1. Introduction
1.1. Weeds in Sugar Beet Production
Weeds are one of the main problems in crop production because they compete with major field crops for vital resources such as water, nutrients, space, and light [
1,
2,
3,
4]. As a result of this competition, the yield is significantly reduced, its quality deteriorates, and it is harder to harvest. Depending on the crops, weeds can reduce crop productivity by up to 40% [
5,
6,
7,
8].
The most common annual weed species in sugar beet crops in Lithuania are
Chenopodium album,
Sinapis arvensis,
Echinochloa crus galli,
Stellaria media, and perennial weed species dominates by
Taraxacum officinalis,
Elytrigia repens, and
Plantago major [
9].
Sugar beet is particularly sensitive to weed competition, which can reduce the yield of sugar beet roots by 26 to 100% [
2,
4,
10,
11,
12,
13,
14,
15], even at low weed density of five weeds per 1 m
2 [
16,
17]. Therefore, weed control is very important and can significantly increase the yield of sugar beet [
11,
18]. Although organic farms tend to require more labor and investment, organic farming is becoming increasingly more popular across the EU, with the main countries growing organic beets being Germany (52% of the European organic farmland) and Austria (23%) [
19]. Sugar beet is also an important crop in local Lithuanian industry as the main raw material for white sugar.
The problem of weeds is particularly relevant in organic crops, where the yield is already 25–50% lower compared to traditional farming [
1]. Detailed literature analysis by Seufert et al. [
20], comparing the yield data from ecological and traditional practices, showed that the yield of organic plants is generally lower, ranging from 5 to 34% of traditional system yields. Therefore, the weed control method chosen, and good farm management practice, have a huge impact not only on crop productivity and its quality but also on the impact on the environment.
1.2. Ecological Weed Control Methods
The conventional method of weed control using chemical herbicides is not acceptable in organic farming practices. Therefore, mechanical weed control is an alternative to chemical weed control [
2,
4,
21,
22]. In addition, chemical weed control is not only expensive but also has a negative impact on the environment [
11]. Weed control based on chemical treatment has increased costs and made some weeds resistant to herbicides [
23]. Mechanical weed control removes weeds physically by eradicating them, i.e., by shredding all plants or by separating weed stems and leaves from their roots [
2,
15]. The scientific literature presents a variety of positive and negative results from studies related to mechanical weed control [
24]. Kunz et al. [
17] found that mechanical inter-row loosening alone or in combination with herbicides results in a similar sugar beet yield to conventional spraying.
Mulching is another method of weed control that can also be used in organic crops. Plant mulch residues on the soil surface alter the physical and chemical environment of weed seeds, thereby inhibiting weed germination and growth. As an alternative to mechanical weed control, thermal weed control with heat, electricity, flame, hot water, and foam can be used [
4,
25]. The work of Kunz [
26] revealed that the use of a living mulch in sugar beet production can reduce the amount of herbicide by up to 65% and the number of weeds by up to 83%.
Often, a mechanical method of weed control requires large investments in energy, labor, and time, and its speed and accuracy are limited by a lack of staff skills and experience [
27]. In some cases, a mechanical method of weed control alone may not be enough, as such a method is not always able to eradicate weeds growing very close to sugar beet. In such cases, a manual weed control method is often still used. Due to the potential risk of crop damage, especially when weed control is performed in crop row between the plants, it is necessary to use precise mechanical tools [
28,
29]. Accurate position control of implements or tools based on digital technologies such as various types of cameras (RGB, hyperspectral, multispectral, etc.), sensors, RTK-GPS, and machine learning [
4,
14,
18,
24,
30,
31,
32,
33] provide the ability to control weeds in crop rows close to plants without damaging the crop. These technologies allow not only the control of weeds in a specific field location in real time, but also the very accurate classification of crop plants and weeds. Automated precise weed control by self-propelled robots has been rapidly evolving and has become one of the key areas of agricultural robotics research over the past decade [
18,
32,
34,
35,
36,
37,
38,
39]. Kunz et al. [
14] evaluated camera-steered mechanical weed control and found that such an approach improved the mechanical efficiency of weed control in sugar beet, maize, and soybean crops. Automated inter-row weeding controlled by cameras killed 78% of weeds, while manual control killed only 65%. Automated steering with the help of visual cameras allows the operator not only to direct the cultivator’s working parts closer to the main crop rows, but also to increase the driving speed from 4 km h
−1 in manual steering to 7–10 km h
−1 with automated steering. Automated and robotic techniques facilitate the operator’s work, reduce labor time costs, and increase the efficiency of mechanical weeding compared to conventional weed control methods [
17]. In addition, the smaller dimensions and weights of robots compared to traditional heavy tractors result in lower soil compaction [
38,
39,
40].
1.3. Energy Use and GHG Emissions
Sustainable development requires management of energy use and greenhouse gas (GHG) emissions in all production processes [
41]. Haciseferogullari et al. [
42] examined the energy balance of sugar beet production and found that the total energy input, total energy output, output/input ratio, and net energy consumed in chemical production were 19,760 MJ ha
−1, 378,491 MJ ha
−1, 19.15, and 18.15, respectively. Meanwhile, Yousefi et al. [
43] showed that, for sugar beet growing in Western Iran, the total input and output was 49517 and 1,095,360 MJ ha
−1, respectively. The calculated energy use efficiency was 22.12 and the carbon efficiency ratio of sugar beet was 10.95. Dimitrijevic et al. [
44] estimated the energy efficiency of sugar beet production and found that 0.93 MJ kg
−1 of energy was needed to produce one kilogram of product. The results of Šarauskis et al. [
45] showed that energy consumption could be 10 to 70% lower in organic farming compared to conventional farming practices.
Agriculture makes a significant contribution to GHG emissions, with as much as 24% of total net GHG emissions coming from Agriculture, Forestry, and Other Land Use (AFOLU) [
46]. Tzilivakis et al. [
47] estimated energy consumption and GHG emissions from sugar beet production in the UK and reported that the average global warming potential (GWP) per ton of sugar beet grown was 0.024 tons of CO
2 t
−1. Pishgar-Komleh et al. [
41] estimated that the total GHG emissions from cucumber production were 82724 kg CO
2eq ha
−1, with the highest emissions from diesel (61%), electricity (19%), and manure (14%). Organic crop production is associated with lower average GHG emissions per hectare than conventional farming [
19,
47].
Substantial research can be found in the scientific literature, providing indicators of energy and GHG emissions from different crops. However, no research demonstrating an analysis of energy use and GHG emissions in organic sugar beet production, investigating different weed control methods involving robots, has been found. Therefore, the aim of this study is to analyze, evaluate, and compare the impact of conventional as well as robotic weed control methods regarding the energy and environmental performance in organic sugar beet production. Mechanical and thermal weed control methods were performed in field experiments, and automated and robotic weed control systems were calculated analytically.
2. Materials and Methods
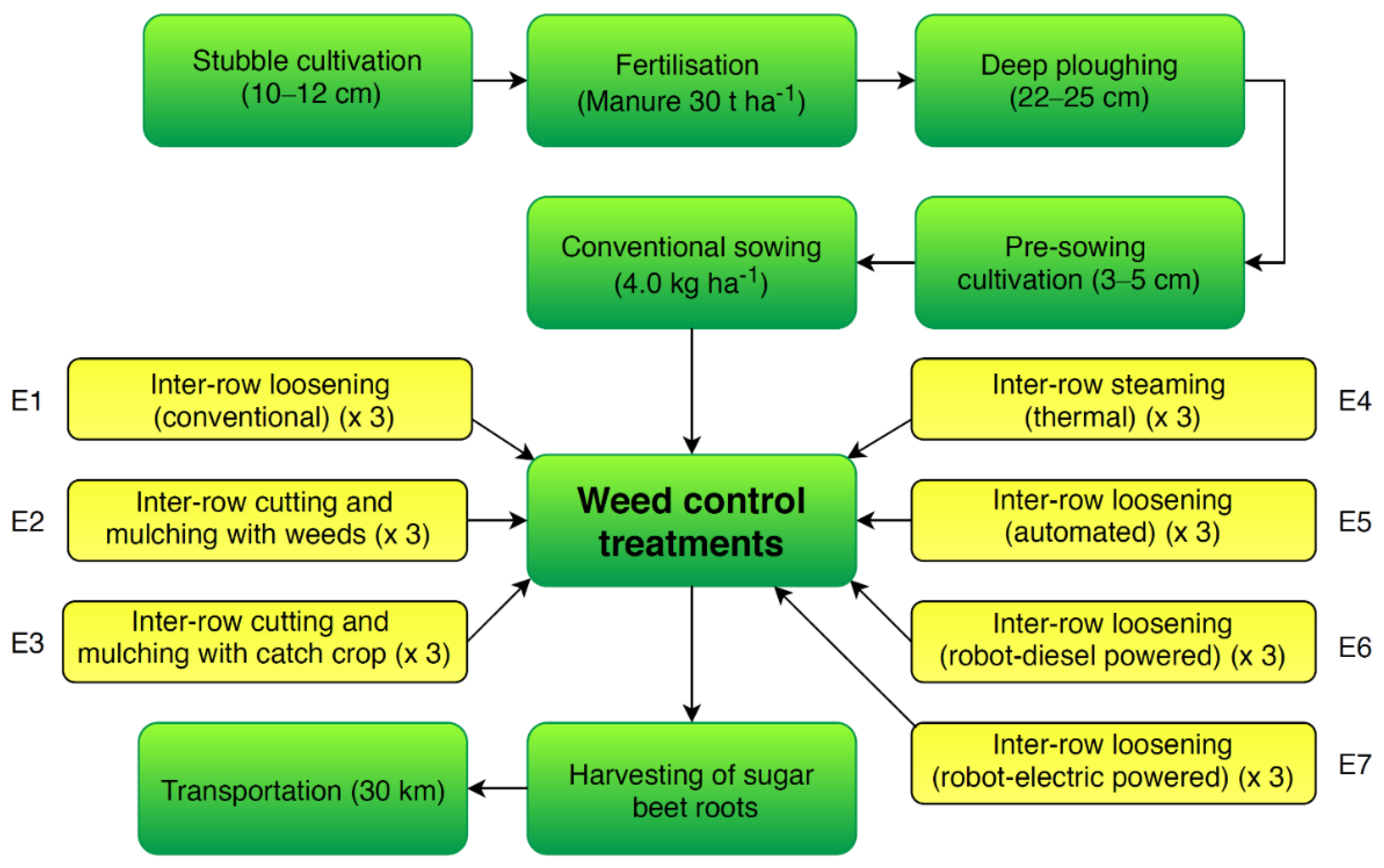
2.1. Description of Weed Control Methods
This study examines seven different weed control methods in organic sugar beet crops. The baseline data needed for this study concerning four non-automated weed control methods—inter-row loosening (E1), inter-row cutting and mulching with weeds (E2), inter-row cutting and mulching with catch crop (E3), and inter-row steaming (E4)—were obtained after experimental research at the Experimental Station of Vytautas Magnus University in 2015–2017. To avoid repetition, the location and conditions of the research are described in detail in Romaneckas et al. [
48]. The other three weed control methods for comparative analysis—automated inter-row loosening with cameras for row-tracking (E5), inter-row loosening with a diesel-powered robot (E6), and inter-row loosening with a solar-powered robot (E7) (
Figure 1)—were based on analytical theoretical methods. All weed control treatments were performed three times per season.
