A Comparative Study on Application of Unmanned Aerial Vehicle Systems in Agriculture



Abstract
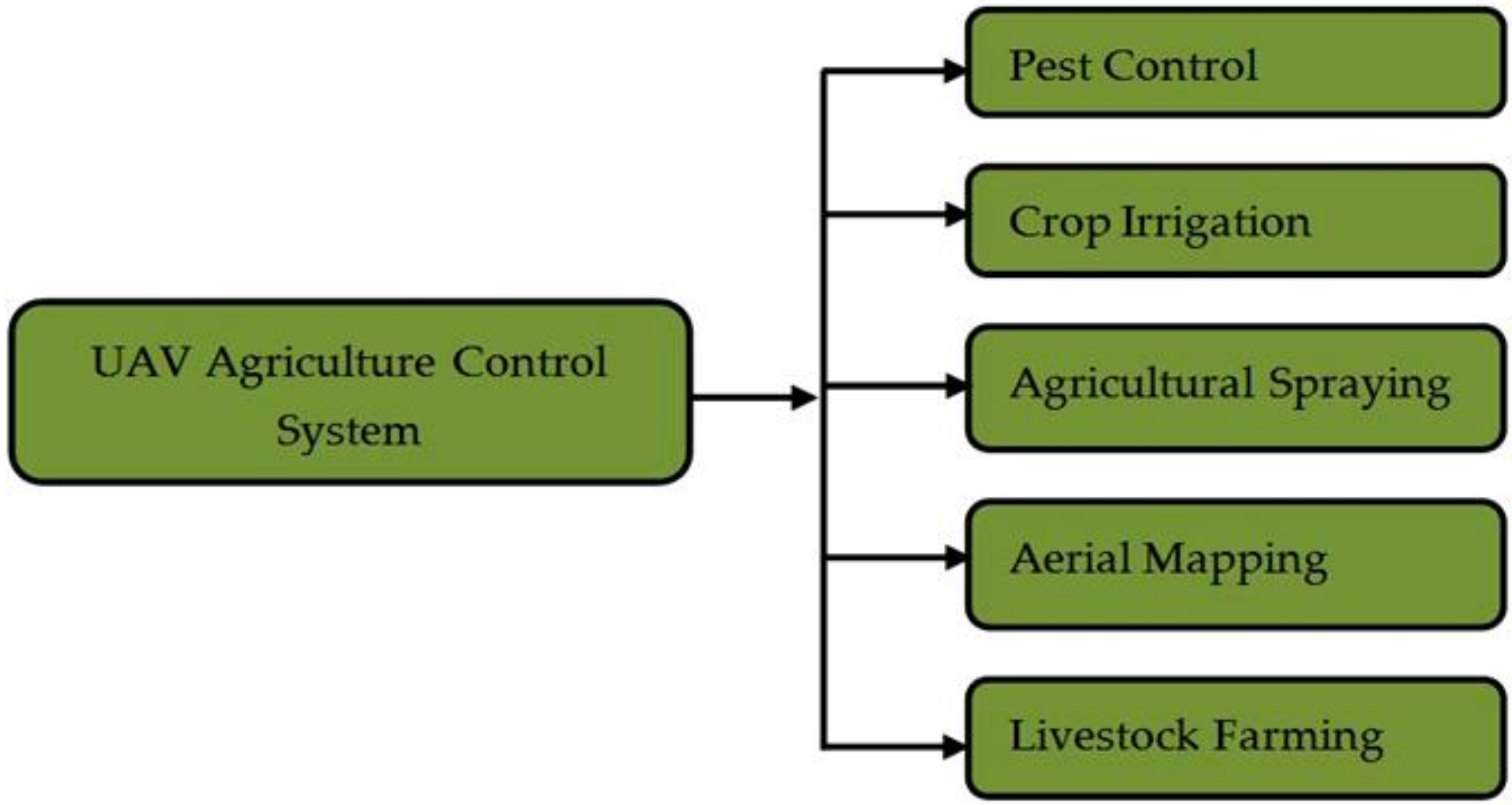
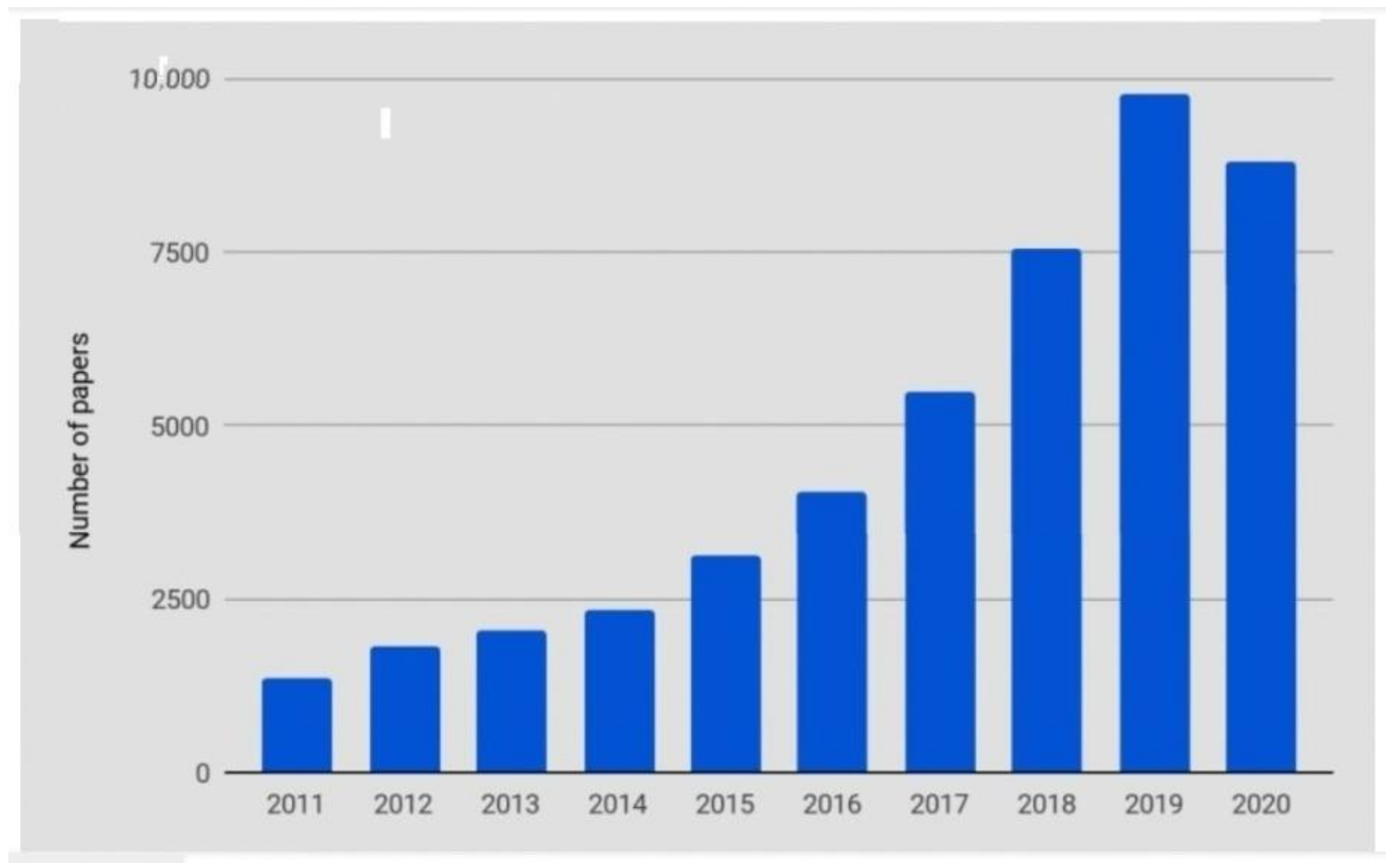
:1. Introduction and Overview
2. Methods and Materials
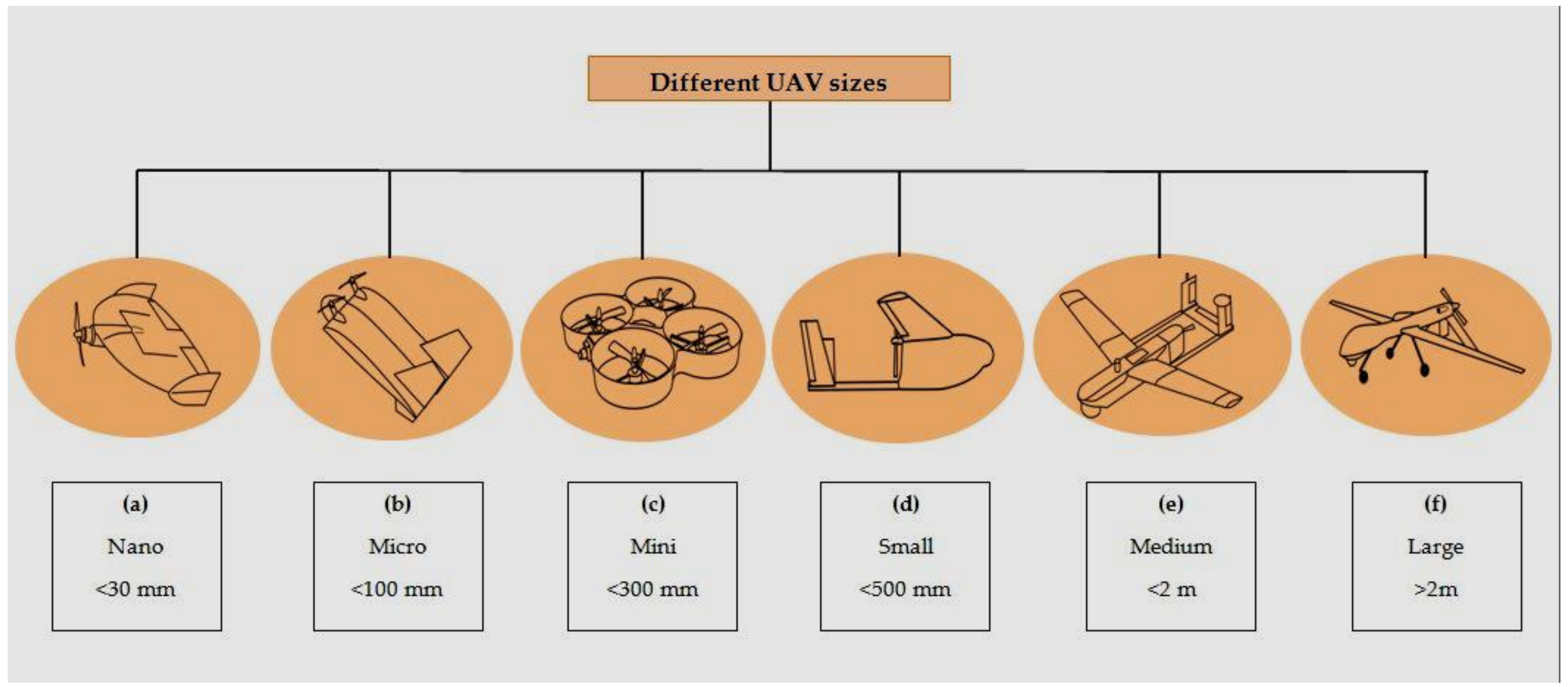
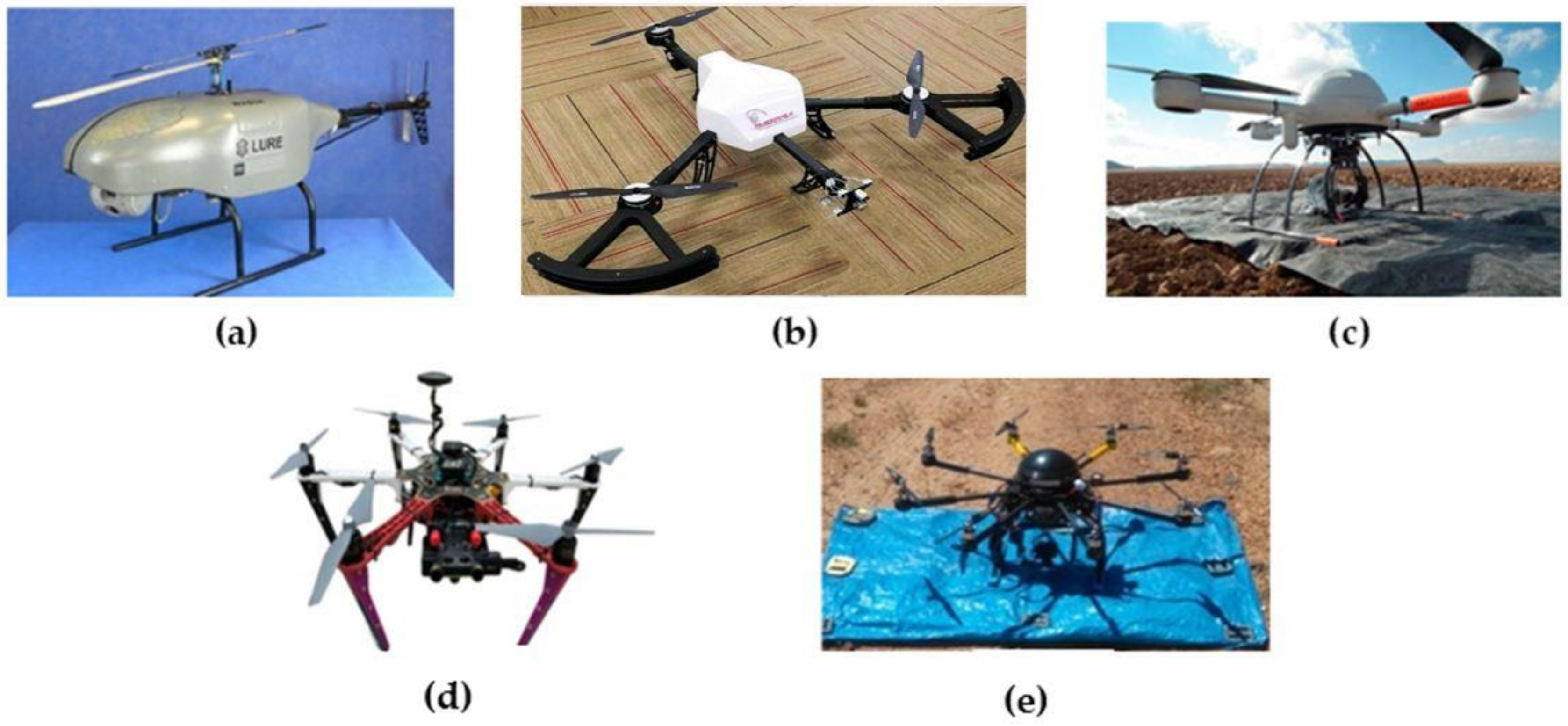
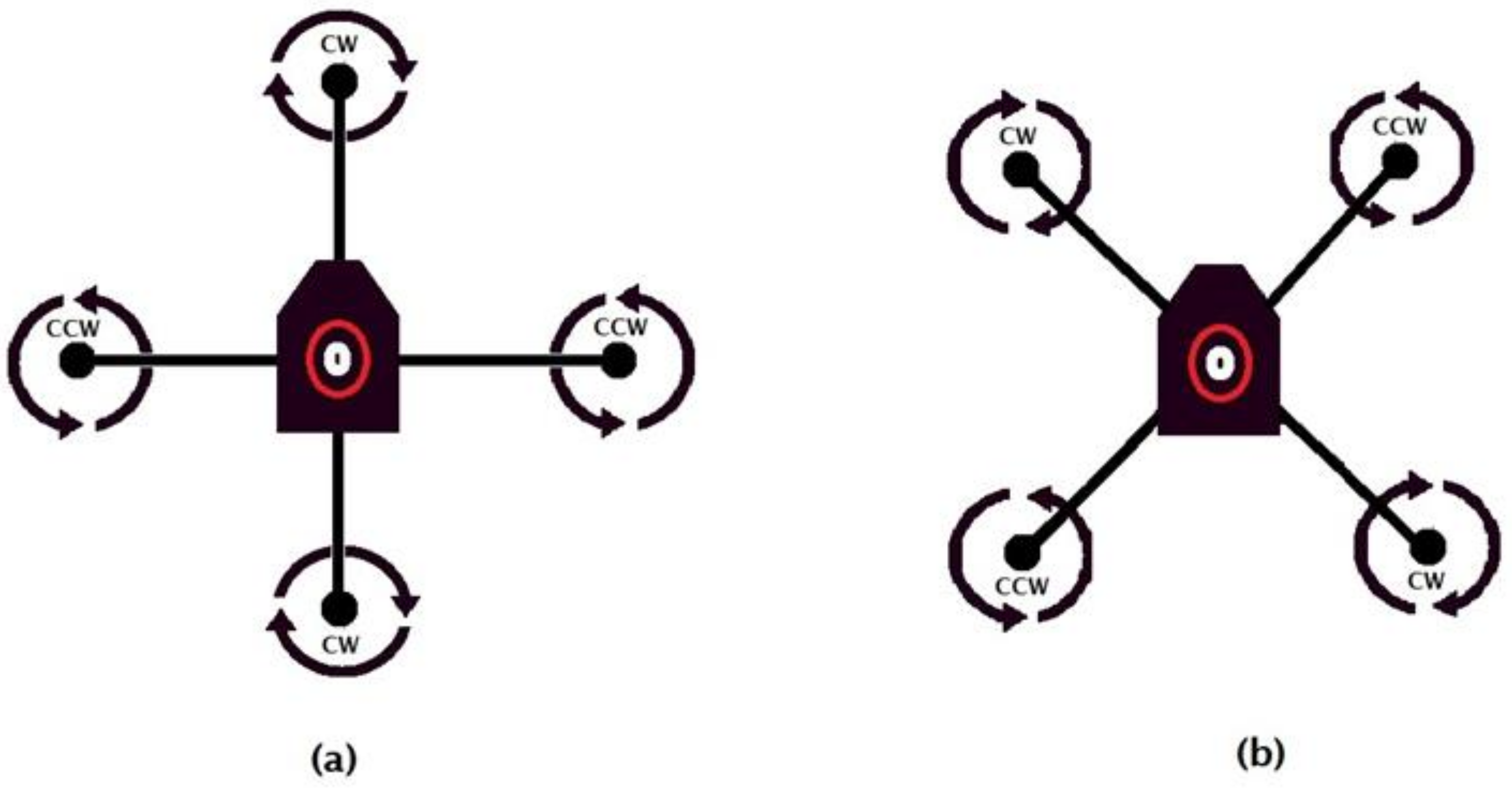
2.1. Classifications of Unmanned Aerial Vehicle
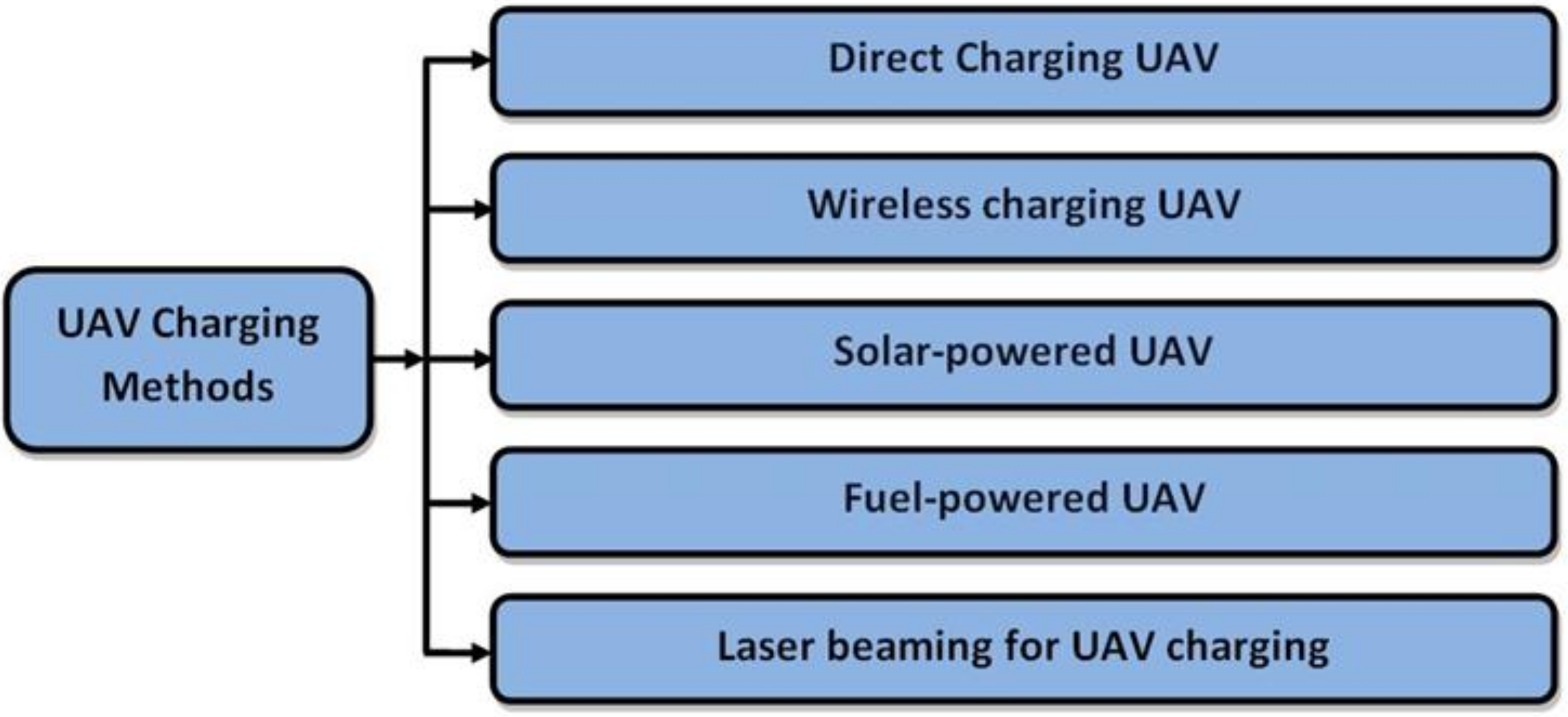
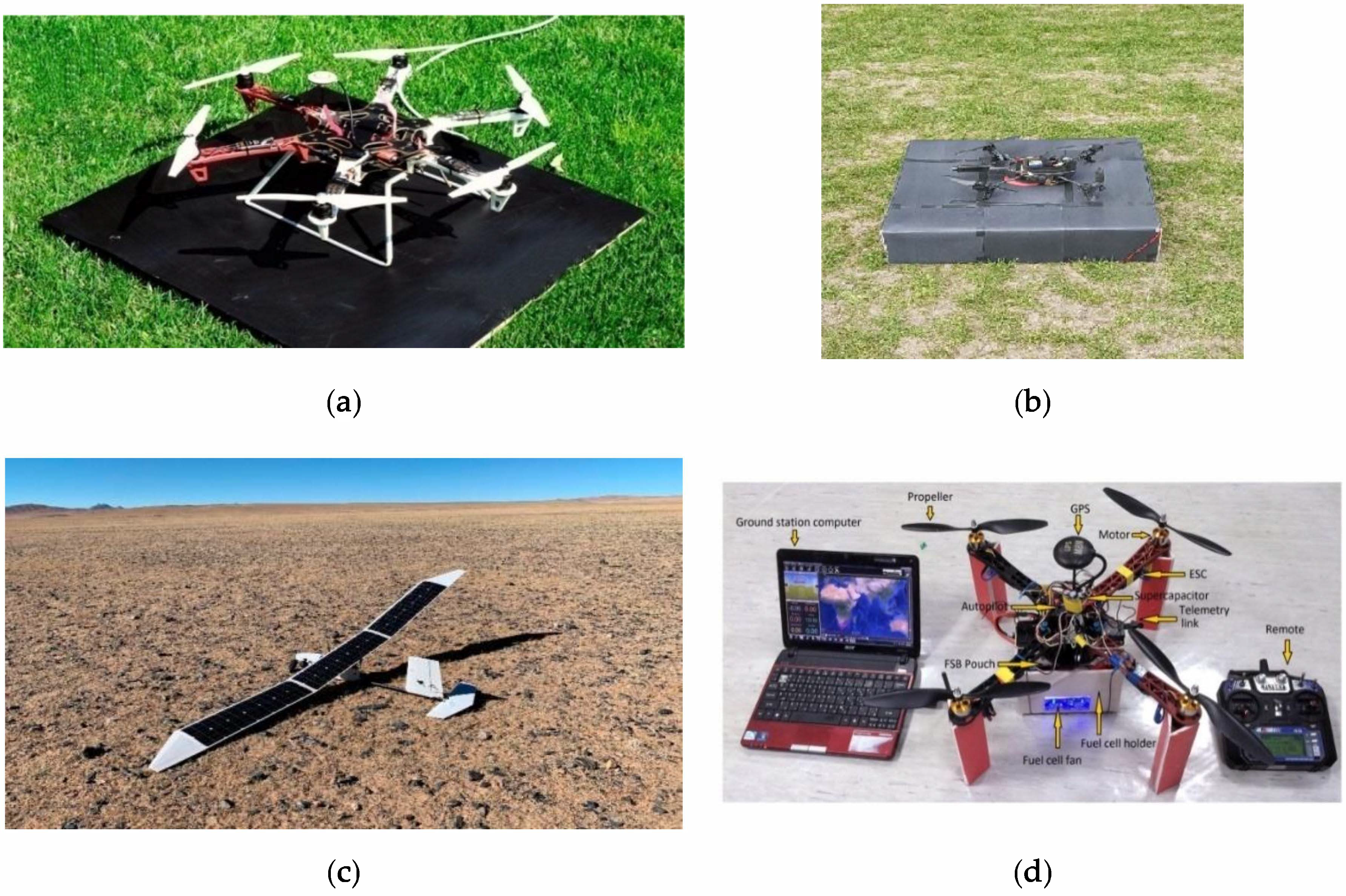
2.2. Unmanned Aerial Vehicle charging
2.3. Methodology
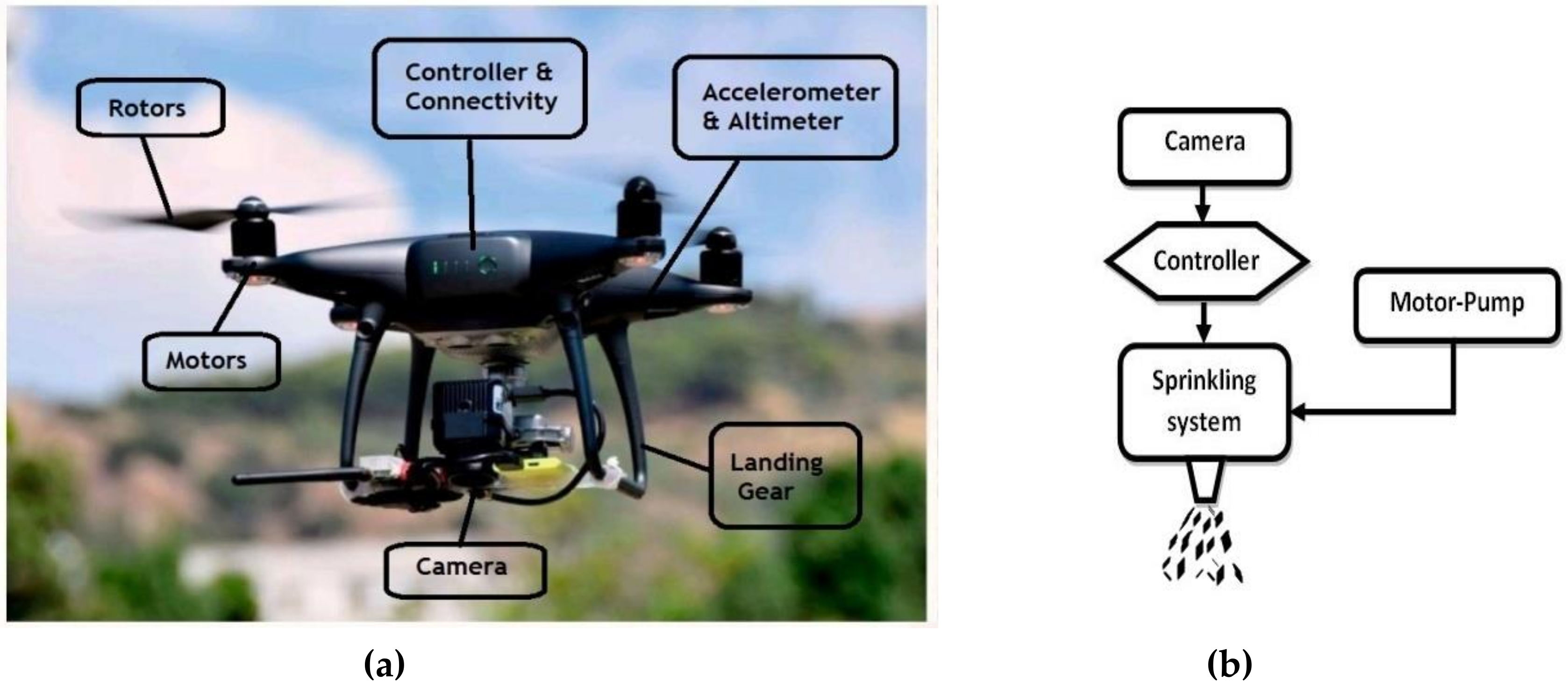
- Camera: UAV camera or imaging system is applied precisely in UAV applications to collect visual images, where certain elements may also be in motion [36]. It may consolidate modern RGB cameras, thermal cameras, IR cameras, etc. The coherence of the camera is to search and rescue methodically or to monitor. Furthermore, the camera is a fundamental tool for crop monitoring. For various operations, different kinds of cameras are required. Basically, the application of images