1. Introduction
As traditional energy sources have been increasingly exhausted over the past decades, renewable energy, especially wind energy, has received more attention than ever before. Wind energy has less environmental pollution and can reduce greenhouse gas emissions such as carbon dioxide. Because wind energy has such good properties and meets the expectations of improving the global climate, it has been promoted and developed over the past few decades, and the technology is becoming more mature. According to relevant reports, the annual share of wind energy used to generate electricity in the world is increasing, and has reached 2.74 × 10
9 MW [
1]. On the other hand, in wind energy production, due to factors such as the environment, for example, the open space on the sea is rarely obstructed, and it is significantly different from the land, so that the average speed of the wind is 90% higher than that on the land [
2]. At present, the fixed bottom offshore wind turbines that are favored worldwide mainly include the following forms: single piles, tripods, and jackets. These structures are mostly used in shallow-water offshore wind facilities. However, with the increase of water depth, the construction cost of fixed-bottom offshore wind turbines with fixed foundations such as pile-supported foundations significantly increases, especially when the water depth exceeds 50 m. The floating foundation anchors the floating structure to the seabed using an anchoring system and serves as a base platform for installing wind turbines. Compared with the fixed foundation of the offshore wind turbines, the floating foundations of wind turbines have the advantage that the installation position of the floating foundation can be moved easily. It can be installed in deeper waters with more abundant wind energy, not necessarily limited to shallow water shelves with limited area. In comparison, the floating base applicable in the sea area is much larger than that in the shallow sea area; it is installed in the waters far away from the coastline, eliminating the visual impact and greatly reducing the influence of noise and electromagnetic waves [
3]. Since floating offshore wind turbines have many of the advantages described above, in the field of wind turbines, researchers have conducted extensive research work on them in order to install wind turbines on floating devices [
4,
5,
6,
7]. At the same time, on the technical level, since offshore oil rigs have been operating safely for decades, a large amount of empirical data has been accumulated to ensure the long-term use of floating structures in the marine environment. This provides sufficient conditions for the design and construction of a floating wind turbine. Floating offshore wind turbines (FOWT) [
8] are particularly suitable for use in waters with a depth of more than 50 m [
4], so it is a more worthwhile option for offshore wind farms that meet this condition and can achieve more economic benefits. According to relevant information, in June 2009, the 2.3 MW Hywind facility, the world’s first large-scale floating wind turbine, was towed to a Norwegian North Sea location with a water depth of about 220 m (722 feet) and began operation. The Hywind Floating Wind Turbine is the first large-scale wind turbine supported by an underwater floating structure similar to ones used by off-shore oil rigs. The project is running successfully and the turbine has produced over 80 GWh of energy to date [
9]. Inspired by the success of the Hywind Demo, the Scottish government has approved Statoil plans for the 30 MW Hywind 2 floating offshore wind project some 25 km off Peterhead. The Norwegian company was issued with a marine license to build five Siemens 6 MW turbines on spar foundations [
10,
11]. It is expected that the farm could power up to 19,900 homes.
Even though the concept of a FOWT was proposed by Heronemus [
12] in 1972, due to the immature technology at that time, the concept of FOWT was not widely known until the mid 1990s. Since then, several floating support platform configurations have been developed, and the performance of these concepts has been tested both experimentally and numerically. FOWTs can be divided into three categories: spar type [
13,
14,
15], semi-submersible type [
16,
17,
18,
19,
20], and tension leg platform type [
21,
22]. The Hywind concept developed by Statoil [
13] is based on a slender deep draft substructure and is a typical spar type FOWT. Numerical studies [
23,
24,
25,
26], experiments, as well as long-term prototype tests [
9] were carried out for the proportional models [
27,
28,
29]. Due to the excellent stability of the spar buoys, after continuous theoretical research and on-site monitoring, the Hywind concept was finally commercialized in the world’s first floating wind farm, Hywind Scotland [
30] in 2017, which is a milestone in the history of offshore wind turbines. The semi-submersible foundation has unique advantages compared to the foundation of the spar and tension leg platform (TLP) type, because the semi-submersible foundation is simple in construction, regular in shape, simple in assembly, small in size, modular, and easy to assemble and debug [
17]. These steps can be carried out at the dock site, and the structure after installation can be transported to the designated location by tugboat. On the other hand, the installation cost of the mooring system is also significantly lower than that of the other two types of foundations. In addition, due to the large draft of the semi-submersible foundation, the natural period of the heave motion response is longer, so the hydrodynamic characteristics caused by the wind load are better [
31]. According to the relevant research results, the semi-submersible foundation’s motion response shows an interesting law. The surge response is similar to the spar type, but the pitch motion is smaller [
32]. In recent years, scholars have conducted a lot of researches and proposed many concepts on FOWT. The National Renewable Energy Laboratory (NREL) has developed a 5 MW baseline wind turbine [
33]. In the Offshore Code Comparison Collaboration (OC3) phase, a spar floating platform called OC3-Hywind was designed [
34]. In one phase of the Offshore Code Comparison Collaboration Continuation (OC4), a semi-submersible type platform (DeepCwind) was designed [
20], which is another concept of FOWT. It relies on large columns linked by braces to maintain stability, showing good wave-resistance ability.
