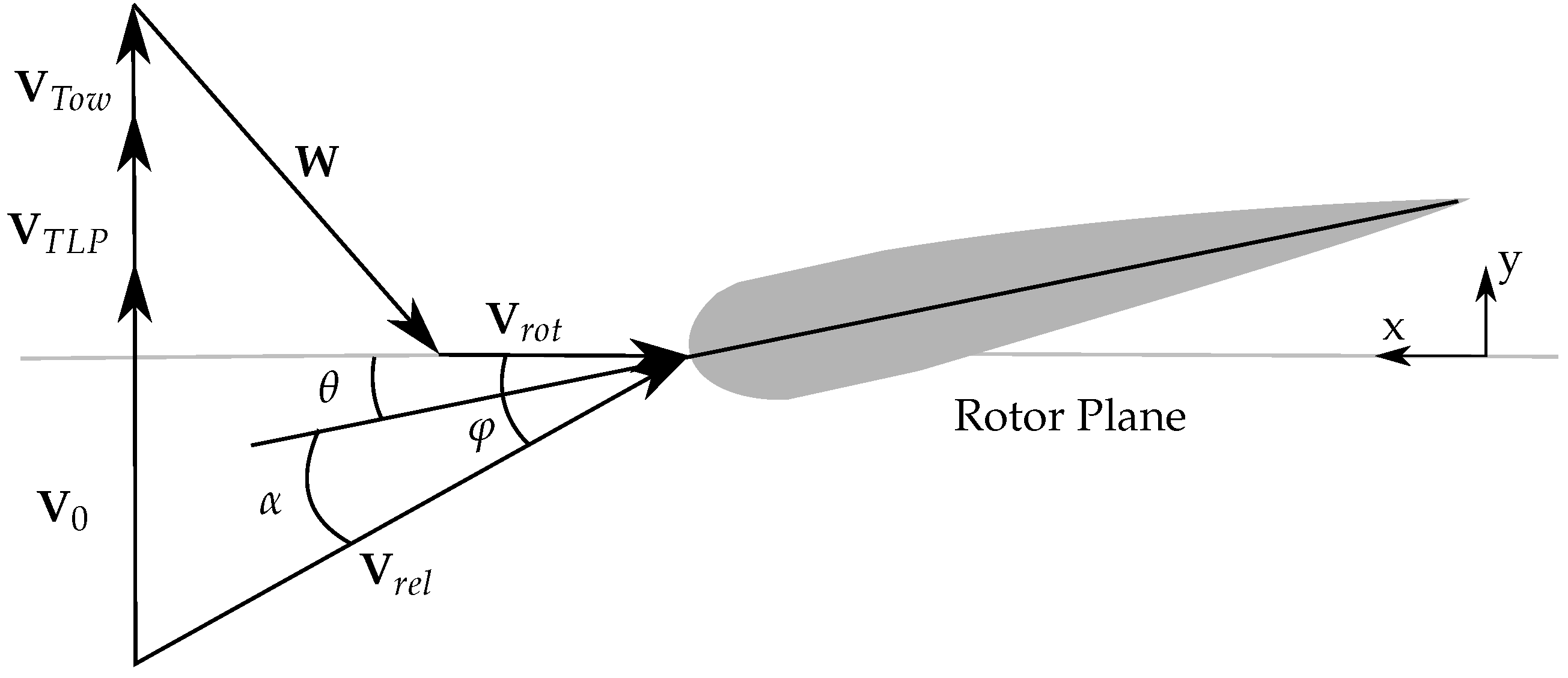
2.1. Aerodynamic Model
2.2. Hydrodynamic Model
2.3. Drive Train Model
2.4. Tower Modelling
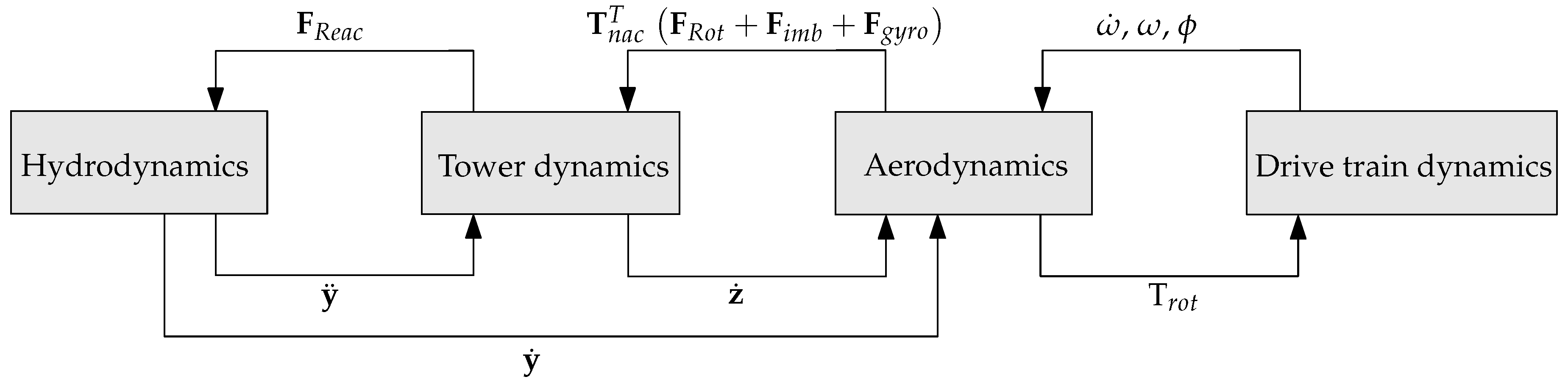
2.5. Coupling Model
2.6. FAST
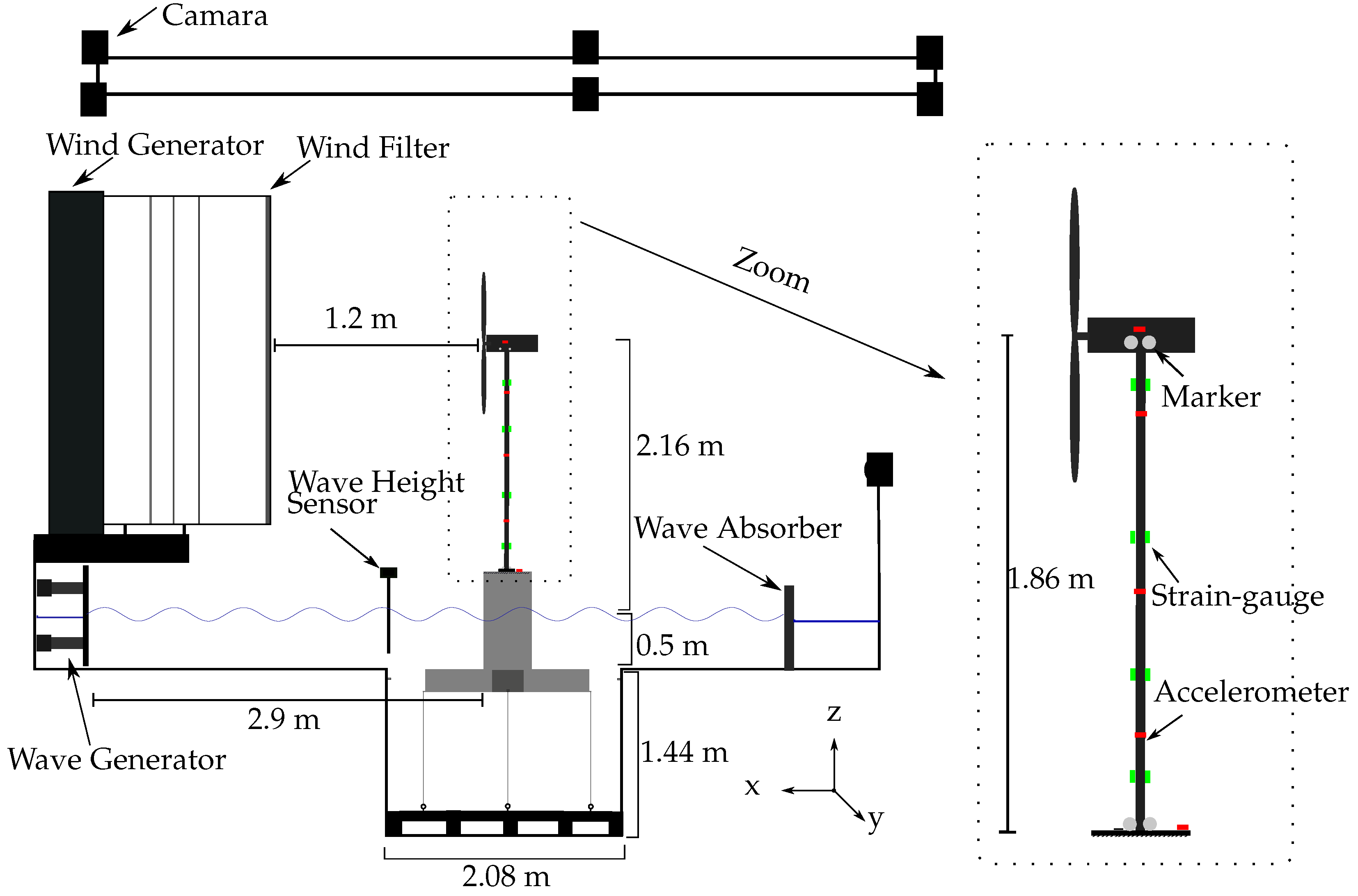
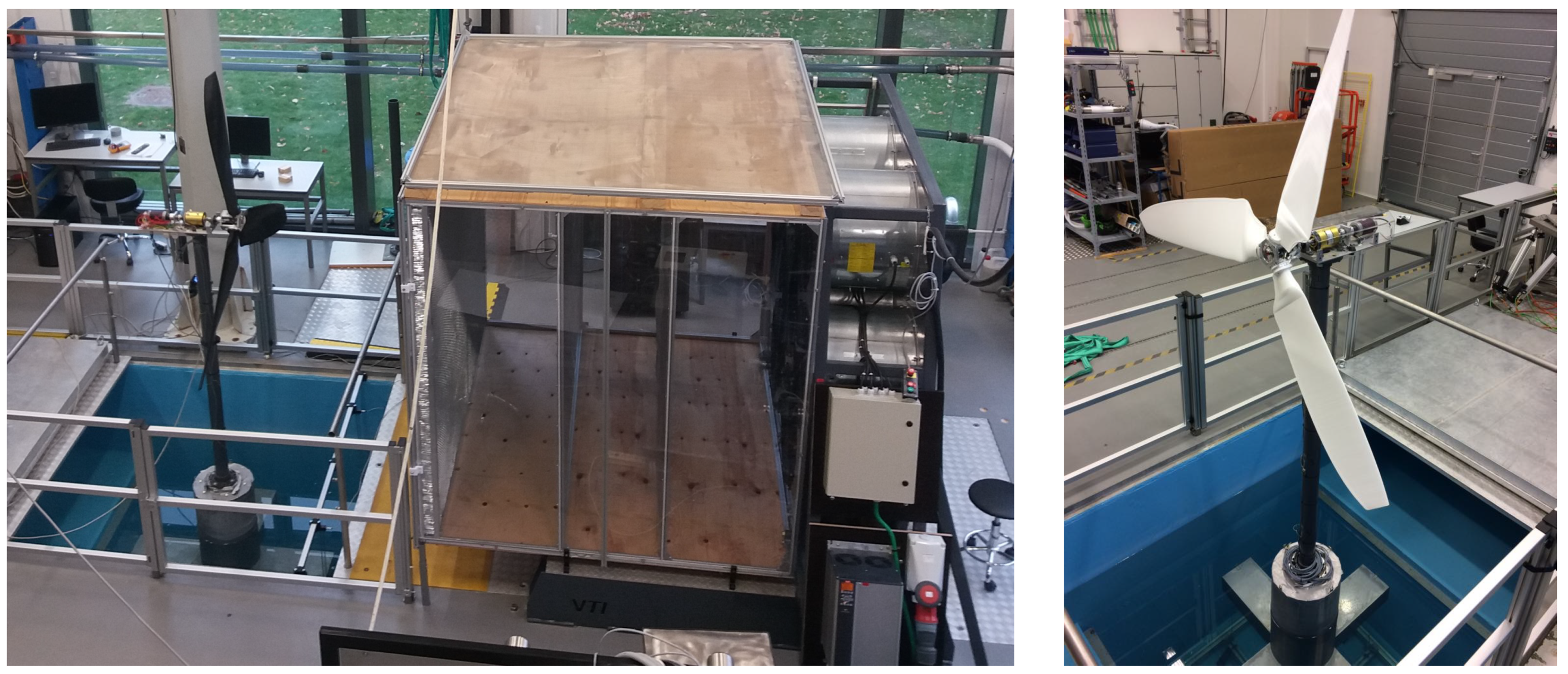
3. Experimental Setup
4. Results
4.1. Coupled Parameter Identification
4.2. Hydrodynamic Load
4.3. Aerodynamic Load
4.4. Aerodynamic and Hydrodynamic Load
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| BEM | Blade element method |
| FEM | Finite element method |
| F-A | Fore-aft |
| FOWT | Floating offshore wind turbine |
| JONSWAP | Joint north sea wave observation project |
| LCOE | Levelized cost of electricity |
| PM | Pierson–Moskowitz |
| PSD | Power spectral density |
| RPM | Rounds per minute |
| S-S | Side-side |
| TLP | Tension-leg platform |
| UBEM | Unsteady blade element method |
Nomenclature
| a | Axial induction factor |
| a′ | Tangential induction factor |
| A | Added mass of the TLP |
| Dynamic friction coeficient of drive train | |
| Potential damping matrix | |
| Linear viscous damping matrix | |
| Quadratic viscous damping matrix | |
| Br | Blade section distance vector |
| c | Chord length of blade section |
| Tower damping matrix of single element | |
| Global tower damping matrix | |
| Axial force coefficient | |
| Tangential force coefficient | |
| dr | Spanwise length of blade section |
| F | Prandtl’s tip loss factor |
| External loads on the tower | |
| Gyroscopic load vector | |
| Load vector due to mass imbalance of blades | |
| Thrust force on the rotor | |
| Load vector on tower arising from TLP acceleration | |
| Reaction force node from tower to the TLP | |
| Load vector on rotor | |
| First order wave forces on TLP | |
| FN | Normal force on blade section |