captured with a UAV in agriculture requires a differentiated workflow, such as Photogrammetric aspects and the Estimation of variables related to agronomic aspects, for which more complex analysis is required.
- Landing Gears: Landing gears are indispensable parts of the safer landing. A UAV landing gear works in tacitly supporting the ideal weight of the whole aircraft. It also assists in rolling chassis and shock consumption throughout landing or takeoff, and appreciably reduces the impact pressures conveyed to the airframe. Besides, it prevents the UAV from being thrown off the deck. It’s recently getting utilized for UAV wireless charging, and the method is to recharge a UAV battery by making electrical connections on the UAV landing gear and the landing place [80].
- Motors: An efficient motor’s primary responsibility is to typically rotate the propellers of multirotor UAVs to operate them to fly. UAV demands thrust to fly in the atmosphere and to make the UAV perform, robust, and small motors are required. Furthermore, the most reliable mechanism which can be applied universally is BLDC (Brushless Direct Current) motors. BLDC Motors are the potential source of flight power during the operation of UAVs [81]. The motors are accurately controlled by an ESC (Electronic Speed Controller), which is employed to drive the propellers [24]. Especially, ESC is a miniature device, and it can rightly interpret the pilot’s explicit instructions, which professionally manages the motors to regulate the movements properly.
- Rotors: Rotors are the principal key for sufficient momentum, thrust, and complete control of a UAV. Genuinely, Rotors enable possible modifications of its pitch angle, yaw rate and also make alterations in the motor accelerators to properly handle the roll and vertical velocity [33]. It efficiently converts motion into velocity and seamlessly allows the UAV to balance accurately. The extended surface region of the rotors naturally generates fiction and supports UAVs drifting sidewise also. Rotors have a various number of blades and twist angles for different operations.
