
Calibration and Tests for the Discrete Element Simulation Parameters of Fallen Jujube Fruit

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Intrinsic Parameters
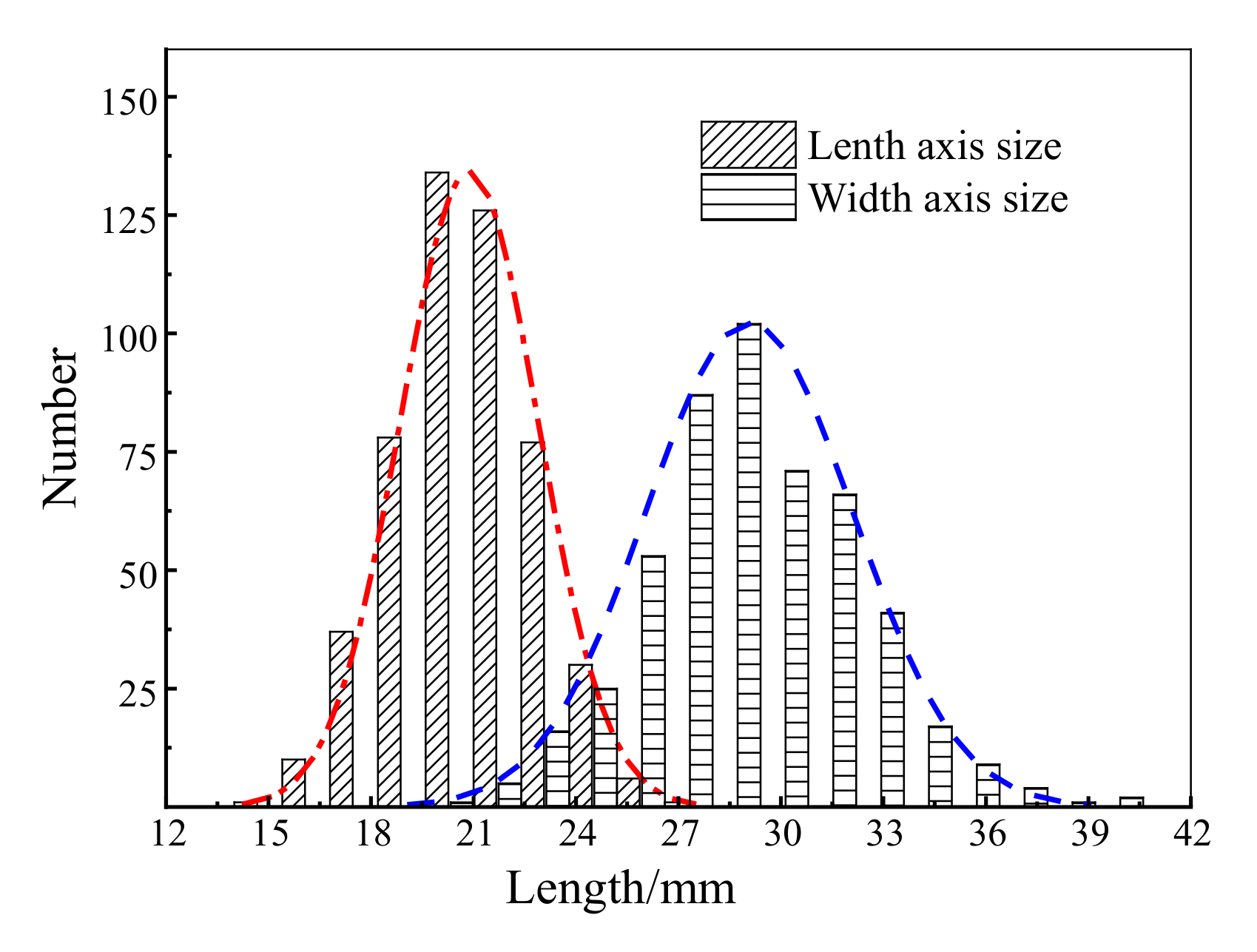
2.2.1. Size Distribution of FJF
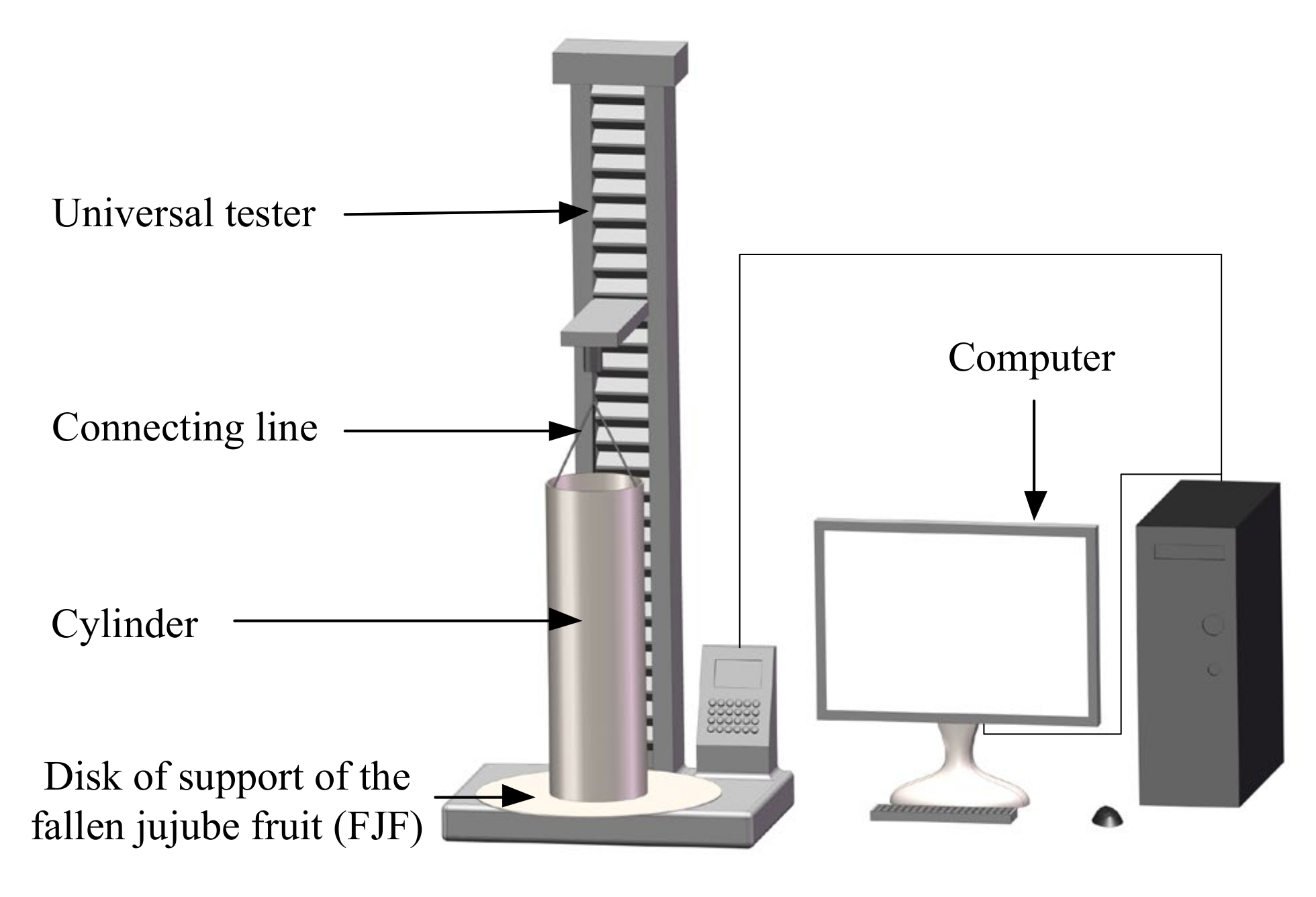
2.2.2. Poisson’s Ratio and Shearing Modulus of FJF
2.3. Contact Parameters
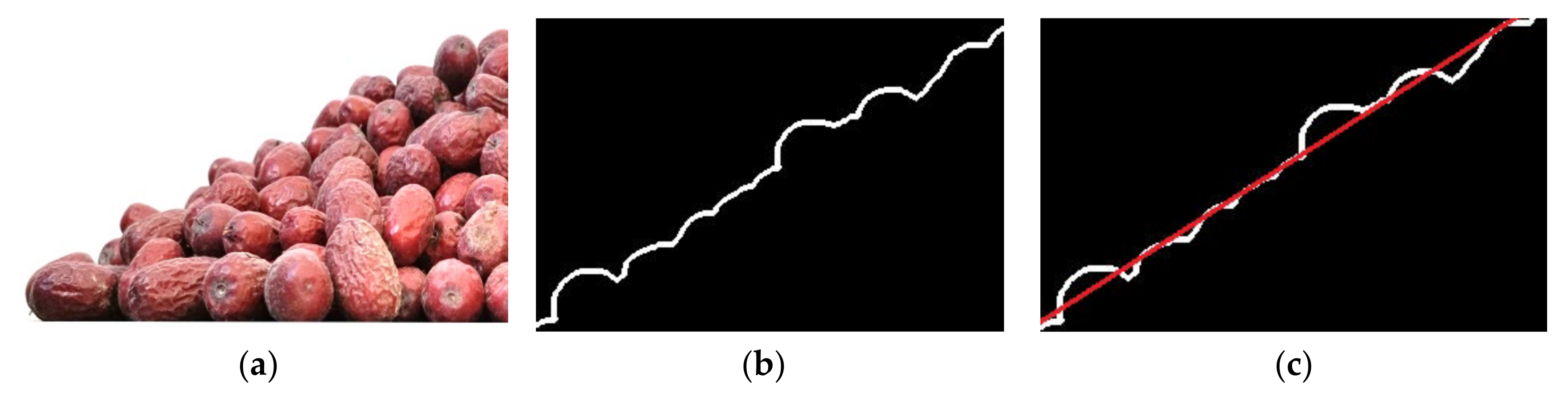
2.4. Angle of Repose Test
2.5. EDEM Software Simulation Test
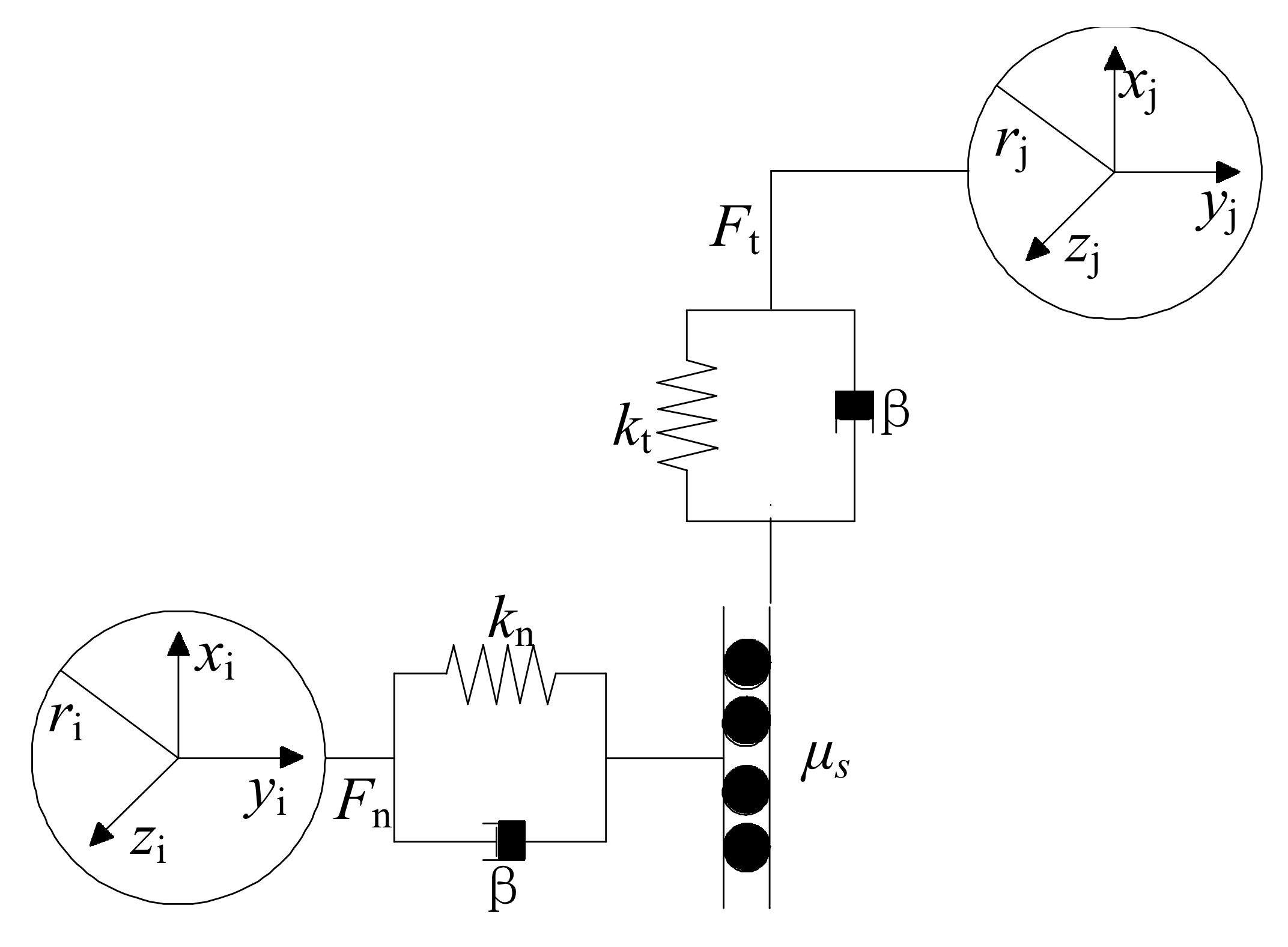
2.5.1. EDEM Software Simulation Principle
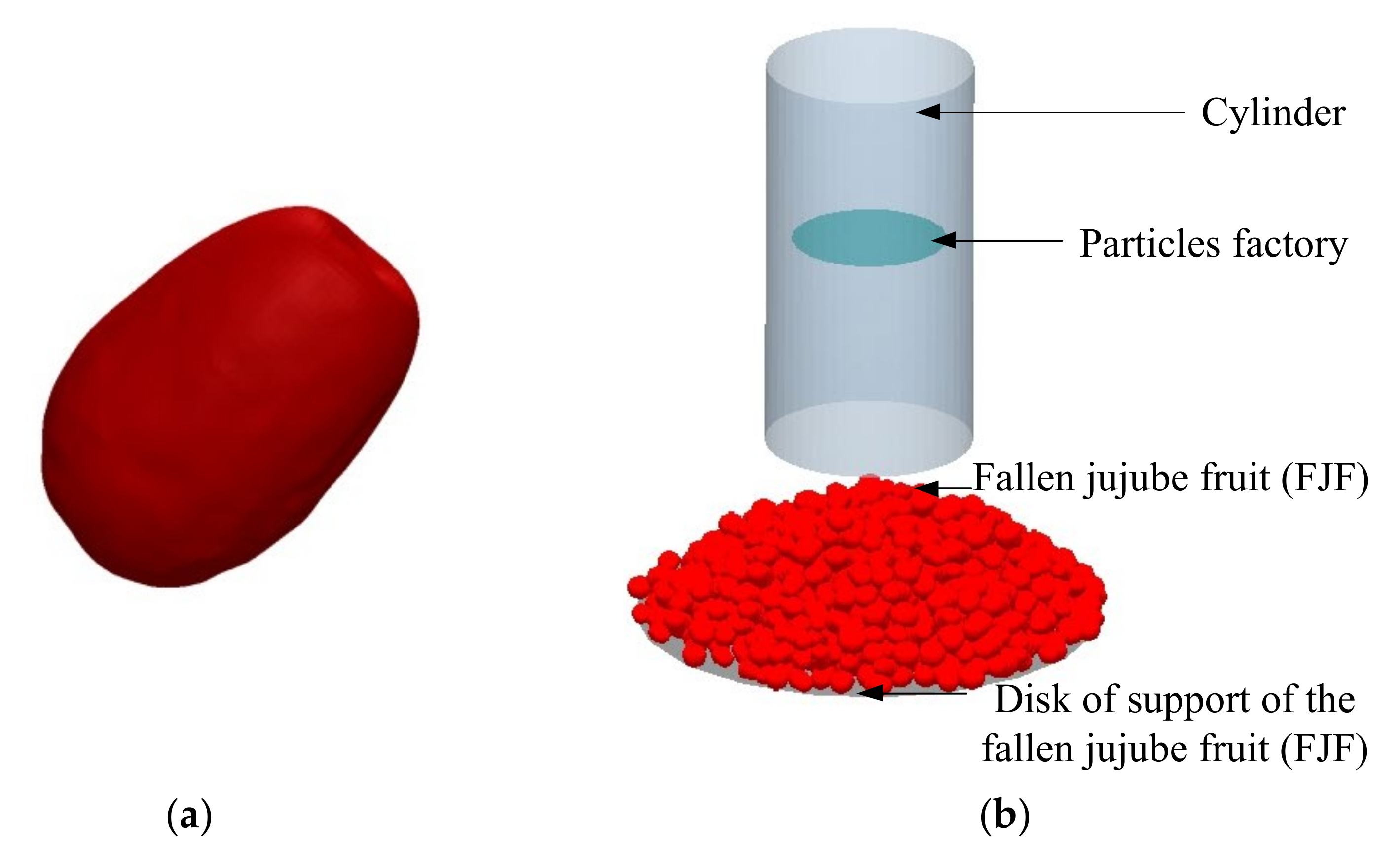
2.5.2. The Simulation Model of the Simulation Angle of Repose
2.5.3. Setting of Simulation Parameters
2.6. Date Analysis
2.6.1. Plackett–Burman Experiment
2.6.2. Steepest Ascent Search Experiment
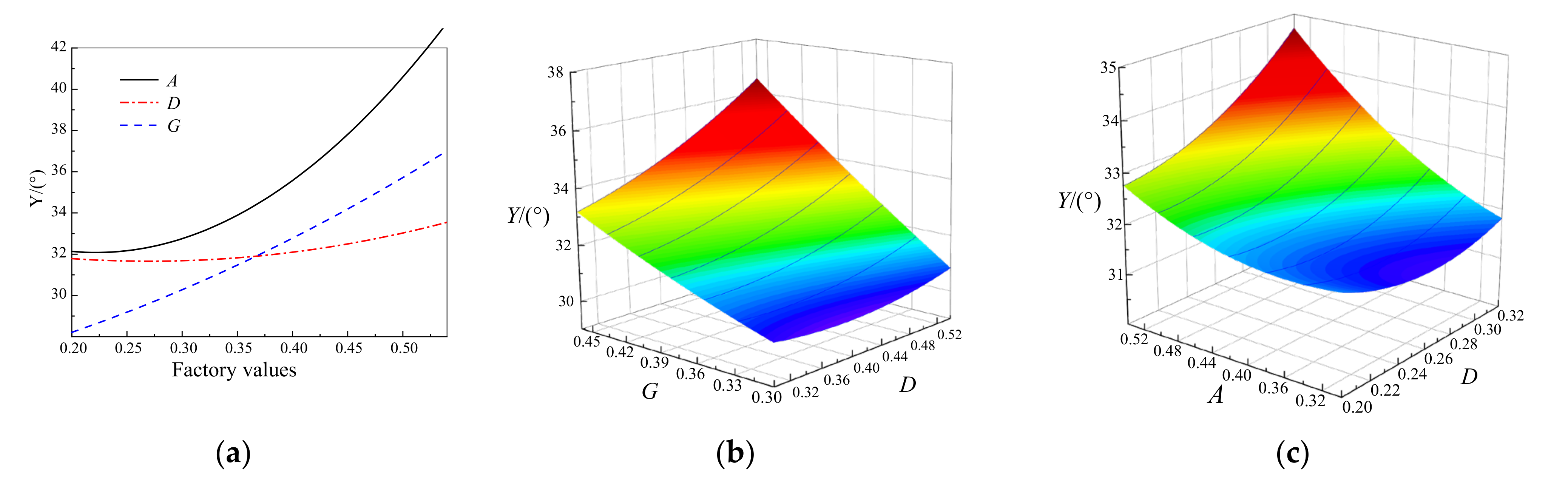
2.6.3. Central Composite Design Experiment
3. Results and Discussion
3.1. Simulation Results
3.2. Verification Tests
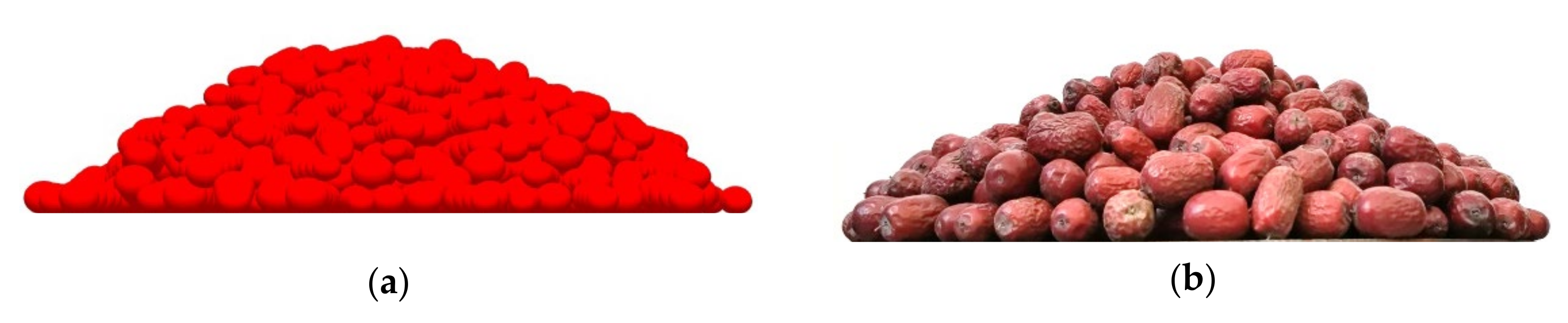
3.2.1. Angle of Repose Verification Tests
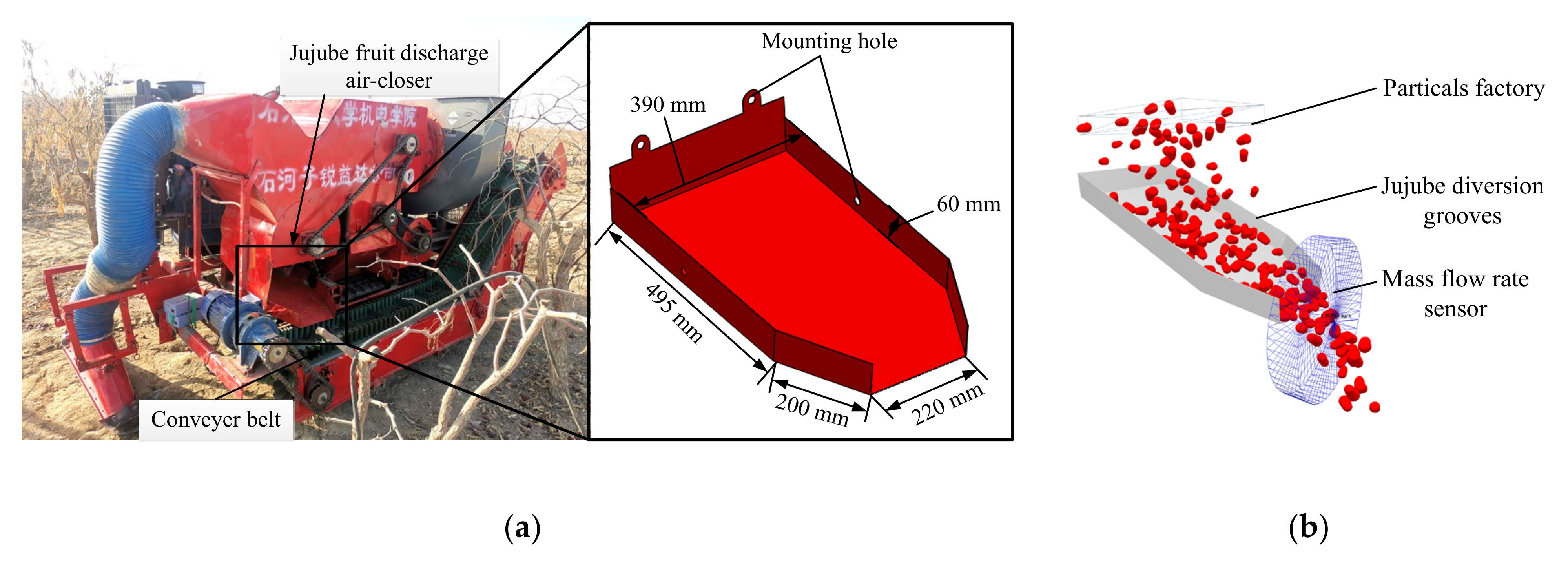
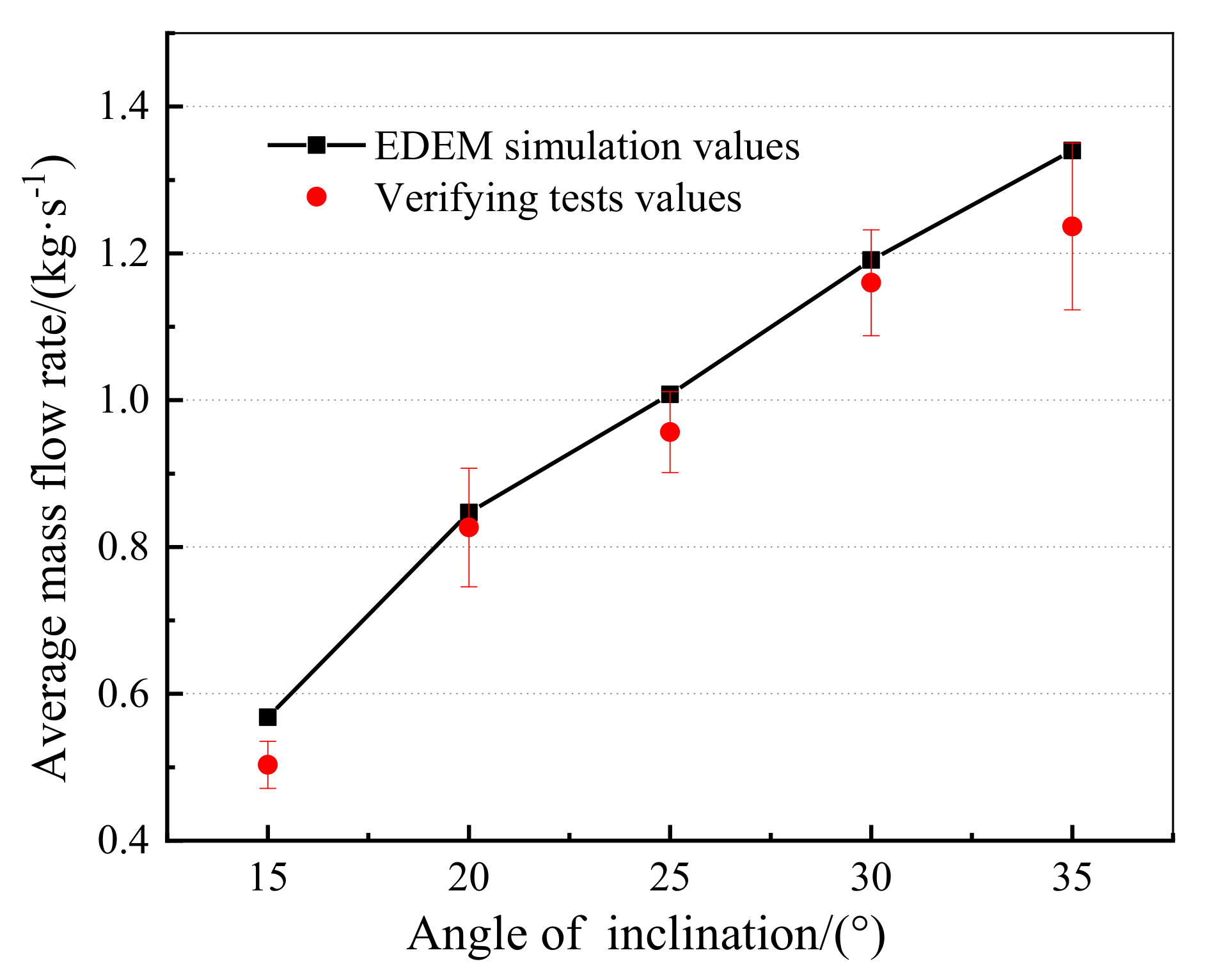
3.2.2. Verification Test of the Flow Rate of the FJF Guide Groove
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, J.W.; Fan, L.P.; Ding, S.D.; Ding, X.L. Nutritional composition of five cultivars of Chinese jujube. Food Chem. 2007, 103, 454–460. [Google Scholar] [CrossRef]
- National Statistics Bureau of the People’s Republic of China. China Statistical Yearbook; China Statistics Press: Beijing, China, 2020. [Google Scholar]
- Hu, Y.S.; Bai, B.W.; Wang, W. Present Development Situation of Red Jujube Industry in Xinjiang and Relative Countermeasures and Suggeation. Xinjiang Agric. Mech. 2016, 6, 21–24. [Google Scholar]
- Al-Niami, J.H.; Saggar, R.; Abbas, M.F. The physiology of ripening of jujube fruit (Zizyphus spina-christi (L.) Willd.). Sci. Hortic. 1992, 51, 303–308. [Google Scholar] [CrossRef]