The electric robot (E7) is designed for weed control and sowing of crops sown in wide rows. The robot operates fully automatically using highly accurate GPS technology and is independent of cameras or sensors to detect plants and weeds. Because the robot knows the position of each seed, it can start weeding at a very early stage—before the crop begins to germinate. Robots using camera systems that need to recognize crops and weeds do not have this capability. Three weeding wires in each row ensure weed removal between rows. Weed control in rows between crops is performed by a weeding arm. The electric motor pulls its weeding arm in and out of the row [
49]. The diesel-powered robot (E6) controls weeds by recognizing them with the help of cameras. Such systems use weed detection algorithms and generate weed maps.
The technical data of the automated inter-row loosening (E5) machine were taken from the manufacturer’s specification, and the working speed (7.2 km h
−1) was selected based on the results of tests performed by Kunz et al. [
17]. One of the robots used to control weeds was powered by a diesel engine [
50]. The inter-row loosening machine supplied with the robot was selected according to the power requirement specified by the manufacturer. The operating speed (5 km h
−1) of the diesel-powered robot (E6) was selected following the manufacturer’s recommendations for the weed control operation. Another robot compared in the study was powered by electricity with solar modules and batteries (E7). This robot can work 8 h or more without interruption [
49]. Its working speed (1.0 km h
−1) was the lowest of all the weed control machines.
2.2. Calculation of the Energy Input/Output
This study examines the energy input for an area of 20 hectares of organic sugar beet production. In order to compare the energy efficiency of different weed control methods, energy input (agricultural machinery, fuel, working hours, etc.) and energy output were calculated. Energy input and technological indicators were assessed for each weed control method, including all organic sugar beet growing operations in accordance with the recommendations of the Lithuanian Institute of Agrarian Economics for agricultural companies, farmers, and other enterprises providing agricultural services [
51]. Energy output was calculated using the results of sugar beet root yield, excluding leaf biomass left on the soil surface after harvest. In order to unify different units of measurement of agricultural input, a conversion method was applied. It uses input energy equivalents of fuel, human labor, agricultural machinery, seeds, etc., which are presented in
Table 1.
Energy input was calculated following the equation:
2.3. Energy Use Efficiency
Various energy efficiency parameters were calculated to evaluate and to compare different weed control methods. The energy efficiency ratio (Equation (2)) was determined by dividing the energy output of sugar beet (MJ ha
−1) by the total energy consumption (MJ ha
−1) [
44,
55,
61,
67]. Energy productivity (kg MJ
−1) is an indicator showing how many kilograms of sugar beet can be grown using one MJ of energy [
44,
55]. Net energy gain (MJ ha
−1) is expressed as the difference between the energy output and input [
44,
55,
68,
69]. Non-renewable energy includes diesel and machinery. Renewable energy consists of human labor, seeds, electricity, and manure.
2.4. Fuel Consumption
One of very important direct energy inputs of sugar beet production is fuel. Diesel fuel consumption for the E1–E5 weed control methods was determined based on data published by LIAE [
51]. For E6, fuel consumption was calculated according to the engine performance curve provided by the manufacturer [
70], assuming that the robot was operating in economy mode and the engine crankshaft speed did not exceed 1600 min
−1 (engine RPM did not exceed 1600 min
−1). Diesel was not used for the E7 method, but the energy use per hectare of weed control was calculated based on the hourly electricity consumption of the robot [
49].
2.5. Assessment of GHG Emissions
Typically, GHG emissions into the atmosphere are expressed in carbon dioxide equivalent (CO
2−eq). The conversion factors presented in
Table 2 were used to estimate GHG emissions from different organic sugar beet production systems. The GHG emissions from each sugar beet production process were calculated by estimating the input of diesel, propane gas, electricity, seeds, fertilizers, and machinery and multiplying them by the corresponding GHG factors—Equation (3):
The sustainability of different weed control methods for organic sugar beet production was assessed using the ratio of the output of the obtained production to the total input of GHG emissions—Equation (4) [
71]:
Table 2.
GHG coefficients (kg CO2−eq unit−1) of agricultural input and output.
Table 2.
GHG coefficients (kg CO2−eq unit−1) of agricultural input and output.
| Particulars | Description of Input and Output | Unit | GHG Coefficient | Reference(s) |
|---|
| A. Input | | | | |
| Machinery | Tillage, sowing, crop care, harvesting, and transportation | MJ−1 | 0.071 | [41,60,72,73] |
| Diesel fuel | Tillage, sowing, crop care, harvesting, and transportation | L−1 | 2.76 | [41,60,71,73] |
| Electricity | Weed control with electric-powered robot | kWh−1 | 0.78 | [60,74] |
| Propane | Weed control with thermal inter-row steaming | kg−1 | 0.63 | [71] |
| Seeds (sugar beet) | Main sowing material | kg−1 | 3.54 | [75] |
| Seeds (catch crop, i.e., mustard) | Inter-row sowing material | kg−1 | 2.63 | [76] |
| Manure | Farmyard manure as the main organic fertilizer | kg−1 | 0.126 | [41,77] |
| B. Output | | | | |
| Sugar beet | Yield of sugar beet roots | kg−1 | 0.40 | [78] |
2.6. Sugar Beet Yield
The yield of organic sugar beet roots in experiments E1–E4 was determined by the weighing method, expressed in tons per hectare (t ha
−1). Sugar beet yield for automated-robotic weed control methods was assumed based on the yield obtained using traditional mechanical inter-row loosening (E1). It was assumed that the sugar beet yield in automated mechanical inter-row loosening (E5) was 11% higher due to automation [
17]. Kunz et al. reported that precision hoeing technologies increased the yield of sugar beet by 37%, while, after conventional hoeing, it increased by only 26% [
17]. For robotic loosening methods (E6, E7), due to lower soil compaction, the sugar beet yield was assumed to have an additional increase of 7% [
79] compared to the sugar beet yield obtained with traditional mechanical loosening (E1). This percentage increase was used based on the presentation by Shockley and Dillon [
79] that, due to the light configuration of the autonomous vehicles, soil compaction could be reduced, leading to a 7% increase in crop yields.
2.7. Statistical Analysis
Data from the research in organic sugar beet production was statistically processed using the Tukey HSD test [
80]. Significant differences in sugar beet energy and GHG emissions, as well as the differences in yield between the weed control methods analyzed, were determined by calculating the least significant difference for a 95% level of confidence (
p < 0.05). Different letters in the figures (a, b, c, etc.) indicate a statistically significant difference.
