
Applications of Discrete Element Method in the Research of Agricultural Machinery: A Review


Abstract
:1. Introduction
2. DEM Model Establishment and Parameter Calibration of Agricultural Materials
2.1. Soil Model Establishment and Parameter Calibration
2.1.1. Establishment of Soil Contact Model
2.1.2. Calibration of Physical, Contact, and Constitutive Parameters of a Soil Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil Contact Model | Soil Type | Key DEM * Parameters | |||||
|---|---|---|---|---|---|---|---|
| Static Friction Coefficient between Soil Particles | Rolling Friction Coefficient between Soil Particles | Static friction Coefficient between Soil Particles and Contact Material | Rolling Friction Coefficient between Soil Particles and Contact Material | Collision Coefficient of Restitution | Mechanical Parameters | ||
| HMCM * | sea sandy soil [16] | [18] | Steel [53] | Elasticity modulus [18] Particle stiffness [16] | |||
| Hertz-Mindlin with bonding | Norfolk sandy loam soil [52] Clay soil in South China [31] Loam clay soil [32] | [53,54] | [53] | Steel [53] Steel [54] | Steel [54] | Between soil particles [55] Between soil particle and contact material [55] | Shear modulus [53] Poisson’s ratio [53] Bond normal stiffness [52] Bond shear stiffness [52] Critical stress of the bond [32] |
| PBCM * | Sandy loam soil [22,56] Sandy soil [56] Sandy soil [27,57] | [56] | [56] | Normal and shear particle stiffness [22,56] Cohesion strength [58] Young modulus [27] Elasticity modulus of particle; elasticity Modulus of bond; damping coefficient [59] | |||
| HSCM * | Sandy loam soil [28] | [28] | [28] | Steel [28] | Steel [28] | ||
| HSCM with LCM * | Sandy loam soil in North-west area [29] Grapevine antifreezing soil in Ningxia, China [30] Light loam in North China Plain [23] | [23,29] | [23,29] | Steel [23] | Q235 steel rubber [30] Steel [23] | Between soil particle and Q235steel/rubber [30] | Shear strength, yield strength [29] Surface energy [23] |
| Hertz-Mindlin with JKR * Cohesion | Clayey black soil [34] Lateritic soil particles in hot areas [36] | [34] | [34,36] | 65 Mn; PTFE * [34] | 65 Mn; PTFE [34] 28 Mn; B5 board [36] | Between soil particles and 65 Mn/PTFE [34] Between soil particles [36] | Surface energy between soil particles and 65 Mn/PTFE [34] Surface energy between soil particles [36] Poisson’s ratio [34] |
2.2. DEM Model Establishment of Crop Seed and Parameter Calibration
2.2.1. 3D Model Establishment of Crop Seeds
2.2.2. The Contact and Constitutive Parameters of a Crop Seed Model
| Seed Type | 3D Model | Key DEM Parameters | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Coefficient between Soil Particles | Coefficient between Soil Particles and Contact Material | Elasticity Modulus | Damping Coefficient | ||||||
| Static Friction | Rolling Friction | Collision Restitution | Static Friction | Rolling Friction | Collision Restitution | ||||
| Wheat |  [71,72] | [71,82] | [71] | [82] | Steel [82] Low-carbon steel [71] | Low-carbon steel [71] | [82] | Between wheat seed; wheat seed and steel [82] | |
| Maize |  [64,65,66,67] | [64,83] | [64,71,83] | Crylic acid [83] Low-carbon steel [71] | Crylic acid [83] Aluminium; Organic glass [90] Low-carbon steel [71] | ||||
| Rice |  [73]  [74] | [74] | [74] | [74] | |||||
| Potato seed |  Sphere; big ellipsoid particle; small ellipsoid [65] | [84] | [65] | Steel; plastic [65] | Steel; plastic [84] | Steel [65] | |||
| Flax |  [75] | [75] | [75] | [75] | Organic glass; Aluminum cylinder [75] | Organic glass; Aluminum cylinder [75] | Organic glass; steel [75] | [75] | |
| Rapeseed |  [76] | [85,86] | [85,86] | [85] | Abs; aluminium alloy [85] Organic glass [87] | Abs; aluminium alloy [85] Organic glass [76,87] | Abs; aluminium alloy [85] | [95] | [95] |
| Soybean |  [77,78] | [78] | [78] | [78] | |||||
| Black pepper |  [79] | [79] | [79] | steel [79] | steel [79] | [79] | |||
2.3. Other Agricultural Materials
3. DEM Simulation of Agricultural Machinery Operation Processes
3.1. Simulation of Tillage and Soil Preparation
3.1.1. Simulation of Rotary Tillage
3.1.2. Simulation of Subsoiling
3.1.3. Simulation of Plowing
3.1.4. Simulation of Interrow Tillage
3.1.5. Simulation of Soil Compaction and Traction
3.2. Simulation of Seeding
3.2.1. Simulation of Furrow Opening
3.2.2. Simulation of Seed Metering
3.2.3. Simulation of Fertilizer Metering
3.3. Simulation of Crop Harvesting
3.3.1. Simulation of Material Transfer
3.3.2. Simulation of Threshing
3.3.3. Simulation of Cleaning
3.4. Simulation of Post-Harvest Processes
3.4.1. Simulation of Grain Conveying
3.4.2. Simulation of Storage and Discharge of Seed in Silos
3.4.3. Simulation of Grain Separation
4. Research Prospects
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gilandeh, Y.A.; Fazeli, M.; Roshanianfard, A.; Hernández, J.L.H.; Penna, A.F.; Miranda, I.H. Effect of different working and tool parameters on performance of several types of cultivators. Agriculture 2020, 10, 145. [Google Scholar] [CrossRef]
- Yezekyan, T.; Benetti, M.; Armentano, G.; Trestini, S.; Sartori, L.; Marinello, F. Definition of reference models for power, mass, working width, and price for tillage implements. Agriculture 2021, 11, 197. [Google Scholar] [CrossRef]
- Zeng, Z.W.; Chen, Y.; Zhang, X. Modelling the interaction of a deep tillage tool with heterogeneous soil. Comput. Electron. Agric. 2017, 143, 130–138. [Google Scholar] [CrossRef]
- Horabik, J.; Molenda, M. Parameters and contact models for DEM simulations of agricultural granular materials: A review. Biosyst. Eng. 2016, 147, 206–225. [Google Scholar] [CrossRef]
- Zeng, Z.W.; Chen, Y.; Long, Q. Simulation of cotyledon-soil dynamics using the discrete element method (DEM). Comput. Electron. Agric. 2020, 174, 1–9. [Google Scholar] [CrossRef]
- Karmakar, S.; Ashrafizadeh, S.R.; Kushwaha, R.L. Experimental validation of computational fluid dynamics modeling for narrow tillage tool draft. J. Terramech. 2009, 46, 277–283. [Google Scholar] [CrossRef]
- Nematollahi, E.; Zare, S.; Moghaddam, M.M.; Ghasemi, A.; Ghorbani, F.; Banisi, S. DEM-based design of feed chute to improve performance of cone crushers. Miner. Eng. 2021, 168, 106927. [Google Scholar] [CrossRef]
