
Remote-Controlled Monitoring of Flying Pests with an Electrostatic Insect Capturing Apparatus Carried by an Unmanned Aerial Vehicle

 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
2.1. A Quadrotor Drone (Quadcopter)
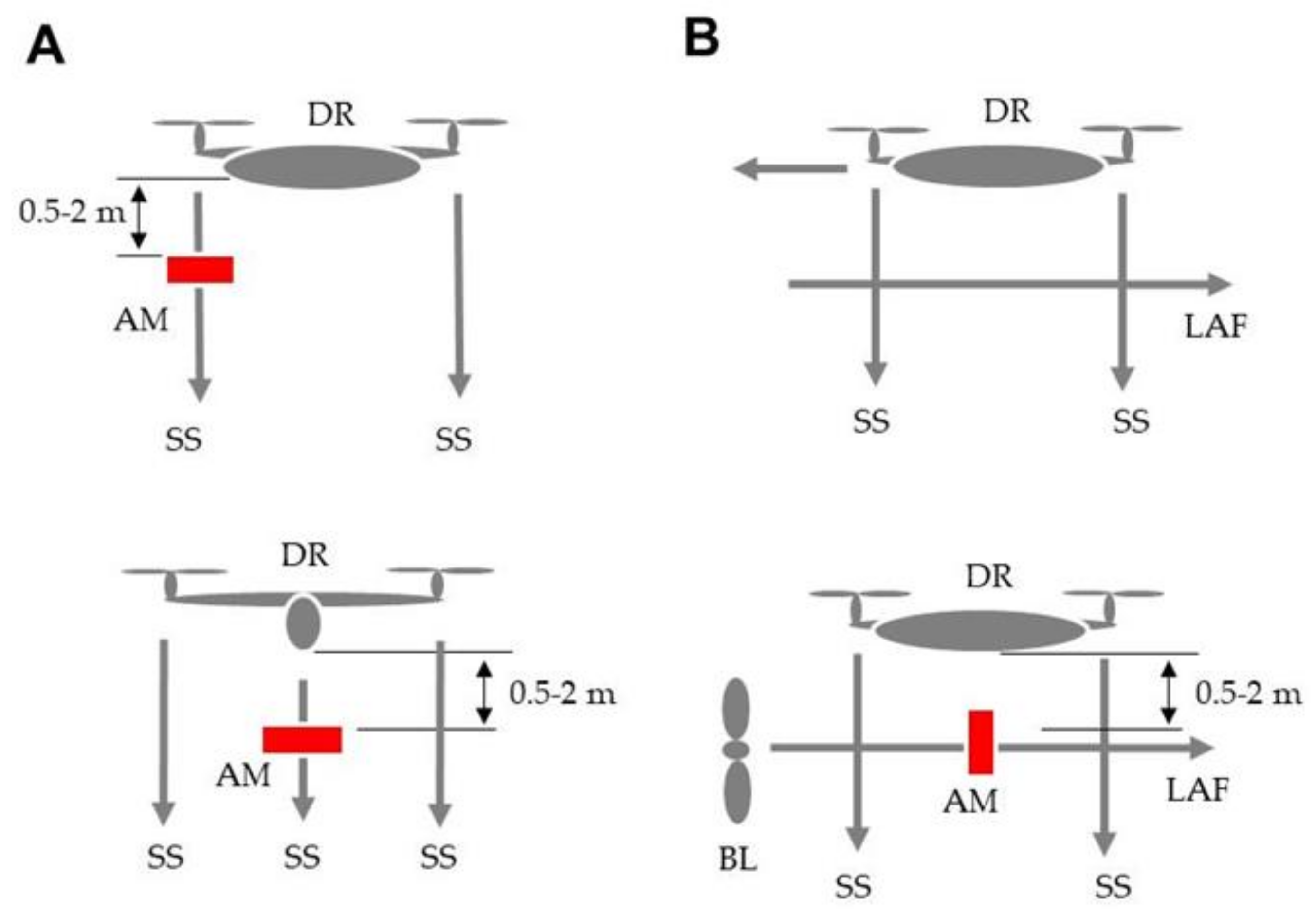
2.2. Measurement of Airflow Speed
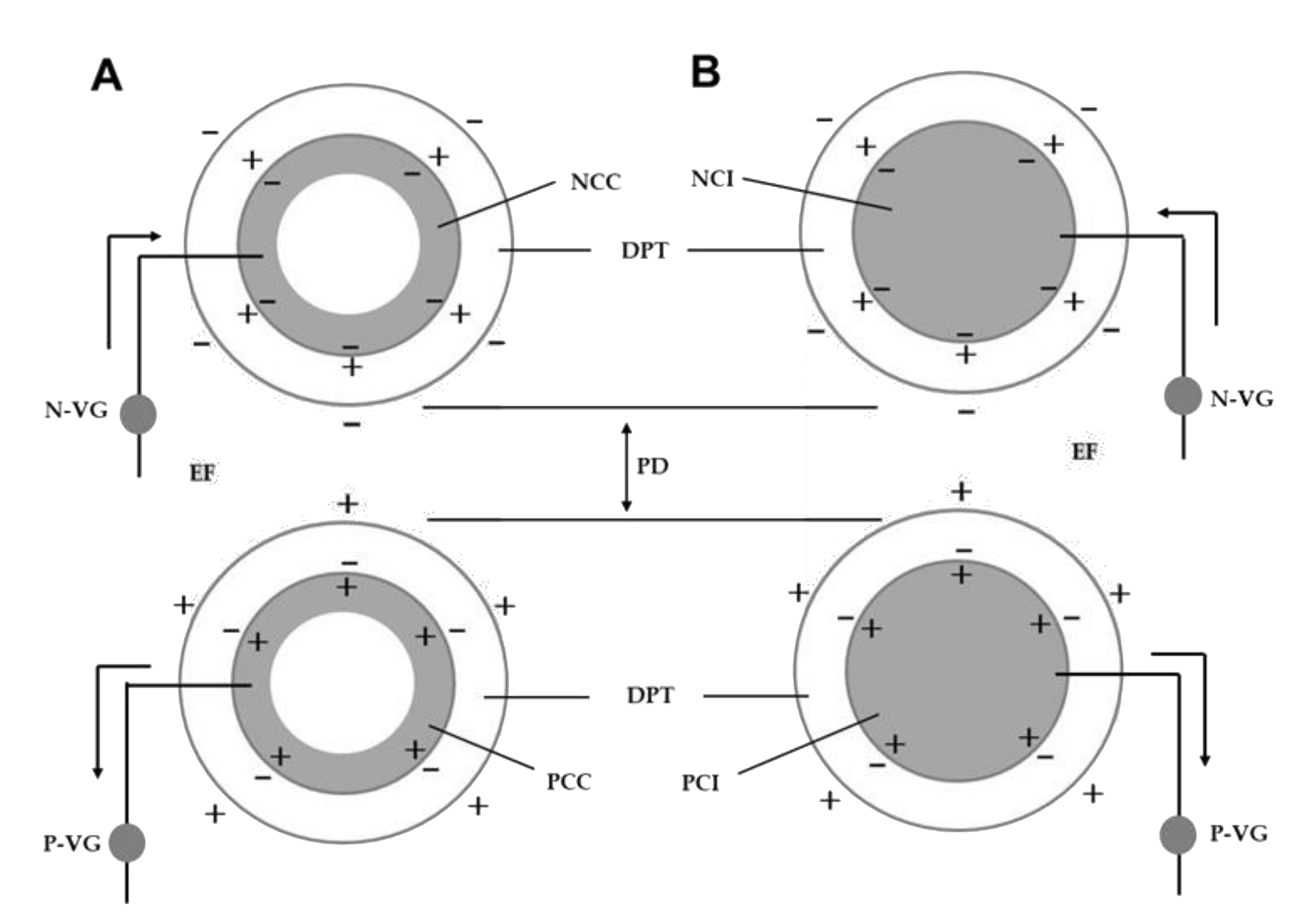
2.3. Charging of the Insulator Tube and Formation of an Electric Field
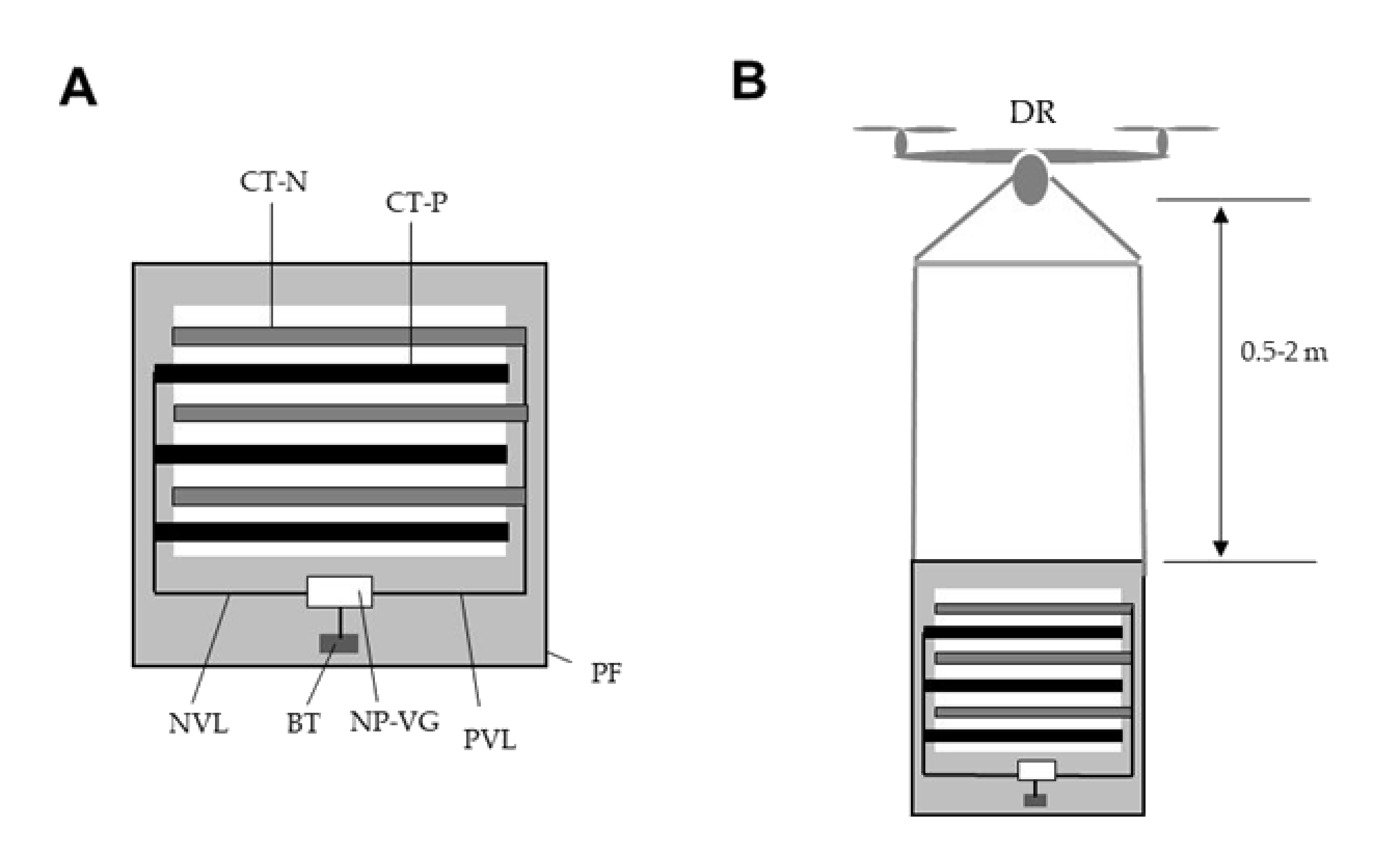
2.4. Construction of the DD-Screen and Its Attachment to a Drone
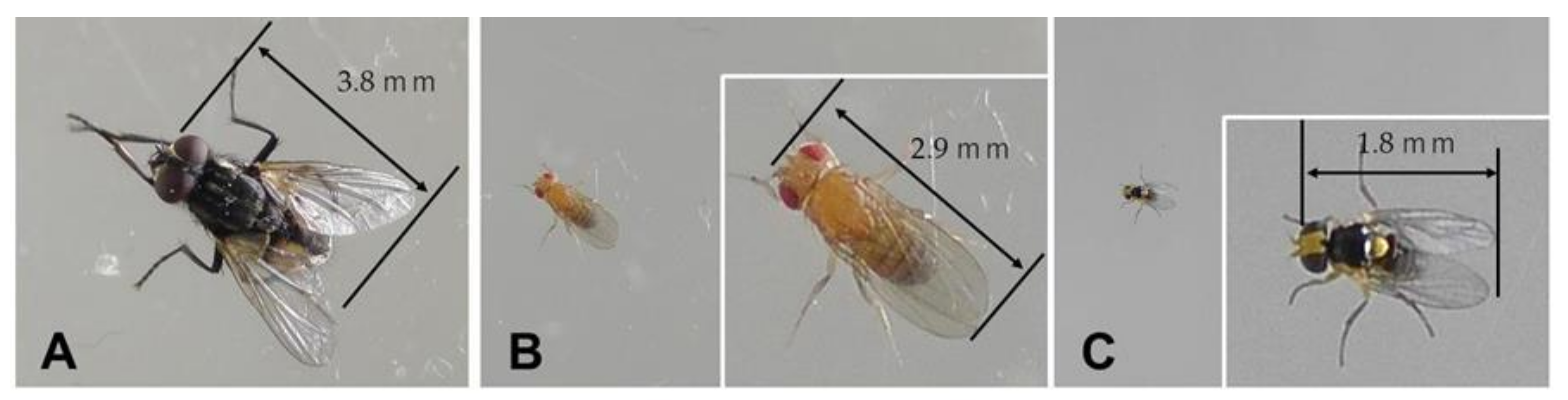
2.5. Test Flies and Insect Capturing Assay
2.6. Trial Flight under Field Conditions
2.7. Statistical Analysis
3. Results and Discussion
3.1. The Propeller Slipstream Disturbs the Longitudinal Airflow toward the DD-Screen Carried by the Drone
3.2. The Drone Could Carry the Newly Devised DD-Screen in a Remote-Controlled Flight
3.3. The DD-Screen Can Capture Airborne Insects in Windy Conditions
3.4. A Drone-Carried DD-Screen Is an Effective Tool to Capture Airborne Insects during a Remote-Controlled Flight
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Kusakari, S.; Okada, K.; Shibao, M.; Toyoda, H. High voltage electric fields have potential to create new physical pest control systems. Insects 2020, 11, 447. [Google Scholar] [CrossRef]
- Matsuda, Y.; Ikeda, H.; Moriura, N.; Tanaka, N.; Shimizu, K.; Oichi, W.; Nonomura, T.; Kakutani, K.; Kusakari, S.; Higashi, K.; et al. A new spore precipitator with polarized dielectric insulators for physical control of tomato powdery mildew. Phytopathology 2006, 96, 967–974. [Google Scholar] [CrossRef]
- Shimizu, K.; Matsuda, Y.; Nonomura, T.; Ikeda, H.; Tamura, N.; Kusakari, S.; Kimbara, J.; Toyoda, H. Dual protection of hydroponic tomatoes from rhizosphere pathogens Ralstonia solanacearum and Fusarium oxysporum f. sp. radicis-lycopersici and airborne conidia of Oidium neolycopersici with an ozone-generative electrostatic spore precipitator. Plant Pathol. 2007, 56, 987–997. [Google Scholar] [CrossRef]