3. Results
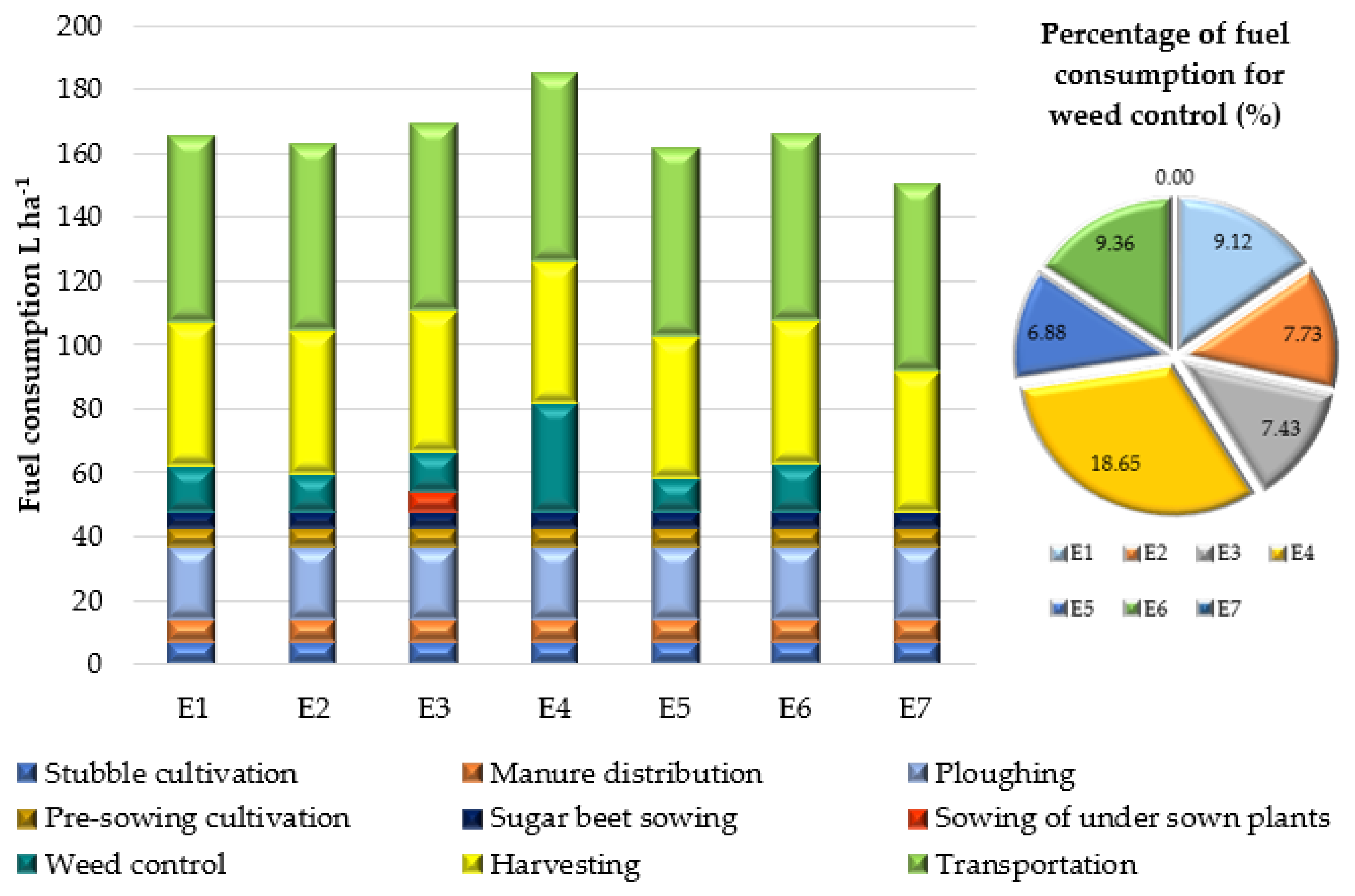
3.1. Fuel Consumption for Sugar Beet Production
For all weed control methods, except for inter-row cutting and mulching, the same working width of the machines was chosen—3.0 m. Other technological indicators of the machines differed because the implementation of different inter-row farming practices requires different power and working time and unequal field productivity. These factors also led to differences in fuel consumption. The main technological indicators of the weed control technological operations are presented in
Table 3.
Sugar beet production requires high fuel input due to the intensive use of machinery for soil preparation, weed control, harvesting, and transportation. The total fuel consumption for sugar beet cultivation ranged from 150.7 to 185.3 L ha
−1, depending on the weed control method applied (
Figure 2).
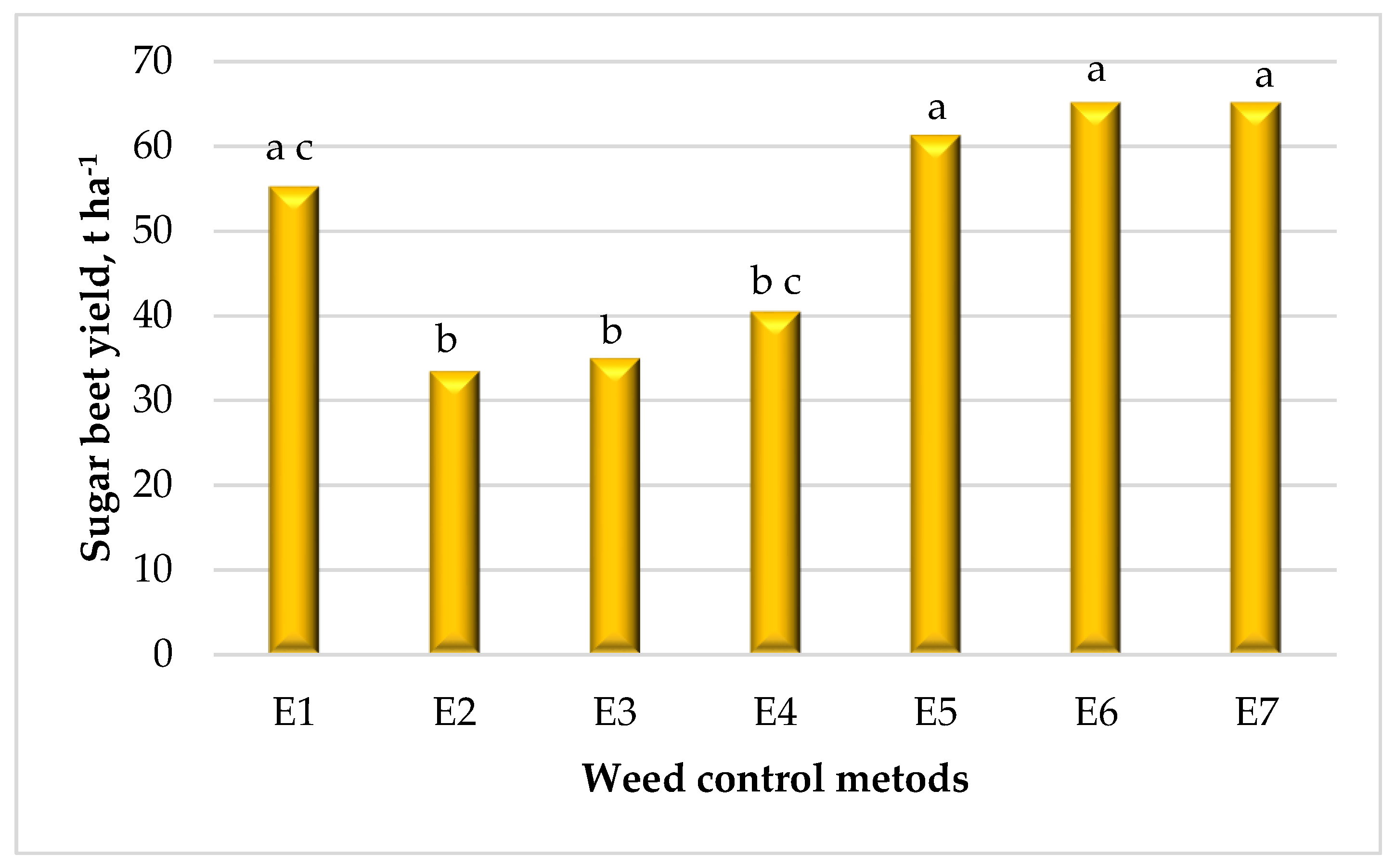
3.2. Sugar Beet Yield
Crop care and the chosen method of weed control affect the yield of sugar beet. Analytical calculations showed that the highest average sugar beet yields (65.2 t ha
−1) were predicted in the variants using robotic weed control methods (E6, E7), when mechanical inter-row loosening is performed with diesel and electric robots (
Figure 3). The lowest average sugar beet yield (33.5 t ha
−1) in 2015 and 2017 was obtained by applying inter-row cutting and mulching with weeds (E2), and in 2016 it was obtained by applying inter-row cutting and mulching with catch crop (E3) (36.4 t ha
−1). Such large differences in yields between the years were caused by meteorological conditions. Significant differences in the yield of organic sugar beet (
p < 0.05) were found only by comparing mechanical weed control methods with other methods—E2, E3, and E4, except for E1 and E4. No significant difference was found in the assessment of sugar beet yields between years.
3.3. Energy Indicators
The total average energy consumption for sugar beet production over the three-year period, regardless of the weed control method, ranged from 26671 MJ ha
−1 to 29615 MJ ha
−1 (
Figure 4). The largest share of energy consumption was accounted for by 48–53% for manure and 29–35% for diesel fuel. The energy consumption of agricultural machinery averaged 14.7% of the total energy consumption and depended on total working time per hectare.
The energy consumption of working time, electricity, sugar beet, and catch crops accounted for an insignificant share of the total energy consumption—2.4%. In our study, the average net energy gain was 171879 MJ ha
−1 and the average energy productivity of sugar beet production was 1.83 kg MJ
−1. Application of the E6 weed control method resulted in the highest energy productivity—2.41 kg MJ
−1, achieved when the average three-year sugar beet yield was 65.2 t ha
−1. The ratio of renewable energy sources to total energy consumption was the highest (53.7%) when applying automated inter-row loosening with cameras (E5). Renewable energy sources can be reused and are non-consumable. However, they are limited and have a probability of exhaustion [
81]. The ratio of non-renewable energy sources was the highest (51.4%) when applying thermal inter-row loosening (E4).