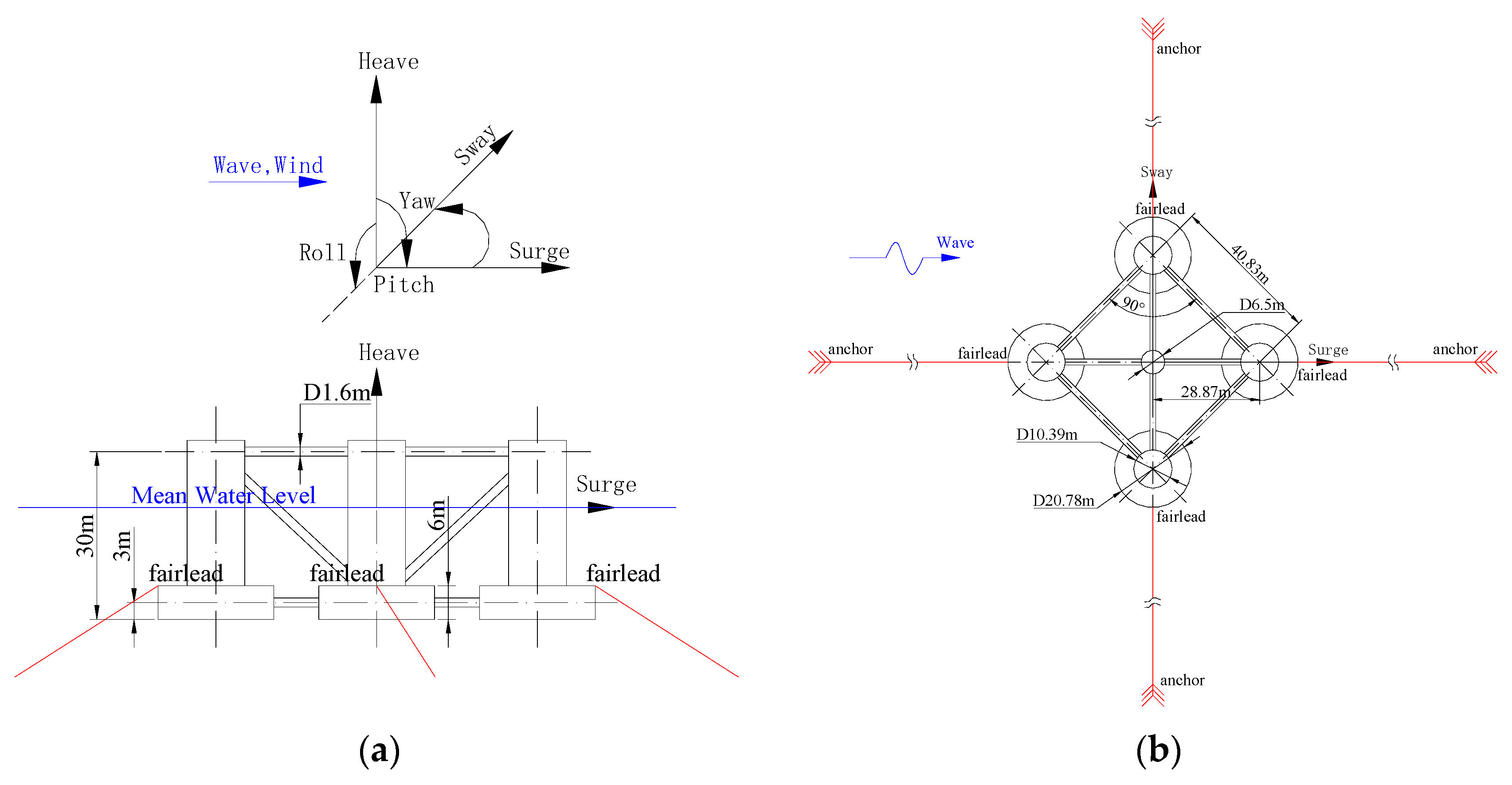
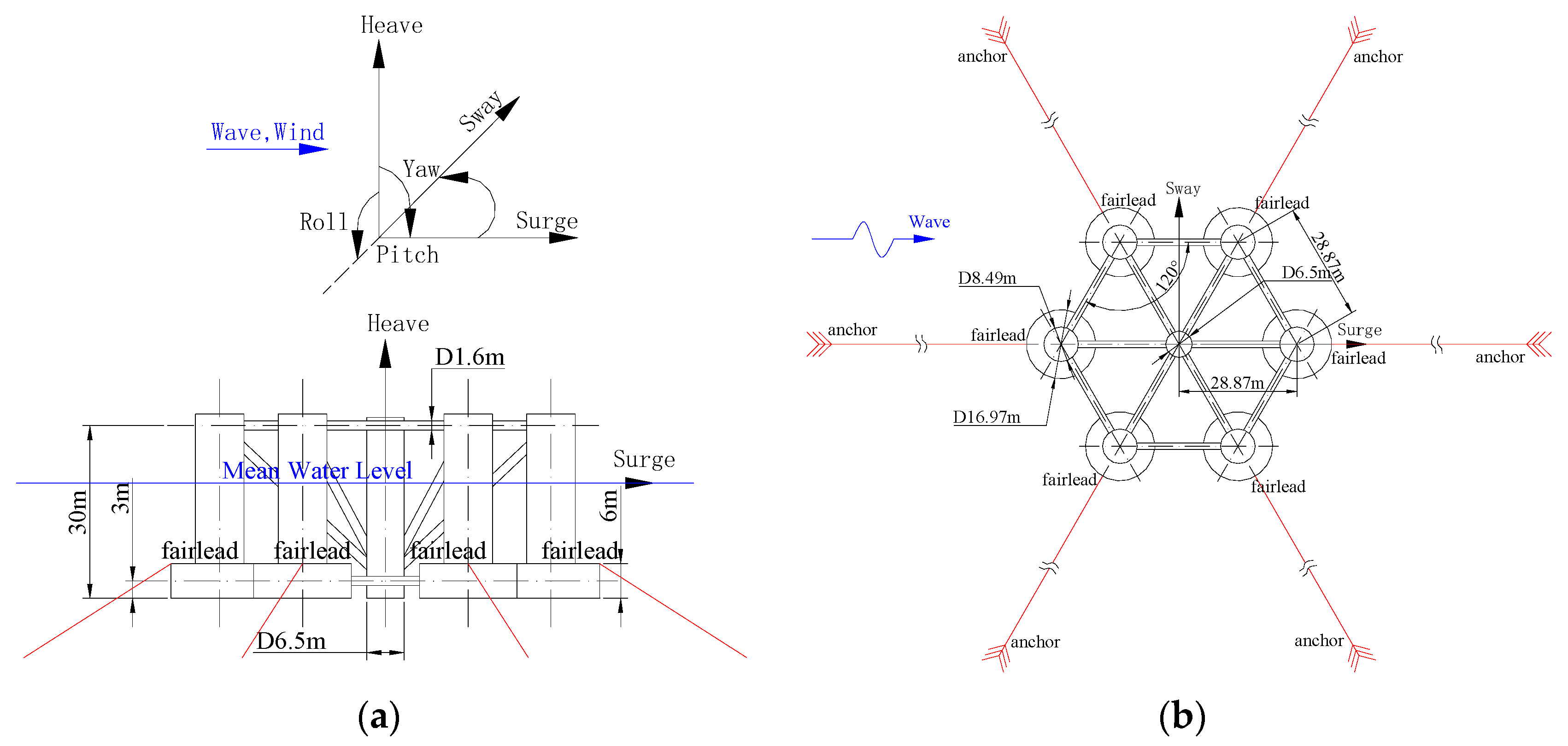
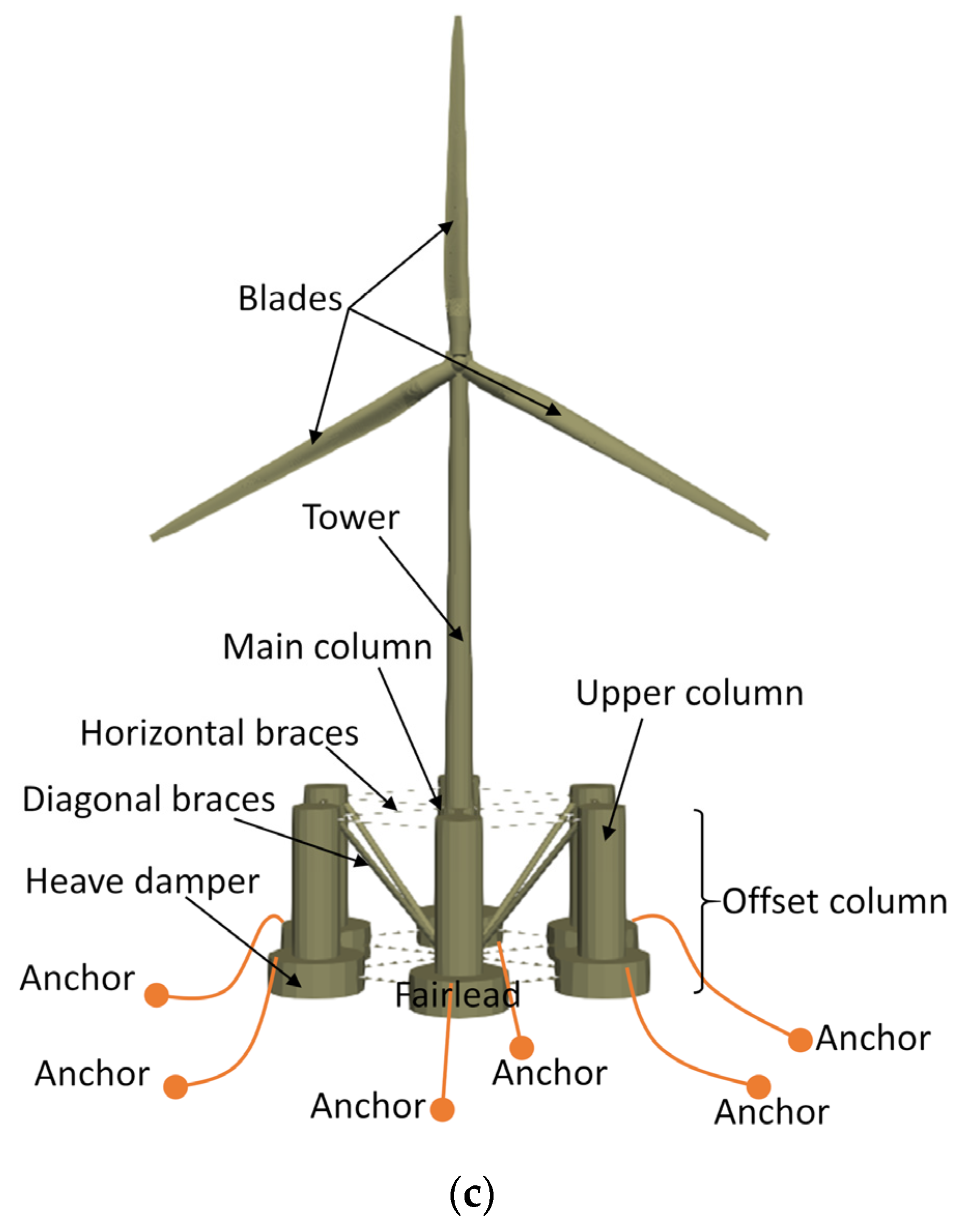
In this paper, a modification based on the original DeepCwind semi-submersible FOWT is carried out, in which the number of the floating columns is changed but the total weight remains unchanged. The calculations are performed using fully coupled in-house codes, and the results are analyzed to reveal the effects of the number of the floating columns to the dynamic response of the DeepCwind semi-submersible FOWT.
Section 2 introduces the quasi-static theory of the mooring system and the calculation of the dynamics of the platform structure using the potential flow theory.
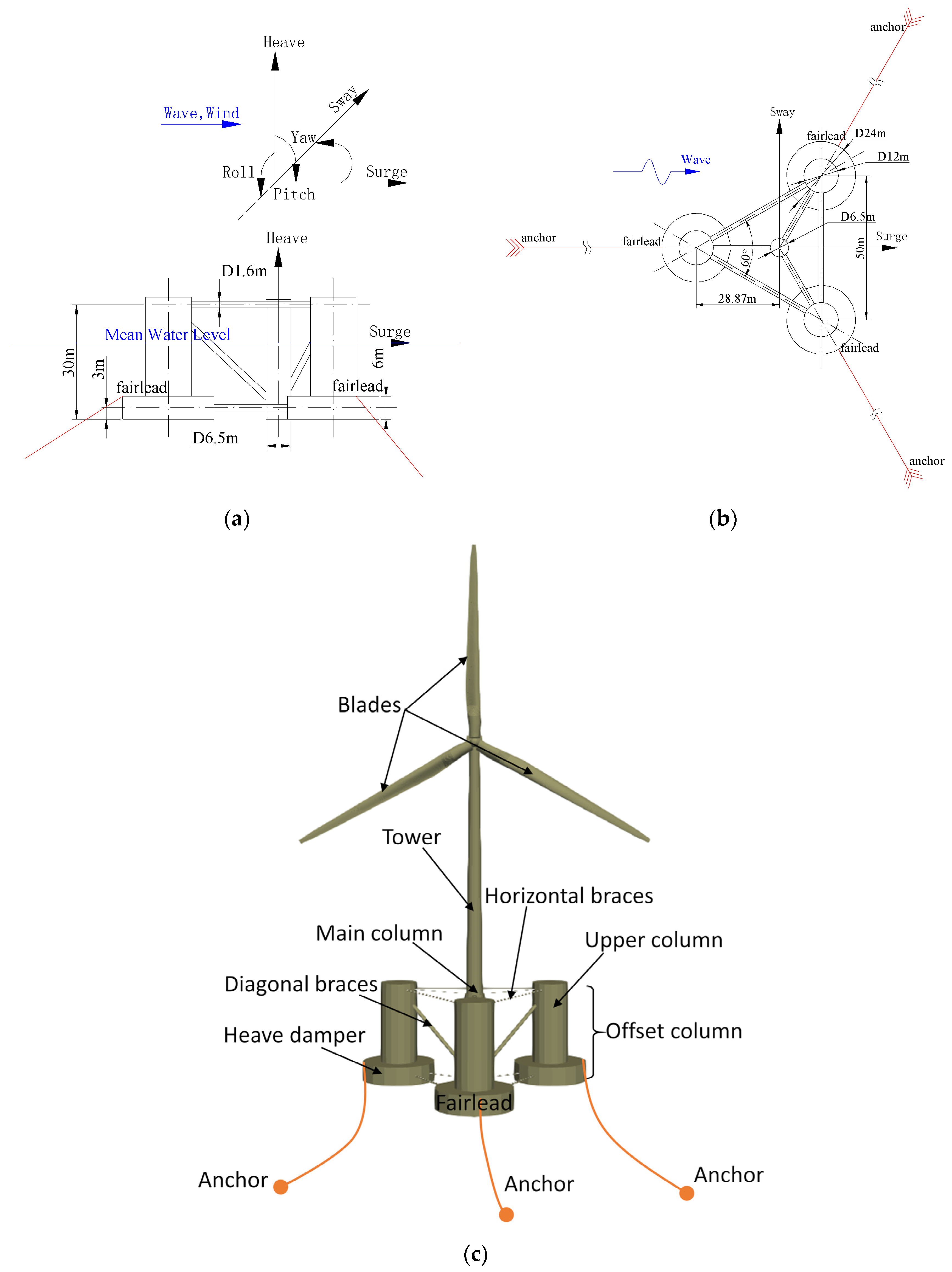
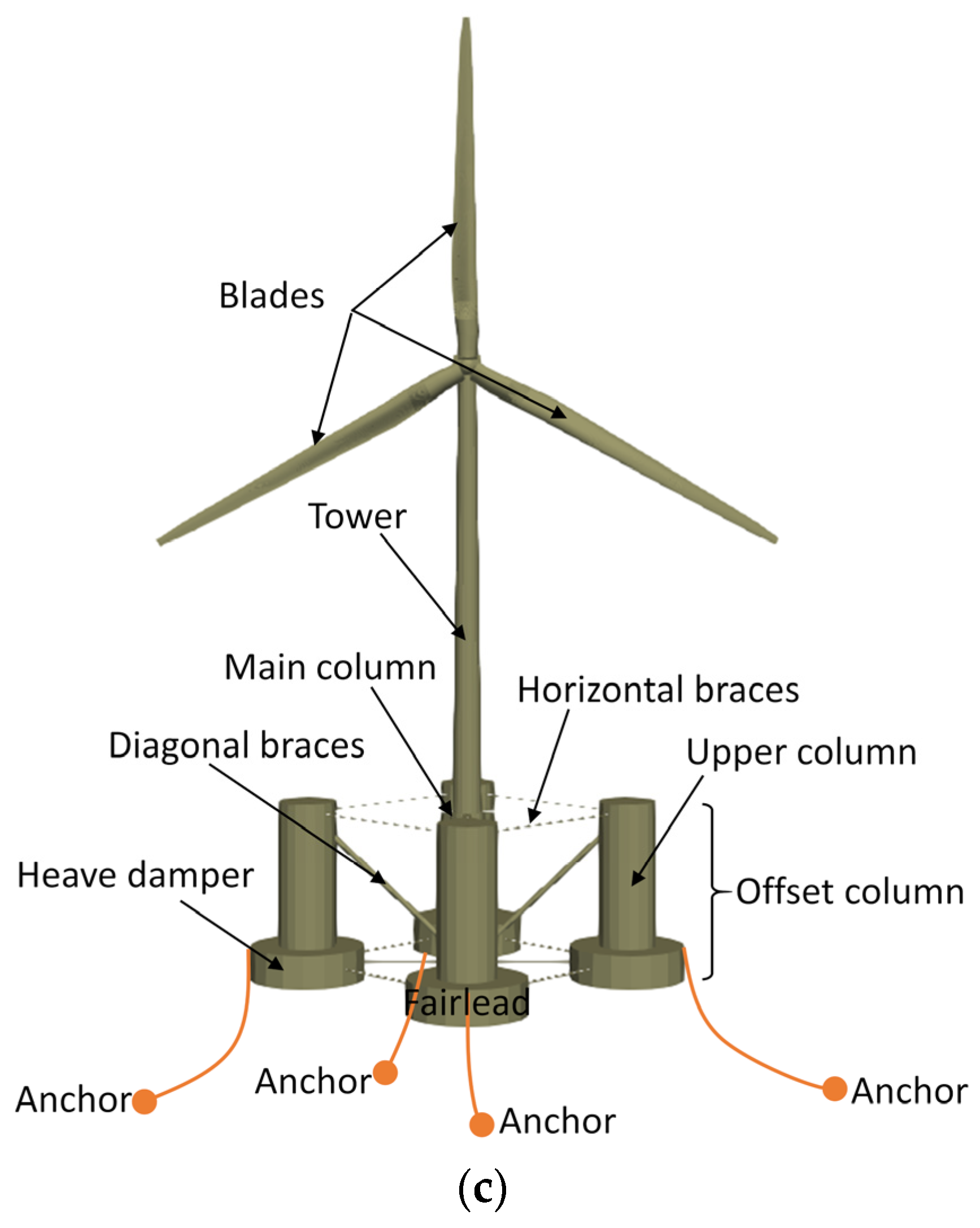
Section 3 describes the details about the wind turbine, floating platforms, and mooring systems. In
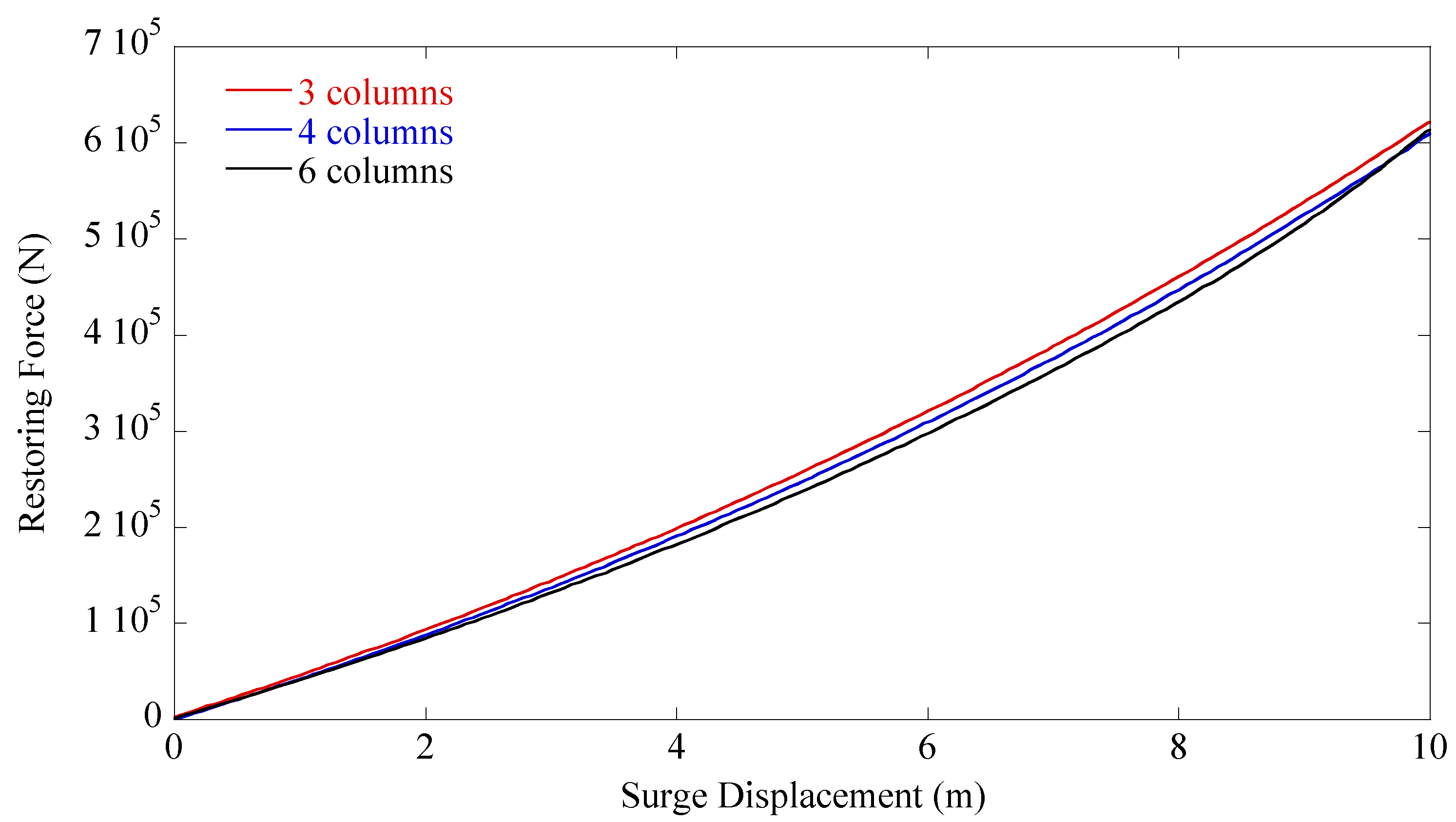
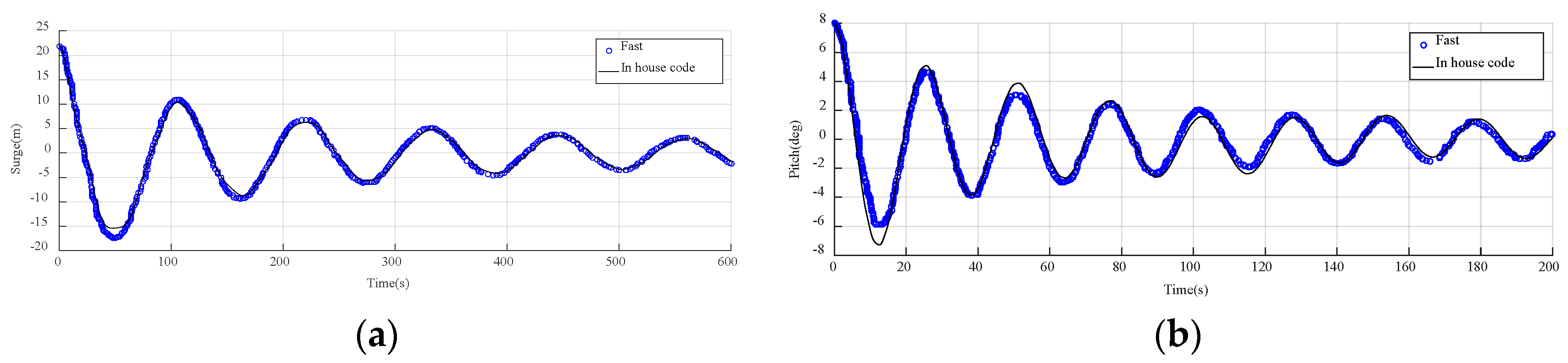