- Tanaka, N.; Matsuda, Y.; Kato, E.; Kokabe, K.; Furukawa, T.; Nonomura, T.; Honda, K.; Kusakari, S.; Imura, T.; Kimbara, J.; et al. An electric dipolar screen with oppositely polarized insulators for excluding whiteflies from greenhouses. Crop Prot. 2008, 27, 215–221. [Google Scholar] [CrossRef]
- Matsuda, Y.; Nonomura, T.; Kakutani, K.; Takikawa, Y.; Kimbara, J.; Kasaishi, Y.; Kusakari, S.; Toyoda, H. A newly devised electric field screen for avoidance and capture of cigarette beetles and vinegar flies. Crop Prot. 2011, 30, 155–162. [Google Scholar] [CrossRef]
- Takikawa, Y.; Matsuda, Y.; Nonomura, T.; Kakutani, K.; Kusakari, S.; Toyoda, H. An electrostatic-barrier-forming window that captures airborne pollen grains to prevent pollinosis. Int. J. Environ. Res. Public Health 2017, 14, 82. [Google Scholar] [CrossRef]
- Matsuda, Y.; Takikawa, Y.; Nonomura, T.; Kakutani, K.; Okada, K.; Shibao, M.; Kusakari, S.; Miyama, K.; Toyoda, H. A simple electrostatic device for eliminating tobacco sidestream to prevent passive smoking. Instruments 2018, 2, 13. [Google Scholar] [CrossRef] [Green Version]
- Toyoda, H.; Kusakari, S.; Matsuda, Y.; Kakutani, K.; Xu, L.; Nonomura, T.; Takikawa, Y. Electric field screen structures. In An Illustrated Manual of Electric Field Screens: Their Structures and Functions; Toyoda, H., Ed.; RAEFSS Publishing Department: Nara, Japan, 2019; pp. 9–15. [Google Scholar]
- Kakutani, K.; Matsuda, Y.; Nonomura, T.; Kimbara, J.; Kusakari, S.; Toyoda, H. Practical application of an electric field screen to an exclusion of flying insect pests and airborne conidia from greenhouses with a good air penetration. J. Agric. Sci. 2012, 4, 51–60. [Google Scholar] [CrossRef] [Green Version]