- Accelerometer and Altimeter: Accelerometers are active devices combined with gyroscopes and magnetometers that measure acceleration and implement the expedition force, in which the UAV is subjected to all three axes [82]. It is additionally a necessary sensor for a UAV because it conveniently provides crucial inputs in a stationary point and accurately determines the UAV’s position and adjustment. Moreover, an altimeter is efficiently utilized for altitude measurement by calculating the specific location’s air pressure [83]. The exact altitude information is vital for the navigation parameter.
- Controller and Connectivity: According to the UAV’s smooth lead and control, the centralized UAV state must be accessible to the controller at a reasonable bandwidth. UAVs can be remotely controlled or flown autonomously, and it wholly relies on appropriate distance, data terminal, and complex topography. The controlling system on top adequately fulfills a requisite role in the UAV sprinkling system, prominently shown in (Figure 9b). GPS and battery are two crucial portions of the connectivity orderliness [2]. UAV navigation and air traffic management are two principal responsibilities for the UAV connectivity system.

2.4. Hardware and Software Elements
3. Crop Monitoring
- Blue (0.44–0.51 µm) wavelength (BLUE),
- Green (0.52–0.59 µm) wavelength (GREEN),
- Red (0.63–0.68 µm) wavelength (RED),
- Red-edge (0.69–0.73 µm) wavelength and
- Near-infrared (0.76–0.85 µm) wavelength (NIR).
4. Spraying System
- Prescription-map interpretation system and sprinkling controller;
- Medicine case;
- Hall-flow sensor;
- Miniature diaphragm pump;
- Pressure nozzle.
- UAV based fertilizer and pesticide sprinkling efficiency are advantageous.
- Sprayer UAV reduces the usage of fertilizer and pesticides on the farm by a considerable amount.
- The UAVs can be autonomous and spray more smoothly.
- Environmental pollution can be handled adequately.
- UAV typically limits human contact with hazardous chemicals or noxious gases.
- A more limited number of qualified workforce or labor is required.
- The UAV sprinkling system saves valuable time for the producers and improves safety tremendously.
- Subject to the field, the UAV based spraying system assists appreciably reduce expenses.
| Algorithm 1. The UAV spraying system |
|
1. Start. 2. Input Commands. 3. If Lack of fluid, a. Sprinkle fluid. b. Input Controls. 4. Otherwise, a. Light the indicator. b. Input Controls. 5. Stop. |
5. Livestock Farming
- -
- Merely employing this technology is relatively costly.
- -
- Producers frantically need extensive Hardware and Software knowledge, experience, and skills.
- -
- The logistics are incredibly complicated, and time commitment is virtually required.
- -
- Severe weather conditions are capable of advent data eruption.
- -
- UAV components’ Repairs and replacements are needed frequently.
- -
- Personal privacy attack remains a substantial concern for the producers.
6. Conclusions and Future Scope
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| Acronym/Symbol | Description |
| GDP | Gross Domestic Product |
| UAV | Unmanned Aerial Vehicles |
| UAS | Unmanned Aircraft System |
| UWB | Ultra-wideband |
| VTOL | Vertical Take-off Landing |
| MPC | Model Predictive Controller |
| DF | Detection of Failures |
| RGB | Red, Green and Blue |
| DC | Direct Current |
| mAhs | Milliampere Hours |
| USB | Universal Serial Bus |
| PPMS | Photovoltaic Power Management System |
| HD | High-definition |
| IR | Infrared |
| BLDC | Brushless Direct Current |
| ESC | Electronic Speed Controller |
| GPS | Global Positioning System |
| UAV-CR | Unmanned Aerial Vehicles—Close Range |
| UAV-SR | Unmanned Aerial Vehicles—Short Range |
| UAV-E | Unmanned Aerial Vehicles—Endurance |
| QGIS | Quantum Geographic Information System |
| GIS | Geographic Information System |
| WSN | Wireless Sensor Network |
| MAVLink | Micro Air Vehicle Link |
| NDVI | Normalized Difference Vegetation index |
| GNDVI | Green Normalized Difference Vegetation Index |
| 3-D | Three-dimensional |
| COVID-19 | Coronavirus disease outbreak 2019 |
References
- Kim, J.; Kim, S.; Ju, C.; Son, H.I. Unmanned Aerial Vehicles in Agriculture: A Review of Perspective of Platform, Control, and Applications. IEEE Access 2019, 7, 105100–105115. [Google Scholar] [CrossRef]
- Popescu, D.; Stoican, F.; Stamatescu, G.; Ichim, L.; Dragana, C. Advanced UAV–WSN System for Intelligent Monitoring in Precision Agriculture. Sensors 2020, 20, 817. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Giordan, D.; Adams, M.S.; Aicardi, I.; Alicandro, M.; Allasia, P.; Baldo, M.; De Berardinis, P.; Dominici, D.; Godone, D.; Hobbs, P.; et al. The use of unmanned aerial vehicles (UAVs) for engineering geology applications. Bull. Int. Assoc. Eng. Geol. 2020, 79, 3437–3481. [Google Scholar] [CrossRef] [Green Version]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Zavatta, G.; Perrone, T.; Figus, C. Agriculture Remains Central to The World Economy. 60% of the Population Depends on Agriculture for Survival. 2020. Available online: http://www.expo2015.org/magazine/en/economy/agriculture-remains-central-to-the-world-economy.html (accessed on 8 August 2020).
- Spoorthi, S.B.; Shadaksharappa, S.S.; Manasa, V.K. Freyr drone: Pesticide/fertilizers spraying drone—An agricultural approach. In Proceedings of the 2nd International Conference on Computing and Communications Technologies (ICCCT), Chennai, India, 23–24 February 2017; pp. 252–255. [Google Scholar]
- Shilin, W.; Jianli, S.; Xiongkui, H.; Le, S.; Xiaonan, W.C.W.; Zhichong, W.; Yun, L.; Changling, W. Performances evaluation of four typical unmanned aerial vehicles used for pesticide application in China. Int. J. Agric. Biol. Eng. 2017, 10, 22–31. [Google Scholar] [CrossRef] [Green Version]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef] [Green Version]
- Fernández-Guisuraga, J.M.; Sanz-Ablanedo, E.; Suárez-Seoane, S.; Calvo, L. Using Unmanned Aerial Vehicles in Postfire Vegetation Survey Campaigns through Large and Heterogeneous Areas: Opportunities and Challenges. Sensors 2018, 18, 586. [Google Scholar] [CrossRef] [Green Version]
- Hartanto, R.; Arkeman, Y.; Hermadi, I.; Sjaf, S.; Kleinke, M. Intelligent Unmanned Aerial Vehicle for Agriculture and Agroindustry. IOP Conf. Ser. Earth Environ. Sci. 2019, 335, 012001. [Google Scholar] [CrossRef]
- Visconti, P.; De Fazio, R.; Velázquez, R.; Del-Valle-Soto, C.; Giannoccaro, N.I. Development of Sensors-Based Agri-Food Traceability System Remotely Managed by A Software Platform for Optimized Farm Management. Sensors 2020, 20, 3632. [Google Scholar] [CrossRef]
- Chirico, G.B.; Bonavolonta, F. Metrology for Agriculture and Forestry 2019. Sensors 2020, 20, 3498. [Google Scholar] [CrossRef]
- Wang, L.; Lan, Y.; Zhang, Y.; Zhang, H.; Tahir, M.N.; Ou, S.; Liu, X.; Chen, P. Applications and Prospects of Agricultural Unmanned Aerial Vehicle Obstacle Avoidance Technology in China. Sensors 2019, 19, 642. [Google Scholar] [CrossRef] [Green Version]
- Chen, P.-C.; Chiang, Y.; Weng, P.-Y. Imaging Using Unmanned Aerial Vehicles for Agriculture Land Use Classification. Agriculture 2020, 10, 416. [Google Scholar] [CrossRef]
- Fahlstrom, P.G.; Gleason, T.J. (Eds.) Introduction to UAV Systems, 4th ed.; John Wiley & Sons, Ltd.: West Sussex, UK, 2012; Chapter 2; pp. 17–31. [Google Scholar]
- Shi, Z.; Li, H.; Lin, H.; Huang, L. A Nano-Quadcopter Formation Flight System Based on UWB Indoor Positioning Technology. In Proceedings of the 13th International Conference on Computer Science & Education (ICCSE), Colombo, Sri Lanka, 8–11 August 2018; pp. 1–4. [Google Scholar]
- Zhang, W.; Li, G.; Baker, C. Dictionary Learning for Radar Classification of Multiple Micro-Drones. In Proceedings of the 2019 International Radar Conference (RADAR), Toulon, France, 23–27 September 2019; pp. 1–4. [Google Scholar]
- Mammarella, M.; Capello, E.; Dabbene, F.; Guglieri, G. Sample-Based SMPC for Tracking Control of Fixed-Wing UAV. IEEE Control. Syst. Lett. 2018, 2, 611–616. [Google Scholar] [CrossRef]
- Zhang, N.; Zhou, X.; Zhang, J.; Huang, L.; Zhao, J. Developing a small UAV platform to detect sheath blight of rice. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 3190–3193. [Google Scholar]
- Kurukularachchi, P.L.; Munasinghe, S.; De Silva, H. Stability analysis for a twin boom H- tail Medium Scale UAV through simulated dynamic model. In Proceedings of the 2016 Moratuwa Engineering Research Conference (MERCon), Moratuwa, Sri Lanka, 5–6 April 2016; pp. 415–420. [Google Scholar]
- Yi, W.; Liming, C.; LingYu, K.; Jie, Z.; Miao, W. Research on application mode of large fixed-wing UAV system on overhead transmission line. In Proceedings of the IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 27–29 October 2017; pp. 88–91. [Google Scholar]
- Czyba, R.; Lemanowicz, M.; Gorol, Z.; Kudala, T. Construction Prototyping, Flight Dynamics Modeling, and Aerodynamic Analysis of Hybrid VTOL Unmanned Aircraft. J. Adv. Transp. 2018, 2018, 1–15. [Google Scholar] [CrossRef]
- Pfeifer, C.; Barbosa, A.; Mustafa, O.; Peter, H.-U.; Brenning, A.; Rümmler, M. Using Fixed-Wing UAV for Detecting and Mapping the Distribution and Abundance of Penguins on the South Shetlands Islands, Antarctica. Drones 2019, 3, 39. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Zhou, W.; Sun, J.; Wen, C.-Y.; Chen, C.-K. Development of Model Predictive Controller for a Tail-Sitter VTOL UAV in Hover Flight. Sensors 2018, 18, 2859. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, X.; Shao, Q.; Li, Y.; Wang, Y.; Song, Q.; Liu, J.; Fan, J.; Yang, F. Application of UAV Remote Sensing for a Population Census of Large Wild Herbivores—Taking the Headwater Region of the Yellow River as an Example. Remote Sens. 2018, 10, 1041. [Google Scholar] [CrossRef] [Green Version]