| FT | Tangential force on blade section |
| FT | Thrust force matrix |
| Identity matrix with size j times k | |
| Equivalent drive train mass moment of inertia | |
| Rotor mass moment of inertia | |
| Stiffness matrix of TLP | |
| Tower stiffness matrix of single element | |
| Global tower stiffness matrix | |
| Mass imbalance of blades | |
| , , | Moments caused by the rotor around the nacelle |
| Tower mass inertia matrix of single element | |
| Global tower mass inertia matrix | |
| Inertia matrix of TLP | |
| mr | Vector with blade sections masses |
| , | Direction vectors |
| NB | Number of blades |
| NS | Number of blade sections per blade |
| high to low speed gear ratio | |
| Zero matrix with size j times k | |
| , , | Acceleration, velocity and displacemnet of the TLP |
| Distance from rotor center to blade mass center | |
| R | Retardaton function matrix |
| Static drivetrain torque on low speed shaft | |
| Generatortorque on high speed shaft | |
| Rotor torque on low speed shaft | |
| Matrix for the direction of the imbalance loads | |
| Transformation matrix which isolates the center node of the nacelle in FEM of tower | |
| Transformation matrix for the reaction loads from the bottom node of the tower to the TLP | |
| Transformation matrix for the acceleration of the TLP into each node of tower | |
| u | Velocites of water particles |
| Free stream wind velocity | |
| Wind speed 19.5 m above sea surface | |
| Relative wind velocity | |
| Tangential velocity | |
| Velocity of TLP in surge | |
| Velocity of tower top in surge | |
| W | Induction velocity |
| , , | Tower global acceleration vector, velocity vector and displacement vector |
| Blade sections angle of attack | |
| tower damping weighting parameter | |
| blade pitch angle | |
| tower damping weighting parameter | |