- Nonomura, T.; Matsuda, Y.; Kakutani, K.; Kimbara, J.; Osamura, K.; Kusakari, S.; Toyoda, H. An electric field strongly deters whiteflies from entering window-open greenhouses in an electrostatic insect exclusion strategy. Eur. J. Plant Pathol. 2012, 134, 661–670. [Google Scholar] [CrossRef]
- Matsuda, Y.; Nonomura, T.; Kakutani, K.; Kimbara, J.; Osamura, K.; Kusakari, S.; Toyoda, H. Avoidance of an electric field by insects: Fundamental biological phenomenon for an electrostatic pest-exclusion strategy. J. Phys. Conf. Ser. 2015, 646, 0120031–0120034. [Google Scholar] [CrossRef] [Green Version]
- Nonomura, T.; Matsuda, Y.; Kakutani, K.; Takikawa, Y.; Kimbara, J.; Osamura, K.; Kusakari, S.; Toyoda, H. Prevention of whitefly entry from a greenhouse entrance by furnishing an airflow-oriented pre-entrance room guarded with electric field screens. J. Agric. Sci. 2014, 6, 172–184. [Google Scholar] [CrossRef] [Green Version]
- Takikawa, Y.; Matsuda, Y.; Nonomura, T.; Kakutani, K.; Okada, K.; Shibao, M.; Kusakari, S.; Miyama, K.; Toyoda, H. Exclusion of whiteflies from a plastic hoop greenhouse by a bamboo blind-type electric field screen. J. Agric. Sci. 2020, 12, 50–60. [Google Scholar]
- Matsuda, Y.; Kakutani, K.; Nonomura, T.; Kimbara, J.; Kusakari, S.; Osamura, K.; Toyoda, H. An oppositely charged insect exclusion screen with gap-free multiple electric fields. J. Appl. Phys. 2012, 112, 116103. [Google Scholar] [CrossRef] [Green Version]
- Ruwaimana, M.; Satyanarayana, B.; Otero, V.; Muslim, A.M.; Syafiq, A.M.; Ibrahim, S.; Raymaekers, D.; Koedam, N.; Dahdouh-Guebas, F. The advantages of using drones over space-borne imagery in the mapping of mangrove forests. PLoS ONE 2018, 13, e0200288. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Forsmoo, J.; Anderson, K.; Macleod, C.J.A.; Wilkinson, M.E.; DeBell, L.; Brazier, R.E. Structure from motion photogrammetry in ecology: Does the choice of software matter? Eco. Evol. 2019, 9, 12964–12979. [Google Scholar] [CrossRef]