- Olejnik, A.; Kiszkowiak, Ł.; Rogólski, R.; Chmaj, G.; Radomski, M.; Majcher, M.; Łukasz, O. The Use of Unmanned Aerial Vehicles in Remote Sensing Systems. Sensors 2020, 20, 2003. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- McArthur, D.R.; Chowdhury, A.B.; Cappelleri, D.J. Design of the I-BoomCopter UAV for environmental interaction. In Proceedings of the International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5209–5214. [Google Scholar]
- Gomes, K.R.; Hernandez-Lopez, D.; Ortega, J.; Ballesteros, R.; Poblete, T.; Moreno, M.Á. Uncooled Thermal Camera Calibration and Optimization of the Photogrammetry Process for UAV Applications in Agriculture. Sensors 2017, 17, 2173. [Google Scholar] [CrossRef]
- Kim, D.-H.; Go, Y.-G.; Choi, S.-M. An Aerial Mixed-Reality Environment for First-Person-View Drone Flying. Appl. Sci. 2020, 10, 5436. [Google Scholar] [CrossRef]
- Mattar, R.A.; Kalai, R. Development of a Wall-Sticking Drone for Non-Destructive Ultrasonic and Corrosion Testing. Drones 2018, 2, 8. [Google Scholar] [CrossRef] [Green Version]
- Sohail, S.; Nasim, S.; Khan, N.H. Modeling, controlling and stability of UAV Quad Copter. In Proceedings of the International Conference on Innovations in Electrical Engineering and Computational Technologies (ICIEECT), Karachi, Pakistan, 5–7 April 2017; pp. 1–8. [Google Scholar]
- Thu, K.M.; Gavrilov, A. Designing and Modeling of Quadcopter Control System Using L1 Adaptive Control. Procedia Comput. Sci. 2017, 103, 528–535. [Google Scholar] [CrossRef]
- Garcia-Nieto, S.; Velasco-Carrau, J.; Paredes-Valles, F.; Salcedo, J.V.; Fernandez, R.S. Motion Equations and Attitude Control in the Vertical Flight of a VTOL Bi-Rotor UAV. Electronics 2019, 8, 208. [Google Scholar] [CrossRef] [Green Version]
- Budiharto, W.; Chowanda, A.; Gunawan, A.A.S.; Irwansyah, E.; Suroso, J.S. A Review and Progress of Research on Autonomous Drone in Agriculture, Delivering Items and Geographical Information Systems (GIS). In Proceedings of the 2nd World Symposium on Communication Engineering (WSCE), Nagoya, Japan, 20–23 December 2019; pp. 205–209. [Google Scholar]
- Jeziorska, J. UAS for Wetland Mapping and Hydrological Modeling. Remote Sens. 2019, 11, 1997. [Google Scholar] [CrossRef] [Green Version]
- Tsouros, D.C.; Triantafyllou, A.; Bibi, S.; Sarigannidis, P.G. Data Acquisition and Analysis Methods in UAV based Applications for Precision Agriculture. In Proceedings of the 15th International Conference on Distributed Computing in Sensor Systems (DCOSS), Santorini Island, Greece, 29–31 May 2019; pp. 377–384. [Google Scholar]
- Oliveira, H.C.; Guizilini, V.C.; Nunes, I.P.; Souza, J.R. Failure Detection in Row Crops from UAV Images Using Morphological Operators. IEEE Geosci. Remote Sens. Lett. 2018, 15, 991–995. [Google Scholar] [CrossRef]
- Yamamoto, K.; Togami, T.; Yamaguchi, N. Super-Resolution of Plant Disease Images for the Acceleration of Image-based Phenotyping and Vigor Diagnosis in Agriculture. Sensors 2017, 17, 2557. [Google Scholar] [CrossRef] [Green Version]
- Stojcsics, D.; Domozi, Z.; Molnár, A. Automated evaluation of agricultural damage using UAV survey. Acta Univ. Sapientiae Agric. Environ. 2018, 10, 20–30. [Google Scholar] [CrossRef] [Green Version]
- Bassine, F.Z.; Errami, A.; Khaldoun, M. Real Time Video Processing using RGB Remote Sensing by Drone. In Proceedings of the International Conference on Electronics, Control, Optimization and Computer Science (ICECOCS), Kenitra, Morocco, 5–6 December 2018; pp. 1–5. [Google Scholar]
- Hashimoto, N.; Saito, Y.; Maki, M.; Homma, K. Simulation of Reflectance and Vegetation Indices for Unmanned Aerial Vehicle (UAV) Monitoring of Paddy Fields. Remote Sens. 2019, 11, 2119. [Google Scholar] [CrossRef] [Green Version]
- Yanliang, Z.; Qi, L.; Wei, Z. Design and test of a six-rotor unmanned aerial vehicle (UAV) electrostatic spraying system for crop protection. Int. J. Agric. Biol. Eng. 2017, 10, 68–76. [Google Scholar] [CrossRef]
- Lou, Z.; Xin, F.; Han, X.; Lan, Y.; Duan, T.; Fu, W. Effect of Unmanned Aerial Vehicle Flight Height on Droplet Distribution, Drift and Control of Cotton Aphids and Spider Mites. Agronomy 2018, 8, 187. [Google Scholar] [CrossRef] [Green Version]
- Matese, A.; Di Gennaro, S.F. Practical applications of a multisensory UAV platform based on multispectral, thermal and rgb high resolution images in precision viticulture. Agriculture 2018, 8, 116. [Google Scholar] [CrossRef] [Green Version]
- Qin, W.; Xue, X.; Zhang, S.; Gu, W.; Wang, B. Droplet deposition and efficiency of fungicides sprayed with small UAV against wheat powdery mildew. Int. J. Agric. Biol. Eng. 2018, 11, 27–32. [Google Scholar] [CrossRef] [Green Version]
- Marinello, F.; Andrea, P.; Alessandro, C.; Luigi, S. Technical analysis of unmanned aerial vehicles (drones) for agricultural applications. Eng. Rural Dev. 2016, 15, 870–875. [Google Scholar]
- Poley, L.G.; McDermid, G. A Systematic Review of the Factors Influencing the Estimation of Vegetation Aboveground Biomass Using Unmanned Aerial Systems. Remote Sens. 2020, 12, 1052. [Google Scholar] [CrossRef] [Green Version]
- Messina, G.; Modica, G. Applications of UAV Thermal Imagery in Precision Agriculture: State of the Art and Future Research Outlook. Remote Sens. 2020, 12, 1491. [Google Scholar] [CrossRef]
- Ni, J.; Yao, L.; Zhang, J.; Cao, W.; Zhu, Y.; Tai, X. Development of an Unmanned Aerial Vehicle-Borne Crop-Growth Monitoring System. Sensors 2017, 17, 502. [Google Scholar] [CrossRef] [Green Version]
- Panday, U.S.; Pratihast, A.K.; Aryal, J.; Kayastha, R.B. A Review on Drone-Based Data Solutions for Cereal Crops. Drones 2020, 4, 41. [Google Scholar] [CrossRef]
- Wen, S.; Zhang, Q.; Deng, J.; Lan, Y.; Yin, X.; Shan, J. Design and Experiment of a Variable Spray System for Unmanned Aerial Vehicles Based on PID and PWM Control. Appl. Sci. 2018, 8, 2482. [Google Scholar] [CrossRef] [Green Version]
- Ayhan, B.; Kwan, C.; Budavari, B.; Kwan, L.; Lu, Y.; Perez, D.; Li, J.; Skarlatos, D.; Vlachos, M. Vegetation Detection Using Deep Learning and Conventional Methods. Remote Sens. 2020, 12, 2502. [Google Scholar] [CrossRef]
- Raeva, P.L.; Šedina, J.; Dlesk, A. Monitoring of crop fields using multispectral and thermal imagery from UAV. Eur. J. Remote Sens. 2019, 52, 192–201. [Google Scholar] [CrossRef] [Green Version]
- Nhamo, L.; Magidi, J.; Nyamugama, A.; Clulow, A.D.; Sibanda, M.; Chimonyo, V.G.P.; Mabhaudhi, T. Prospects of Improving Agricultural and Water Productivity through Unmanned Aerial Vehicles. Agriculture 2020, 10, 256. [Google Scholar] [CrossRef]
- Yallappa, D.; Veerangouda, M.; Maski, D.; Palled, V.; Bheemanna, M. Development and evaluation of drone mounted sprayer for pesticide applications to crops. In Proceedings of theIEEE Global Humanitarian Technology Conference (GHTC), San Jose, CA, USA, 19–22 October 2017; pp. 1–7. [Google Scholar]
- Chebrolu, N.; Labe, T.; Stachniss, C. Robust Long-Term Registration of UAV Images of Crop Fields for Precision Agriculture. IEEE Robot. Autom. Lett. 2018, 3, 3097–3104. [Google Scholar] [CrossRef]
- Hentschke, M.; Pignaton, E.; Hennig, C.H.; Da Veiga, I.C.G.; Da Veiga, I.G. Evaluation of Altitude Sensors for a Crop Spraying Drone. Drones 2018, 2, 25. [Google Scholar] [CrossRef] [Green Version]
- Chen, P.; Lan, Y.; Huang, X.; Qi, H.; Wang, G.; Wang, J.; Wang, L.; Xiao, H. Droplet Deposition and Control of Planthoppers of Different Nozzles in Two-Stage Rice with a Quadrotor Unmanned Aerial Vehicle. Agronomy 2020, 10, 303. [Google Scholar] [CrossRef] [Green Version]
- Agapiou, A. Vegetation Extraction Using Visible-Bands from Openly Licensed Unmanned Aerial Vehicle Imagery. Drones 2020, 4, 27. [Google Scholar] [CrossRef]
- García-Martínez, H.; Flores, H.; Ascencio-Hernández, R.; Khalil-Gardezi, A.; Tijerina-Chávez, L.; Mancilla-Villa, O.R.; Vázquez-Peña, M.A. Corn Grain Yield Estimation from Vegetation Indices, Canopy Cover, Plant Density, and a Neural Network Using Multispectral and RGB Images Acquired with Unmanned Aerial Vehicles. Agriculture 2020, 10, 277. [Google Scholar] [CrossRef]
- Manfreda, S.; McCabe, M.F.; Miller, P.E.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben-Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the Use of Unmanned Aerial Systems for Environmental Monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef] [Green Version]
- Gao, P.; Zhang, Y.; Zhang, L.; Noguchi, R.; Ahamed, T. Development of a Recognition System for Spraying Areas from Unmanned Aerial Vehicles Using a Machine Learning Approach. Sensors 2019, 19, 313. [Google Scholar] [CrossRef] [Green Version]
- Gao, D.; Sun, Q.; Hu, B.; Zhang, S. A Framework for Agricultural Pest and Disease Monitoring Based on Internet-of-Things and Unmanned Aerial Vehicles. Sensors 2020, 20, 1487. [Google Scholar] [CrossRef] [Green Version]
- Basso, M.; Stocchero, D.; Henriques, R.V.B.; Vian, A.L.; Bredemeier, C.; Konzen, A.A.; Pignaton, E. Proposal for an Embedded System Architecture Using a GNDVI Algorithm to Support UAV-Based Agrochemical Spraying. Sensors 2019, 19, 5397. [Google Scholar] [CrossRef] [Green Version]
- Guo, Y.; Guo, J.; Liu, C.; Xiong, H.; Chai, L.; He, D. Precision Landing Test and Simulation of the Agricultural UAV on Apron. Sensors 2020, 20, 3369. [Google Scholar] [CrossRef] [PubMed]
- Singh, K.K.; Frazier, A. A meta-analysis and review of unmanned aircraft system (UAS) imagery for terrestrial applications. Int. J. Remote Sens. 2018, 39, 5078–5098. [Google Scholar] [CrossRef]
- Costea, I.M.; Plesca, V. Automatic battery charging system for electric powered drones. In Proceedings of the IEEE 24th International Symposium for Design and Technology in Electronic Packaging (SIITME), Iaşi, Romania, 25–28 October 2018; pp. 377–381. [Google Scholar]
- Flynt, J. How Long Can A Drone Fly? Long Duration Drones—3D Insider. 3D Insider. 2020. Available online: https://3dinsider.com/how-long-can-drones-fly/#:~:text=An%20average%20drone%20will%20only,have%20the%20best%20battery%20life (accessed on 13 August 2020).