| Tower damping ratio | |
| Blade sections geometrical twist | |
| Mean of displacement time series | |
| Solidity factor | |
| Density of air | |
| Standard deviation of displacement time series | |
| Blade sections flow angle | |
| Azimuth angle of rotor | |
| Angular frequency | |
| Wave spectrum peak frequency | |
| Angular speed of rotor | |
| Angular acceleration of rotor |
References
- Agency, I.E. World Energy Outlook 2018; International Energy Agency: Paris, France, 2018. [Google Scholar]
- Agency, I.E. Offshore Energy Outlook; International Energy Agency: Paris, France, 2018. [Google Scholar]
- Martin, H.R. Development of a Scale Model Wind Turbine for Testing of Offshore Floating Wind Turbine Systems. Master’s Thesis, The University of Maine, Orono, ME, USA, 2011. [Google Scholar]
- Koo, B.; Goupee, A.; Kimball, R.; Lambrakos, K. Model tests for a floating wind turbine on three different floaters. J. Offshore Mech. Arct. Eng. 2014, 136, 020907. [Google Scholar] [CrossRef]
- Stewart, G.; Lackner, M.; Robertson, A.J.J. Calibration and validation of a FAST floating wind turbine model of the DeepCwind scaled tension-leg platform. In Proceedings of the 22nd International Offshore and Polar Engineering Conference, Rhodes, Greece, 17–22 June 2012. [Google Scholar]
- Wendt, F.; Jonkman, J.; Robertson, A. FAST Model Calibration and Validation of the OC5-DeepCwind Floating Offshore Wind System Against Wave Tank Test Data. In Proceedings of the 27th International Ocean and Polar Engineering Conference, San Francisco, CA, USA, 25–30 June 2017. [Google Scholar]
- Sandner, F.; Amann, F.; Azcona, J.; Munduate, X.; Bottasso, C.; Campagnolo, F.; Robertson, A. Model building and scaled testing of 5MW and 10MW semi-submersible floating wind turbines. In Proceedings of the 12th Deep Sea Offshore Wind R&D Conference, EERA DeepWind’2015, Trondheim, Norway, 4–6 February 2015. [Google Scholar]