- Brady, J.M.; Stokes, M.D.; Bonnardel, J.; Bertram, T.H. Characterization of a quadrotor unmanned aircraft system for aerosol-particle-concentration measurements. Environ. Sci. Technol. 2016, 50, 1376–1383. [Google Scholar] [CrossRef]
- Rohi, G.; Ejofodomi, O.; Ofualagba, G. Autonomous monitoring, analysis, and countering of air pollution using environmental drones. Heliyon 2020, 6, e03252. [Google Scholar] [CrossRef] [Green Version]
- Ferrández-Pastor, F.J.; García-Chamizo, J.M.; Nieto-Hidalgo, M.; Mora-Martínez, J. Precision agriculture design method using a distributed computing architecture on internet of things context. Sensors 2018, 18, 1731. [Google Scholar] [CrossRef] [Green Version]
- Maes, W.H.; Steppe, K. Perspectives for remote sensing with unmanned aerial vehicles in precision agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef] [PubMed]
- Klosterman, S.; Richardson, A.D. Observing spring and fall phenology in a deciduous forest with aerial drone imagery. Sensors 2017, 17, 2852. [Google Scholar] [CrossRef] [Green Version]
- Poblete, T.; Ortega-Farías, S.; Ryu, D. Automatic coregistration algorithm to remove canopy shaded pixels in UAV-borne thermal images to improve the estimation of crop water stress index of a drip-irrigated cabernet sauvignon vineyard. Sensors 2018, 18, 397. [Google Scholar] [CrossRef] [Green Version]
- Vanegas, F.; Bratanov, D.; Powell, K.; Weiss, J.; Gonzalez, F. A novel methodology for improving plant pest surveillance in vineyards and crops using UAV-based hyperspectral and spatial data. Sensors 2018, 18, 260. [Google Scholar] [CrossRef] [Green Version]