Section 4, the dynamic response of the FOWT is studied, and the effects from the number of the floating columns is obtained.
2. FOWT Coupled Dynamics Theory
From the development process of wind turbines, it can be found that the initial environmental load on the onshore wind turbine is mainly the wind load acting on the wind turbine blades. For fixed bottom wind turbines operating in shallow water offshore areas, in addition to being subjected to wind loads, the support structure is also subjected to hydrodynamic loads. However, for the FOWT studied in this article, the situation is more complicated. In addition to those forces already listed, wind loads acting on the wind turbine blades are transmitted to the floating platform through the rotor-nacelle components and towers; at the same time, the mooring tension received by the mooring system is also transmitted to the floating platform. These affect the dynamic response of the floating platform. On the other hand, the movement of the floating platform in turn causes relative motion between the platform and the wind turbine blades, affecting the aerodynamic forces on the blades. The reactions between the various components of the structure are complex and coupled, making the dynamic response of FOWT difficult to predict and full of challenges. The blades–tower–platform coupling system is non-linear, which is different from the traditional structures. The high-frequency effects have not been considered in this paper. Instead, this research considers the wind turbine tower as a rigid body, and only the platform’s six degrees of freedom are considered to calculate the low-frequency response of the platform. In the following, the theories for calculating the mooring system and the platforms are briefly introduced.
2.1. Mooring System
The solution to the analytical equation of the catenary between the two fixed points has been thoroughly studied, and many practical solutions have been obtained [
35,