- Utsunomiya, T.; Nishida, E.; Sato, I. Wave response experiment on SPAR-type floating bodies for offshore wind turbine. In Proceedings of the 19th International Offshore and Polar Engineering Conference, Osaka, Japan, 21–26 July 2009. [Google Scholar]
- Utsunomiya, T.; Sato, T.; Matsukuma, H.; Yago, K. Experimental validation for motion of a spar-type floating offshore wind turbine using 1/22.5 scale model. In Proceedings of the 28th International Conference on Ocean, Offshore and Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009. [Google Scholar]
- Utsunomiya, T.; Matsukuma, H.; Minoura, S.; Ko, K.; Hamamura, H.; Kobayashi, O.; Sato, I.; Nomoto, Y.; Yasui, K. At sea experiment of a hybrid spar for floating offshore wind turbine using 1/10-scale model. In Proceedings of the 29th International Conference on Ocean, Offshore and Arctic Engineering, Shanghai, China, 6–11 June 2010. [Google Scholar]
- Utsunomiya, T.; Yoshida, S.; Ookubo, H.; Sato, I.; Ishida, S. Dynamic analysis of a floating offshore wind turbine under extreme environmental conditions. In Proceedings of the 32th International Offshore and Polar Engineering Conference, Anchorage, AK, USA, 30 June–5 July 2013. [Google Scholar]
- Utsunomiya, T.; Sato, I.; Yoshida, S.; Ookubo, H.; Ishida, S. Dynamic Response Analysis of a Floating Offshore Wind Turbine During Severe Typhoon Event. In Proceedings of the 32th International Offshore and Polar Engineering Conference, Anchorage, AK, USA, 30 June–5 July 2013. [Google Scholar]
- Roddier, D.; Cermelli, C.; Aubault, A.; Weinstein, A. WindFloat: A floating foundation for offshore wind turbines. J. Renew. Sustain. Energy 2010, 2, 033104. [Google Scholar] [CrossRef]