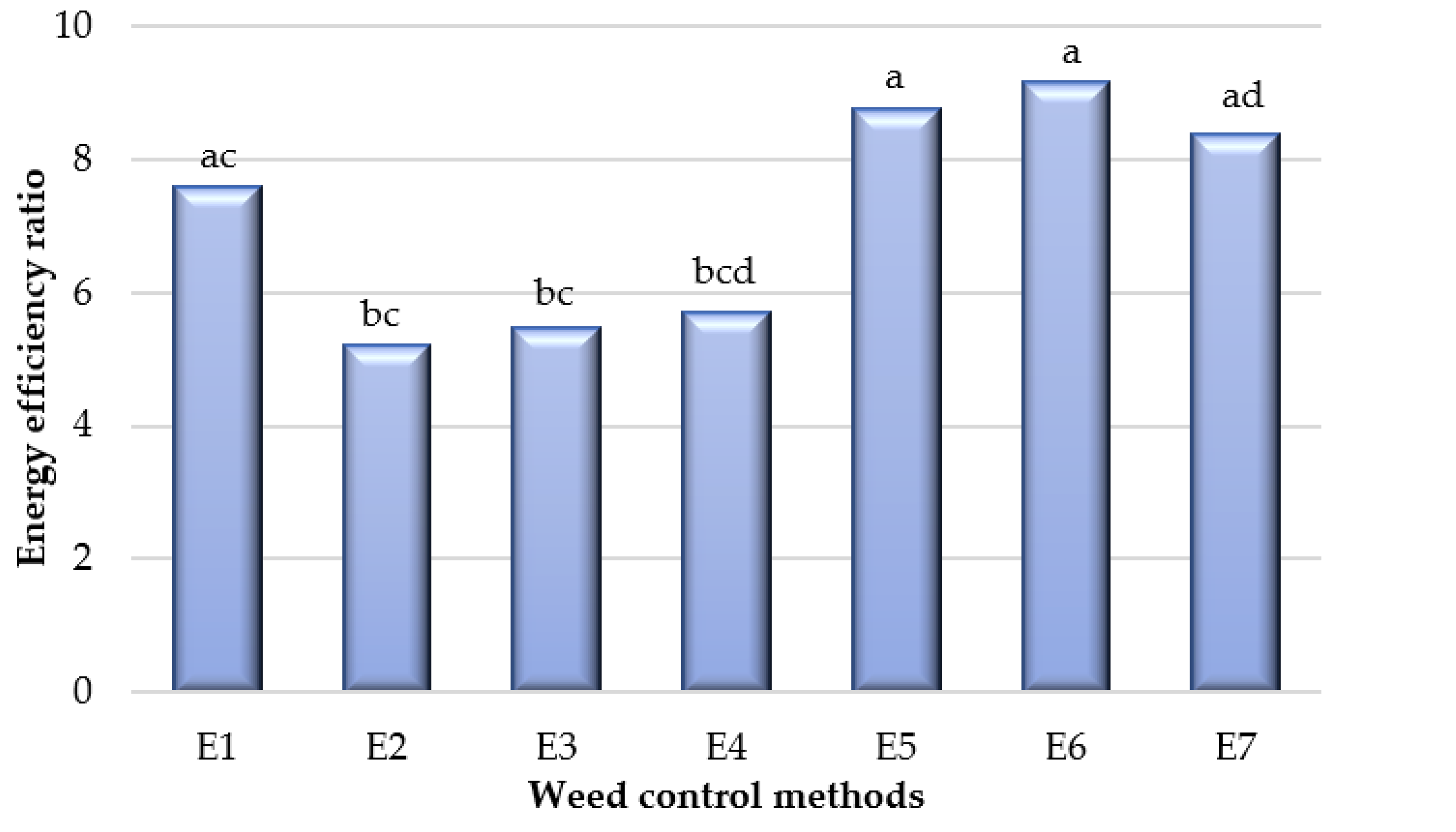
Assessment of the energy efficiency ratio indicates whether a plant production technology gains energy (>1) or loses energy (<1) [
44]. When applying different weed control methods for organic sugar beet production, the highest energy efficiency ratio (
Figure 5) was achieved by mechanical inter-row loosening with a diesel-powered robot E6 (9.16) and the lowest—by E2 (5.19).
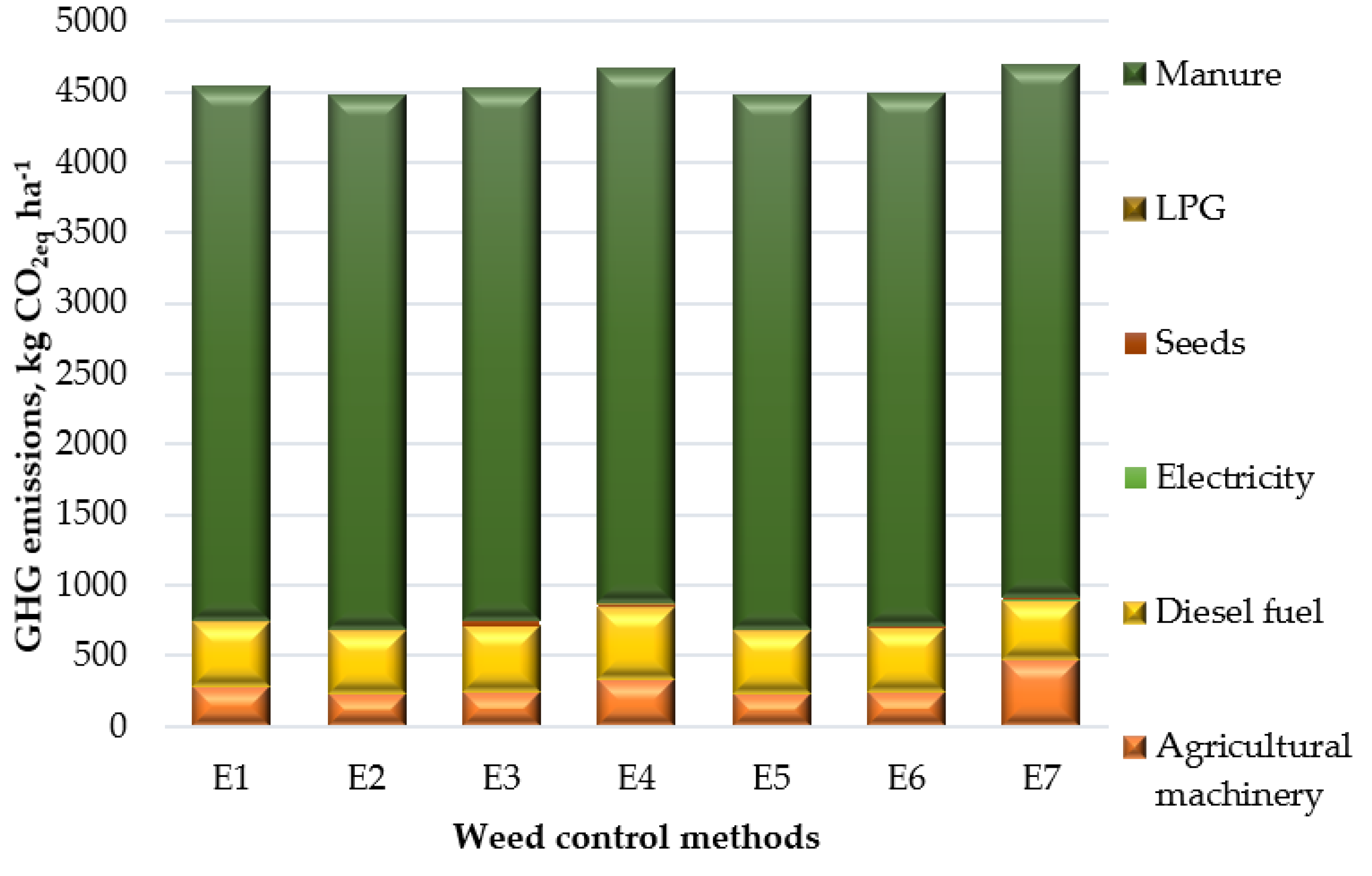
3.4. Greenhouse Gas Emissions
The results of calculated GHG emissions are presented in
Figure 6. An evaluation of different weed control methods in organic sugar beet production revealed that, due to high nitrogen concentration, organic fertilizers were the most important factor. Total GHG emissions from organic sugar beet production ranged from 4471 to 4693 kg CO
2eq ha
−1, depending on the weed control method applied.