- Lu, H.F.; Lou, H.Q.; Zheng, H.; Hu, Y.; Li, Y. Nondestructive Evaluation of Quality Changes and the Optimum Time for Harvesting During Jujube (Zizyphus jujuba Mill. cv. Changhong) Fruits Development. Food Bioprocess Technol. 2012, 5, 2586–2595. [Google Scholar] [CrossRef]
- Coetzee, C.J. Review: Calibration of the discrete element method. Powder Technol. 2017, 310, 104–142. [Google Scholar] [CrossRef]
- Michael, R.; Hanley, K.J. A methodical calibration procedure for discrete element models. Powder Technol. 2017, 307, 73–83. [Google Scholar]
- Chen, Z.P.; Wassgren, C.; Veikle, E.; Ambrose, K. Determination of material and interaction properties of maize and wheat kernels for DEM simulation. Biosyst. Eng. 2020, 195, 208–226. [Google Scholar] [CrossRef]
- Han, D.D.; Zhang, D.X.; Jing, H.R.; Yang, L.; Cui, T.; Ding, Y.Q.; Wang, Z.D.; Wang, Y.X.; Zhang, T.L. DEM-CFD coupling simulation and optimization of an inside-filling air-blowing maize precision seed-metering device. Comput. Electron. Agric. 2018, 150, 426–438. [Google Scholar] [CrossRef]
- Zeng, Z.W.; Ma, X.; Chen, Y.; Qi, L. Modelling residue incorporation of selected chisel ploughing tools using the discrete element method (DEM). Soil Tillage Res. 2020, 197, 104505. [Google Scholar] [CrossRef]
- Zhang, S.; Tekeste, M.Z.; Li, Y.; Gaul, A.; Zhu, D.; Liao, J. Scaled-up rice grain modelling for DEM calibration and the validation of hopper flow. Biosyst. Eng. 2020, 194, 196–212. [Google Scholar] [CrossRef]
- Zhao, L.L.; Zhao, Y.M.; Bao, C.Y.; Hou, Q.F.; Yu, A.B. Optimization of a circularly vibrating screen based on DEM simulation and Taguchi orthogonal experimental design. Powder Technol. 2017, 310, 307–317. [Google Scholar] [CrossRef]
- Wang, G.Q.; Hao, W.J.; Wang, J.J. Discrete Element Method and Practice on EDEM; Northwestern Polytechnical University Press: Xi’an, China, 2010. [Google Scholar]