- Nielsen, F.G.; Hanson, T.D.; Skaare, B.r. Integrated dynamic analysis of floating offshore wind turbines. In Proceedings of the 25th International Conference on Offshore Mechanics and Arctic Engineering, Hamburg, Germany, 4–9 June 2006. [Google Scholar]
- Skaare, B.; Hanson, T.D.; Nielsen, F.G.; Yttervik, R.; Hansen, A.M.; Thomsen, K.; Larsen, T.J. Integrated dynamic analysis of floating offshore wind turbines. In Proceedings of the European Wind Energy Conference, Milan, Italy, 7–10 May 2007. [Google Scholar]
- Bredmose, H.; Mikkelsen, R.; Hansen, A.; Laugesen, R.; Heilskov, N.; Jensen, B.; Kirkegaard, J. Experimental study of the DTU 10 MW wind turbine on a TLP floater in waves and wind. In Proceedings of the EWEA Offshore 2015 Conference, Copenhagen, Denmark, 10–12 March 2015. [Google Scholar]
- Pegalajar-Jurado, A.; Hansen, A.M.; Laugesen, R.; Mikkelsen, R.F.; Borg, M.; Kim, T.; Heilskov, N.F.; Bredmose, H. Experimental and numerical study of a 10MW TLP wind turbine in waves and wind. J. Phys. Conf. Ser. 2016, 753, 092007. [Google Scholar] [CrossRef] [Green Version]
- Mikkelsen, R. The DTU 10MW 1:60 Model Scale Wind Turbine Blade; Technical Report; DTU Wind Energy; DTU Wind: Lyngby, Denmark, 2015. [Google Scholar]
- Azcona, J.; Bouchotrouch, F.; González, M.; Garciandía, J.; Munduate, X.; Kelberlau, F.; Nygaard, T.A. Aerodynamic thrust modelling in wave tank tests of offshore floating wind turbines using a ducted fan. J. Phys. Conf. Ser. 2014, 524, 012089. [Google Scholar] [CrossRef]
- Jessen, K.; Soltani, M.; Mortensen, S.M.; Laugesen, K.; Jensen, J.K. FAST Model of the Scaled Offshore Floating Wind Turbine AAUE-TLP. Available online: http://vbn.aau.dk/en/publications/fast-model-of-the-scaled-offshore-floating-wind-turbine-aauetlp(041490b1-3756-4204-b952-048440b5cc64).html (accessed on 21 March 2019).