- Amarasinghe, A.; Wijesuriya, V.B.; Ganepola, D.; Jayaratne, L. A swarm of crop spraying drones solution for optimising safe pesticide usage in arable lands. In Proceedings of the 17th Conference on Embedded Networked Sensor Systems, New York, NY, USA, 10–13 November 2019; pp. 410–411. [Google Scholar]
- Rohan, A.; Rabah, M.; Talha, M.; Kim, S.H. Development of Intelligent Drone Battery Charging System Based on Wireless Power Transmission Using Hill Climbing Algorithm. Appl. Syst. Innov. 2018, 1, 44. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.J.; Lim, G.J. A Hybrid Battery Charging Approach for Drone-Aided Border Surveillance Scheduling. Drones 2018, 2, 38. [Google Scholar] [CrossRef] [Green Version]
- Campi, T.; Cruciani, S.; Feliziani, M. Wireless Power Transfer Technology Applied to an Autonomous Electric UAV with a Small Secondary Coil. Energies 2018, 11, 352. [Google Scholar] [CrossRef] [Green Version]
- Campi, T.; Cruciani, S.; Maradei, F.; Campi, T. Innovative Design of Drone Landing Gear Used as a Receiving Coil in Wireless Charging Application. Energies 2019, 12, 3483. [Google Scholar] [CrossRef] [Green Version]
- Bin Junaid, A.; Konoiko, A.; Zweiri, Y.; Sahinkaya, M.N.; Seneviratne, L.D. Autonomous Wireless Self-Charging for Multi-Rotor Unmanned Aerial Vehicles. Energies 2017, 10, 803. [Google Scholar] [CrossRef]
- Jung, S.; Jo, Y.; Kim, Y.-J. Flight Time Estimation for Continuous Surveillance Missions Using a Multirotor UAV. Energies 2019, 12, 867. [Google Scholar] [CrossRef] [Green Version]
- Guo, A.; Zhou, Z.; Zhu, X.; Bai, F. Low-Cost Sensors State Estimation Algorithm for a Small Hand-Launched Solar-Powered UAV. Sensors 2019, 19, 4627. [Google Scholar] [CrossRef] [Green Version]
- Alsafasfeh, M.; Abdel-Qader, I.; Bazuin, B.; Alsafasfeh, Q.; Su, W. Unsupervised Fault Detection and Analysis for Large Photovoltaic Systems Using Drones and Machine Vision. Energies 2018, 11, 2252. [Google Scholar]
- Mukhopadhyay, S.; Fernandes, S.; Shihab, M.; Waleed, D.; Awal, M.S. Using Small Capacity Fuel Cells Onboard Drones for Battery Cooling: An Experimental Study. Appl. Sci. 2018, 8, 942. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.J.; Lim, N.; Choi, W.; Lee, Y.; Baek, J.; Park, J.; Lee, S.J.; Lim, N.; Choi, W.; Lee, Y.; et al. Study on Battery Charging Converter for MPPT Control of Laser Wireless Power Transmission System. Electronics 2020, 9, 1745. [Google Scholar] [CrossRef]
- Galimov, M.; Fedorenko, R.; Klimchik, A. UAV Positioning Mechanisms in Landing Stations: Classification and Engineering Design Review. Sensors 2020, 20, 3648. [Google Scholar] [CrossRef] [PubMed]
- Xiaohong, W.; Wenhui, F.; Xinjun, L.; Lizhi, W. Weak Degradation Characteristics Analysis of UAV Motors Based on Laplacian Eigenmaps and Variational Mode Decomposition. Sensors 2019, 19, 524. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sensors and Connectivity in Drones | Electronics for You. 2020. Available online: https://www.electronicsforu.com/technology-trends/sensors-connectivity-drones (accessed on 14 August 2020).
- Rohi, G.; Ejofodomi, O.; Ofualagba, G. Autonomous monitoring, analysis, and countering of air pollution using environmental drones. Heliyon 2020, 6, e03252. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Brief, L. Growth Opportunity in Global UAV Market; Las Colinas: Irving, TX, USA, 2011. [Google Scholar]
- Classification of the Unmanned Aerial Systems GEOG 892: Unmanned Aerial Systems. E-Education.Psu.Edu. 2020. Available online: https://www.e-education.psu.edu/geog892/node/5#:~:text=to%20model%20airplanes.-,Close%20range%20UAVs,for%20reconnaissance%20and%20surveillance%20tasks (accessed on 13 August 2020).
- Song, Q.; Shao, Q.; Yue, H. Surveying Wild Animals from Satellites, Manned Aircraft and Unmanned Aerial Systems (UASs): A Review. Remote Sens. 2019, 11, 1308. [Google Scholar]
- Gonzalez, F.; Montes, G.A.; Puig, E.; Johnson, S.; Mengersen, K.; Gaston, K.J. Unmanned Aerial Vehicles (UAVs) and Artificial Intelligence Revolutionizing Wildlife Monitoring and Conservation. Sensors 2016, 16, 97. [Google Scholar] [CrossRef] [Green Version]
- Rowe, E.; Dawkins, M.S.; Gebhardt-Henrich, S.G. A Systematic Review of Precision Livestock Farming in the Poultry Sector: Is Technology Focussed on Improving Bird Welfare? Animals 2019, 9, 614. [Google Scholar] [CrossRef] [Green Version]
- Srivastava, K.; Pandey, P.C.; Sharma, J.K. An Approach for Route Optimization in Applications of Precision Agriculture Using UAVs. Drones 2020, 4, 58. [Google Scholar] [CrossRef]
- Hinas, A.; Roberts, J.M.; Gonzalez, F. Vision-Based Target Finding and Inspection of a Ground Target Using a Multirotor UAV System. Sensors 2017, 17, 2929. [Google Scholar] [CrossRef] [Green Version]
- Yan, Y.; Shi, W.; Zhang, X. Design of UAV wireless power transmission system based on coupling coil structure optimization. EURASIP J. Wirel. Commun. Netw. 2020, 2020, 1–13. [Google Scholar] [CrossRef]
- Barbedo, J.; Koenigkan, L.; Santos, P.; Ribeiro, A.R.B. Counting Cattle in UAV Images—Dealing with Clustered Animals and Animal/Background Contrast Changes. Sensors 2020, 20, 2126. [Google Scholar]
- Mangewa, L.J.; Ndakidemi, P.; Munishi, L.K. Integrating UAV Technology in an Ecological Monitoring System for Community Wildlife Management Areas in Tanzania. Sustainability 2019, 11, 6116. [Google Scholar] [CrossRef] [Green Version]
- Stateras, D.; Kalivas, D. Assessment of Olive Tree Canopy Characteristics and Yield Forecast Model Using High Resolution UAV Imagery. Agriculture 2020, 10, 385. [Google Scholar] [CrossRef]
- Atoev, S.; Kwon, K.-R.; Lee, S.-H.; Moon, K.-S. Data analysis of the MAVLink communication protocol. In Proceedings of the International Conference on Information Science and Communications Technologies (ICISCT), Tashkent, Uzbekistan, 2–4 November 2017; pp. 1–3. [Google Scholar]
- Shafi, U.; Mumtaz, R.; García-Nieto, J.; Hassan, S.A.; Zaidi, S.A.R.; Iqbal, N.; Shafi, U.; Mumtaz, R.; García-Nieto, J.; Hassan, S.A.; et al. Precision Agriculture Techniques and Practices: From Considerations to Applications. Sensors 2019, 19, 3796. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Meivel, S.; Maheswari, S. Optimization of Agricultural Smart System using Remote Sensible NDVI and NIR Thermal Image Analysis Techniques. In Proceedings of the International Conference for Emerging Technology (INCET), Belgaum, India, 5–7 June 2020; pp. 1–10. [Google Scholar]
- Xin, F.; Zhao, J.; Zhou, Y.; Wang, G.; Han, X.; Fu, W.; Deng, J.; Lan, Y. Effects of Dosage and Spraying Volume on Cotton Defoliants Efficacy: A Case Study Based on Application of Unmanned Aerial Vehicles. Agronomy 2018, 8, 85. [Google Scholar] [CrossRef] [Green Version]
- Sarghini, F.; Visacki, V.; Sedlar, A.; Crimaldi, M.; Cristiano, V.; De Vivo, A. First measurements of spray deposition obtained from UAV spray application technique. In Proceedings of the IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor), Portici, Italy, 24–26 October 2019; pp. 58–61. [Google Scholar]
- Cahn, M.D.; Johnson, L.F. New Approaches to Irrigation Scheduling of Vegetables. Horticulturae 2017, 3, 28. [Google Scholar] [CrossRef] [Green Version]
- Sharma, L.K.; Bali, S.K. A Review of Methods to Improve Nitrogen Use Efficiency in Agriculture. Sustainability 2018, 10, 51. [Google Scholar] [CrossRef] [Green Version]
- Al-Thani, N.; Albuainain, A.; Alnaimi, F.; Zorba, N. Drones for Sheep Livestock Monitoring. In Proceedings of the IEEE 20th Mediterranean Electrotechnical Conference (MELECON), Palermo, Italy, 16–18 June 2020; pp. 672–676. [Google Scholar]
- Sarwar, F.; Griffin, A.; Periasamy, P.; Portas, K.; Law, J. Detecting and Counting Sheep with a Convolutional Neural Network. In Proceedings of the 15th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Auckland, New Zealand, 27–30 November 2018; pp. 1–6. [Google Scholar]
- Rahnemoonfar, M.; Dobbs, D.; Yari, M.; Starek, M.J. DisCountNet: Discriminating and Counting Network for Real-Time Counting and Localization of Sparse Objects in High-Resolution UAV Imagery. Remote Sens. 2019, 11, 1128. [Google Scholar] [CrossRef] [Green Version]
- Fu, Z.; Jiang, J.; Gao, Y.; Krienke, B.; Wang, M.; Zhong, K.; Cao, Q.; Tian, Y.; Zhu, Y.; Cao, W.; et al. Wheat Growth Monitoring and Yield Estimation based on Multi-Rotor Unmanned Aerial Vehicle. Remote Sens. 2020, 12, 508. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Author | UAV Type | Research Work | Year Published | Possible Future Agrarian Opportunity |
|---|---|---|---|---|---|
| 1. | Kim [1] | - | Analyzed the most advanced leaning and possible applications relevant to agrarian UAVs, control processes, facilities, and improvements. Plus, UAVs’ application in practical agricultural environments and the eventual development of the UAVs are presented. | 2019 | Crop monitoring and agricultural spraying |
