The Detection and Recognition of RGB-LED-ID Based on Visible Light Communication using Convolutional Neural Network

 ,
,
Abstract
:1. Introduction
2. Related Work
3. Theory
3.1. Receiver and Transmitter
3.2. Color Theory
3.3. Convolutional Neural Network
4. Experimental Section
4.1. Experimental Setup
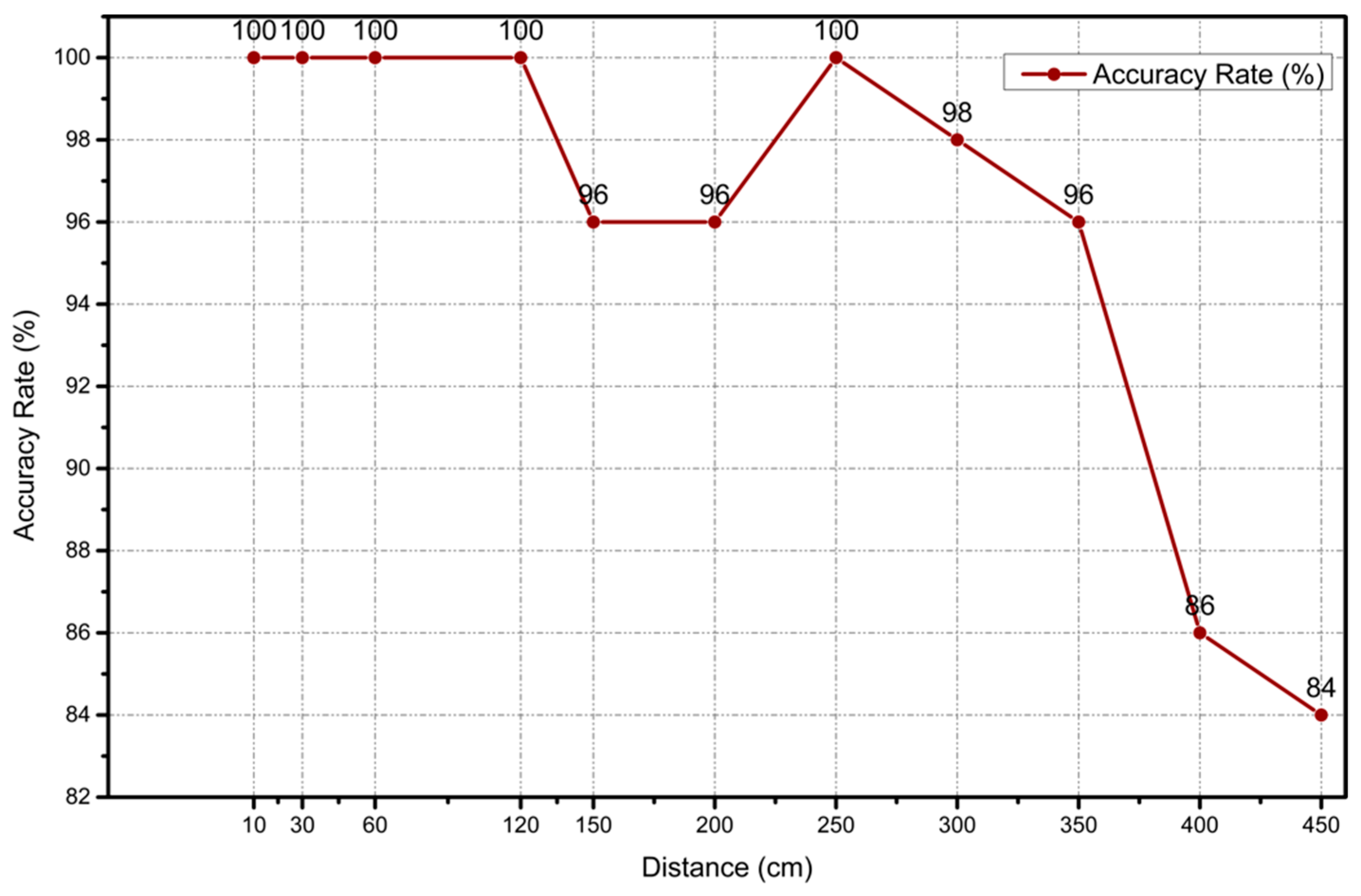
4.2. Distance and LED-OFC Recognition Result Analysis
4.3. Frequency Resolution and LED-OFC Recognition Result Analysis
4.3.1. Low Frequency Range
4.3.2. High Frequency Range
4.4. Duty Ratio and LED-OFC Recognition Result Analysis
4.5. Phase Difference Resolution and LED-OFC Recognition Result Analysis
4.6. Encoding Sequence and LED-OFC Recognition Result Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jin, F.; Li, X.; Zhang, R.; Dong, C.; Hanzo, L. Resource Allocation Under Delay-Guarantee Constraints for Visible-Light Communication. IEEE Access 2017, 4, 7301–7312. [Google Scholar] [CrossRef]
- Fang, J.; Yang, Z.; Long, S.; Wu, Z.; Zhao, X.; Liang, F.; Jinag, Z.L.; Chen, Z. High-speed indoor navigation system based on visible light and mobile phone. IEEE Photonics J. 2017, 9, 1–11. [Google Scholar] [CrossRef]
- Xie, C.; Guan, W.; Wu, X.; Fang, L.; Cai, Y. The LED-ID Detection and Recognition Method based on Visible Light Positioning using Proximity Method. IEEE Photonics J. 2018, 10, 1–16. [Google Scholar] [CrossRef]
- Zhang, B.; Ren, K.; Xing, G.; Fu, X.; Wang, C. SBVLC: Secure barcode-based visible light communication for smartphones. IEEE Trans. Mob. Comput. 2006, 15, 432–446. [Google Scholar] [CrossRef]
- Chen, H.W.; Wen, S.S.; Liu, Y.; Fu, M.; Weng, Z.C.; Zhang, M. Optical camera communication for mobile payments using an LED panel light. Appl. Opt. 2018, 57, 5288–5294. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Gao, Q.; Gong, C.; Xu, Z. User Grouping and Power Allocation for NOMA Visible Light Communication Multi-Cell Networks. IEEE Commun. Lett. 2017, 21, 777–780. [Google Scholar] [CrossRef]
- Islim, M.S.; Ferreira, R.X.; He, X.; Xie, E.; Videv, S.; Viola, S.; Watson, S.; Bamiedakis, N.; Penty, R.V.; White, I.H.; et al. Towards 10 Gb/s orthogonal frequency division multiplexing-based visible light communication using a GaN violet micro-LED. Photonics Res. 2017, 5, A35–A43. [Google Scholar] [CrossRef]
- Lin, B.; Tang, X.; Yang, H.; Ghassemlooy, Z.; Zhang, S.; Li, Y.; Lin, C. Experimental Demonstration of IFDMA for Uplink Visible Light Communication. IEEE Photonics Technol. Lett. 2016, 28, 2218–2220. [Google Scholar] [CrossRef]