- Hansen, M. Aerodynamics of Wind Turbines; Routledge: Abington, UK, 2015. [Google Scholar]
- Oye, S. A simple vortex model of a turbine rotor. In Proceedings of the Third IEA Symposium on aerodynamics of wind turbines, Harwell, UK, 16–17 November 1989. [Google Scholar]
- Øye, S. Dynamic stall simulated as time lag of separation. In Proceedings of the 4th IEA Symposium on the Aerodynamics of Wind Turbines, Enea Casaccia Research Laboratory, Rome, Italy, 20–21 November 1990. [Google Scholar]
- Signe, M.; Laugesen, K.; Jessen, K.; Jensen, J.; Soltani, M. Experimental Verification of the Hydro-elastic Model of A Scaled Floating Offshore Wind Turbine. In Proceedings of the 2018 IEEE Conference on Control Technology and Applications (CCTA), Hong Kong, China, 19–21 August 2019. [Google Scholar]
- Cummins, W. The Impulse Response Function and Ship Motions; Technical Report; David Taylor Model Basin: Washington, DC, USA, 1962. [Google Scholar]
- Bachynski, E.E. Design and Dynamic Analysis of Tension Leg Platform Wind Turbines. Ph.D. Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2014. [Google Scholar]
- Jain, A. Nonlinear coupled response of offshore tension leg platforms to regular wave forces. Ocean Eng. 1997, 24, 577–592. [Google Scholar] [CrossRef]
- Babarit, A. NEMOH, Laboratory for Research in Hydrodynamics. Energy, Environment, and Atmosphere. 2014. Available online: http://lheea.ec-nantes.fr/doku. php/emo/nemoh/start (accessed on 21 March 2019).
- Pérez, T.; Fossen, T.I. Time-vs. frequency-domain identification of parametric radiation force models for marine structures at zero speed. Model. Identif. Control. 2008, 29, 1–19. [Google Scholar] [CrossRef]
- Perez, T.; Fossen, T. A Matlab Tool for Parametric Identification of Radiation-Force Models of Ships and Offshore Structures. Model. Control. 2009, MIC-30, 1–15. [Google Scholar]
- Cook, R. Concepts and Applicatins of Finite Element Analysis, 4th ed.; Wiley India Pvt. Limited: Hoboken, NJ, USA, 2007. [Google Scholar]
- Paz, M. Structural Dynamics: Theory and Computation; Springer: New York, NY, USA, 2012. [Google Scholar]
- Andersen, L.; Nielsen, S.R. Elastic Beams in Three Dimensions. Aalborg University 2008. Available online: http://homes.civil.aau.dk/jc/FemteSemester/Beams3D.pdf (accessed on 21 March 2019).
- Autodesk Inventor; Autodesk: San Rafael, CA, USA, 2019.
- Nielsen, S.R.K. Vibration Theory, Linear Vibration Theory, 3rd ed.; Department of Civil Engineering, Aalborg University: Aalborg, Denmark, 2004; Volume 1. [Google Scholar]
- Jonkman, J.M.; Buhl, M.L., Jr. FAST User’s Guide-Updated August 2005; Technical Report; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2005.
- Meinert, P.; Andersen, T.L.; Frigaard, P. AwaSys 6 User Manual; Hydraulic and Coastal Engineering Laboratory Aalborg University: Aalborg, Denmark, 2014. [Google Scholar]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; Technical Report; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2009.