- Uddin, M.A.; Mansour, A.; Jeune, D.L.; Ayaz, M.; Aggoune, E.-H.M. UAV-assisted dynamic clustering of wireless sensor networks for crop health monitoring. Sensors 2018, 18, 555. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Qin, W.; Qiu, B.; Xue, X.; Chen, C.; Xu, Z.; Zhou, Q. Droplet deposition and control effect of insecticides sprayed with an unmanned aerial vehicle against plant hoppers. Crop Prot. 2016, 85, 79–88. [Google Scholar] [CrossRef]
- Wu, Y.; Qi, L.; Zhang, H.; Musiu, E.M.; Yang, Z.; Wang, P. Design of UAV downwash airflow field detection system based on strain effect principle. Sensors 2019, 19, 2630. [Google Scholar] [CrossRef] [Green Version]
- Cloonan, K.R.; Abraham, J.; Angeli, S.; Syed, Z.; Rodriguez-Saona, C. Advances in the chemical ecology of the spotted wing drosophila (Drosophila suzukii) and its applications. J. Chem. Ecol. 2018, 44, 922–939. [Google Scholar] [CrossRef] [PubMed]
- Roosjen, P.P.J.; Kellenberger, B.; Kooistra, L.; Green, D.R.; Fahrentrapp, J. Deep learning for automated detection of Drosophila suzukii: Potential for UAV-based monitoring. Pest Manag. Sci. 2020, 76, 2994–3002. [Google Scholar] [CrossRef] [PubMed]
- Harmon, D.S.; Haseeb, M.; Kanga, L.H.B.; Liburd, O.E. Evaluation of monitoring traps and lures for Drosophila suzukii (Diptera: Drosophilidae) in berry plantings in Florida. Insects 2019, 10, 313. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Yang, S.; Liu, X.; Wang, J.; Norton, T.; Chen, J.; Tan, Y. The computational fluid dynamic modeling of downwash flow field for a six-rotor UAV. Front. Agr. Sci. Eng. 2018, 5, 159–167. [Google Scholar] [CrossRef] [Green Version]
- Griffith, W.T. Electrostatic phenomena. In The Physics of Everyday Phenomena, a Conceptual Introduction to Physics; Bruflodt, D., Loehr, B.S., Eds.; McGraw-Hill: New York, NY, USA, 2004; pp. 232–252. [Google Scholar]