- Chow, C.W.; Chen, C.Y.; Chen, S.H. Enhancement of Signal Performance in LED Visible Light Communications Using Mobile Phone Camera. IEEE Photonics J. 2015, 7, 1–17. [Google Scholar] [CrossRef]
- Liang, K.; Chow, C.W.; Liu, Y. RGB visible light communication using mobile phone camera and multi-input multi-output. Opt. Express 2016, 24, 9383–9388. [Google Scholar] [CrossRef] [PubMed]
- Hu, P.; Pathak, P.H.; Feng, X.; Fu, H.; Mohapatra, P. ColorBars: Increasing data rate of LED-to-camera communication using color shift keying. In Proceedings of the 11th ACM Conference on Emerging Networking Experiments and Technologies, Heidelberg, Germany, 1–4 December 2015; pp. 1–13. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| The focal length/mm | 4.25 |
| The resolution of the camera | 4032 × 2448 |
| The exposure time of the camera/ms | 0.1 |
| The ISO of the camera | 100 |
| The aperture of the camera | F1.7 |
| The diameter of the LED downlight/cm | 6 |
| The power of each LED/W | 9 |
| Current of each LED/mA | 85 |
| Voltage of each LED/V | 5 |
| LED-OFC ID | Encoding Sequence |
|---|---|
| 1 | 000001 |
| 2 | 000011 |
| 3 | 000101 |
| 4 | 001001 |
| 5 | 000111 |
| 6 | 001011 |
| 7 | 010101 |
| 8 | 001111 |
| 9 | 010111 |
| 10 | 011011 |
| 11 | 011111 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guan, W.; Li, J.; Wen, S.; Zhang, X.; Ye, Y.; Zheng, J.; Jiang, J. The Detection and Recognition of RGB-LED-ID Based on Visible Light Communication using Convolutional Neural Network. Appl. Sci. 2019, 9, 1400. https://doi.org/10.3390/app9071400
Guan W, Li J, Wen S, Zhang X, Ye Y, Zheng J, Jiang J. The Detection and Recognition of RGB-LED-ID Based on Visible Light Communication using Convolutional Neural Network. Applied Sciences. 2019; 9(7):1400. https://doi.org/10.3390/app9071400
Chicago/Turabian StyleGuan, Weipeng, Jingyi Li, Shangsheng Wen, Xinjie Zhang, Yufeng Ye, Jieheng Zheng, and Jiajia Jiang. 2019. "The Detection and Recognition of RGB-LED-ID Based on Visible Light Communication using Convolutional Neural Network" Applied Sciences 9, no. 7: 1400. https://doi.org/10.3390/app9071400
APA StyleGuan, W., Li, J., Wen, S., Zhang, X., Ye, Y., Zheng, J., & Jiang, J. (2019). The Detection and Recognition of RGB-LED-ID Based on Visible Light Communication using Convolutional Neural Network. Applied Sciences, 9(7), 1400. https://doi.org/10.3390/app9071400