36]. For the mooring line of a floating wind turbine, due to the uniform thickness and mass distribution of the cable, no horizontal force acts on the line between the anchor and the fairlead [
37]. During the working process, the mooring line may be partially shelved on the seabed. When the shelf length is zero, the entire mooring line is in the water. If a portion of the mooring line rests on the seabed, the analytical equation is as follows:
where,
and
are the cable profile in horizontal and vertical planes at distance
s along the line, respectively;
FH and
FV are the horizontal and vertical components of the effective tension in the mooring line at the fairlead [
38];
EA is the cross–section axial stiffness;
L denotes the upstretched line length;
CB is the coefficient of static friction between the seabed and the mooring line;
ω =
gA(
ρc −
ρ) is the weight per unit length in the submerged fluid;
ρc is the cable density,
ρ means the fluid density; and
g is the acceleration due to gravity. It is worth noting that Equations (1) and (2) are established in the local coordinate system and can be solved by an iterative method.
2.2. Platform
For the entire nonlinear system, all forces acting on the entire structure should be balanced. For floating platforms, the received external forces mainly include platform gravity, hydrodynamics, and mooring line tension of the mooring system. This part shows the forces modeled in in-house code when using a potential flow theory approach. The forces and added mass are applied at the platform reference point in the theory. The potential flow theory is used to calculate hydrodynamics and is expressed as follows [
33]:
in which,
where,
is the total load at the platform reference point;
is the incident-wave excitation force at the platform reference point;
is the hydrostatic force at the reference node;
is the radiation memory-effect force at the reference point; and
is the total added mass force from all contributions.
The terms of the general equation are discussed separately.
is the added-mass due to radiation at the reference point;
is the linear acceleration of the structure;
is the Fourier transform of a white noise time series with zero mean and unit variance;
is the desired power spectral density of the wave elevation per unit time, this paper uses the P–M spectrum;
is wave-excitation force array normalized per unit wave amplitude;
is the frequency;
β is the incident wave direction angle;
j is the number of degrees of freedom (DOF);
n is the discrete-time-step counter;
k is the discrete-frequency-step counter;
N is the number of discrete steps;
is the buoyancy and equals the platform weight;
is the volume of the immersed part of the platform;
is the component of the Kronecker–Delta function;
is the hydrostatic-restoring matrix;
x is the platform motion;
t is time;
is the radiation kernel from potential flow theory; and
is the platform velocity. The details of this method can be referred in the study by Jonkman [
33].