- Cundall, P.A. A computer model for simulation progressive large scale movement in blocky rock system. In Proceedings of the Symposium of International Society of Rock Mechanics, Nancy, France, 4–6 October 1971. [Google Scholar]
- Cundall, P.A.; Strack, O.D.L. A discrete numerical model for granular assemblies. Geotechnique 1979, 29, 47–65. [Google Scholar] [CrossRef]
- Fleissner, F.P. Object Oriented Simulation with Lagrangian Particle Methods; Shaker Verlag: Aachen, Germany, 2010. [Google Scholar]
- Ergenzinger, C.; Seifried, R.; Eberhard, P. A discrete element model to describe failure of strong rock in uniaxial compression. Granul. Matter 2010, 13, 341–364. [Google Scholar] [CrossRef]
- Smilauer, V.; Catalano, E.; Chareyre, B.; Dorofeenko, S.; Duriez, J.; Dyck, N.; Elias, J.; Er, B.; Eulitz, A.; Gladky, A.; et al. Yade Documentation, 2nd ed. The Yade Project. 2015. Available online: http://yade-dem.org/doc/ (accessed on 20 November 2015). [CrossRef]
- Bravo, E.L.; Tijskens, E.; Suárez, M.H.; Cueto, O.G.; Ramon, H. Prediction model for non-inversion soil tillage implemented on discrete element method. Comput. Electron. Agric. 2014, 106, 120–127. [Google Scholar] [CrossRef]
- Shmulevich, I. State of the art modeling of soil–tillage interaction using discrete element method. Soil Tillage Res. 2010, 111, 41–53. [Google Scholar] [CrossRef]
- Coetzee, C.J.; Els, D.N.J. Calibration of discrete element parameters and the modelling of silo discharge and bucket filling. Comput. Electron. Agric. 2009, 65, 198–212. [Google Scholar] [CrossRef]
- Tsuji, T.; Nakagawa, Y.; Matsumoto, N.; Kadono, Y.; Takayama, T.; Tanaka, T. 3-D DEM simulation of cohesive soil-pushing behavior by bulldozer blade. J. Terramech. 2012, 49, 37–47. [Google Scholar] [CrossRef]
- Obermayr, M.; Dressler, K.; Vrettos, C.; Eberhard, P. Prediction of draft forces in cohesionless soil with the Discrete Element Method. J. Terramech. 2011, 48, 347–358. [Google Scholar] [CrossRef]
- Asaf, Z.; Rubinstein, D.; Shmulevich, I. Determination of discrete element model parameters required for soil tillage. Soil Tillage Res. 2007, 92, 227–242. [Google Scholar] [CrossRef]
- Zhang, R.; Han, D.L.; Ji, Q.L.; He, Y.; Li, J.Q. Calibration methods of sandy soil parameters in simulation of Discrete Element Method. Trans. Chin. Soc. Agric. Mach. 2017, 48, 49–56. [Google Scholar]
- Ucgul, M.; Fielke, J.M.; Saunders, C. Three-dimensional discrete element modelling of tillage: Determination of a suitable contact model and parameters for a cohesionless soil. Biosyst. Eng. 2014, 121, 105–117. [Google Scholar] [CrossRef]
- Ucgul, M.; Fielke, J.M.; Saunders, C. 3D DEM tillage simulation: Validation of a hysteretic spring (plastic) contact model for a sweep tool operating in a cohesionless soil. Soil Tillage Res. 2014, 144, 220–227. [Google Scholar] [CrossRef]
- Mak, J.; Chen, Y.; Sadek, M.A. Determining parameters of a discrete element model for soil-tool interaction. Soil Tillage Res. 2012, 118, 117–122. [Google Scholar] [CrossRef]
- Zheng, K.; He, J.; Li, H.W.; Diao, P.S.; Wang, Q.J.; Zhao, H.B. Research on polyline soil breaking blade subsoiler based on subsoiling soil model using Discrete Element Method. Trans. Chin. Soc. Agric. Mach. 2016, 47, 62–72. [Google Scholar]
- Potyondy, D.O.; Cundall, P.A. A bond-particle model for rock. Int. J. Rock Mech. Min. Sci. 2004, 41, 1329–1364. [Google Scholar] [CrossRef]
- Itasca. User’s Manual for PFC3D Version PFC5.0; Itasca Consulting Group, Inc.: Minneapolis, MN, USA, 2017. [Google Scholar]
- Zhang, R.; Li, J. Simulation on mechanical behavior of cohesive soil by Distinct Element Method. J. Terramech. 2006, 43, 303–316. [Google Scholar] [CrossRef]
- Tamas, K.; Jori, I.J. The influence of the soil water content in the soil-tool DEM model. Prog. Agric. Eng. Sci. 2015, 11, 43–70. [Google Scholar] [CrossRef] [Green Version]
- Ucgul, M.; Fielke, J.M.; Saunders, C. Three-dimensional discrete element modelling (DEM) of tillage: Accounting for soil cohesion and adhesion. Biosyst. Eng. 2015, 129, 298–306. [Google Scholar] [CrossRef]
- Shi, L.R.; Zhao, W.Y.; Sun, W. Parameter calibration of soil particles contact model of farmland soil in northwest arid region based on discrete element method. Trans. Chin. Soc. Agric. Eng. 2017, 33, 181–187. [Google Scholar]
- Ma, S.; Xu, L.M.; Yuan, Q.C.; Niu, C.; Zeng, J.; Chen, C.; Wang, S.S.; Yuan, T.X. Calibration of discrete element simulation parameters of grapevine anti freezing soil and its interaction with soil-cleaning components. Trans. Chin. Soc. Agric. Eng. 2020, 36, 40–49. [Google Scholar]
- Fang, H.M.; Ji, C.Y.; Farman, A.C.; Guo, J.; Zhang, Q.Y.; Chaudhry, A. Analysis of soil dynamic behavior during rotary tillage based on Distinct Element Method. Trans. Chin. Soc. Agric. Mach. 2016, 47, 22–28. [Google Scholar]
- Ding, Q.S.; Ren, J.; Belal, E.A.; Zhao, J.Q.; Ge, S.Y.; Li, Y. Analysis of subsoiling process in wet clayey paddy soil. Trans. Chin. Soc. Agric. Mach. 2017, 48, 38–48. [Google Scholar]
- Wei, Z.C.; Su, G.L.; Li, X.Q.; Wang, F.M.; Sun, C.Z.; Meng, Q.Y. Parameter optimization and test of potato harvester wavy sieve based on EDEM. Trans. Chin. Soc. Agric. Mach. 2020, 51, 109–122. [Google Scholar]
- Li, J.W.; Tong, J.; Hu, B.; Wang, H.B.; Mao, C.Y.; Ma, Y.H. Calibration of parameters of interaction between clayey black soil with different moisture content and soil-engaging component in northeast China. Trans. Chin. Soc. Agric. Eng. 2019, 35, 130–140. [Google Scholar]
- Ajmal, M.; Roessler, T.; Richter, C.; Katterfeld, A. Calibration of cohesive DEM parameters under rapid flow conditions and low consolidation stresses. Powder Technol. 2020, 374, 22–32. [Google Scholar] [CrossRef]
- Xing, J.J.; Zhang, R.; Wu, P.; Zhang, X.R.; Dong, X.H.; Chen, Y.; Ru, S.F. Parameter calibration of discrete element simulation model for lateritic soil particles in hot areas of Hainan Province. Trans. Chin. Soc. Agric. Eng. 2020, 36, 158–166. [Google Scholar]