| 2. | Popescu [2] | Quad-rotor | Proposed a hierarchic arrangement typically based on the effective co-operation among UAVs and WSNs (Wireless Sensor Network) for agricultural crop monitoring. | 2019 | Crop monitoring |
| 3. | Giordan [3] | - | Described the monitoring systems, standard procedures, and practical possibilities in various engineering geology objectives. | 2020 | Crop monitoring |
| 4. | Spoorthi [6] | Quadcopter | Developed a renovated UAV that comfortably carries pesticides to sprinkle all over the area and lessens producers’ stress. | 2017 | Agricultural spraying |
| 5. | Shilin [7] | 3 Single rotor UAVs and a six-rotor UAV | Described the enforcement evaluation of four typical UAVs applied for pesticide applications in China. | 2017 | Agricultural spraying |
| 6. | Tsouros [8] | - | Analyzed the modern applications of UAVs concerning precision agriculture. | 2019 | Crop monitoring and agricultural spraying |
| 7. | Fernández-Guisuraga [9] | Octocopter | Evaluated the possibilities and difficulties of utilizing UAVs to obtain multispectral ortho-mosaics at an ultra-high-resolution, which is beneficial for monitoring broad and various scorched areas. | 2018 | Crop monitoring |
| 8. | Hartanto [10] | - | Focused on the rational potential of utilizing a UAV for farming and agro-industry to increase economic productivity and diminishing the entire expenses proportionately. | 2019 | Crop monitoring and livestock farming |
| 9. | Chen [14] | Quadcopter and fixed-wing | Utilized a UAV to take high-resolution images of crop fields. And software-based image analysis was conducted to allocate areas. | 2020 | Crop monitoring |
| 10. | Fahlstrom [15] | - | Succinctly summarized the specific types and applications of UAS and provided a functional context for the system requirements that drive the design tradeoffs. | 2012 | Crop monitoring |
| 11. | Shi [16] | Nano-quadcopter | Designed and executed a nano quadcopter aviation system scientifically based on the UWB (Ultra-wideband) indoor positioning high tech. | 2018 | Livestock farming |
| 12. | Zhang [17] | Micro UAVs | A system for the disclosure and arrangement of multiple micro UAVs based on their micro-Doppler trademarks through dictionary learning is proposed. | 2019 | Livestock farming |
| 13. | Mammarella [18] | Fixed-wing | A direction and tracing control approach for UAV gyro-pilots is appropriately presented for multi-scenario mapping. | 2018 | Crop monitoring |
| 14. | Zhang [19] | Small UAV | Adequately developed a stable UAV platform to identify sheath blight in rice-fields. | 2017 | Crop monitoring |
| 15. | Kurukularachchi [20] | Medium UAV (Twin Boom H-tail) | Formed the extensive Stability analysis for a medium-scale UAV concerning various flying conditions. | 2016 | Crop monitoring |
| 16. | Yi [21] | Large Fixed-wing UAV | Employed a multi-dimensional approach to accurately analyzing the UAV system to exhibit its expediency in diverse application situations of overhead transmission lines. | 2017 | Crop monitoring |
| 17. | Czyba [22] | Hybrid VTOL (Vertical Take-off Landing) | Highlighted the design method of a UAV’s vertical takeoff and landing, along with realistically portraying the airframe manufacture, geometrical modeling, and aerodynamic analysis for appropriate fight techniques. | 2018 | Crop monitoring |
| 18. | Pfeifer [23] | Fixed-wing | Applied a battery-powered UAV to survey the penguin colonies on two different remote coasts. | 2019 | Livestock farming |
| 19. | Li [24] | VTOL UAV | Presented an MPC (Model Predictive Controller) for position control of vertical take-off and landing (VTOL) UAV in the hovering flight. | 2018 | Crop monitoring and livestock farming |
| 20. | Guo [25] | Fixed-wing | Utilized UAVs to accomplish an entire population census of massive wild herbivores in Maduo. | 2018 | Livestock farming |
| 21. | Olejnik [26] | Small Helicopter | Described the feasibility of utilizing a small helicopter to accomplish specific tasks by employing a remote sensing system. Besides, appropriately applied this system to observe the gas transmission and standard configuration of networks. | 2020 | Crop monitoring and livestock farming |
| 22. | McArthur [27] | Tricopter (I-BoomCopter) | Introduced the renovated design of a UAV specifically for environmental interactions. | 2017 | Crop monitoring and livestock farming |
| 23. | Ribeiro-Gomes [28] | Quad-rotor (Micro drone MD4-1000) | Utilized thermal camera analysis and possible escalation of the photogrammetric system for desired UAV operations in modern agriculture. | 2017 | Livestock farming |
| 24. | Kim [29] | Hexacopter | An aerial mixed reality condition for first-person view UAV soaring is meticulously planned to efficiently implement an exuberant experience and a secure setting for UAV users by building some extra pragmatic obstacles while operating a UAV in an open field. | 2020 | Crop monitoring |
| 25. | Mattar [30] | tri-rotor | Proposed a modern concept for the current limitations of utilizing a UAV in possible combination with a visual inspection system, and any contact-based method. | 2018 | Crop monitoring and livestock farming |
| 26. | Sohail[31] | Quadcopter | Designed, executed, and tested a stable UAV that can be universally employed for scrutiny and continuous monitoring of a vague area. | 2017 | Crop monitoring |
| 27. | Thu [32] | Quadcopter | Presented the modern design and innovative command system of a UAV utilizing the L1 adaptive control design method. The control guidelines are methodically defined soundly based on the act and tenacity metrics fixed by the designer. | 2016 | Crop monitoring and livestock farming |
| 28. | Garcia-Nieto [33] | VTOL Bi-Rotor UAV | Gathered the innovative idea and effective implementation of the control method that enables a UAV to operate a VTOL maneuver adopting two tilting rotors. | 2019 | Crop monitoring and livestock Farming |
| 29. | Budiharo [34] | Multi-rotor (quad-rotor) | Presented an outline of UAVs’ study and practical application for agriculture, delivering things, and GIS. And typically described pesticide spraying and field mapping. | 2019 | Crop monitoring and agricultural spraying |
| 30. | Jeziorska[35] | Fixed-wing and multi-rotor | Reviewed the operating system, enactment, scientific adaptability, and information processing methods, which are necessary for wetland monitoring and hydrological perspective. | 2019 | Crop monitoring |
| 31. | Tsouros[36] | - | Abstracted the data acquisition systems and technologies to collect accurate pictures in UAV based agriculture and highlighted the benefits and hindrances. | 2019 | Crop monitoring and livestock farming |
| 32. | Oliveira [37] | - | Presented an ideal technique for DF from aerial images, acquired by utilizing a UAV competent from assembling high-resolution RGB pictures for the failure apprehension in crops. | 2018 | Crop monitoring |
| 33. | Yamamoto [38] | - | Implemented a super-resolution technique to the low-resolution pictures of tomato diseases to retrieve complete data and administered disease classification. | 2017 | Crop monitoring |
| 34. | Stojcsics [39] | - | Employed the automated evaluation of agrarian damage by utilizing the UAV survey. | 2018 | Crop monitoring |
| 35. | Bassine [40] | - | Progressively developed a real-time technique that strongly distinguishes evergreens in perception and maps having data regarding trees’ well-being, branch thickness, and trees’ distribution. | 2018 | Crop monitoring |
| 36. | Hashimoto [41] | - | Highlighted the accurate simulation of reflectively and vegetation indices for the paddy fields | 2019 | Crop monitoring |
| 37. | Yanliang [42] | Six-rotor UAV | Uniquely designed and experimented with a multi-rotor UAV electrostatic sprinkling system for crop safety. | 2017 | Agricultural spraying |
| 38. | Lou [43] | Quad-rotor | Explained the distinctive features of droplet dispersion and drift capableness on several destructive insects, and also illustrated the affection and consumption of cotton leaves during UAV sprinkling. | 2018 | Agricultural spraying |
| 39. | Fu [44] | Multi-rotor | Highlighted the effectiveness regarding a multi-spectral camera installed on a UAV for observing wheat growth indices. | 2020 | Crop monitoring |
| 40. | Qin [45] | Small UAV | Analyzed the direct influence of different UAV sprinkling parameters based on height and fluid concentrations. The study field also highlights the displacement of droplets on the wheat canopy and the suppression of dusty mildew. | 2018 | Agricultural spraying |