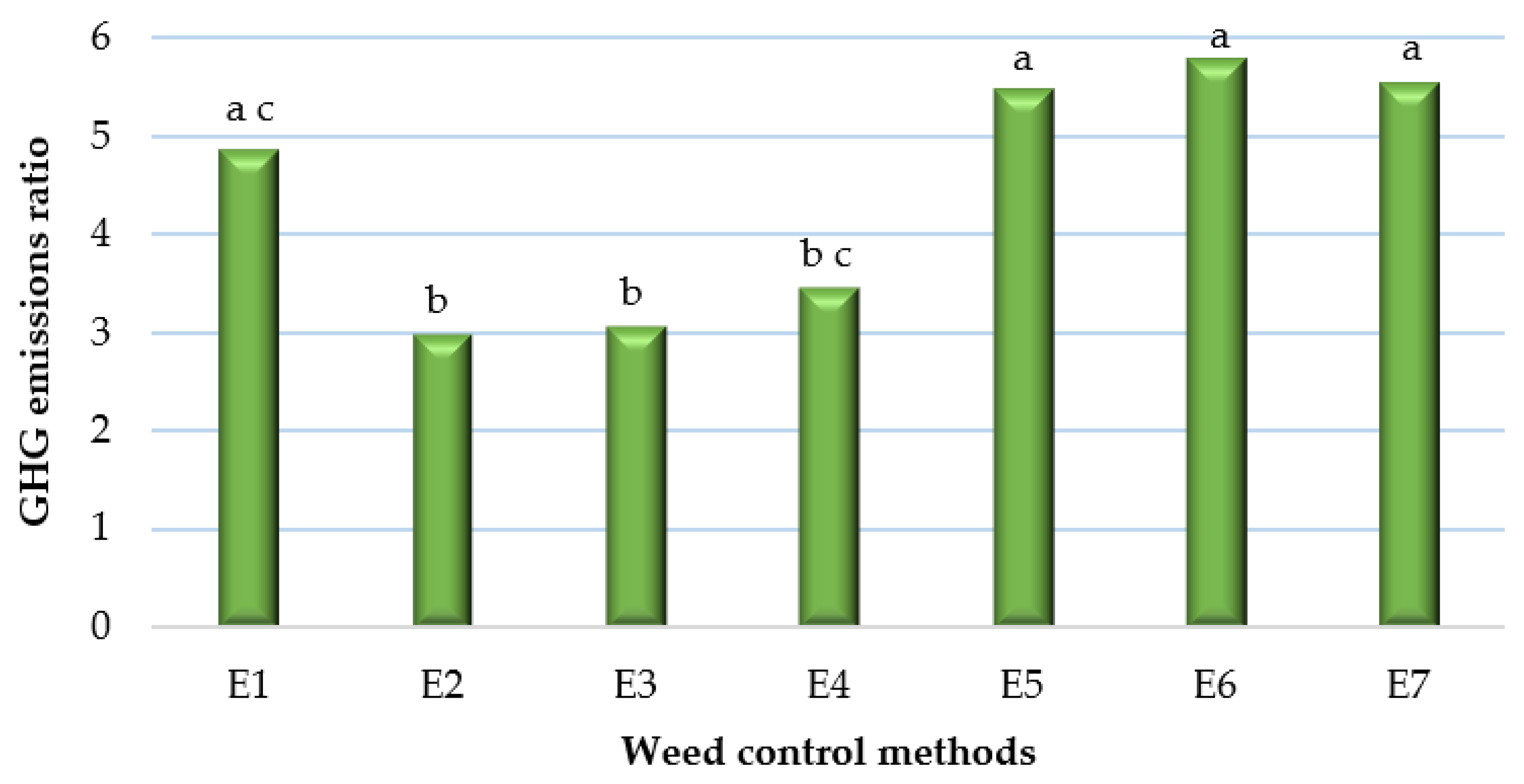
The best GHG emissions ratios, showing the sustainability of organic sugar beet production technologies, were achieved when applying mechanical inter-row loosening with a diesel-powered robot (E6), an electric robot (E7), and automated inter-row loosening (E5), 5.80, 5.56, and 5.49, respectively (
Figure 7).
4. Discussion
This section discusses the impact of seven different mechanical, thermal, and intelligent robotic weed control methods on fuel consumption, energy consumption, GHG emissions, and yield in organic sugar beet production. The main limitation of this study was that it was not possible to perform research on all methods under the same conditions. Four weed control methods E1–E4 were investigated in an experimental field and the results were obtained under real soil and climatic conditions. Meanwhile, for comparison, for the automated and robotic weed control methods, E5–E7, due to lack of equipment in the country, sugar beet yield and the other results required for this study were calculated using previous results obtained by other researchers.
4.1. Fuel Consumption
The most fuel-intensive technological operation was transportation, accounting for about 35.5% of total input, followed by harvesting (26.9%) and ploughing (13.6%). The remaining fuel input for land preparation, manure spreading, sowing, and weed control accounted for about 24% of the total input. The E7 weed control method had the lowest fuel consumption due to the electric robot. Automated inter-row loosening had the lowest fuel consumption compared with the other diesel-powered methods, as using visual cameras for row-tracking allows operating at higher speeds. The results of a study by Gerhards et al. [
82] demonstrated that automatic camera-controlled weeding was 7 to 15% more efficient at 8 km h
−1 compared to 4 km h
−1. The most polluting method of weed control from an environmental point of view was the thermal inter-row steaming (E4) due to low working speed. Erdal et al. [
61] obtained very similar results (170.3 L ha
−1) when determining the fuel consumption for sugar beet production.
Analyzing the percentage of diesel fuel consumption for weed control, it was found that the highest fuel consumption of 18.65% was in the E4 treatment with inter-row steaming. Others behind it were the diesel-powered E6 and conventional E1 treatments, which consumed 9.36 and 9.12% of the total fuel used in sugar beet production, respectively.
4.2. Sugar Beet Yield
The average yield of organic sugar beet in the European Union is about 50 t ha
−1 [
19]. In our study, it was found that the sugar beet yield depended on the weed control method and varied from 65.2 t ha
−1 using robots E6 and E7 to 33.5 t ha
−1 using the mechanical weed control method E2 with inter-row cutting and mulching with weeds. Researchers from other countries have obtained similar results for the yields of sugar beet. Majidi et al. [
12] showed that the yield of sugar beet roots ranged from 27.2 to 73.7 t ha
−1 when using chemical weed control methods, and the lowest root yield was obtained in the control (20.7 t ha
−1). The study of Jursik et al. [
10] of sugar beet crop in the Czech Republic when applying manual weed control revealed that the yield of sweet roots can vary on average from 38.9 to 63.2 t ha
−1. Gerhards et al. [
13] found that the losses of crop yield might vary depending on the sugar beet growing region. Field tests in Germany and the Russian Federation showed that the sugar beet yields were higher in Germany (82.9–95.0 t ha
−1) compared to those obtained in Russia (37.9–54.6 t ha
−1).
The lowest sugar beet yields in cutting and mulching treatments E2 and E3 can be explained by the fact that the rate of weed growth compared to crops is very fast, and if weeds are not destroyed and managed, they can begin to dominate throughout the field [
83]. Although weeds in a sugar beet farm reduce crop yield and quality, they can also lead to higher labor and material losses [
18]. Analysis of previous research data has shown that inter-row crops such as weeds and catch crops compete with sugar beet and negatively affect its root yield and sucrose content [
84].
An important factor in the application of different weed control methods is soil compaction, which has a significant impact on crop growth. The low weight of the robots compared to traditional large and heavy machines makes it possible to reduce soil compaction. Sugar beet is sensitive to soil pressures due to reduced leaf area, final yield, and root quality parameters in compacted soils. A visual indicator of soil compaction is the depth of the roots, which is influenced by the pressures of the wheels of agricultural tractors and machines on the soil. Control of the frequency and position of agricultural machinery through the field on well-defined tracks can help reduce the impact of compaction on the soil [
85]. Soil compaction has negative consequences such as decreased soil porosity, decreased aeration [
86], decreased saturated hydraulic conductivity, and increased soil resistance to root penetration [
87]. Typically, soil compaction results in negative crop growth conditions due to high mechanical root resistance, decreased soil aeration, and reduced water accumulation [
88].
4.3. Energy Assessment
Assessment of energy consumption for different weed control methods applied revealed that the highest energy consumption was in the E7 (29,615 MJ ha−1) and E4 (29,499 MJ ha−1) variants. It was caused by the fact that working speed and work productivity were the lowest when working with a solar-powered robot and applying thermal weed control methods (E7—0.27 ha h−1; E4—0.52 ha h−1). For comparison, when applying conventional inter-row loosening (E1), work productivity was 0.80 ha h−1.
Both Dimitrijevic et al. [
44] and Erdal et al. [
61], 28.9 and 24.2%, respectively, identified diesel fuel as the second most intensive energy user in sugar beet production. Other authors confirm that the thermal weed control method reduced productivity by 10% due to the additional time required to replenish propane gas tanks [
89].
The estimated total average energy consumption of 27844 MJ ha
−1 falls within the range of energy consumption values determined by other researchers: 11,100–35,800 MJ ha
−1 [
62,
67]. Dimitrijevic et al. [
44], after a three-year study in Serbia, obtained almost identical average energy consumption for sugar beet production (27849 MJ ha
−1). Other scientists’ research showed that, in Turkey, at a sugar beet yield of 68 t ha
−1, the energy productivity was 1.98 kg MJ
−1 [
90]. Serbian researchers, studying the energy and economic indicators of sugar beet production, determined the energy productivity of sugar beet to be 1.57 kg MJ
−1 when the yield was 48.2 t ha
−1 [
44].
The energy efficiency ratio indicator was mainly influenced by the sugar beet yield. A significant difference in energy efficiency (
p < 0.05) was found between the automated-robotic inter-row loosening methods E5–E7 and E2 and E3. A significant difference was also found between the E4 and E5–E6 weed control methods. Šarauskis et al. [
91] compared conventional and organic sugar beet cultivation methods and found that the energy efficiency ratio in organic crops was significantly lower, ranging from 4.02 to 8.21. In this study, the overall energy efficiency ratio of all sugar beet growing technologies was 7.18. Tzilivakis et al. [
47] studied sugar beet production in the UK and found that sugar beet, on average, produces 9.7 times more energy than it consumes. Asgharipour et al. [
55] found the energy efficiency ratio for chemical sugar beet production to be 13.4. In the studies of other researchers, significantly higher input-output ratios were obtained and ranged from 15.4 [
62] to 26.45 [
44]. This was mainly due to the use of more intensive chemicalized sugar beet growing technologies, which allowed the reduction of energy inputs and increased the yields. Organic sugar beet production uses more energy for weed control and organic fertilizers.