- Filho, F.H.; Heldens, W.B.; Kong, Z.; de Lange, E.S. Drones: Innovative technology for use in precision pest management. J. Econ. Entomol. 2020, 113, 1–25. [Google Scholar] [CrossRef] [Green Version]
- Hardy, A.; Makame, M.; Cross, D.; Majambere, S.; Msellem, M. Using low-cost drones to map malaria vector habitats. Parasit. Vectors 2017, 10, 29. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rupert, B. How to fly quadcopters and rules. In Drones, the Ultimate Guide; Rupert, B., Ed.; CreateSpace Independent Publishing Platform: Scotts Valley, CA, USA, 2017; pp. 18–24. [Google Scholar]
- Wegner, H.E. Electrical charging generators. In McGraw-Hill Encyclopedia of Science and Technology, 9th ed.; Geller, E., Moore, K., Well, J., Blumet, D., Felsenfeld, S., Martin, T., Rappaport, A., Wagner, C., Lai, B., Taylor, R., Eds.; The Lakeside Press: New York, NY, USA, 2002; pp. 42–43. [Google Scholar]
- Matsuda, Y.; Kakutani, K.; Nonomura, T.; Kimbara, J.; Osamura, K.; Kusakari, S.; Toyoda, H. Safe housing ensured by an electric field screen that excludes insect-net permeating haematophagous mosquitoes carrying human pathogens. J. Phys. Conf. Ser. 2015, 646, 0120021–0120024. [Google Scholar] [CrossRef] [Green Version]
- Takikawa, Y.; Matsuda, Y.; Kakutani, K.; Nonomura, T.; Kusakari, S.; Okada, K.; Kimbara, J.; Osamura, K.; Toyoda, H. Electrostatic insect sweeper for eliminating whiteflies colonizing host plants; a complementary pest control device in an electric field screen-guarded greenhouse. Insects 2015, 6, 442–454. [Google Scholar] [CrossRef] [PubMed]
- The Physics Classroom Website. The Plane and the Wind. Available online: https://www.physicsclassroom.com/memedia/vectors/plane.cfm (accessed on 10 November 2020).