- Bachynski, E.E.; Moan, T. Design considerations for tension leg platform wind turbines. Mar. Struct. 2012, 29, 89–114. [Google Scholar] [CrossRef]
- Mercier, J. SeaStar Mini-TLP. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 3–6 May 1998. [Google Scholar]
- Matha, D. Model Development and Loads Analysis of an Offshore Wind Turbine on a Tension Leg Platform with a Comparison to Other Floating Turbine Concepts: April 2009; Technical Report; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2010.
- Schaarup, J. Guidelines for Design of Wind Turbines; Det Norske Veritas A/S: Oslo, Norway, 2007. [Google Scholar]
- Murtagh, P.; Basu, B.; Broderick, B. Along-wind response of a wind turbine tower with blade coupling subjected to rotationally sampled wind loading. Eng. Struct. 2005, 27, 1209–1219. [Google Scholar] [CrossRef]
- Hasselmann, K.; Barnett, T.; Bouws, E.; Carlson, H.; Cartwright, D.; Enke, K.; Ewing, J.; Gienapp, H.; Hasselmann, D.; Kruseman, P.; et al. Measurements of Wind-Wave Growth and Swell Decay during the Joint North Sea Wave Project (JONSWAP); Deutches Hydrographisches Institut: Hamburg, Germany, 1973. [Google Scholar]
- Veers, P.S. Three-Dimensional Wind Simulation; Technical Report; Sandia National Labs: Albuquerque, NM, USA, 1988.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | 5 MW NREL | 1/35 | AAUE-TLP |
|---|---|---|---|
| Nacelle mass (kg) | 24,000 | 5.60 | 10.2 |
| Hub mass (kg) | 56,780 | 1.32 | 2.02 |
| Blade mass (kg) | 17,740 | 0.41 | 0.76 |
| Total Top mass (kg) | 350,000 | 8.16 | 12.0 |
| Hub diameter (m) | 3 | 0.09 | 0.13 |
| Blade length (m) | 61.5 | 1.76 | 0.99 |
| Cut-in/Rated/Cut-out wind speed (m/s) | 3/11.5/25 | 0.5/1.9/4.2 | 3/7/11 |
| Item | 5 MW NREL | 1/35 | AAUE-TLP |
|---|---|---|---|
| Height (m) | 90.0 | 2.57 | 2.11 |
| Base length (m) | 10 | 0.29 | 0.30 |
| Tower mass (kg) | 347,460 | 8.10 | 4.74 |
| Diameter (t/b) (m) | 3.87/6.0 | 0.11/0.17 | 0.09/0.09 |
| Length (m) | 77.6 | 2.22 | 1.81 |
| Thickness (t/b) (mm) | 19/27 | 0.54/0.77 | 6.70/6.70 |
| Young’s modulus (GPa) | 210 | 6.0 | 3.15 |
| Shear modulus (GPa) | 80.8 | 2.31 | 1 |
| Density (kg/m3) | 8500 | 8500 | 1503 |
| Struct.-damp. ratio (%) | 1.0 | 1.0 | 2.5 |
| Item | 5 MW NREL | 1/35 | AAUE-TLP |
|---|---|---|---|
| Hub inertia (kg m2) | 115,926 | 2.2 × 10−3 | 4.0 × 10−3 |
| Blade inertia (kg m2) | 11,776,046 | 0.22 | 0.22 |
| Generator inertia (kg m2) | 5,025,500 | 0.10 | 8.4 × 10−3 |
| Equivalent inertia (kg m2) | 40,469,564 | 0.77 | 0.66 |
| Gearbox ratio (-) | 1:97 | 1:97 | 1:28.9 |
| Gearbox effciency (%) | 100 | 100 | 75 |
| Viscous friction (Nms) | 6,215,000 | 0.70 | 0.43 |
| Item | SeaStar Mini/GLGH | 1/35 | AAUE-TLP |
|---|---|---|---|
| Main cyl. dia. (m) | 14/8.25 | 0.40/0.24 | 0.40 |
| Main cyl. height (m) | 32/39 | 0.91/1.11 | 1.00 |
| Platform radius (m) | 28/25 | 0.80/0.71 | 0.70 |
| Draft (m) | 19/19 | 0.54/0.54 | 0.70 |
