
Analysis and Optimization Test of the Peanut Seeding Process with an Air-Suction Roller Dibbler

Abstract
:1. Introduction
2. Materials and Methods
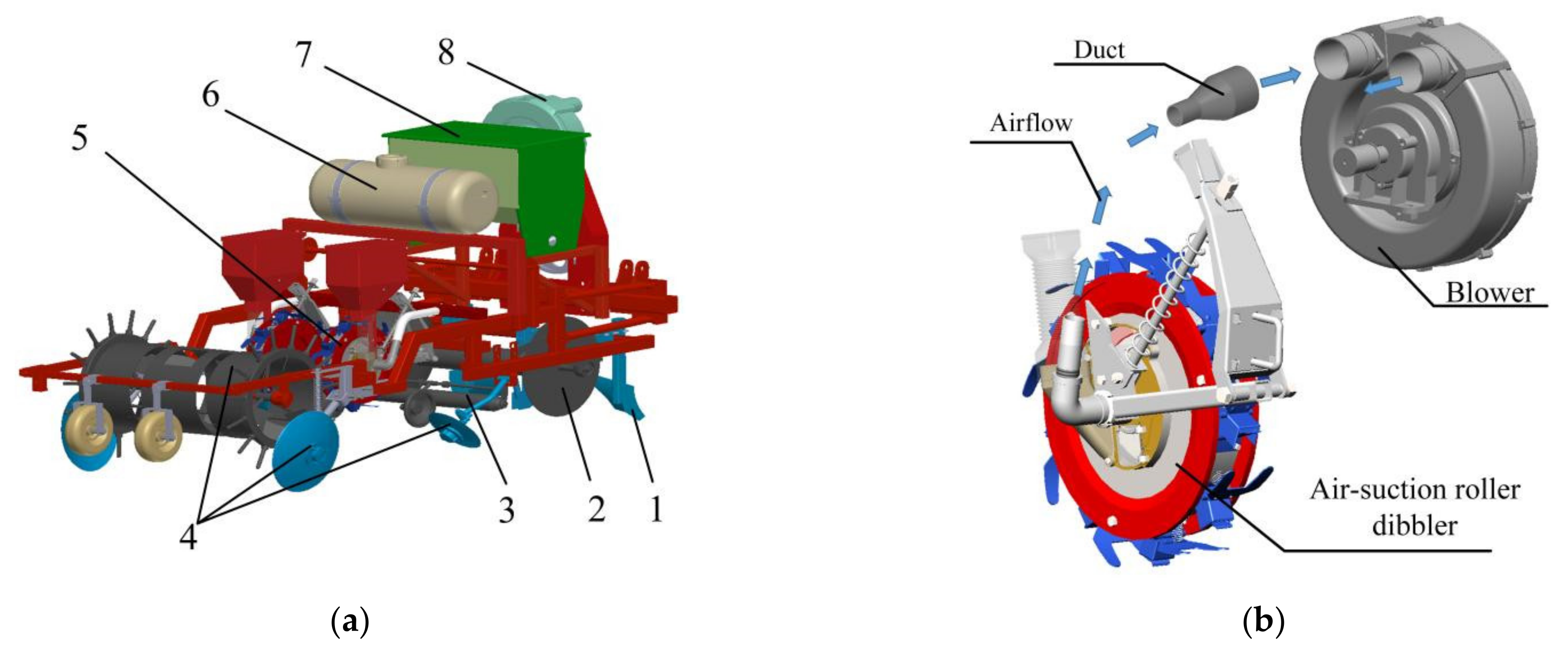