- Ucgul, M.; Saunders, C.; Fielke, J.M. A method of quantifying Discrete Element Method simulations of top soil burial from a mouldboard plough. In Proceedings of the ASABE International Meeting, Orlando, FL, USA, 17–20 July 2016. [Google Scholar]
- Ucgul, M.; Saunders, C.; Fielke, J.M. Discrete element modelling of top soil burial using a full scale mouldboard plough under field conditions. Biosyst. Eng. 2017, 160, 140–153. [Google Scholar] [CrossRef]
- Ucgul, M.; Saunders, C. Simulation of tillage forces and furrow profile during soil-mouldboard plough interaction using discrete element modelling. Biosyst. Eng. 2019, 190, 58–70. [Google Scholar] [CrossRef]
- Liu, J.A. Study on Subsoiler Parameters Optimization and Comprehensive Effect of Subsoiling Based on the Discrete Element Method; China Agricultural University: Beijing, China, 2018. [Google Scholar]
- Bourrier, F.; Kneib, F.; Chareyre, B.; Fourcaud, T. Discrete modeling of granular soils reinforcement by plant roots. Ecol. Eng. 2013, 61, 646–657. [Google Scholar] [CrossRef]
- Tekeste, M.Z.; Way, T.R.; Syed, Z.; Schafer, R.L. Modeling soil-bulldozer blade interaction using the discrete element method (DEM). J. Terramech. 2020, 88, 41–52. [Google Scholar] [CrossRef]
- Wang, X.Z.; Zhang, S.; Pan, H.B.; Zheng, Z.Q.; Huang, Y.X.; Zhu, R.X. Effect of soil particle size on soil-subsoiler interactions using the discrete element method simulations. Biosyst. Eng. 2019, 182, 138–150. [Google Scholar] [CrossRef]
- Milkevych, V.; Munkholm, L.J.; Chen, Y.; Nyord, T. Modelling approach for soil displacement in tillage using discrete element method. Soil Tillage Res. 2018, 183, 60–71. [Google Scholar] [CrossRef]
- Yang, Y.Y.; Li, M.; Tong, J.; Ma, Y.H. Study on the interaction between soil and the five-claw combination of a mole using the discrete element method. Appl. Bionics Biomech. 2018, 08, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Gursoy, S.; Chen, Y.; Li, B. Measurement and modelling of soil displacement from sweeps with different cutting widths. Biosyst. Eng. 2017, 161, 1–13. [Google Scholar] [CrossRef]
- Obermayr, M.; Vrettos, C.; Eberhard, P.; Dauwel, T. A discrete element model and its experimental validation for the prediction of draft forces in cohesive soil. J. Terramech. 2014, 53, 93–104. [Google Scholar] [CrossRef]
- Thakur, S.; Ahmadian, H.; Sun, J.; Ooi, J. Scaling of discrete element model parameters in uniaxial test simulation. In Proceedings of the 6th International Conference on Discrete Element Methods, Golden, CO, USA, 5–6 August 2013; pp. 457–462. [Google Scholar]
- Marigo, M.; Stitt, E.H. Discrete Element Method (DEM) for industrial applications: Comments on calibration and validation for the modelling of cylindrical pellets. KONA Powder Part J. 2015, 32, 236–252. [Google Scholar] [CrossRef] [Green Version]
- Tekeste, M.Z.; Tollner, E.W.; Raper, R.L.; Way, T.R.; Johnson, C.E. Non-linear finite element analysis of cone penetration in layered sandy loam soil-Considering precompression stress state. J. Terramech. 2009, 46, 229–239. [Google Scholar] [CrossRef]
- Mckyes, E.; Ali, S. The cutting of soil by harrow blades. Terramechanics 1977, 14, 43–58. [Google Scholar] [CrossRef]
- Tekeste, M.Z.; Balvanz, L.R.; Hatfield, J.L.; Ghorbani, S. Discrete element modeling of cultivator sweep-to-soil interaction: Worn and hardened edges effects on soil-tool forces and soil flow. J. Terramech. 2019, 82, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Munkholm, L.J.; Nyord, T. A discrete element model for soil-sweep interaction in three different soils. Soil Tillage Res. 2013, 126, 34–41. [Google Scholar] [CrossRef]
- Tamas, K. The role of bond and damping in the discrete element model of soil-sweep interaction. Biosyst. Eng. 2018, 169, 57–70. [Google Scholar] [CrossRef]
- Linde, V.J. Discrete Element Modeling of a Vibratory Subsoiler. Master’s. Thesis, Department of Mechanical and Mechatronic Engineering, University of Stellenbosch, Matieland, South Africa, 2007. [Google Scholar]
- Sadek, M.A.; Chen, Y. Feasibility of using PFC3D to simulate soil flow resulting from a simple soil-engaging tool. Trans. ASABE 2015, 58, 987–996. [Google Scholar]
- Dai, F.; Song, X.F.; Zhao, W.Y.; Zhang, F.W.; Ma, H.J.; Ma, M.Y. Simulative calibration on contact parameters of Discrete Elements for covering soil on whole plastic film mulching on double ridges. Trans. Chin. Soc. Agric. Mach. 2019, 50, 49–56. [Google Scholar]
- Pue, J.D.; Emidio, G.D.; Flores, R.D.; Bezuijen, A.; Cornelis, W.M. Calibration of DEM material parameters to simulate stress-strain behaviour of unsaturated soils during uniaxial compression. Soil Tillage Res. 2019, 194, 104303. [Google Scholar] [CrossRef]
- Kornel, T.; István, J.J.; Mouazen, A.M. Modelling soil-sweep interaction with discrete element method. Soil Tillage Res. 2013, 134, 223–231. [Google Scholar]
- Zhao, H.B.; He, J.; Li, H.W.; Mao, Y.J.; Hu, H.N.; Zhang, Z.Q.; Liu, P. Comparison on soil, straw disturbance and resistance of conventional and plain-straight blade for strip-tillage with Discrete Element Method. Int. Agric. Eng. J. 2018, 27, 229–240. [Google Scholar]
- Guzman, L.J.; Chen, Y.; Landry, H. Discrete element modeling of seed metering as affected by roller speed and damping coefficient. Trans. ASABE 2019, 63, 189–198. [Google Scholar] [CrossRef]
- Yan, H.; Yu, J.Q.; Kou, X.X. A study on boundary modeling of three-dimensional Discrete Element Method based on Pro/ENGINEER. In Proceedings of the ICRTMME, Shenzhen, China, 7–28 January2011. [Google Scholar]
- Yan, H. Anew Kind of Method for the Optimizated Design of Combination Inner-Cell Corn Precision Seed Metering Device; Jilin University: Changchun, China, 2012. [Google Scholar]
- Wang, Y.X.; Liang, Z.J.; Zhang, D.X.; Cui, T.; Shi, S.; Li, K.H.; Yang, L. Calibration method of contact characteristic parameters for corn seeds based on EDEM. Trans. Chin. Soc. Agric. Eng. 2016, 32, 36–42. [Google Scholar]
- Liu, W.Z.; He, J.; Li, H.W.; Li, X.Q.; Zheng, K.; Wei, Z.C. Calibration of simulation parameters for potato minituber based on EDEM. Trans. Chin. Soc. Agric. Mach. 2018, 49, 125–135. [Google Scholar]