- Van der Vaart, K.; Sinhuber, M.; Reynolds, A.M.; Ouellette, N.T. Mechanical spectroscopy of insect swarms. Sci. Adv. 2019, 10, 5. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alam, M.J.; Zurek, L. Association of Escherichia coli O157:H7 with houseflies on a cattle farm. Appl. Environ. Microbiol. 2004, 70, 7578–7580. [Google Scholar] [CrossRef] [PubMed] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Speed of L-Airflow Produced by a Blower (m/s) | Position (m) of AM I | Speed (m/s) of L-Airflow at the Site of AM | Volumetric Flow Rate (m3/min) at the Site of AM | Percentage of Volumetric Flow Rate in AM II |
|---|---|---|---|---|
| 2 | 0.5 | 0.14 ± 0.05 | 0.13 ± 0.05 | 4.7 ± 1.8 a |
| 1 | 0.18 ± 0.04 | 0.16 ± 0.04 | 6.0 ± 1.5 a | |
| 1.5 | 0.88 ± 0.19 | 0.79 ± 0.17 | 29.3 ± 6.4 c | |
| 2 | 2.46 ± 0.35 | 2.21 ± 0.32 | 82.0 ± 11.7 e | |
| 5 | 0.5 | 0.14 ± 0.11 | 0.13 ± 0.10 | 2.8 ± 2.3 a |
| 1 | 0.66 ± 0.44 | 0.59 ± 0.40 | 12.4 ± 3.8 b | |
| 1.5 | 2.38 ± 0.64 | 2.14 ± 0.57 | 47.6 ± 12.8 d | |
| 2 | 4.26 ± 0.30 | 3.83 ± 0.27 | 85.2 ± 6.1 e | |
| 8 | 0.5 | 0.48 ± 0.26 | 0.43 ± 0.23 | 6.0 ± 3.2 a |
| 1 | 1.14 ± 0.34 | 1.03 ± 0.30 | 14.3 ± 4.2 b | |
| 1.5 | 5.36 ± 1.04 | 4.82 ± 0.93 | 67.0 ± 12.9 d | |
| 2 | 7.86 ± 0.39 | 7.07 ± 0.35 | 98.3 ± 2.1 f |
| Wind Speed (m/s) | Test Insect | Negative and Positive Voltages (kV) Applied to DD-Screen | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 2 | 3 | 4 | 5 | 5.5 | 6 | 6.5 | 7 | ||
| 2 | TLM | 0 | 90.2 ± 6.7 a | 100 a | 100 a | 100 a | 100 a | 100 | 100 |
| VF | 0 | 51.9 ± 3.3 b | 93.6 ± 8.5 b | 100 a | 100 a | 100 a | 100 | 100 | |
| HF | 0 | 12.4 ± 3.4 c | 31.9 ± 2.3 c | 91.2 ± 4.6 b | 100 a | 100 a | 100 | 100 | |
| 5 | TLM | 0 | 44.7 ± 2.3 b | 95.5 ± 5.7 b | 100 a | 100 a | 100 a | 100 | 100 |
| VF | 0 | 8.2 ± 0.7 d | 22.2 ± 8.7 d | 93.8 ± 7.8 b | 100 a | 100 a | 100 | 100 | |
| HF | 0 | 0 e | 6.2 ± 0.5 e | 31.9 ± 6.3 c | 89.2 ± 6.2 b | 100 a | 100 | 100 | |
| 8 | TLM | 0 | 10.2 ± 0.7 d | 41.7 ± 7.5 c | 96.4 ± 8.6 b | 100 a | 100 a | 100 | 100 |
| VF | 0 | 0 e | 7.7 ± 0.5 e | 42.7 ± 5.6 c | 96.4 ± 8.5 b | 100 a | 100 | 100 | |
| HF | 0 | 0 e | 0 f | 9.2 ± 0.7 d | 43.8 ± 6.3 c | 91.2 ± 2.7 b | 100 | 100 | |
| Blow Speed (m/s) | Position (m) of DD-Screen | Percentage of Test Insects Captured with DD-Screen Oppositely Charged with 6.5 kV | ||