2.1. Structure and Working Principle of Peanut Film Seeder
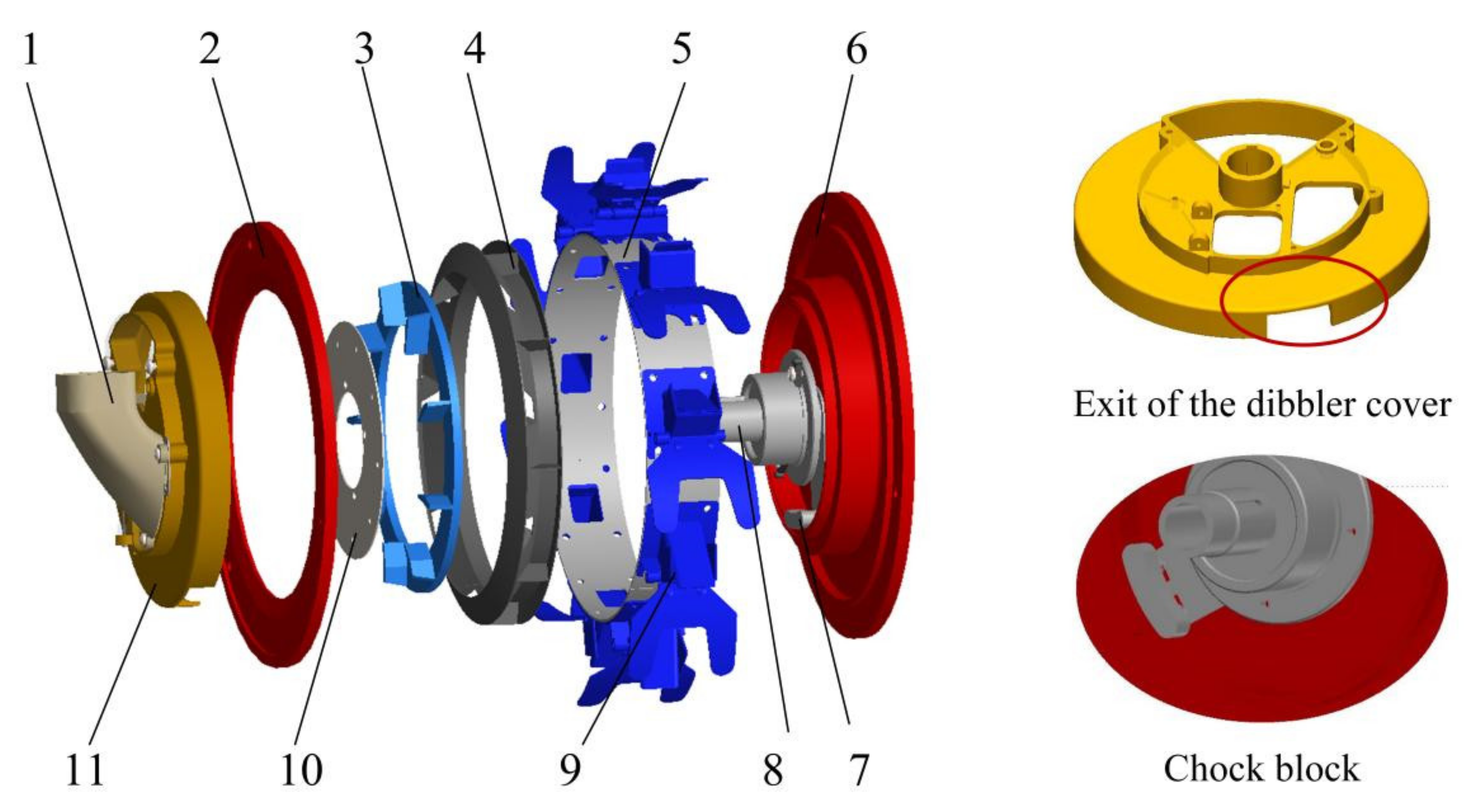
2.2. Structure and Working Principle of Dibbler
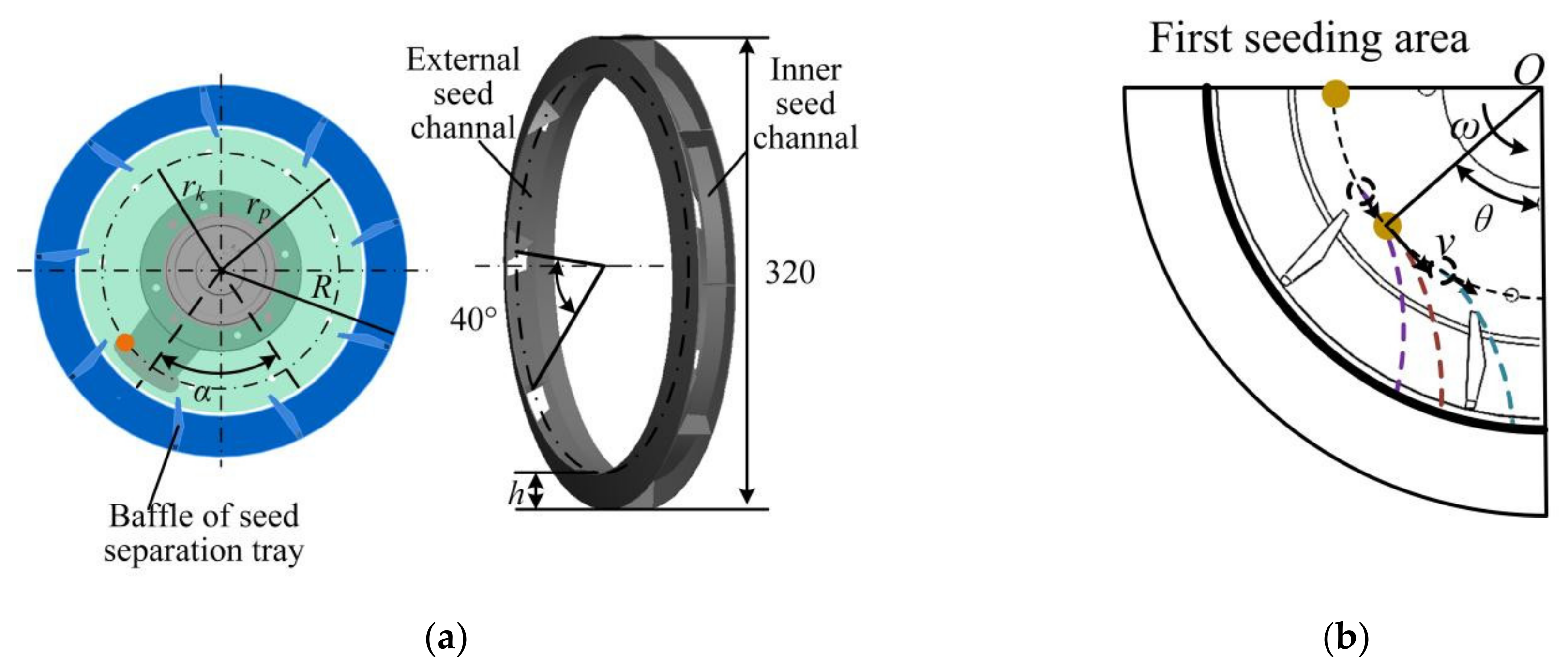