- Liu, W.Z.; Li, H.W.; Ma, S.C.; Lu, C.Y.; He, J.; Li, X.Q.; Wei, Z.C.; Xu, Q.M.; Liu, P.; Su, G.L. Parameters analysis and calibration of potato minituber required in EDEM based on the angle of repose of particle stacking test. IAEJ 2018, 27, 1–14. [Google Scholar]
- Shi, L.R.; Wu, J.M.; Sun, W.; Zhang, F.W.; Sun, B.G.; Liu, Q.W.; Zhao, W.Y. Simulation test for metering process of horizontal disc precision metering device based on discrete element method. Trans. Chin. Soc. Agric. Eng. 2014, 30, 40–48. [Google Scholar]
- Shi, L.R.; Zhao, W.Y.; Wu, J.M.; Zhang, F.W.; Sun, W.; Dai, F.; Wang, L.J. Application of slice modeling technology in finite element analysis of agricultural products. J. Chin. Agric. Mech. 2013, 34, 95–98. [Google Scholar]
- Liu, C.L.; Wang, Y.L.; Song, J.N.; Li, Y.N.; Ma, T. Experiment and discrete element model of rice seed based on 3D laser scanning. Trans. Chin. Soc. Agric. Eng. 2016, 32, 294–300. [Google Scholar]
- Yan, H. 3D scanner-based corn seed modeling. Appl. Eng. Agric. 2015, 32, 181–188. [Google Scholar]
- Chen, Z.P.; Carl, W.; Eric, V. Determination of material and interaction properties of maize and wheat kernels for DEM simulation. Biosyst. Eng. 2020, 195, 208–226. [Google Scholar] [CrossRef]
- Lei, X.L.; Liao, Y.T.; Liao, Q.X. Simulation of seed motion in seed feeding device with DEM-CFD coupling approach for rapeseed and wheat. Comput. Electron. Agric. 2016, 131, 29–39. [Google Scholar] [CrossRef]
- Li, H.; Zeng, S.; Luo, X.; Fang, L.; Liang, Z.; Yang, W. Design, DEM simulation, and field experiments of a novel precisionseeder for dry direct-seeded rice with film mulching. Agriculture 2021, 11, 378. [Google Scholar] [CrossRef]
- Zhang, S.; Tekeste, M.Z.; Li, Y.; Gaul, A.; Zhu, D.Q.; Liao, J. Scaled-up rice grain modelling for DEM calibration and the validation of hopper flow. Biosyst. Eng. 2020, 194, 196–212. [Google Scholar] [CrossRef]
- Shi, L.R.; Sun, W.; Zhao, W.Y.; Yang, X.P.; Feng, B. Parameter determination and validation of discrete element model of seed potato mechanical seeding. Trans. Chin. Soc. Agric. Eng. 2018, 34, 35–42. [Google Scholar]
- Xu, L.Z.; Wei, C.; Liang, Z.; Chai, X.Y.; Li, Y.M.; Liu, Q. Development of rapeseed cleaning loss monitoring system and experiments in a combine harvester. Biosyst. Eng. 2019, 178, 118–130. [Google Scholar] [CrossRef]
- Binelo, M.O.; Lima, R.F.; Khatchatourian, O.A.; Stransky, J. Modelling of the drag force of agricultural seeds applied to the discrete element method. Biosyst. Eng. 2019, 178, 168–175. [Google Scholar] [CrossRef]
- Cunha, R.N.; Santos, K.G.; Lima, R.N.; Duarte, C.R.; Barrozo, M.A.S. Repose angle of monoparticles and binary mixture: An experimental and simulation study. Powder Technol. 2016, 303, 203–211. [Google Scholar] [CrossRef]
- Ghodki, B.M.; Kumar, K.C.; Goswami, T.K. Modeling breakage and motion of black pepper seeds in cryogenic mill. Adv. Powder Technol. 2018, 29, 1055–1071. [Google Scholar] [CrossRef]
- Markauskas, D.; Álvaro, R.G.; Kačianauskas, R.; Zdancevičius, E. Maize grain shape approaches for DEM modelling. Comput. Electron. Agric. 2015, 118, 247–258. [Google Scholar] [CrossRef]
- Tekeste, M.Z.; Mousaviraad, M.; Rosentrater, K.A. Discrete Element Model calibration using multi-responses and simulation of corn flow in a commercial grain auger. Trans. ASABE 2018, 61, 1743–1755. [Google Scholar] [CrossRef]
- Liu, F.Y. Discrete Element modeling of the Wheat Particles and Short Straw in Cleaning Devices; Northwest A&F University: Yangling, China, 2018. [Google Scholar]
- Mousaviraad, M.; Tekeste, M.Z.; Rosentrater, K.A. Calibration and validation of a Discrete Element Model of corn using grain flow simulation in a commercial screw grain auger. Trans. ASABE 2017, 60, 1403–1415. [Google Scholar] [CrossRef] [Green Version]
- Shi, L.R.; Ma, Z.T.; Zhao, W.Y.; Yang, X.P.; Sun, B.G.; Zhang, J.P. Calibration of simulation parameters of flaxed seeds using discrete element method and verification of seed-metering test. Trans. Chin. Soc. Agric. Eng. 2019, 35, 25–33. [Google Scholar]
- Wang, D. Design and Simulation of Centralized Centrifugal Precision Seed-Metering System for Rapeseed; Huazhong Agricultural University: Wuhan, China, 2019. [Google Scholar]
- Molenda, M.; Horabik, J. Mechanical Properties of Granular Agro-Materials and Food Powders for Industrial Practice. Part I. Characterization of Mechanical Properties of Particulate Solids for Storage and Handling; Institute of Agrophysics PAS: Lublin, Poland, 2005. [Google Scholar]
- Parafiniuk, P.; Molenda, M.; Horabik, J. Discharge of rapeseeds from a model silo: Physical testing and discrete element method simulations. Comput. Electron. Agric. 2013, 97, 40–46. [Google Scholar] [CrossRef]
- Barrios, G.K.P.; Carvalho, R.M.; Kwade, A.; Tavares, L.M. Contact parameter estimation for DEM simulation of iron ore pellet handling. Powder Technol. 2013, 248, 84–93. [Google Scholar] [CrossRef]
- Elskamp, F.; Kruggel, E.H.; Hennig, M.; Teipel. A strategy to determine DEM parameters for spherical and nonspherical particles. Granul. Matter 2017, 19, 46. [Google Scholar] [CrossRef]
- Shi, L.R.; Zhao, W.Y.; Sun, B.G.; Sun, W. Determination of the coefficient of rolling friction of irregularly shaped maize particles by using discrete element method. Int. J. Agric. Biol. Eng. 2020, 13, 15–25. [Google Scholar] [CrossRef]
- Liu, F.Y.; Zhang, J.; Li, B.; Chen, J. Calibration of parameters of wheat required in discrete element method simulation based on repose angle of particle heap. Trans. Chin. Soc. Agric. Eng. 2016, 32, 247–253. [Google Scholar]
- Hao, J.J.; Long, S.F.; Li, H.; Jia, Y.L.; Ma, Z.K.; Zhao, J.G. Development of Discrete Element Model and calibration of simulation parameters for mechanically-harvested yam. Trans. Chin. Soc. Agric. Eng. 2019, 35, 34–42. [Google Scholar]
- Wu, M.C.; Cong, J.L.; Yan, Q.; Zhu, T.; Peng, X.Y.; Wang, Y.S. Calibration and experiments for discrete element simulation parameters of peanut seed particles. Trans. Chin. Soc. Agric. Eng. 2020, 36, 30–38. [Google Scholar]
- Yu, Q.X.; Liu, Y.; Chen, X.B.; Sun, K.; Lai, Q.H. Calibration and experiment of simulation parameters for panax notoginseng seeds based on DEM. Trans. Chin. Soc. Agric. Mach. 2020, 51, 123–132. [Google Scholar]