In some cases, a mechanical weed control method alone may not be sufficient. This method is not always able to eradicate weeds growing very close to sugar beets. In such cases, a manual weed control method is often still used.
4.4. GHG Emissions
Manure accounted for the largest share of GHG emissions, averaging about 83% of total emissions. On a lesser scale, but still significant, the environment was polluted by diesel, machinery, and seeds; 10%, 6.4%, and 0.4%, respectively. Electricity and LPG accounted for an insignificant share of GHG emissions. Other authors obtained similar research results. Šarauskis et al. [
45] found that the largest source of GHG emissions when growing winter wheat and spring barley in organic and sustainable farming systems was usage of manure. It ranged from 74% of total emissions in small farms (2 ha) to 82% in large farms (80 ha). Yousefi et al. [
43] found that, in sugar beet production, systems using irrigation electricity accounted for the largest share of GHG emissions (73%), followed by nitrogen fertilizers (15%) and diesel (7%).
Assessment of the environmental impact of weed control methods revealed that the largest impact on GHG emissions was related to machinery and diesel fuels. In terms of GHG emissions from fuel, the cleanest weed control methods were using an electric robot (E7) and automated mechanical inter-row loosening (E5) with GHG emissions from fuel being 416 and 447 kg CO2eq ha−1, respectively. Assessment of the environmental impact of the machinery alone showed that the lowest pollution was observed with the E2 and E5 weed control methods, 226 and 230 kg CO2eq ha−1, respectively, and the highest was with E7 (476 kg CO2eq ha−1). This was mainly caused by the very low productivity of an electric robot (0.27 ha h−1).
The GHG emissions ratio results are due to higher sugar beet yields associated with the automation of the process and lower GHG costs. A slightly lower GHG emissions ratio (4.87) was obtained using conventional mechanical inter-row loosening (E1). There were no significant differences between these weed control methods. A significant difference was found only when comparing weed control methods E1, E5, E6, and E7 with the other methods—E2, E3, and E4, except for E1 and E4. The total average GHG emissions ratio was 4.47. The studies of Yousefi et al. [
43], evaluating the efficiency of sugar beet production for environmental pollution, indicated that the GHG emissions ratio was 10.95.
5. Conclusions
In this study, an analytical analysis was performed to determine the energy use and GHG emissions in organic sugar beet production. It was estimated that, on average, organic sugar beet production consumes 27844 MJ ha−1 of energy, while energy output was 199724 MJ ha−1. Manure (50.6%) and diesel (33.6%) accounted for the largest share of energy consumption. After evaluation of the efficient use of energy resources by applying different weed control methods, it was found that sugar beets could be grown in the most energy efficient way by using a diesel-powered robot. Energy efficiency, energy productivity, and net energy gain were equal to 7.18, 1.83 kg MJ−1, and 171879 MJ ha−1, respectively. The share of renewable and non-renewable energy input in total energy consumption was 51.7% and 48.3%, respectively.
The results showed that the lowest total energy consumption (26671 MJ ha−1) was obtained when using an automated method of mechanical inter-row loosening with cameras. Meanwhile, the highest energy efficiency ratio (9.16) was achieved when using a diesel-powered robot.
The highest yield of organic sugar beet roots (65.2 t ha−1) was found in those variants where sugar beet was grown when applying weed control with diesel and electric robots, and the lowest (33.5 t ha−1), when applying inter-row mulching with weeds.
Analysis of GHG emissions revealed that the total greenhouse gas emissions ranged from 4471 to 4693 kg CO2eq ha−1, depending on the weed control method applied. The main source of GHG emissions was manure, which accounted for over 80% of all pollution. The highest sustainability of organic sugar beet production was achieved when applying inter-row loosening with a diesel-powered robot.
The study found that intelligent robotic weed control methods, compared to conventional ones, can reduce energy costs, increase crop yields, and reduce GHG emissions into the environment, while improving the quality of the environment and the supply of organic food. Summarizing the results of the analysis, we can draw the important conclusion that reduction of the consumption of diesel fuel and organic fertilizers, such as manure, is the most important factor in controlling GHG emissions in organic sugar beet production. Due to the high precision and low weight of the machines, the use of automated and robotic methods in weed control has a promising future. However, the cost-effectiveness, technological reliability, and ease of use of robotic weed control methods in farms are important aspects that still need to be investigated in future research. New experimental studies are needed to compare changes in soil properties and compaction processes using robotic and conventional crop care machines. It is also important to assess and compare the effects of robotic weed control methods in real soil and meteorological conditions on differences in weed control efficiency, working time, energy consumption, and GHG emissions.
Author Contributions
Conceptualization, I.B. and E.Š.; methodology, I.B., D.A., and E.Š.; validation, I.B., E.Š., and K.R.; formal analysis, D.A. and K.R.; investigation, I.B. and D.A.; resources, I.B., E.Š., and K.R.; data curation, I.B. and D.A.; writing—original draft preparation, I.B., D.A., E.Š., and K.R.; writing—review and editing, E.Š. and K.R.; visualization, I.B. and D.A.; supervision, E.Š. All authors have read and agreed to the published version of the manuscript.
Funding
This project has received funding from European Social Fund (project No. 09.3.3-LMT-K-712-22-0315) under grant agreement with the Research Council of Lithuania (LMTLT).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Kirchmann, H.; Bergström, L.; Kätterer, T.; Andrén, O.; Andersson, R. Can Organic Crop Production Feed the World? In Organic Crop Production—Ambitions and Limitations; Kirchmann, H., Bergström, L., Eds.; Springer: Dordrecht, The Netherlands, 2008; pp. 39–72. [Google Scholar] [CrossRef] [Green Version]
- Cioni, F.; Maines, G. Weed control in sugarbeet. Sugar Tech. 2010, 12, 243–255. [Google Scholar] [CrossRef]
- Jabran, K.; Chauhan, B.S. Non-Chemical Weed Control; Academic Press: Cambridge, MA, USA, 2018; p. 172. ISBN 978-0-12-809881-3. [Google Scholar]
- Cook, S.K.; Davies, L.R.; Pickering, F.; Tatnell, L.V.; Huckle, A.; Newman, S.; Whiteside, C.; White, C.; Talbot, D.; Holmes, H.; et al. Weed Control Options and Future Opportunities for UK Crops; Research Review No. CP 182/1807258; Agriculture and Horticulture Development Board: Kenilworth, UK, 2019. [Google Scholar]
- Oerke, E.C.; Dehne, H.W. Safeguarding production-losses in major crops and the role of crop protection. Crop. Prot. 2004, 23, 275–285. [Google Scholar] [CrossRef]
- Oerke, E.C. Crop losses to pests. J. Agric. Sci. 2006, 144, 31–43. [Google Scholar] [CrossRef]
- Pimentel, D. Pest control in world agriculture. Agric. Sci. 2009, 2, 272–293. [Google Scholar]
- Sanchez-Bayo, F. Impacts of agricultural pesticides on terrestrial ecosystems. In Ecological Impacts of Toxic Chemicals; Bentham Science Publishers Ltd.: Potomac, MD, USA, 2011; pp. 63–87. [Google Scholar] [CrossRef]
- Romaneckas, K.; Romaneckienė, R.; Šarauskis, E.; Pilipavičius, V.; Sakalauskas, A. The effect of conservation primary and zero tillage on soil bulk density, water content, sugar beet growth and weed infestation. Agron. Res. 2009, 7, 73–86. [Google Scholar]
- Jursik, M.; Holec, J.; Soukup, J.; Venclova, V. Competitive relationships between sugar beet and weeds in dependence on time of weed control. Plant Soil Environ. 2018, 5, 108–116. [Google Scholar] [CrossRef] [Green Version]
- Jalali, A.H.; Salehi, F. Sugar beet yield as affected by seed priming and weed control. Arch. Agron. Soil. Sci. 2013, 59, 281–288. [Google Scholar] [CrossRef]
- Majidi, M.; Heidari, G.; Emam, Y. Qualitative characteristics of sugar beet as affected by different broadleaf herbicides combinations. Iran Agric. Res. 2017, 36, 1–6. [Google Scholar] [CrossRef]
- Gerhards, R.; Bezhin, K.; Santel, H.J. Sugar beet yield loss predicted by relative weed cover, weed biomass and weed density. Plant Prot. Sci. 2017, 53, 118–125. [Google Scholar] [CrossRef] [Green Version]
- Kunz, C.; Weber, J.F.; Peteinatos, G.G.; Sokefeld, M.; Gerhards, R. Camera steered mechanical weed control in sugar beet, maize and soybean. Precis. Agric. 2018, 19, 708–720. [Google Scholar] [CrossRef]
- Bhadra, T.; Mahapatra, C.K.; Paul, S.K. Weed management in sugar beet: A review. Fundam. Appl. Agric. 2020, 5, 147–156. [Google Scholar] [CrossRef]
- Kropff, M.J.; Spitters, C.J.T. A simple model of crop loss by weed competition from early observations on relative leaf area of the weeds. Weed Res. 1991, 31, 97–105. [Google Scholar] [CrossRef]
- Kunz, C.; Weber, J.F.; Gerhards, R. Benefits of Precision Farming Technologies for Mechanical Weed Control in Soybean and Sugar Beet—Comparison of Precision Hoeing with Conventional Mechanical Weed Control. Agronomy 2015, 5, 130–142. [Google Scholar] [CrossRef] [Green Version]
- Sabanci, K.; Aydin, C. Smart robotic weed control system for sugar beet. J. Agric. Sci. Technol. 2017, 19, 73–83. [Google Scholar]
- European Commission. EU Agricultural Outlook for Markets and Income, 2018–2030; European Commission, DG Agriculture and Rural Development: Brussels, Belgium, 2018; Available online: https://ec.europa.eu/info/files/report-eu-agricultural-outlook-2018-30_en (accessed on 3 October 2020).