2.3. Key-Parameter Selection and Seed-Feeding-Process Analysis
2.3.1. Selection of Key Parameters for Dibbler
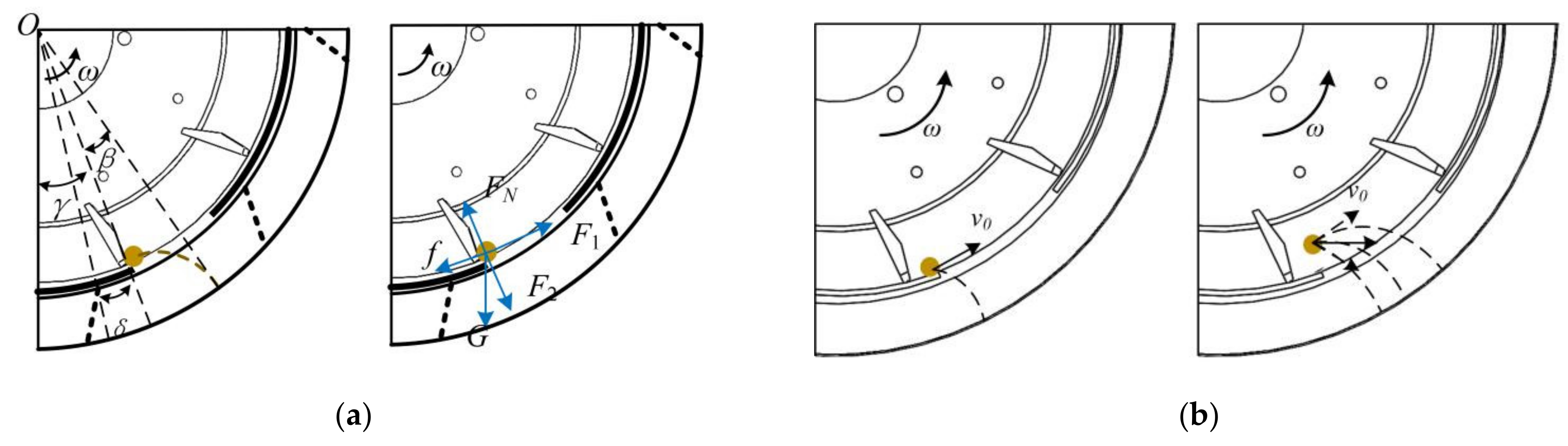
2.3.2. Analysis of Seed-Feeding Process
2.3.3. Simulation Test