| 41. | Marinello [46] | Fixed-wing, helicopters, multicopters | Proposed a technical analysis of UAVs’ ultimate act to assume the exact aptness for agricultural operations. | 2016 | Crop monitoring and livestock farming |
| 42. | Poley [47] | - | Explained that spectral and structural data imagery can evaluate vegetation biomass in a mixture of perspectives correctly. | 2020 | Crop monitoring |
| 43. | Messina [48] | - | Reviewed the thermal remote sensing in agriculture and highlighted the recent UAV purposes and future opportunities. | 2020 | Crop monitoring |
| 44. | Ni [49] | Quadcopter (DJI phantom) | Described a crop monitoring technique that efficiently utilizes a UAV as an operating platform. | 2016 | Crop monitoring |
| 45. | Panday [50] | Multi-rotor and fixed-wing | Highlighted UAV based data solutions and the economic importance of crop productivity in low-income nations for a small-scale farming. And also portrayed the possible advantages and barriers of UAV based crop monitoring. | 2020 | Crop monitoring |
| 46. | Wen [51] | Quad-rotor | Portrayed the modern architecture and analysis of a shifting sprinkling system for UAVs. | 2018 | Agricultural spraying |
| 47. | Ayhan [52] | - | Proposed an object-based vegetation detection method utilizing NDVI formula and machine learning knowledge. | 2020 | Crop monitoring |
| 48. | Raeva[53] | - | Highlighted the intensive monitoring of crops by employing multi-spectral and thermal imagery from the UAV. | 2018 | Crop monitoring and livestock farming |
| 49. | Nhamo [54] | - | Highlighted UAV’s role regarding NDVI in evaluating crop health, evaporation, water stress, etc. | 2020 | Crop monitoring |
| 50. | Yallappa D. [55] | Hexacopter | Developed UAV mounted sprayer for pesticide utilization. | 2017 | Agricultural spraying |
| 51. | Chebrolu[56] | - | Presented a process that comprises the crop arrangement by employing harmful data about missing crops and utilizing the matching data. Plus, the usage of UAV 3-D imaginary is also appropriately represented. | 2018 | Crop monitoring and livestock farming |
| 52. | Hentschke [57] | Octocopter | Highlighted altitude patronage for the liquid deployment device aperture control in a UAV applied in agriculture. | 2018 | Agricultural spraying |
| 53. | Chen [58] | Quadrotor | Examined that choosing a nozzle with a comparably small size for UAV can develop planthoppers’ control impact. | 2020 | Agricultural spraying |
| 54. | Agapiou [59] | - | Explored various visible vegetation indices in diverse conditions by applying different UAV sensors and cameras to verify the execution. | 2020 | Crop monitoring |
| 55. | García-Martínez [60] | Quadcopter | To accurately determine the crop yield, various multispectral and RGB vegetation indices were sufficiently examined. | 2020 | Crop monitoring |
| 56. | Manfreda [61] | - | Overviewed the current study and purposes of UAS in general and agricultural monitoring to know the future possibilities, scopes, improvements, and barriers. | 2018 | Crop monitoring |
| 57. | Gao [62] | - | Developed a machine learning system for various kinds of farm areas and orchards regarding the agricultural spraying system. | 2018 | Agricultural spraying |
| 58. | Gao [63] | Quad-rotor | Outlined a structure to provide insights into the special connection among pests, diseases, and weather parameters. | 2020 | Crop monitoring |
| 59. | Basso [64] | Quad-rotor | Proposed a model of an ingrained real-time UAV spraying control method, supported by imminent image processing. | 2019 | Crop monitoring and agricultural spraying |
| 60. | Guo [65] | Quad-rotor | Developed a mathematical landing experiment and simulation of the agricultural UAV. | 2020 | Crop monitoring and livestock farming |
| 61. | Kunwar K. Singh [66] | - | Reviewed the fundamental analysis and methodological advancements of UAS imagery for terrestrial purposes. | 2018 | Crop monitoring |
| Types | UAV-CR | UAV-SR | UAV-E |
|---|---|---|---|
| Range | <30 km | <70 km | <500 km |
| Durability | <4 h | <6 h | <36 h |
| Mass | <150 kg | <200 kg | <1250 kg |
| Speed | <7 m·s−1 | <135 m·s−1 | <200 m·s−1 |
| Climb rate | ≤3000 m | ≤3000 m | ≤8000 m |
| Altitude | <1000 ft | <50,000 ft | <65,000 ft |
| Weight-load capacity | <6 lbs | <3800 lbs | <1900 lbs |
| Name of the Element | Objective | Reference |
|---|---|---|
| Camera (RGB/Infrared/Thermal) | Capturing images | [1,2,3,4,5,6,7,8,9,10,13,15,16,18,21,23,25,26,27,28,29,31,34,35,36,37,38,39,40,41,42,43,44,46,47,48,49,50,51,52,53,54,55,56,57,59,60,61,62,63,64,65,66,69,70,72,73,74,77,84,85,86,87,88,89,90,91,92,93,94,95,96,97] |
| BLDC | Movement control | [22,31,55,81,89] |
| ESC | Adjusting BLDC velocity | [6,22,23,24,27,33,55,70,78,83,87] |
| GPS | Navigating | [1,3,5,6,8,9,10,11,13,15,16,18,23,25,26,27,28,29,30,31,33,35,36,39,40,43,44,45,47,48,50,51,54,56,57,58,60,63,65,69,70,73,74,78,83,86,89,90,91,92,93,94,95,96,97,98] |
| WSN | Monitoring circumstances | [4,5,11,55,61,94,96,99] |
| Altimeter | Measuring altitude | [4,83,90] |
| Accelerometer | Acceleration grading | [3,4,6,9,16,18,26,31,33,57,74,88,89,90,95,96] |
| Gyroscopes | Maintaining orientation and angular velocity. | [3,6,9,13,26,31,33,74,76,83,89,90,93] |
| Magnetometer | Measuring the strength and direction of the magnetic field. | [3,6,31,33,57,74,76,95,96] |
| Battery | Retaining power | [1,3,4,5,6,7,8,9,10,11,12,15,18,22,23,24,25,27,28,30,31,33,34,42,44,46,49,50,55,58,62,63,65,67,69,70,71,72,73,74,75,78,79,80,81,83,87,89,91,96] |
| Name of the Element | Objective | References |
|---|---|---|
| Adobe Photoshop | Distortion emendation | [8,36] |
| GIS | Capturing and analyzing spatial and geographic data. | [4,34,39,50,86,89,93,94,96,98] |
| QGIS | Vegetation calculation | [8,23,28,36,37,60] |
| ArcGIS | Connecting humans, locations, and information by utilizing interactive maps | [9,14,25,35,66,97] |
| MAVLink | Communicating with UAVs | [1,95] |
| Python | Controlling | [38,57,64,77,87,89,97] |
| MATLAB | Image-processing and analysis | [1,3,5,8,18,20,24,28,31,33,36,39,40,51,57,60,62,64,70,73,91,96] |
| Pix4D | Vegetation calculation and 3-D models construction | [14,25,35,36,60,63,66,94] |
| C++ | Image processing | [24,40,64,90] |
| Index | Full Form | Formula |
|---|---|---|
| TNDVI | Transformed NDVI | ((NIR−RED)/+0.5) 0.5 |
| RVI | Ratio Vegetation Index | (NIR/RED) |
| EVI | Enhanced Vegetation Index | 2.5 (NIR−RED)/(NIR + 6 RED−7.5 BLUE + 1) |
| SAVI | Soil Adjusted Vegetation Index | 1.5 (NIR−RED)/(NIR + RED + 0.5) |
| GSAVI | Green SAVI | 1.5 (NIR−GREEN)/(NIR + GREEN + 0.5) |
| OSAVI | Optimized SAVI | 1.16 (NIR−RED)/(NIR + RED + 0.16) |
| RDVI | Renormalized Difference Vegetation Index | (NIR−RED)/(NIR + RED)0.5 |
| UAV Type | Nozzle Numbers | Nozzle Type | Spraying Speed | Maximum Load | Maximum Speed (Full Load) | References |
|---|---|---|---|---|---|---|
| 3WQF120-12 | 2 | LU120-02 | 0.80 L/min | 12 L | 5 ms−1 | [7] |
| 3CD-15 | 4 | Flat-fan 01 | 0.54 L/min | 15 L | 6 ms−1 | [7] |
| WSZ-0610 | 2 | Centrifugal atomizer | 0.72 L/min | 10 L | 4 ms−1 | [7] |
| HY-B-15L | 5 | Four flat-fan and one cone | 0.38 L/min | 15 L | 4.5 ms−1 | [7] |
| Six-rotor UAV | 4 | Fan-shaped | 3.15 L/min | 10 kg | 16 ms−1 | [42] |
| Jifei P20 UAV | 4 | Centrifugal nozzle | 200–800 mL/min | 6–10 L | 8 ms−1 | [43] |
| N-3 UAV | 2 | Rotary atomizer | 15 L·hm−2 | 25 L | 4 ms−1 | [45] |
| Knapsack-type electric fog sprayer 3WBD-16L | 1 | Fan-type nozzle | 300 L·hm−2 | 20 L | 0.8–1 ms−1 | [45] |
| Hexa-copter | 4 | Flat-fan | 2.5 L/min | 5 L | 3.6 kmh−1 | [55] |
| Freedom Eagle 1s (Quad-rotor) | 4 | LU110-01 | 1.04 L/min | 10 L | 3.3 ms−1 | [58] |
| Six rotor | 6 | Hollow Conical | 680 mL/min | 30 L | 5 ms−1 | [98] |
| Single rotor | 3 | LU120-01 | 300 mL/min | 12 L | 4–5 ms−1 | [58,98] |
| Single rotor | 3 | LU120-02 | 2.52 L/min | 12 L | 4–5 ms−1 | [58,98] |
| DJI AGRAS MG 1S | 4 | XR11001 (Flat-fan) | 0.43 L/min | 10 L | 8 ms−1 | [99] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahman, M.F.F.; Fan, S.; Zhang, Y.; Chen, L. A Comparative Study on Application of Unmanned Aerial Vehicle Systems in Agriculture. Agriculture 2021, 11, 22. https://doi.org/10.3390/agriculture11010022
Rahman MFF, Fan S, Zhang Y, Chen L. A Comparative Study on Application of Unmanned Aerial Vehicle Systems in Agriculture. Agriculture. 2021; 11(1):22. https://doi.org/10.3390/agriculture11010022
Chicago/Turabian StyleRahman, Mohammad Fatin Fatihur, Shurui Fan, Yan Zhang, and Lei Chen. 2021. "A Comparative Study on Application of Unmanned Aerial Vehicle Systems in Agriculture" Agriculture 11, no. 1: 22. https://doi.org/10.3390/agriculture11010022
APA StyleRahman, M. F. F., Fan, S., Zhang, Y., & Chen, L. (2021). A Comparative Study on Application of Unmanned Aerial Vehicle Systems in Agriculture. Agriculture, 11(1), 22. https://doi.org/10.3390/agriculture11010022