- Seufert, V.; Ramankutty, N.; Foley, J.A. Comparing the yields of organic and conventional agriculture. Nature 2012, 485, 229–232. [Google Scholar] [CrossRef]
- Kunz, C.; Weber, J.F.; Gerhards, R. Comparison of different mechanical weed control strategies in sugar beets. In Proceedings of the Conference 27th Deutsche Arbeitsbesprechung über Fragen der Unkrautbiologie und -Bekämpfung, Braunschweig, Germany, 23–25 February 2016. [Google Scholar]
- Peruzzi, A.; Martelloni, L.; Frasconi, C.; Fontanelli, M.; Pirchio, M.; Raffaelli, M. Machines for non-chemical intra-row weed control in narrow and wide-row crops: A review. J. Agric. Eng. 2017, 48, 57–70. [Google Scholar] [CrossRef] [Green Version]
- Stevanato, P.; Chiodi, C.; Broccanello, C.; Concheri, G.; Biancardi, E.; Pavli, O.; Skaracis, G. Sustainability of the sugar beet crop. Sugar Tech. 2019, 21, 703–716. [Google Scholar] [CrossRef]
- Machleb, J.; Peteinatos, G.G.; Kollenda, B.L.; Andújar, D.; Gerhards, R. Sensor-based mechanical weed control: Present state and prospects. Comput. Electron. Agric. 2020, 176. [Google Scholar] [CrossRef]
- Slaughter, D.C.; Giles, D.K.; Downey, D. Autonomous robotic weed control systems: A review. Comput. Electron. Agric. 2008, 61, 63–78. [Google Scholar] [CrossRef]
- Kunz, C. Integrated Weed Control in Sugar Beet (Beta vulgaris), Using Precision Farming Technologies and Cover Cropping. Ph.D. Thesis, University of Hohenheim, Stuttgart, Germany, 2017. [Google Scholar]
- Perez-Ruiz, M.; Brenes, R.; Urbano, J.M.; Slaughter, D.C.; Forcella, F.; Rodríguez-Lizana, A. Agricultural residues are efficient abrasive tools for weed control. Agron. Sustain. Dev. 2018, 38, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Pedersen, S.M.; Fountas, S.; Blackmore, S. Agricultural robots—Applications and economic perspectives. In Service Robot Applications; Takahashi, Y., Ed.; InTech: Rijeka, Croatia, 2008; pp. 369–382. [Google Scholar]
- Van Evert, F.K.; Samson, J.; Polder, G.; Vijn, M.; van Dooren, H.; Lamaker, A.; van der Heijden, G.; Kempenaar, C.; van der Zalm, T.; Lotz, B. A robot to detect and control broad-leaved dock (Rumex obtusifolius L.) in grassland. J. Field Robot. 2011, 28, 264–277. [Google Scholar] [CrossRef]
- Norremark, M.; Sorenson, C.G.; Jorgenson, R.N. HortiBot: Comparison of present and future phytotechnologies for weed control—Part III. In Proceedings of the 2006 ASAE Annual Meeting American Society of Agricultural and Biological Engineers, Portland, OR, USA, 9–12 July 2006; p. 1. [Google Scholar]
- Piron, A.; van der Heijden, F.; Destain, M.F. Weed detection in 3D images. Precis. Agric. 2011, 12, 607–622. [Google Scholar] [CrossRef] [Green Version]
- Perez-Ruiz, M.; Slaughter, D.C.; Gliever, C.; Upadhyaya, S.K. Tractor-based Real-time Kinematic-Global Positioning System (RTK-GPS) guidance system for geospatial mapping of row crop transplant. Biosyst. Eng. 2012, 111, 64–71. [Google Scholar] [CrossRef]
- Heno, S.; Viou, L.; Khan, M.F.R. Sugar beet production in France. Sugar Tech. 2018, 20, 392–395. [Google Scholar] [CrossRef]
- Perez-Ruiz, M.; Slaughter, D.C.; Fathallah, F.A.; Gliever, C.J.; Miller, B.J. Co-robotic intra-row weed control system. Biosyst. Eng. 2014, 126, 45–55. [Google Scholar] [CrossRef]
- Bawden, O.; Ball, D.; Kulk, J.; Perez, T.; Russell, R. A lightweight, modular robotic vehicle for the sustainable intensification of agriculture. In Proceedings of the 16th Australasian Conference on Robotics and Automation 2014; Australian Robotics and Automation Association Inc.: Brisbane, Australia, 2014; pp. 1–9. Available online: https://eprints.qut.edu.au/82219 (accessed on 5 October 2020).
- Jensen, K.; Larsen, M.; Nielsen, S.H.; Larsen, L.B.; Olsen, K.S.; Jorgensen, R.N. Towards an Open Software Platform for Field Robots in Precision Agriculture. Robotics 2014, 3, 207–234. [Google Scholar] [CrossRef] [Green Version]
- Choi, K.H.; Han, S.K.; Han, S.H.; Park, K.; Kim, K.; Kim, S. Morphology-based guidance line extraction for an autonomous weeding robot in paddy fields. Comput. Electron. Agric. 2015, 113, 266–274. [Google Scholar] [CrossRef]
- Grimstad, L.; Johan, P. The thorvald II agricultural robotic system. Robotics 2017, 6, 24. [Google Scholar] [CrossRef] [Green Version]
- Utstumo, T.; Urdal, F.; Brevik, A.; Dorum, J.; Netland, J.; Overskeid, O.; Berge, T.W.; Gravdahl, J.T. Robotic in-row weed control in vegetables. Comput. Electron. Agric. 2018, 154, 36–45. [Google Scholar] [CrossRef]
- Perez, T.; McCool, C.; Bawden, O.; Kulk, J. Robotic weeding–From concept to trials. In Proceedings of the 7th Asian-Australasian Conference on Precision Agriculture, Hamilton, New Zealand, 16–18 October 2017. [Google Scholar]
- Pishgar-Komleh, S.H.; Omid, M.; Heidari, M.D. On the study of energy use and GHG (greenhouse gas) emissions in greenhouse cucumber production in Yazd province. Energy 2013, 59, 63–71. [Google Scholar] [CrossRef]
- Haciseferogullari, H.; Acaroglu, M.; Gezer, I. Determination of the energy balance of the sugar beet plant. Energy Sources 2003, 25, 15–22. [Google Scholar] [CrossRef]
- Yousefi, M.; Khoramivafa, M.; Mondani, F. Integrated evaluation of energy use, greenhouse gas emissions and global warming potential for sugar beet (Beta vulgaris) agroecosystems in Iran. Atmos. Environ. 2014, 92, 501–505. [Google Scholar] [CrossRef]
- Dimitrijević, A.; Gavrilović, M.; Ivanović, S.; Mileusnić, Z.; Miodragović, R.; Todorović, S. Energy use and economic analysis of fertilizer use in wheat and sugar beet production in Serbia. Energies 2020, 13, 2361. [Google Scholar] [CrossRef]
- Šarauskis, E.; Masilionytė, L.; Juknevičius, D.; Buragienė, S.; Kriaučiūnienė, Z. Energy use efficiency, GHG emissions, and cost-effectiveness of organic and sustainable fertilisation. Energy 2019, 172, 1151–1160. [Google Scholar] [CrossRef]
- IPCC. Climate Change 2014: Mitigation of Climate Change. Working Group III Contribution to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change. 2014. Available online: https://www.ipcc.ch/report/ar5/wg3/ (accessed on 2 October 2020).
- Tzilivakis, J.; Warner, D.J.; May, M.; Lewis, K.A.; Jaggard, K. An assessment of the energy inputs and greenhouse gas emissions in sugar beet (Beta vulgaris) production in the UK. Agric. Syst. 2005, 85, 101–119. [Google Scholar] [CrossRef] [Green Version]
- Romaneckas, K.; Adamavičienė, A.; Šarauskis, E.; Balandaitė, J. The impact of intercropping on soil fertility and sugar beet productivity. Agronomy 2020, 10, 1406. [Google Scholar] [CrossRef]
- FarmDroid. The Product Sheet FD20. 2020. Available online: https://farmdroid.dk/en/welcome/ (accessed on 7 October 2020).
- Agrointelli. Robotti, Our Technology. 2020. Available online: https://www.agrointelli.com/robotti/ (accessed on 1 October 2020).
- LIAE. Prices of Mechanized Agricultural Services (Electronic Resource). Part 1. Main Tillage, Vilnius. 2018. Available online: https://www.laei.lt/?mt=leidiniai&straipsnis=1275&metai=2018 (accessed on 17 October 2020).