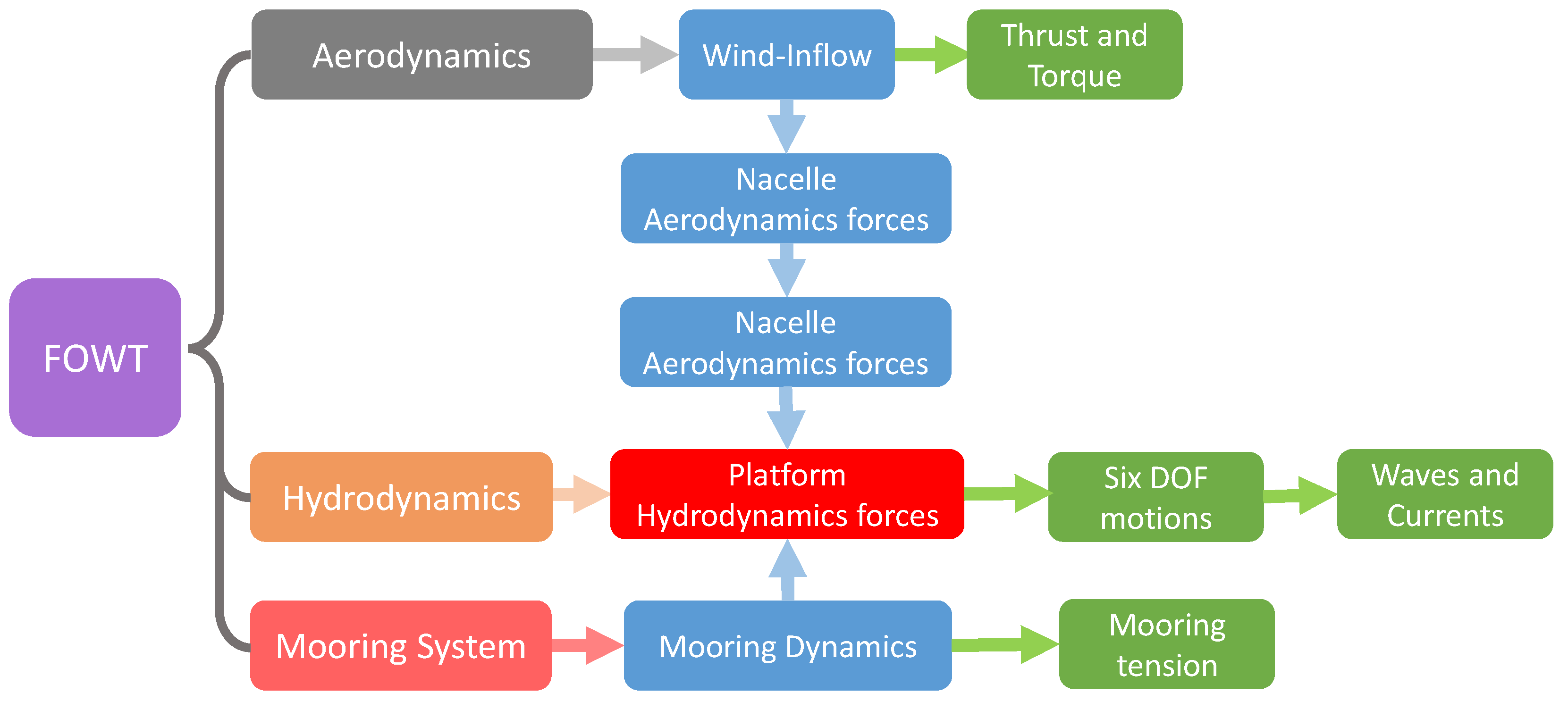
Based on the theories introduced above, a program for coupling computation of the FOWT was developed in this work. The coupled dynamic response of FOWT consists of three parts, namely the aerodynamics of the wind turbine, the hydrodynamics of the floating platform, and the response of the mooring system. Since this paper mainly studies the dynamic response of floating platforms with different structural forms under the condition of the number of offset columns, only the calculation theory of the latter two parts with more important influences is considered.
Figure 1 shows the structure of the in-house developed code, consisting of the calculations of the wind inflow, aerodynamics, waves, sea current, hydrodynamics, and dynamics of the floater.
We regard the tower as a rigid body and only the low-frequency response of the platform with six degrees of freedom is studied. The high-frequency responses of the system, such as the high-frequency vibrations of the blade and the tower, are not considered. Therefore, the turbine–tower interaction is not taken into consideration in the present research.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}