| Pontoon width (m) | 6/6 | 0.17/0.17 | 0.25 |
| Pontoon height (m) | 6/6 | 0.17/0.17 | 0.20 |
| Foundation mass (kg) | 1293 × 103/859 × 103 | 30.16/20.04 | 114 |
| Displaced vol. (m3) | 5655/4114 | 0.13/0.10 | 0.18 |
| Item | MIT-TLP | 1/35 | AAUE-TLP |
|---|---|---|---|
| No. of tethers lines per spoke | 2 | 2 | 1 |
| Young’s modulus (GPa) | 118.4 | 3.38 | 57.30 |
| Diameter (m) | 0.127 | 3.6 × 10−3 | 1.0 × 10−3 |
| Unstretched length (m) | 151.73 | 4.33 | 1.05 |
| Spring stiffness (kN/m) | 19,700 | 16.08 | 34.11 |
| 6 m/s | 7 m/s | 8.6 m/s | |||||
|---|---|---|---|---|---|---|---|
| (mm) | (mm) | (mm) | (mm) | (mm) | (mm) | ||
| Experiment | 15.4 | 1.3 | 21.6 | 1.7 | 21.2 | 1.7 | |
| TLP | FAST | 23.0 | 3.9 | 31.6 | 5.4 | 32.7 | 6.2 |
| Theoretical | 26.6 | 2.6 | 34.9 | 3.5 | 32.2 | 3.0 | |
| Experiment | 5.3 | 1.5 | 8.8 | 1.7 | 7.2 | 1.9 | |
| Tower Top | FAST | 5.3 | 1.1 | 7.6 | 0.9 | 7.3 | 1.8 |
| Theoretical | 8.8 | 1.1 | 11.2 | 1.3 | 9.5 | 1.7 | |
| 4 m/s | 7 m/s | 8.6 m/s | |||||
|---|---|---|---|---|---|---|---|
| (mm) | (mm) | (mm) | (mm) | (mm) | (mm) | ||
| Experiment | 7.2 | 3.2 | 21.4 | 3.3 | 20.9 | 3.7 | |
| TLP | FAST | 10.7 | 3.2 | 31.5 | 5.4 | 32.4 | 4.2 |
| Theoretical | 9.9 | 3.1 | 35.0 | 3.9 | 32.7 | 4.1 | |
| Experiment | 2.6 | 1.1 | 8.6 | 1.8 | 7.5 | 2.0 | |
| Tower Top | FAST | 2.3 | 0.7 | 7.6 | 1.0 | 7.2 | 1.7 |
| Theoretical | 3.1 | 0.9 | 11.2 | 1.5 | 9.8 | 1.7 | |
| 4 m/s | 7 m/s | 8.6 m/s | |||||
|---|---|---|---|---|---|---|---|
| (mm) | (mm) | (mm) | (mm) | (mm) | (mm) | ||
| Experiment | 7.3 | 0.5 | 21.5 | 1.2 | 21.2 | 1.2 | |
| TLP | FAST | 10.7 | 2.6 | 31.6 | 5.6 | 42.0 | 5.1 |
| Theoretical | 9.9 | 1.2 | 34.7 | 3.0 | 33.0 | 4.0 | |
| Experiment | 2.5 | 1.4 | 8.9 | 1.9 | 7.5 | 2.1 | |
| Tower Top | FAST | 2.3 | 0.8 | 7.6 | 0.9 | 11.2 | 1.0 |
| Theoretical | 3.1 | 1.2 | 11.1 | 1.6 | 9.9 | 1.9 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jessen, K.; Laugesen, K.; M. Mortensen, S.; K. Jensen, J.; N. Soltani, M. Experimental Validation of Aero-Hydro-Servo-Elastic Models of a Scaled Floating Offshore Wind Turbine. Appl. Sci. 2019, 9, 1244. https://doi.org/10.3390/app9061244
Jessen K, Laugesen K, M. Mortensen S, K. Jensen J, N. Soltani M. Experimental Validation of Aero-Hydro-Servo-Elastic Models of a Scaled Floating Offshore Wind Turbine. Applied Sciences. 2019; 9(6):1244. https://doi.org/10.3390/app9061244
Chicago/Turabian StyleJessen, Kasper, Kasper Laugesen, Signe M. Mortensen, Jesper K. Jensen, and Mohsen N. Soltani. 2019. "Experimental Validation of Aero-Hydro-Servo-Elastic Models of a Scaled Floating Offshore Wind Turbine" Applied Sciences 9, no. 6: 1244. https://doi.org/10.3390/app9061244
APA StyleJessen, K., Laugesen, K., M. Mortensen, S., K. Jensen, J., & N. Soltani, M. (2019). Experimental Validation of Aero-Hydro-Servo-Elastic Models of a Scaled Floating Offshore Wind Turbine. Applied Sciences, 9(6), 1244. https://doi.org/10.3390/app9061244