- Wojtkowski, M.; Pecen, J.; Horabik, J.; Molenda, M. Rapeseed impact against a flat surface: Physical testing and DEM simulation with two contact models. Powder Technol. 2010, 198, 61–68. [Google Scholar] [CrossRef]
- Liu, F.Y.; Zhang, J.; Chen, J. Construction of visco-elasto-plasticity contact model of vibratory screening and its parameters calibration for wheat. Trans. Chin. Soc. Agric. Eng. 2018, 34, 37–43. [Google Scholar]
- Wang, J. Dynamic Modeling and Simulation Analysis of Seed-Metering Process of a Permanent—Magnet Magnetic Plate Precision Seed-Metering Device; Jiangsu University: Zhenjiang, China, 2012. [Google Scholar]
- Hu, J.P.; Zhou, C.J.; Hou, C.; Wang, J. Simulation analysis of seed-filling performance of magnetic plate seed-metering device by discrete element method. Trans. Chin. Soc. Agric. Mach. 2014, 45, 94–98. [Google Scholar]
- Yu, Y.J.; Yu, J.Y.; Li, Q.L.; Yu, J.Q.; Fu, C. Analysis on the contact interaction between thresher and corn ears based on the DEM. Appl. Mech. Mater. 2013, 246–247, 71–77. [Google Scholar] [CrossRef]
- Yu, Y.J. Research on Analysis Method of Corn Threshing Based on 3D DEM; Jilin University: Changchun, China, 2013. [Google Scholar]
- Yu, Y.J.; Yu, J.Q.; Chen, Z.; Fu, H. Design of 3-D DEM boundary modeling software. Trans. Chin. Soc. Agric. Eng. 2011, 42, 99–103. [Google Scholar]
- Zeng, Z.W.; Ma, X.; Chen, Y.; Qi, L. Modelling residue incorporation of selected chisel ploughing tools using the discrete element method (DEM). Soil Tillage Res. 2020, 197, 104505. [Google Scholar] [CrossRef]
- Shi, Y.Y.; Sun, X.R.; Wang, X.C.; Hu, Z.C.; Newman, D.; Ding, W.M. Numerical simulation and field tests of minimum-tillage planter with straw smashing and strip laying based on EDEM software. Comput. Electron. Agric. 2019, 166, 105021. [Google Scholar] [CrossRef]
- Zeng, Z.W.; Chen, Y. Simulation of straw movement by discrete element modelling of straw-sweep-soil interaction. Biosyst. Eng. 2019, 180, 25–35. [Google Scholar] [CrossRef]
- Huo, L.L.; Tian, Y.S.; Zhao, L.X.; Yao, Z.L.; Hou, S.L.; Meng, H.B. Research on physical property of crop straw and test methods. Renew. Energy Resour. 2011, 29, 86–92. [Google Scholar]
- Zhang, T.; Liu, F.; Zhao, M.Q.; Ma, Q.; Wang, W.; Fan, Q.; Yan, P. Determination of corn stalk contact parameters and calibration of Discrete Element Method simulation. J. China Agric. Univ. 2018, 23, 120–127. [Google Scholar]
- Lenaerts, B.; Aertsen, T.; Tijskens, E.; Ketelaere, B.; Ramon, H.; Baerdemaeker, J.; Saeys, W. Simulation of grain-straw separation by a discrete element approach with bendable straw particles. Comput. Electron. Agric. 2014, 101, 24–33. [Google Scholar] [CrossRef] [Green Version]
- Leblicq, T.; Smeets, B.; Ramon, H.; Saeys, W. A discrete element approach for modelling the compression of crop stems. Comput. Electron. Agric. 2016, 123, 80–88. [Google Scholar] [CrossRef]
- Leblicq, T.; Smeets, B.; Vanmaercke, S.; Ramon, H.; Saeys, W. A discrete element approach for modelling bendable crop stems. Comput. Electron. Agric. 2016, 124, 141–149. [Google Scholar] [CrossRef]
- Schramm, M.; Tekeste, M.Z.; Plouffe, C.; Harby, D. Estimating bond damping and bond Young’s modulus for a flexible wheat straw discrete element method model. Biosyst. Eng. 2019, 186, 349–355. [Google Scholar] [CrossRef]
- Wang, Q.R.; Mao, H.P.; Li, Q.L. Simulation of vibration response of flexible crop stem based on discrete element method. Trans. Chin. Soc. Agric. Mach. 2020, 51, 131–137. [Google Scholar]
- Liu, F.Y.; Zhang, J.; Chen, J. Modeling of flexible wheat straw by discrete element method and its parameters calibration. Int. J. Agric. Biol. Eng. 2018, 11, 42–46. [Google Scholar] [CrossRef] [Green Version]
- Guo, Q. Experimental Research on the Cutting Mechanism and Performance of Rattan Straw; Jiangsu University: Zhengjiang, China, 2016. [Google Scholar]
- Zhang, L.X. Research on the Discrete Element Modeling Method of Corn Stalk’s Mechanical Characteristics; Northwest A&F University: Yangling, China, 2017. [Google Scholar]
- Liao, Y.T.; Liao, Q.X.; Zhou, Y.; Wang, Z.T.; Jiang, Y.J.; Liang, F. Parameters calibration of Discrete Element Model of fodder rape crop harvest in bolting stage. Trans. Chin. Soc. Agric. Mach. 2020, 51, 73–82. [Google Scholar]
- Liao, Y.T.; Wang, Z.T.; Liao, Q.X.; Wan, X.Y.; Zhou, Y.; Liang, F. Calibration of Discrete Element Model parameters of forage rape stalk at early pod stage. Trans. Chin. Soc. Agric. Mach. 2020, 51, 236–243. [Google Scholar]
- Zhang, F.W.; Song, X.F.; Zhang, X.K.; Zhang, F.Q.; Wei, C.J.; Dai, F. Simulation and experiment on mechanical characteristics of kneading and crushing process of corn straw. Trans. Chin. Soc. Agric. Eng. 2019, 35, 58–65. [Google Scholar]
- Sitkei, G. Mechanics of Agricultural Materials; Elsevier Science Pub. Co. Inc.: New York, NY, USA, 1986. [Google Scholar]
- Annoussamy, M.; Richard, G.; Recous, S.; Guerif, J. Change in mechanical properties of wheat straw due to decomposition and moisture. Appl. Eng. Agric. 2000, 16, 657–664. [Google Scholar] [CrossRef]
- Wright, C.; Pryfogle, P.; Stevens, N.; Hess, J.; Ulrich, T. Biomechanics of wheat/barley straw and corn stover. In Twenty-Sixth Symposium on Biotechnology for Fuels and Chemicals; Springer: Berlin/Heidelberg, Germany, 2005; Volume 121, pp. 5–19. [Google Scholar]
- Liu, C.L.; Wei, D.; Song, J.N.; Li, Y.N.; Du, X.; Zhang, F.Y. Systematic study on boundary parameters of Discrete Element Simulation of granular fertilizer. Trans. Chin. Soc. Agric. Mach. 2018, 49, 82–89. [Google Scholar]
- Wen, X.Y.; Jia, H.L.; Zhang, S.W.; Yuan, H.F.; Wang, G.; Chen, T.Y. Test of suspension velocity of granular fertilizer based on Edem-Fluent coupling. Trans. Chin. Soc. Agric. Mach. 2020, 51, 69–77. [Google Scholar]
- Wen, X.Y.; Yuan, H.F.; Wang, G.; Jia, H.L. Calibration method of friction coefficient of granular fertilizer by discrete element simulation. Trans. Chin. Soc. Agric. Mach. 2020, 51, 115–122. [Google Scholar]
- Yuan, J.; Xin, C.B.; Niu, Z.R.; Li, Y.; Liu, X.H.; Xin, S.; Wang, J.F.; Wang, L.H. Discrete element model simulation and verification of fertilizer blending uniformity of variable rate fertilization based on relevance vector machine. Trans. Chin. Soc. Agric. Eng. 2019, 35, 37–45. [Google Scholar]