- Wen, B.; Li, Y.; Kan, Z.; Li, J.B.; Li, L.Q.; Ge, J.B.; Ding, L.P.; Wang, K.F.; Zou, S.J.; Li, W.T. Experimental Research on the Bending Characteristics of Glycyrrhiza glabra Stems. Trans. ASABE 2020, 63, 1–10. [Google Scholar] [CrossRef]
- Yuan, Q.C.; Xu, L.M.; Xing, J.J.; Duan, Z.Z.; Ma, S.; Yu, C.C.; Chen, C. Parameter calibration of discrete element model of organic fertilizer particles for mechanical fertilization. Trans. Chin. Soc. Agric. Eng. 2018, 34, 21–27. [Google Scholar]
- Wen, X.Y.; Yuan, H.F.; Wang, G.; Jia, H.L. Calibration Method of Friction Coefficient of Granular Fertilizer by Discrete Element Simulation. Trans. Chin. Soc. Agric. Mach. 2020, 51, 115–122. [Google Scholar]
- Wang, Y.X.; Liang, Z.J.; Zhang, D.X.; Cui, T.; Shi, S.; Li, K.R.; Tan, G.L. Calibration method of contact characteristic parameters for corn seeds based on EDEM. Trans. Chin. Soc. Agric. Eng. 2016, 32, 36–42. [Google Scholar]
- Wang, W.W.; Cai, D.Y.; Xie, J.J.; Zhang, C.L.; Liu, L.C.; Chen, L.Q. Parameters Calibration of Discrete Element Model for Corn Stalk Powder Compression Simulation. Trans. Chin. Soc. Agric. Mach. 2021, 52, 127–134. [Google Scholar]
- Wu, M.C.; Cong, J.L.; Yan, Q.; Zhu, T.; Peng, X.Y.; Wang, Y.S. Calibration and experiments for discrete element simulation parameters of peanut seed particles. Trans. Chin. Soc. Agric. Eng. 2020, 36, 30–38. [Google Scholar]
- Razavi, S.; Pourfarzad, A.; Sourky, A.H.; Jahromy, S. The Physical Properties of Fig (Ficus carica L.) as a Function of Moisture Content and Variety. Philipp. Agric. Sci. 2010, 93, 170–181. [Google Scholar]
- Mahawar, M.K.; Bibwe, B.; Jalgaonkar, K.; Ghodki, B.M. Mass modeling of kinnow mandarin based on some physical attributes. J. Food Process Eng. 2019, 42, 1–11. [Google Scholar] [CrossRef]
- Artiukh, V.; Mazur, V.; Sagirov, Y.; Larionovet, A. New Methods for Determining Poisson’s Ratio of Elastomers. In Energy Management of Municipal Transportation Facilities and Transport; Springer: Cham, Switzerland, 2019; pp. 71–80. [Google Scholar]