|---|---|---|---|---|
| Tomato Leaf Miners | Vinegar Flies | Houseflies | ||
| 2 | 0.5 | 0 a | 0 a | 0 a |
| 1 | 0 a | 0 a | 0 a | |
| 1.5 | 5.2 ± 3.6 b | 1.9 ± 7.3 b | 0.9 ± 2.5 b | |
| 2 | 93.6 ± 3.6 d | 92.9 ± 4.5 d | 89.4 ± 4.9 d | |
| 5 | 0.5 | 0 a | 0 a | 0 a |
| 1 | 0 a | 0 a | 0 a | |
| 1.5 | 67.7 ± 3.7 c | 65.9 ± 7.3 c | 50.7 ± 6.2 c | |
| 2 | 94.2 ± 1.6 d | 93.6 ± 3.8 d | 91.2 ± 4.8 d | |
| 8 | 0.5 | 0 a | 0 a | 0 a |
| 1 | 12.1 ± 7.9 b | 10.9 ± 7.3 b | 5.6 ± 3.6 b | |
| 1.5 | 92.1 ± 2.4 d | 90.9 ± 1.3 d | 86.5 ± 3.3 d | |
| 2 | 98.5 ± 0.3 e | 97.5 ± 2.3 e | 93.9 ± 2.7 d | |
| Experiment II | Site of Flight | Total Number of Captured Insects | Number of Insects Captured III | |||
|---|---|---|---|---|---|---|
| Flies | Others | |||||
| L | M | S | ||||
| A (NFT) | Trellised vines in orchard | 2 | 0 | 2 | 0 | 0 |
| Blueberries in field | 4 | 0 | 4 | 0 | 0 | |
| Basils in field | 9 | 6 | 0 | 2 | 1(WF) | |
| B (PF) | Non-trellised vines in orchard | 24 | 0 | 24 | 0 | 0 |
| Blueberries in field | 45 | 0 | 45 | 0 | 0 | |
| Basils in field | 49 | 7 | 0 | 24 | 17(WF) + 1(WA) | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kakutani, K.; Matsuda, Y.; Nonomura, T.; Takikawa, Y.; Osamura, K.; Toyoda, H. Remote-Controlled Monitoring of Flying Pests with an Electrostatic Insect Capturing Apparatus Carried by an Unmanned Aerial Vehicle. Agriculture 2021, 11, 176. https://doi.org/10.3390/agriculture11020176
Kakutani K, Matsuda Y, Nonomura T, Takikawa Y, Osamura K, Toyoda H. Remote-Controlled Monitoring of Flying Pests with an Electrostatic Insect Capturing Apparatus Carried by an Unmanned Aerial Vehicle. Agriculture. 2021; 11(2):176. https://doi.org/10.3390/agriculture11020176
Chicago/Turabian StyleKakutani, Koji, Yoshinori Matsuda, Teruo Nonomura, Yoshihiro Takikawa, Kazumi Osamura, and Hideyoshi Toyoda. 2021. "Remote-Controlled Monitoring of Flying Pests with an Electrostatic Insect Capturing Apparatus Carried by an Unmanned Aerial Vehicle" Agriculture 11, no. 2: 176. https://doi.org/10.3390/agriculture11020176
APA StyleKakutani, K., Matsuda, Y., Nonomura, T., Takikawa, Y., Osamura, K., & Toyoda, H. (2021). Remote-Controlled Monitoring of Flying Pests with an Electrostatic Insect Capturing Apparatus Carried by an Unmanned Aerial Vehicle. Agriculture, 11(2), 176. https://doi.org/10.3390/agriculture11020176