- Peng, F.; Wang, H.Y.; Fang, F.; Liu, Y.D. Calibration of Discrete Element Model parameters for pellet feed based on injected section method. Trans. Chin. Soc. Agric. Mach. 2018, 49, 140–147. [Google Scholar]
- Luo, S.; Yuan, Q.X.; Gouda, S.; Yang, L.Y. Parameters calibration of vermicomposting nursery substrate with discrete element method based on jkr contact model. Trans. Chin. Soc. Agric. Mach. 2018, 49, 343–350. [Google Scholar]
- Peng, C.W.; Xu, D.J.; He, X.; Tang, Y.H.; Sun, S.L. Parameter calibration of discrete element simulation model for pig manure organic fertilizer treated with Hermetia illucen. Trans. Chin. Soc. Agric. Eng. 2020, 36, 212–218. [Google Scholar]
- Coetzee, C.J.; Lombard, S.G. The destemming of grapes: Experiments and discrete element modelling. Biosyst. Eng. 2013, 114, 232–248. [Google Scholar] [CrossRef]
- Fang, H.M.; Ji, C.Y.; Zhang, Q.Y.; Guo, J. Force analysis of rotary blade based on distinct element method. Trans. Chin. Soc. Agric. Eng. 2016, 32, 54–59. [Google Scholar]
- Xiong, P.Y.; Yang, Z.; Sun, Z.Q.; Zhang, Q.Q.; Huang, Y.Q.; Zhang, Z.W. Simulation analysis and experiment for three-axis working resistances of rotary blade based on discrete element method. Trans. Chin. Soc. Agric. Eng. 2018, 34, 113–121. [Google Scholar]
- Zhu, X.M. The study on the power consumption of a rotary tiller in rototilling. J. Anhui Inst. Technol. 1986, 5, 121–133. [Google Scholar]
- Zhao, H.B.; He, J.; Li, H.W.; Ma, S.C.; He, J.; Wang, Q.J.; Lu, C.Y.; Zheng, Z.Q.; Zhang, C. The effect of various edge-curve types of plain-straight blades for strip tillage seeding on torque and soil disturbance using DEM. Soil Tillage Res. 2020, 202, 104674. [Google Scholar] [CrossRef]
- Lee, K.S.; Park, S.H.; Park, W.Y.; Lee, C. Strip tillage characteristics of rotary tiller blades for use in a dryland direct rice seeder. Soil Tillage Res. 2003, 71, 25–32. [Google Scholar] [CrossRef]
- Marenya, M.O. Performance characteristics of a deep tilling rotavator. Jpn. J. Appl. Phys. Suppl. 2010, 21, 209–212. [Google Scholar]
- Matin, M.A.; Fielke, J.M.; Desbiolles, J.M.A. Torque and energy characteristics for strip-tillage cultivation when cutting furrows using three designs of rotary blade. Biosyst. Eng. 2015, 129, 329–340. [Google Scholar] [CrossRef]
- Zheng, K.; He, J.; Li, H.W.; Chen, L.Q.; Hu, H.N.; Liu, W.Z. Influence of working order on working quality and power consumption of subsoiling and rotary tillage combined machine. Trans. Chin. Soc. Agric. Eng. 2017, 33, 52–60. [Google Scholar]
- Zhao, H.B. Study on Driven Seedbed-Cleaning and Anti-Blocking Device of Residue Inter-Row Side-Throwing for Minimum till Wheat Seeding; China Agricultural University: Beijing, China, 2019. [Google Scholar]
- Huang, Y.X.; Hang, C.G.; Yuan, M.C.; Wang, B.T.; Zhu, R.X. Discrete Element Simulation and experiment on disturbance behavior of subsoiling. Trans. Chin. Soc. Agric. Mach. 2016, 47, 80–88. [Google Scholar]
- Hang, C.G.; Gao, X.J.; Yuan, M.C.; Huang, Y.X.; Zhu, R.X. Discrete element simulations and experiments of soil disturbance as affected by the tine spacing of subsoiler. Biosyst. Eng. 2018, 168, 73–82. [Google Scholar] [CrossRef]
- Hang, C.G.; Huang, Y.X.; Zhu, R.X. Analysis of the movement behaviour of soil between subsoilers based on the discrete element method. J. Terramech. 2017, 74, 35–43. [Google Scholar] [CrossRef]
- Li, B.; Chen, Y.; Chen, J. Comparison of two subsoiler designs using the discrete element method (DEM). Trans. ASABE 2018, 61, 1529–1537. [Google Scholar] [CrossRef]
- Wang, X.Z.; Yue, B.; Gao, X.J.; Zheng, Z.Q.; Zhu, R.Q.; Huang, Y.X. Discrete Element simulations and experiments of disturbance behavior as affected by mounting height of subsoiler’s wing. Trans. Chin. Soc. Agric. Mach. 2018, 49, 124–136. [Google Scholar]
- Sun, J.Y.; Wang, Y.M.; Ma, Y.H.; Tong, J.; Zhang, Z.J. DEM simulation of bionic subsoilers (tillage depth > 40 cm) with drag reduction and lower soil disturbance characteristics. Adv. Eng. Softw. 2018, 119, 30–37. [Google Scholar] [CrossRef]
- Wang, J.Y. Design and Experiment of Subsoiler-Stubble Chopper Device in No-Tillage; Northeast Agricultural University: Haerbin, China, 2019. [Google Scholar]
- Ma, Y.J.; Wang, A.; Zhao, J.G.; Hao, J.J.; Li, C.J.; Ma, L.P.; Zhao, F.W.; Wu, Y. Simulation analysis and experiment of drag reduction effect of convex blade subsoiler based on discrete element method. Trans. Chin. Soc. Agric. Eng. 2019, 35, 16–23. [Google Scholar]
- Wang, Y.X.; Zhang, D.X.; Yang, L.; Cui, T.; Zhong, X. Modeling the interaction of soil and a vibrating subsoiler using the discrete element method. Comput. Electron. Agric. 2020, 174, 0168–1699. [Google Scholar] [CrossRef]
- Saunders, C.; Ucgul, M.; Godwin, R.J. Discrete element method (DEM) simulation to improve performance of a mouldboard skimmer. Soil Tillage Res. 2021, 205, 104764. [Google Scholar] [CrossRef]
- Cheng, Y.M. The Ridging Performance Analysis & Optimization of Ridging Device of Potato Cultivator; Xihua University: Chengdu, China, 2017. [Google Scholar]
- Liu, X. Design and Experiment of Cultivator Ridging Mechanism and Resistance Test Mount Device; Jilin University: Changchun, China, 2020. [Google Scholar]
- Khot, L.R.; Salokhe, V.M.; Jayasuriya, H.P.W.; Nakashima, H. Experimental validation of distinct element simulation for dynamic wheel-soil interaction. J. Terramech. 2007, 44, 429–437. [Google Scholar] [CrossRef]
- Chen, J.Q. Design and Experiment of Press Roller with Bionic Convex Structure; Northeast Agricultural University: Haerbin, China, 2018. [Google Scholar]
- Söhne, W. Druckverteilung im boden und bodenverformung unter schlepperreifen. Grundl. Landtech. -Konstr. 1953, 5, 49–63. [Google Scholar]
- Lamandé, M.; Schjønning, P. Soil mechanical stresses in high wheel load agricultural field traffic: A case study. Soil Res. 2018, 56, 129–135. [Google Scholar] [CrossRef]
- Pue, J.D.; Lamandé, M.; Schjønning, P.; Cornelis, W.M. DEM simulation of stress transmission under agricultural traffic Part 3: Evaluation with field experiment. Soil Tillage Res. 2020, 200, 104606. [Google Scholar] [CrossRef]