- Wang, C.J.; Li, Y.M.; Ma, L.Z.; Ma, Z. Experimental study on measurement of restitution coefficient of wheat seeds in collision models. Trans. Chin. Soc. Agric. Eng. 2012, 28, 274–278. [Google Scholar]
- Feng, B.; Sun, W.; Shi, L.R.; Sun, B.G.; Zhang, T.; Wu, J.M. Determination of restitution coefficient of potato tubers collision in harvest and analysis of its influence factors. Trans. Chin. Soc. Agric. Eng. 2017, 33, 50–57. [Google Scholar]
- Liu, W.Z.; He, J.; Li, H.W.; Li, X.Q. Calibration of Simulation Parameters for Potato Minituber Based on EDEM. Trans. Chin. Soc. Agric. Mach. 2018, 49, 125–135. [Google Scholar]
- Shi, L.R.; Ma, Z.T.; Zhao, W.Y.; Yang, X.P.; Sun, B.G.; Zhang, J.P. Calibration of simulation parameters of flaxed seeds using discrete element method and verification of seed-metering experiment. Trans. Chin. Soc. Agric. Eng. 2019, 35, 25–33. [Google Scholar]
- Paulick, M.; Morgeneyer, M.; Kwade, A. Review on the influence of elastic particle properties on DEM simulation results. Powder Technol. 2015, 283, 66–76. [Google Scholar] [CrossRef]
- Hertz, H. On the contact of elastic solids. Journal für die reine und angewandte Mathematik. Crelles J. 1882, 92, 156–171. [Google Scholar]
- Mindlin, R.D. Compliance of Elastic Bodies in Contact. J. Appl. Mech. 1949, 16, 259–268. [Google Scholar] [CrossRef]
- Ma, Z.; Li, Y.M.; Xu, L.Z. Discrete-element method simulation of agricultural particles’ motion in variable-amplitude screen box. Comput. Electron. Agric. 2015, 118, 92–99. [Google Scholar] [CrossRef]
- Wen, B.C. Machine Design Handbook; Machinery Industry Press: Beijing, China, 2010; Volume 5. [Google Scholar]
- El-Sheekh, M.M.; Khairy, H.M.; Gheda, S.F.; El-Shenody, R.A. Application of Plackett-Burman design for the high production of some valuable metabolites in marine alga Nannochloropsis oculata. Egypt. J. Aquat. Res. 2016, 42, 57–64. [Google Scholar] [CrossRef] [Green Version]