2.3.4. Bench Test and Evaluation Methods
2.3.5. Field Verification Trials
3. Results and Analysis
3.1. EDEM Simulation Results
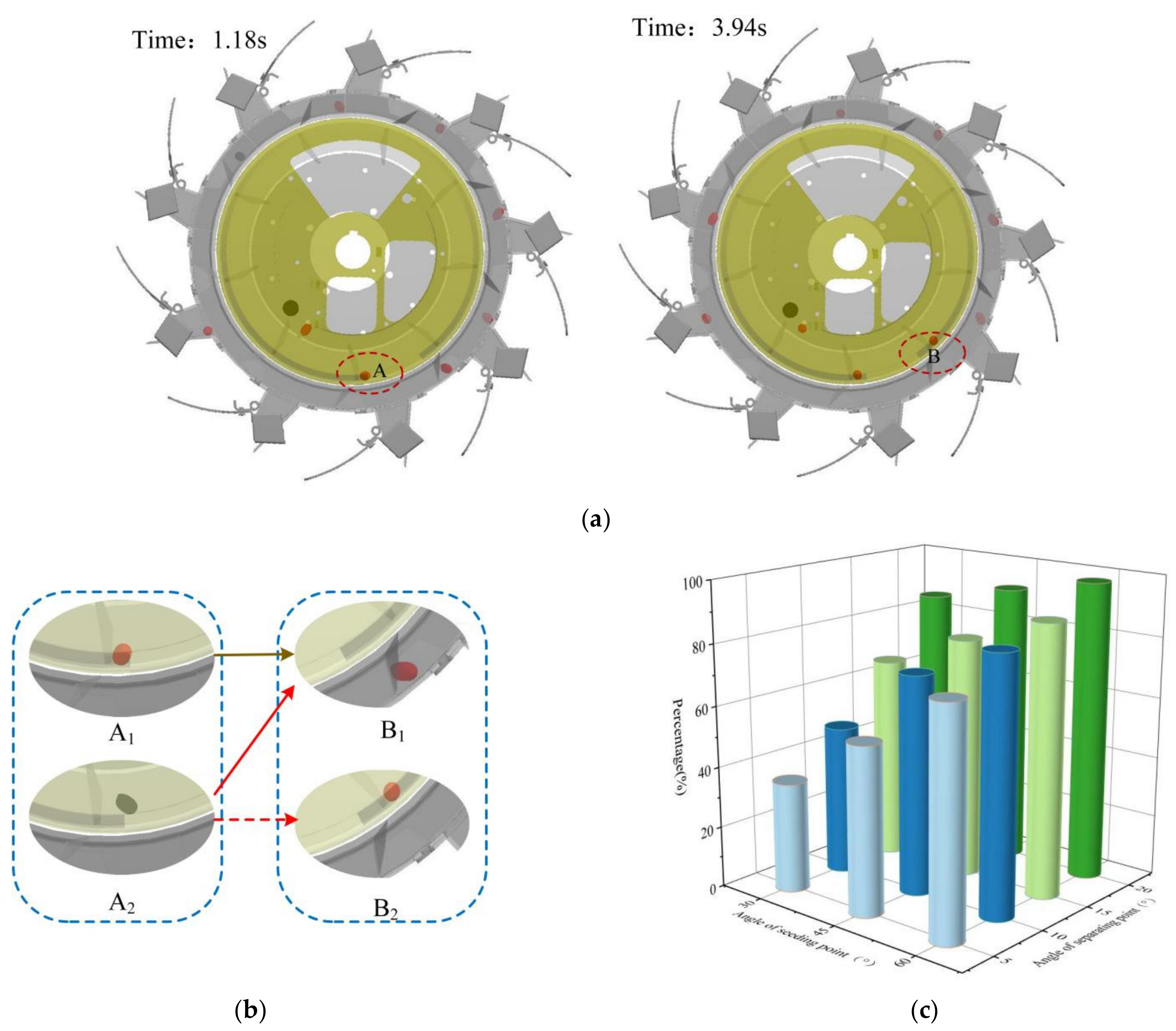