- Du, Y.H.; Gao, J.W.; Jiang, L.; Jiang, L.H.; Zhang, Y.C. Numerical analysis on tractive performance of off-road wheel steering on sand using discrete element method. J. Terramech. 2017, 71, 25–43. [Google Scholar] [CrossRef]
- Zhao, C.L.; Zang, M.Y. Application of the FEM/DEM and alternately moving road method to the simulation of tire-sand interactions. J. Terramech. 2017, 72, 27–38. [Google Scholar] [CrossRef]
- Nishiyama, K.; Nakashima, H.; Yoshida, T.; Shimizu, H.; Miyasaka, J.; Ohdoi, K. FE-DEM with interchangeable modeling for off-road tire traction analysis. J. Terramech. 2018, 78, 15–25. [Google Scholar] [CrossRef]
- Nakanishi, R.; Nakashima, H.; Miyasaka, J.; Ohdoi, K. Tractive performance analysis of a lugged wheel by open-source 3D DEM software. J. Terramech. 2020, 92, 51–65. [Google Scholar] [CrossRef]
- Zeng, H.Y.; Xu, W.; Zang, M.Y.; Yang, P.; Guo, X.B. Calibration and validation of DEM-FEM model parameters using upscaled particles based on physical experiments and simulations. Adv. Powder Technol. 2020, 31, 3947–3959. [Google Scholar] [CrossRef]
- Wang, Y.M.; Xue, W.L.; Ma, Y.H.; Tong, J.; Liu, X.P.; Sun, J.Y. DEM and soil bin study on a biomimetic disc furrow opener. Comput. Electron. Agric. 2019, 156, 209–216. [Google Scholar] [CrossRef]
- Li, B.; Chen, Y.; Chen, J. Modeling of soil-claw interaction using the discrete element method (DEM). Soil Tillage Res. 2016, 158, 177–185. [Google Scholar] [CrossRef]
- Barr, J.B.; Ucgul, M.; Desbiolles, J.M.A.; Fielke, J.M. Simulating the effect of rake angle on narrow opener performance with the discrete element method. Biosyst. Eng. 2018, 171, 1–15. [Google Scholar] [CrossRef]
- Ucgul, M.; Fielke, J.M.; Saunders, C. Defining the effect of sweep tillage tool cutting edge geometry on tillage forces using 3D discrete element modelling. Inf. Process. Agric. 2015, 2, 130–141. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.S.; Liao, Q.X.; Ji, W.F.; Liu, H.B.; Zhou, Y.; Xiao, W.L. Surface optimization and experiment on ditch plow of direct rapeseed seeder. Trans. Chin. Soc. Agric. Mach. 2015, 46, 53–59. [Google Scholar]
- Liu, X.P.; Zhang, Q.S.; Liu, L.C.; Wei, G.L.; Xiao, W.L.; Liao, Q.X. Surface optimization of ship type ditching system based on differential geometry and edem simulation. Trans. Chin. Soc. Agric. Mach. 2019, 50, 59–69. [Google Scholar]
- Shi, S.; Zhang, D.X.; Yang, L.; Cui, T.; Li, K.H.; Yin, X.W. Simulation and verification of seed-filling performance of pneumatic-combined holes maize precision seed-metering device based on EDEM. Trans. Chin. Soc. Agric. Eng. 2015, 31, 62–69. [Google Scholar]
- Yu, J.Q.; Shen, Y.F.; Niu, X.T.; Fu, H.; Ni, T.H. DEM simulation and analysis of the clearing process in precision metering device with combination inner-cell. Trans. CSAE 2008, 24, 105–109. [Google Scholar]
- Zhang, T.; Liu, F.; Zhao, M.Q.; Liu, Y.Q.; Li, F.; Chen, C. Movement law of maize population in seed room of seed metering device based on discrete element method. Trans. Chin. Soc. Agric. Eng. 2016, 32, 27–35. [Google Scholar]
- Tian, L.Q. Mechanism Analysis and Experimental Study on the Rice Seed Sowing Device with Ejection Ear Spoon Type; Northeast Agricultural University: Harbin, China, 2017. [Google Scholar]
- Lei, X.L.; Yang, W.H.; Yang, L.J.; Liu, L.Y.; Liao, Q.X.; Ren, W.J. Design and experiment of seed hill-seeding centralized metering device for rapeseed. Trans. Chin. Soc. Agric. Mach. 2020, 51, 54–64. [Google Scholar]
- Hou, J.L.; Wang, H.X.; Niu, Z.R.; Xi, R.; Li, T.H. Discrete element simulation and experiment of picking and clearing performance of garlic seed-picking device. Trans. Chin. Soc. Agric. Eng. 2019, 35, 48–57. [Google Scholar]
- Lei, X.L.; Liao, Y.T.; Wang, L.; Wang, D.; Yao, L.; Liao, Q.X. Simulation of gas-solid two-phase flow and parameter optimization of pressurized tube of air-assisted centralized metering device for rapeseed and wheat. Trans. Chin. Soc. Agric. Eng. 2017, 33, 67–75. [Google Scholar]
- Han, D.D.; Zhang, D.X.; Yang, L.; Cui, T.; Ding, Y.Q.; Dian, X.H. Optimization and experiment of inside-filling air-blowing seed metering device based on EDEM-CFD. Trans. Chin. Soc. Agric. Mach. 2017, 48, 43–51. [Google Scholar]
- Liu, Y.Q.; Zhao, M.Q.; Liu, F.; Yang, T.J.; Zhang, T.; Li, F.L. Simulation and optimization of working parameters of air suction metering device based on discrete element. Trans. Chin. Soc. Agric. Mach. 2016, 47, 65–73. [Google Scholar]
- Shi, S.; Liu, H.; Wei, G.J.; Zhou, J.L.; Jian, S.Q.; Zhang, R.F. Optimization and experiment of pneumatic seed metering device with guided assistant filling based on EDEM-CFD. Trans. Chin. Soc. Agric. Mach. 2020, 51, 54–66. [Google Scholar]
- Liu, C.L.; Li, Y.N.; Song, J.N.; Ma, T.; Wang, M.M.; Wang, X.J.; Zhang, C. Performance analysis and experiment on fertilizer spreader with centrifugal swing disk based on EDEM. Trans. Chin. Soc. Agric. Eng. 2017, 33, 32–39. [Google Scholar]
- Zha, X.; Zhang, G.; Han, Y.; Salem, A.E.; Fu, J.; Zhou, Y. Structural optimization and performance evaluation of blocking wheel-type screw fertilizer distributor. Agriculture 2021, 11, 248. [Google Scholar] [CrossRef]
- Gao, G.B. Design and Experiment of Key Parts of Side-Depth Fertilizer Device with Pneumatic Conveying for Paddy; Northeast Agricultural University: Harbin, China, 2019. [Google Scholar]
- Liu, Z.D.; Wang, Q.J.; Li, H.W.; He, J.; Lu, C.Y.; Yu, C.C. Fertilizer injecting route analysis and test for air-blowing seed-fertilizer hole-applicator via CFD-DEM coupling. Trans. Chin. Soc. Agric. Eng. 2019, 35, 18–25. [Google Scholar]
- Zhou, H.B.; Chen, Y.; Sadek, M.A. Modelling of soil-seed contact using the Discrete Element Method (DEM). Biosyst. Eng. 2014, 121, 56–66. [Google Scholar] [CrossRef]
- Wang, W.Z.; Liu, W.R.; Yuan, L.H.; Qu, Z.; He, X.; Lv, Y.L. Simulation and experiment of single longitudinal axial material movement and establishment of wheat plants model. Trans. Chin. Soc. Agric. Mach. 2020, 51, 170–180. [Google Scholar]
- Wang, Q.R.; Mao, H.P.; Li, Q.L. Modelling and simulation of the grain threshing process based on the discrete element method. Comput. Electron. Agric. 2020, 178, 105790. [Google Scholar] [CrossRef]