- Dai, F.; Song, X.F.; Zhao, W.Y.; Zhang, F.W.; Ma, H.J.; Ma, M.Y. Simulative calibration on contact parameters of discrete elements for covering soil on whole plastic film mulching on double ridges. Trans. Chin. Soc. Agric. Mach. 2019, 50, 49–56. [Google Scholar]
- Hou, Z.F.; Dai, N.Z.; Chen, Z.; Qiu, Y.; Zhang, X.W. Measurement and calibration of physical property parameters for Agropyron seeds in a discrete element simulation. Trans. Chin. Soc. Agric. Eng. 2020, 36, 46–54. [Google Scholar]
- Horabik, J.; Wiacek, J.; Parafiniuk, P.; Banda, M.; Kobylka, R.; Stasiak, M.; Molenda, M. Calibration of discrete-element-method model parameters of bulk wheat for storage. Biosyst. Eng. 2020, 200, 298–314. [Google Scholar] [CrossRef]
- Liang, R.Q.; Chen, X.G.; Jiang, P.; Zhang, B.C.; Meng, H.W.; Peng, X.B.; Kan, Z. Calibration of the simulation parameters of the particulate materials in film mixed materials. Int. J. Agric. Biol. Eng. 2020, 13, 29–36. [Google Scholar] [CrossRef]
- Liu, C.L.; Wei, D.; Song, J.N.; Du, X.; Zhang, F.Y. Systematic Study on Boundary Parameters of Discrete Element Simulation of Granular Fertilizer. Trans. Chin. Soc. Agric. Eng. 2018, 49, 82–89. [Google Scholar]
- Coetzee, C.J. Calibration of the discrete element method and the effect of particle shape. Powder Technol. 2016, 297, 50–70. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paraments | Values | |
|---|---|---|
| Solids density/kg·m−3 | fallen jujube fruit (FJF) | 807.87 ex |
| steel plate | 7850 re 31 | |
| Poisson’s ratio | fallen jujube fruit (FJF) | 0.2–0.5 ex |
| steel plate | 0.3 re 31 | |
| Shear Modulus/MPa | fallen jujube fruit (FJF) | 0.03–0.9 ex |
| steel plate | 7.94 re 31 | |
| Fallen jujube fruit (FJF)–fallen jujube fruit (FJF) | coefficient of restitution | 0.1–0.4 ex |
| static friction coefficient | 0.3–0.9 ex | |
| rolling friction coefficient | 0.03–0.06 ex | |
| Fallen jujube fruit (FJF)–steel plate | coefficient of restitution | 0.2–0.5 ex |