- Tabar, I.B.; Keyhani, A.; Rafiee, S. Energy balance in Iran’s agronomy (1990–2006). Renew. Sustain. Energy Rev. 2010, 14, 849–855. [Google Scholar] [CrossRef]
- Yadav, G.S.; Das, A.; Lal, R.; Babu, S.; Meena, R.S.; Saha, P.; Singh, R.; Datta, M. Energy budget and carbon footprint in a no-till and mulch based rice–mustard cropping system. J. Clean. Prod. 2018, 191, 144–157. [Google Scholar] [CrossRef]
- Taylor, A.E.B.; O’Callaghan, P.W.; Probert, S.D. Energy audit of an English farm. Appl. Energy 1993, 44, 315–335. [Google Scholar] [CrossRef]
- Asgharipour, M.R.; Mondani, F.; Riahinia, S. Energy use efficiency and economic analysis of sugar beet production system in Iran: A case study in Khorasan Razavi province. Energy 2012, 44, 1078–1084. [Google Scholar] [CrossRef]
- Mombarg, H.F.M.; Kool, A.; Corré, W.J.; Langeveld, J.W.A.; Sukkel, W. Energy and Climate Yardstick, Methodology and Equations, Wageningen. 2003, p. 26. Available online: https://library.wur.nl/WebQuery/wurpubs/fulltext/20355 (accessed on 6 October 2020). (In Dutch).
- Bos, J.F.F.P.; De Haan, J.; Sukkel, W.; Schils, R.L.M. Energy use and greenhouse gas emissions in organic and conventional farming systems in The Netherlands. NJAS Wagen. J. Life. Sci. 2014, 68, 61–70. [Google Scholar] [CrossRef] [Green Version]
- Tabatabaeefar, A.; Emamzadeh, H.; Varnamkhasti, M.G.; Rahimizadeh, R.; Karimi, M. Comparison of energy of tillage systems in wheat production. Energy 2009, 34, 41–45. [Google Scholar] [CrossRef]
- Chauhan, N.S.; Mohapatra, P.K.; Pandey, K.P. Improving energy productivity in paddy production through benchmarking—An application of data envelopment analysis. Energy Convers. Manag. 2006, 47, 1063–1085. [Google Scholar] [CrossRef]
- Ilahi, S.; Wu, Y.; Raza, M.A.A.; Wei, W.; Imran, M.; Bayasgalankhuu, L. Optimization approach for improving energy efficiency and evaluation of greenhouse gas emission of wheat crop using data envelopment analysis. Sustainability 2019, 11, 3409. [Google Scholar] [CrossRef] [Green Version]
- Erdal, G.; Esengün, K.; Erdal, H.; Gündüz, O. Energy use and economical analysis of sugar beet production in Tokat province of Turkey. Energy 2007, 32, 35–41. [Google Scholar] [CrossRef]
- Reineke, H.; Stockfisch, N.; Märländer, B. Analysing the energy balances of sugar beet cultivation in commercial farms in Germany. Eur. J. Agron. 2013, 45, 27–38. [Google Scholar] [CrossRef]
- Wegener, U. Dauerhafte Bodenbearbeitungsverfahren in Zuckerrübenfruchtfolgen—Ertragsbildung, Rentabilität, Energiebilanz und Bodenerosion im Vergleich. Ph.D. Thesis, Georg-August-Universität Göttingen, Cuvillier, Göttingen, Germany, 2001. [Google Scholar]
- Stout, B.A. Handbook of Energy for World Agriculture; Elsevier: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Soni, P.; Taewichit, C.; Salokhe, V.M. Energy consumption and CO2 emissions in rainfed agricultural production systems of Northeast Thailand. Agric. Syst. 2013, 116, 25–36. [Google Scholar] [CrossRef]
- DLG. DLG-Futterwerttabellen. In Wiederkäuer, 7th ed.; DLG: Frankfurt/Main, Germany, 1997. [Google Scholar]
- Jacobs, A.; Brauer-Siebrecht, W.; Christen, O.; Götze, P.; Koch, H.J.; Rücknagel, J.; Märländer, B. Silage maize and sugar beet for biogas production in crop rotations and continuous cultivation–energy efficiency and land demand. Field Crops Res. 2016, 196, 75–84. [Google Scholar] [CrossRef]
- Martin-Gorriz, B.; Soto-García, M.; Martínez-Alvarez, V. Energy and greenhouse-gas emissions in irrigated agriculture of SE (Southeast) Spain. Effects of alternative water supply scenarios. Energy 2014, 77, 478–488. [Google Scholar] [CrossRef]
- Eskandari, H.; Attar, S. Energy comparison of two rice cultivation systems. Renew. Sustain. Energy Rev. 2015, 42, 666–671. [Google Scholar] [CrossRef]
- Kubota Corporation. Products and Solutions–Engines. 2020. Available online: https://www.kubota.com/products/engines/index.html (accessed on 30 November 2020).
- Lal, R. Carbon emission from farm operations. Environ. Int. 2004, 30, 981–990. [Google Scholar] [CrossRef]
- Dyer, J.A.; Desjardins, R.L. Carbon dioxide emissions associated with the manufacturing of tractors and farm machinery in Canada. Biosyst. Eng. 2006, 93, 107–118. [Google Scholar] [CrossRef]
- Nabavi-Pelesaraei, A.; Abdi, R.; Rafiee, S. Applying artificial neural networks and multi-objective genetic algorithm to modelling and optimization of energy inputs and greenhouse gas emissions for peanut production. Int. J. Biosci. 2014, 4, 170–183. [Google Scholar] [CrossRef]
- Casey, J.W.; Holden, N.M. Analysis of greenhouse gas emissions from the average Irish milk production system. Agric. Syst. 2005, 86, 97–114. [Google Scholar] [CrossRef]
- Trimpler, K.; Stockfisch, N.; Marlander, B. The relevance of N fertilization for the amount of total greenhouse gas emissions in sugar beet cultivation. Eur. J. Agron. 2016, 81, 64–71. [Google Scholar] [CrossRef]
- West, T.O.; Marland, G. A synthesis of carbon sequestration, carbon emissions, and net carbon flux in agriculture: Comparing tillage practices in the United States. Agric. Ecosyst. Environ. 2002, 91, 217–232. [Google Scholar] [CrossRef]
- Li, X.M.; Kotelko, M. An integrated manure utilization system (imus): Its social and environmental benefits. In Proceedings of the 3rd International Methane and Nitrous Oxide Mitigation Conference, Beijing, China, 17–21 November 2003. [Google Scholar]
- BioGrace. BioGrace-i Calculation Rules. Version 4d. Harmonised Calculations of Bioenergy Greenhouse Gas Emissions in Europe. 2015. Available online: https://www.biograce.net/home (accessed on 9 October 2020).
- Shockley, J.M.; Dillon, C. An Economic Feasibility Assessment for Adoption of Autonomous Field Machinery in Row Crop Production. In Proceedings of the 14th International Conference on Precision Agriculture, Montreal, QC, Canada, 24–27 June 2018. [Google Scholar]
- Tukey, J.W. Methodology, and the statistician’s responsibility for both accuracy and relevance. J. Am. Stat. Assoc. 1979, 74, 786–793. [Google Scholar] [CrossRef]
- Unakıtan, G.; Aydın, B. A comparison of energy use efficiency and economic analysis of wheat and sunflower production in Turkey: A case study in Thrace Region. Energy 2018, 149, 279–285. [Google Scholar] [CrossRef]
- Gerhards, R.; Kollenda, B.; Machleb, J.; Möller, K.; Butz, A.; Reiser, D.; Griegentrog, H.W. Camera-guided Weed Hoeing in Winter Cereals with Narrow Row Distance. Gesunde Pflanzen. 2020, 72, 403–411. [Google Scholar] [CrossRef]
- Ahmad, M.T.; Tang, L.; Steward, B.L. Automated mechanical weeding. In Automation: The Future of Weed Control in Cropping Systems; Springer: Dordrecht, The Netherlands, 2014; pp. 125–137. [Google Scholar]
- Romaneckas, K.; Adamaviciene, A.; Eimutyte, E.; Pupaliene, R.; Sarauskis, E.; Marks, M.; Kimbirauskienė, R.; Cekanauskas, S. Impact of non-chemical weed control methods on the soil and sugar beet root chemical composition. J. Elem. 2018, 23, 1215–1227. [Google Scholar] [CrossRef]
- Marinello, F.; Pezzuolo, A.; Cillis, D.; Chiumenti, A.; Sartori, L. Traffic effects on soil compaction and sugar beet (Beta vulgaris L.) taproot quality parameters. Span. J. Res. 2017, 15, 1–8. [Google Scholar] [CrossRef] [Green Version]
- McHugh, A.D.; Tullberg, J.N.; Freebairn, D.M. Controlled traffic farming restores soil structure. Soil Till. Res. 2009, 104, 164–172. [Google Scholar] [CrossRef]
- Valdes-Abellan, J.; Jiménez-Martínez, J.; Candela, L.; Tamoh, K. Comparison among monitoring strategies to assess water flow dynamic and soil hydraulic properties in agricultural soils. Span. J. Agric. Res. 2015, 13, e12-001. [Google Scholar] [CrossRef]
- Da Silva, A.P.; Kay, B.D. The sensitivity of shoot growth of corn to the least limiting water range of soils. Plant Soil 1996, 184, 323–329. [Google Scholar] [CrossRef]
- Khelifi, M. Energy use and time requirements for different weeding strategies in grain corn. Can. Biosystem. Eng. 2001, 43, 2.13–2.21. [Google Scholar]
- Baran, M.F.; Gokdogan, O. Determination of energy balance of sugar beet production in Turkey: A case study of Kırklareli Province. Energy Effic. 2016, 9, 487–494. [Google Scholar] [CrossRef]
- Šarauskis, E.; Romaneckas, K.; Kumhála, F.; Kriaučiūnienė, Z. Energy use and carbon emission of conventional and organic sugar beet farming. J. Clean. Prod. 2018, 201, 428–438. [Google Scholar] [CrossRef]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