- Mou, X.D.; Jiang, H.X.; Sun, Y.C.; Xu, H.G.; Yao, Y.C.; Geng, D.Y. Simulation optimization and experiment of disc-type grain crushing device of silage corn harvester. Trans. Chin. Soc. Agric. Mach. 2020, 51, 218–226. [Google Scholar]
- Li, H.C.; Li, Y.M.; Tang, Z.; Xu, L.Z.; Zhao, Z. Numerical simulation and analysis of vibration screening based on EDEM. Trans. Chin. Soc. Agric. Eng. 2011, 27, 117–121. [Google Scholar]
- Wang, C.J.; Liu, Q.; Ma, L.Z.; Li, L. Cottonseed particle motion Law in 3-DOF hybrid vibration screen surface. Trans. Chin. Soc. Agric. Eng. 2015, 31, 49–56. [Google Scholar]
- Han, M. Study on the Maize Threshing and Cleaning Mechanism with Low Loss and Anti-Blocking and Its Linkage Control; Jiangsu University: Zhengjiang, China, 2020. [Google Scholar]
- Ma, Z.; Li, Y.M.; Xu, L.Z. Discrete-element method simulation of agricultural particles’ motion in variable-amplitude screen box. Comput. Electron. Agric. 2015, 118, 92–99. [Google Scholar] [CrossRef]
- Li, H.C.; Li, Y.M.; Fang, G.; Zhao, Z.; Xu, L.Z. CFD–DEM simulation of material motion in air-and-screen cleaning device. Comput. Electron. Agric. 2012, 88, 111–119. [Google Scholar] [CrossRef]
- Xu, L.Z.; Li, Y.; Chai, X.Y.; Wang, G.M.; Liang, Z.W.; Li, Y.M.; Li, B.J. Numerical simulation of gas-solid two-phase flow to predict the cleaning performance of rice combine harvesters. Biosyst. Eng. 2020, 190, 11–24. [Google Scholar] [CrossRef]
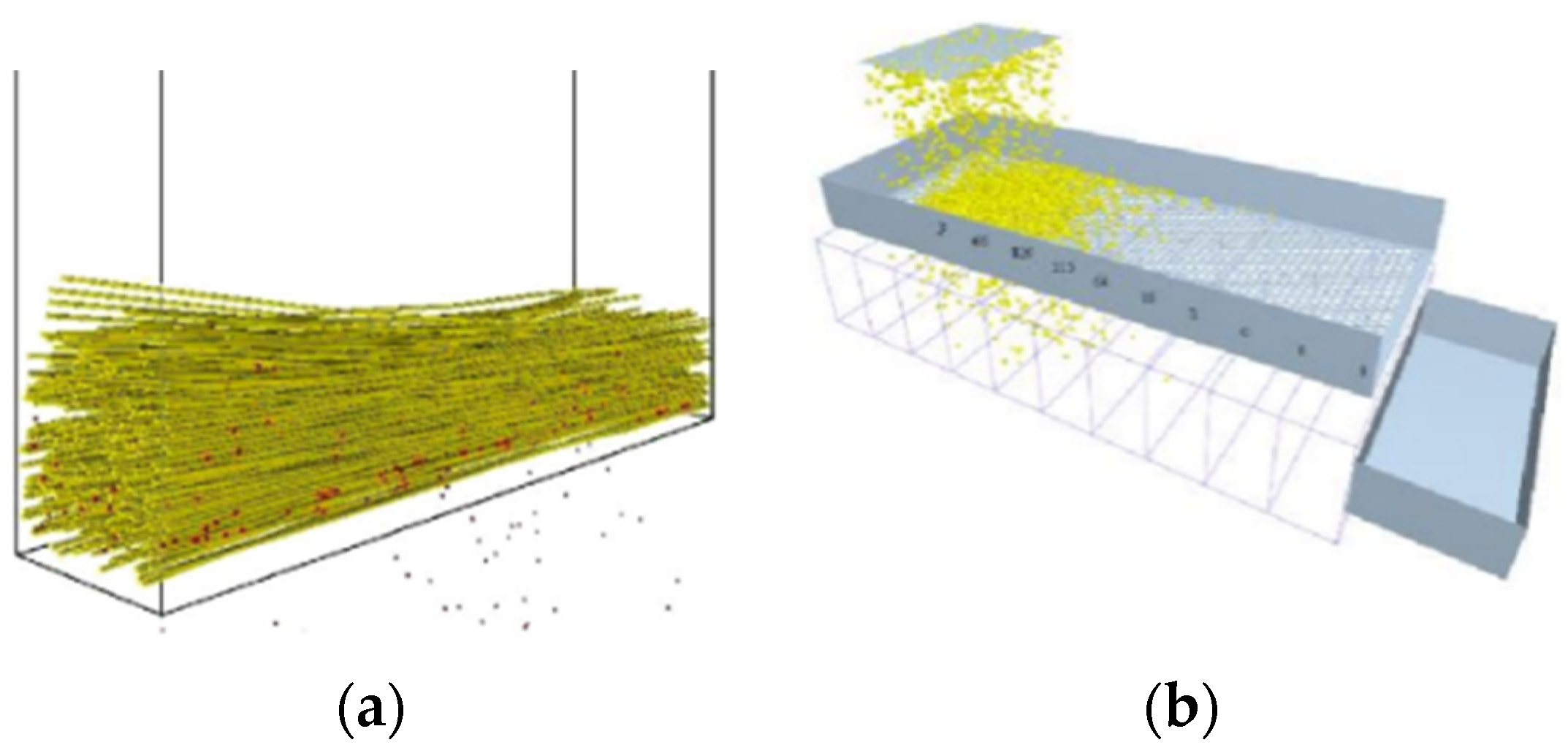
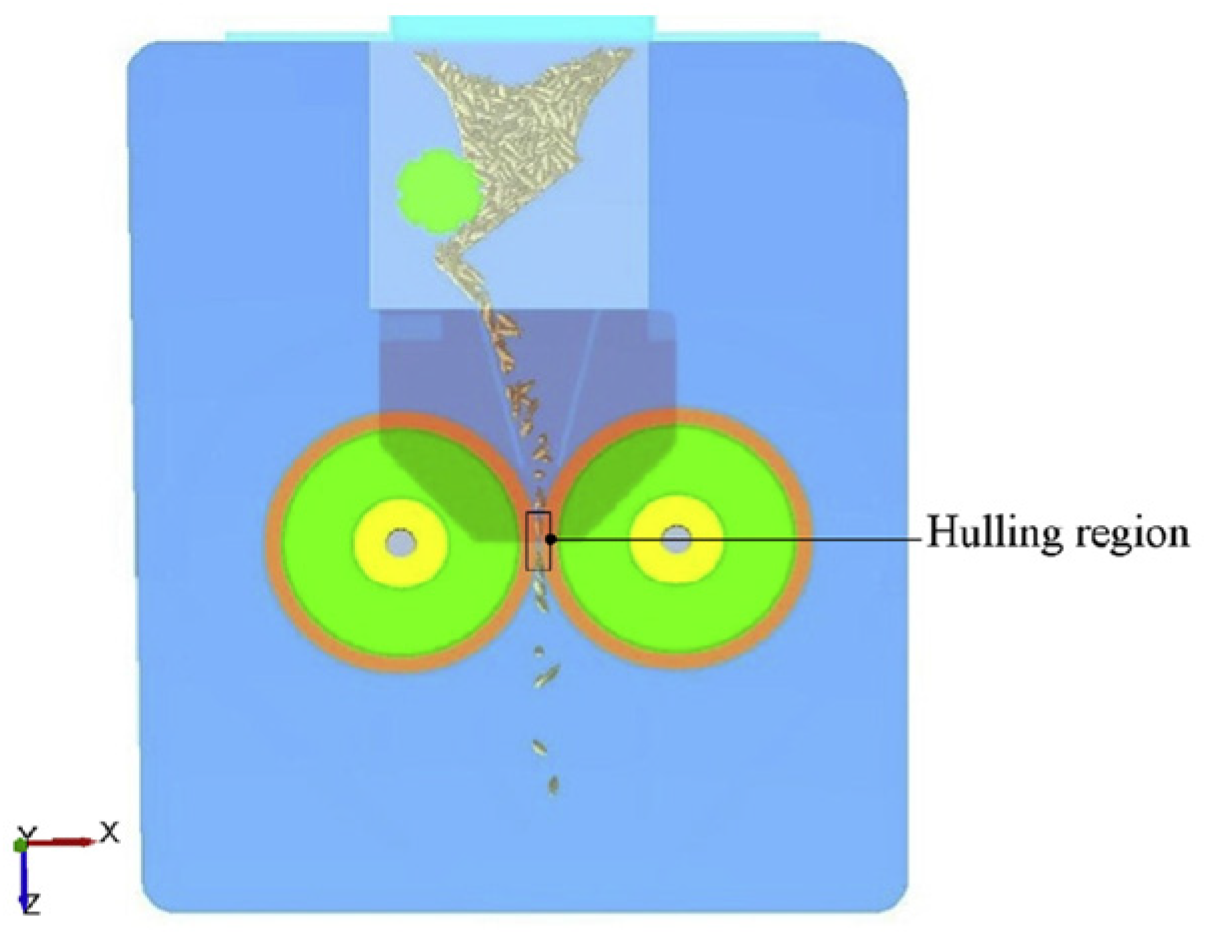
- Chen, P.Y.; Jia, F.G.; Liu, H.R.; Han, Y.L.; Zeng, Y.; Meng, X.Y. Effects of feeding direction on the hulling of paddy grain in a rubber roll huller. Biosyst. Eng. 2019, 183, 196–208. [Google Scholar] [CrossRef]
- Chen, P.Y.; Han, Y.L.; Jia, F.G.; Meng, X.Y.; Xiao, Y.W.; Bai, S.G. DEM simulations and experiments investigating the influence of feeding plate angle in a rubber-roll paddy grain huller. Biosyst. Eng. 2021, 201, 23–41. [Google Scholar] [CrossRef]
- Wang, Z.Y.; Yuan, F.L.; Wang, F.C.; Sun, H.N. Simulation test of returning performance of returning device for fully enclosed belt conveyor. China Oils Fats 2020, 45, 112–118. [Google Scholar]
- Cleary, P.W.; Sawley, M.L. DEM modelling of industrial granular flows: 3D case studies and the effect of particle shape on hopper discharge. Appl. Math. Model. 2002, 26, 89–111. [Google Scholar] [CrossRef]
- Kobylka, R.; Horabik, J.; Molend, M. Development of a rarefaction wave at discharge initiation in a storage silo: DEM simulations. Particuology 2018, 36, 37–49. [Google Scholar] [CrossRef]
- Zaki, M.; Siraj, M.S. Study of a flat-bottomed cylindrical silo with different orifice shapes. Powder Technol. 2019, 354, 641–652. [Google Scholar] [CrossRef]
- Horabik, J.; Parafiniuk, P.; Molenda, M. Stress profile in bulk of seeds in a shallow model silo as influenced by mobilisation of particle-particle and particle-wall friction: Experiments and DEM simulations. Powder Technol. 2018, 327, 320–334. [Google Scholar] [CrossRef]
- Kannan, A.S.; Lassen, N.C.K.; Carstensen, J.M.; Lund, J.; Sasic, S. Segregation phenomena in gravity separators: A combined numerical and experimental study. Powder Technol. 2016, 301, 679–693. [Google Scholar] [CrossRef]
- Kannan, A.S.; Jareteg, K.; Lassen, N.C.K.; Carstensen, J.M.; Hansen, M.A.E.; Dam, D.; Sasic, S. Design and performance optimization of gravity tables using a combined CFD-DEM framework. Powder Technol. 2017, 318, 423–440. [Google Scholar] [CrossRef]
- Meng, X.Y.; Jia, F.G.; Qiu, H.L.; Han, Y.L.; Zeng, Y.; Xiao, Y.W.; Chen, P.Y. DEM study of white rice separation in an indented cylinder separator. Powder Technol. 2019, 348, 1–12. [Google Scholar] [CrossRef]














| Straw Type | Straw Model | Specialty | Contact Parameters | Constitutive Parameters |
|---|---|---|---|---|
| Oat straw |  [104] | Rigid | Friction coefficient between straw and blade [104] | Straw stiffness [104] |
| Maize straw |  [117] | Cuttable | Normal and shear contact stiffness, in normal and shear critical stress [117] | |
| Fodder rape straw in bolting stage |  Simulation Experiment [115] | Collision coefficient of restitution between straw and between straw and steel; static and rolling coefficient between straw and between straw and steel [115] | Normal and shear stiffness; normal and shear critical stress; bond radius [115] | |
| Fodder rape straw in early pod stage |  [116] | Collision coefficient of restitution between straw and between straw and steel; static and rolling coefficient between straw and between straw and steel [116] | Elasticity modulus, shearing modulus and Poisson’s ratio [116] | |
| Wheat straw |  [110] | Flexible | Viscous damping coefficient [110] | Young’s modulus [110] |
 Experiment Simulation [109] | Friction coefficient between straw, Friction coefficient between straw and steel [118] | Young’s modulus [118,120] Bending strength [108] Tension modulus [120] | ||
 [112] | Static friction coefficient between straw and steel, restitution coefficient [112] | Shearing modulus; elasticity modulus Bond radius, shear and normal cohesion stiffness [112] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, H.; Huang, Y.; Liu, Z.; Liu, W.; Zheng, Z. Applications of Discrete Element Method in the Research of Agricultural Machinery: A Review. Agriculture 2021, 11, 425. https://doi.org/10.3390/agriculture11050425
Zhao H, Huang Y, Liu Z, Liu W, Zheng Z. Applications of Discrete Element Method in the Research of Agricultural Machinery: A Review. Agriculture. 2021; 11(5):425. https://doi.org/10.3390/agriculture11050425
Chicago/Turabian StyleZhao, Hongbo, Yuxiang Huang, Zhengdao Liu, Wenzheng Liu, and Zhiqi Zheng. 2021. "Applications of Discrete Element Method in the Research of Agricultural Machinery: A Review" Agriculture 11, no. 5: 425. https://doi.org/10.3390/agriculture11050425
APA StyleZhao, H., Huang, Y., Liu, Z., Liu, W., & Zheng, Z. (2021). Applications of Discrete Element Method in the Research of Agricultural Machinery: A Review. Agriculture, 11(5), 425. https://doi.org/10.3390/agriculture11050425