| static friction coefficient | 0.3–0.7 ex | |
| rolling friction coefficient | 0.02–0.05 ex | |
| Factors | Levels | ||
|---|---|---|---|
| −1 | 0 | +1 | |
| A: Poisson’s ratio of fallen jujube fruit (FJF) | 0.2 | 0.35 | 0.5 |
| B: Shear modulus of fallen jujube fruit (FJF) | 0.03 | 0.465 | 0.9 |
| C: Coefficient of restitution between fallen jujube fruit (FJF) | 0.1 | 0.25 | 0.4 |
| D: Static friction coefficient between fallen jujube fruit (FJF) | 0.3 | 0.6 | 0.9 |
| E: Rolling friction coefficient between fallen jujube fruit (FJF) | 0.03 | 0.045 | 0.06 |
| F: Coefficient of restitution between fallen jujube fruit (FJF)–steel plate | 0.2 | 0.35 | 0.5 |
| G: Static friction coefficient between fallen jujube fruit (FJF)–steel plate | 0.3 | 0.5 | 0.7 |
| H: Rolling friction coefficient between fallen jujube fruit (FJF)–steel plate | 0.02 | 0.035 | 0.05 |
| No. | A | B | C | D | E | F | G | H | I | J | K | Angle of Repose (°) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.5 | 0.9 | 0.4 | 0.3 | 0.03 | 0.2 | 0.7 | 0.02 | 1 | 1 | −1 | 33.56 |
| 2 | 0.2 | 0.9 | 0.4 | 0.9 | 0.03 | 0.2 | 0.3 | 0.05 | −1 | 1 | 1 | 32.24 |
| 3 | 0.2 | 0.9 | 0.4 | 0.3 | 0.06 | 0.5 | 0.7 | 0.02 | −1 | −1 | 1 | 35.76 |
| 4 | 0.2 | 0.9 | 0.1 | 0.9 | 0.06 | 0.2 | 0.7 | 0.05 | 1 | −1 | −1 | 39.54 |
| 5 | 0.5 | 0.9 | 0.1 | 0.9 | 0.06 | 0.5 | 0.3 | 0.02 | −1 | 1 | −1 | 32.78 |
| 6 | 0.5 | 0.03 | 0.4 | 0.9 | 0.03 | 0.5 | 0.7 | 0.05 | −1 | −1 | −1 | 35.26 |
| 7 | 0.2 | 0.03 | 0.4 | 0.3 | 0.06 | 0.5 | 0.3 | 0.05 | 1 | 1 | −1 | 28.87 |
| 8 | 0.2 | 0.03 | 0.1 | 0.3 | 0.03 | 0.2 | 0.3 | 0.02 | −1 | −1 | −1 | 27.61 |
| 9 | 0.5 | 0.03 | 0.4 | 0.9 | 0.06 | 0.2 | 0.3 | 0.02 | 1 | −1 | 1 | 32.77 |
| 10 | 0.2 | 0.03 | 0.1 | 0.9 | 0.03 | 0.5 | 0.7 | 0.02 | 1 | 1 | 1 | 40.71 |
| 11 | 0.5 | 0.03 | 0.1 | 0.3 | 0.06 | 0.2 | 0.7 | 0.05 | −1 | 1 | 1 | 32.14 |
| 12 | 0.5 | 0.9 | 0.1 | 0.3 | 0.03 | 0.5 | 0.3 | 0.05 | 1 | −1 | 1 | 25.68 |
| 13 | 0.35 | 0.465 | 0.25 | 0.6 | 0.045 | 0.35 | 0.5 | 0.035 | 0 | 0 | 0 | 39.57 |
| Source of Variance | Sum of Squares | Degrees of Freedom | Mean Square | F-Value | p-Value |
|---|---|---|---|---|---|
| Model | 212.43 | 8 | 26.55 | 21.32 | 0.014 * |
| A | 13.07 | 1 | 13.07 | 10.49 | 0.048 * |
| B | 0.40 | 1 | 0.40 | 0.32 | 0.61 NS |
| C | 0.00 | 1 | 0.00 | 0.00 | 0.999 NS |
| D | 73.38 | 1 | 73.38 | 58.91 | 0.0046 ** |
| E | 3.83 | 1 | 3.83 | 3.07 | 0.178 NS |
| F | 0.12 | 1 | 0.12 | 0.10 | 0.777 NS |
| G | 114.18 | 1 | 114.18 | 91.65 | 0.002 ** |
| H | 7.45 | 1 | 7.45 | 5.98 | 0.092 NS |
| Curvature | 38.86 | 1 | 38.86 | 31.19 | 0.011 * |
| Residual | 3.74 | 3 | 1.25 | ||
| Cor total | 255.03 | 12 |
| No. | Experimental Factors | Simulation Angle of Repose/(°) | Relative Errors/% | ||
|---|---|---|---|---|---|
| A | D | G | |||
| 1 | 0.2 | 0.3 | 0.3 | 26.72 | 14.58% |
| 2 | 0.26 | 0.42 | 0.38 | 32.26 | −5.12% |
| 3 | 0.32 | 0.54 | 0.46 | 34.50 | −11.28% |
| 4 | 0.38 | 0.66 | 0.54 | 36.67 | −16.53% |
| 5 | 0.44 | 0.78 | 0.62 | 38.12 | −19.70% |
| 6 | 0.5 | 0.9 | 0.7 | 40.55 | −24.50% |
| Levels | A | D | G |
|---|---|---|---|
| −1.68 | 0.16 | 0.22 | 0.25 |
| −1 | 0.2 | 0.3 | 0.3 |
| 0 | 0.26 | 0.42 | 0.38 |
| 1 | 0.32 | 0.54 | 0.46 |
| 1.68 | 0.36 | 0.62 | 0.51 |
| No. | Coding | Response Values | No. | Coding | Response Values | ||||
|---|---|---|---|---|---|---|---|---|---|
| A | D | G | Y | A | D | G | Y | ||
| 1 | −1 | −1 | −1 | 36.30 ± 0.38 | 11 | 0 | −1.68 | 0 | 30.89 ± 1.06 |
| 2 | 1 | −1 | −1 | 33.04 ± 2.11 | 12 | 0 | 1.68 | 0 | 34.85 ± 1.77 |
| 3 | −1 | 1 | −1 | 29.25 ± 2.24 | 13 | 0 | 0 | −1.68 | 29.96 ± 1.04 |
| 4 | 1 | 1 | −1 | 38.05 ± 1.22 | 14 | 0 | 0 | 1.68 | 30.47 ± 2.67 |
| 5 | −1 | −1 | 1 | 32.31 ± 1.97 | 15 | 0 | 0 | 0 | 33.96 ± 0.92 |
| 6 | 1 | −1 | 1 | 32.68 ± 3.61 | 16 | 0 | 0 | 0 | 32.93 ± 1.76 |
| 7 | −1 | 1 | 1 | 35.74 ± 0.69 | 17 | 0 | 0 | 0 | 32.41 ± 1.91 |
| 8 | 1 | 1 | 1 | 33.92 ± 1.07 | 18 | 0 | 0 | 0 | 31.48 ± 1.47 |
| 9 | −1.68 | 0 | 0 | 32.01 ± 0.96 | 19 | 0 | 0 | 0 | 31.50 ± 0.96 |
| 10 | 1.68 | 0 | 0 | 33.48 ± 1.84 | 20 | 0 | 0 | 0 | 31.93 ± 2.19 |
| Source | Sum of Squares | df | F-Value | Mean Square | p-Value |
|---|---|---|---|---|---|
| Model | 86.61 | 9 | 9.62 | 23.75 | <0.0001 ** |
| A | 3.45 | 1 | 3.45 | 8.52 | 0.0153 * |
| D | 11.86 | 1 | 11.86 | 29.28 | 0.0003 ** |
| G | 60.55 | 1 | 60.55 | 149.43 | <0.0001 ** |
| A × D | 2.20 | 1 | 2.20 | 5.42 | 0.0421 * |
| A × G | 0.20 | 1 | 0.20 | 0.50 | 0.4958 |
| D × G | 4.40 | 1 | 4.40 | 10.86 | 0.0081 ** |
| A2 | 2.26 | 1 | 2.26 | 5.58 | 0.0398 * |
| D2 | 2.00 | 1 | 2.00 | 4.94 | 0.0504 |
| G2 | 0.28 | 1 | 0.28 | 0.70 | 0.4236 |
| Residual | 4.05 | 10 | 0.41 | ||
| Lack of Fit | 1.09 | 5 | 0.22 | 0.37 | 0.8528 |
| Pure error | 2.97 | 5 | 0.59 | ||
| Cor total | 90.67 | 19 | |||
| R2 = 0.955; R2adj = 0.915; C.V = 1.94%; R2Pred = 0.857 | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, G.; Li, J.; Ding, L.; Zhang, Z.; Ding, H.; Li, N.; Kan, Z. Calibration and Tests for the Discrete Element Simulation Parameters of Fallen Jujube Fruit. Agriculture 2022, 12, 38. https://doi.org/10.3390/agriculture12010038
Shi G, Li J, Ding L, Zhang Z, Ding H, Li N, Kan Z. Calibration and Tests for the Discrete Element Simulation Parameters of Fallen Jujube Fruit. Agriculture. 2022; 12(1):38. https://doi.org/10.3390/agriculture12010038
Chicago/Turabian StyleShi, Gaokun, Jingbin Li, Longpeng Ding, Zhiyuan Zhang, Huizhe Ding, Ning Li, and Za Kan. 2022. "Calibration and Tests for the Discrete Element Simulation Parameters of Fallen Jujube Fruit" Agriculture 12, no. 1: 38. https://doi.org/10.3390/agriculture12010038
APA StyleShi, G., Li, J., Ding, L., Zhang, Z., Ding, H., Li, N., & Kan, Z. (2022). Calibration and Tests for the Discrete Element Simulation Parameters of Fallen Jujube Fruit. Agriculture, 12(1), 38. https://doi.org/10.3390/agriculture12010038