3.1.1. Analysis of Seed-Feeding-Trajectory Principle
3.1.2. Effect of IACB on Seed-Movement Speed
3.1.3. Influence of IACB and IADC on the Separation Method
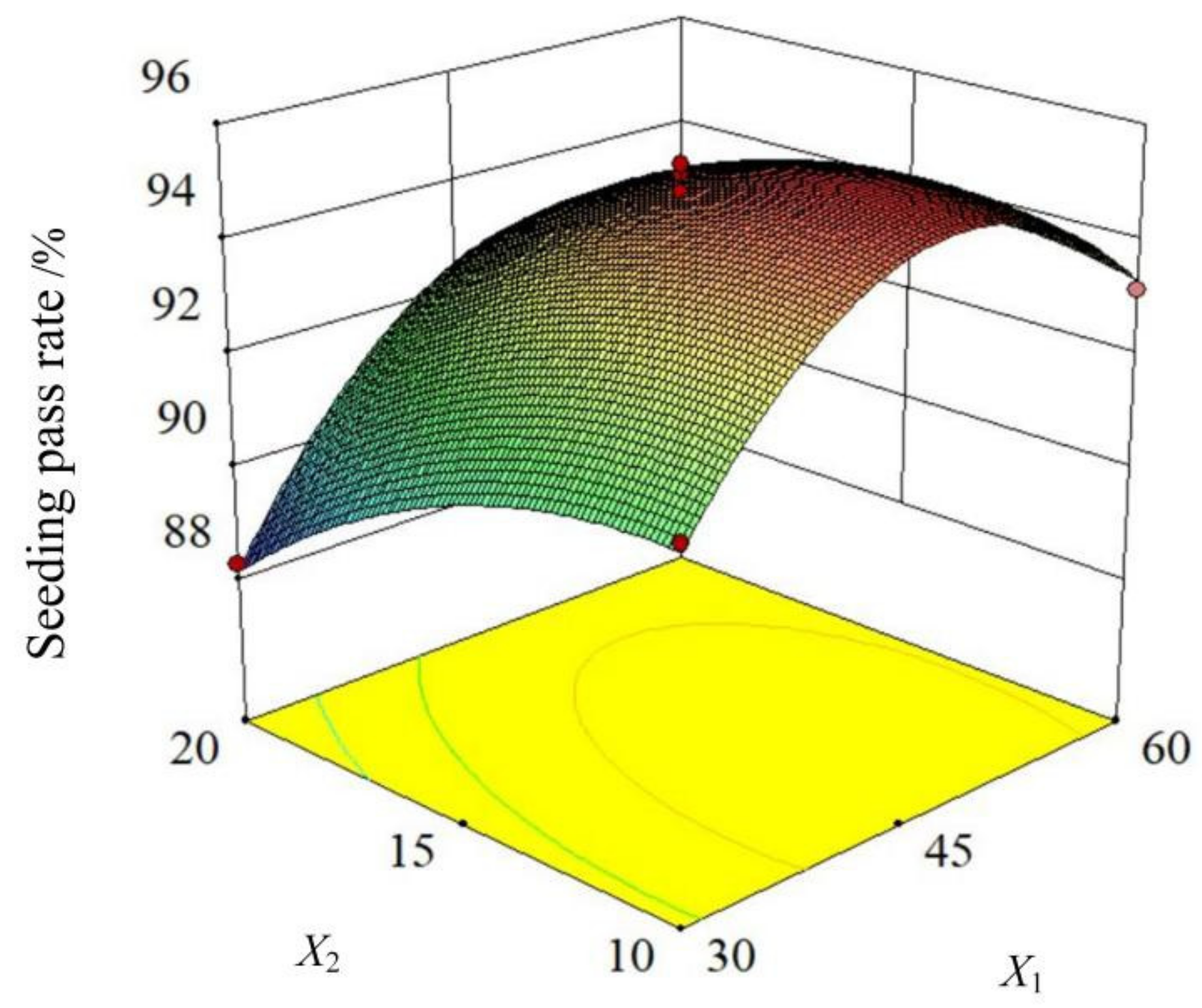
3.2. Bench Test Results
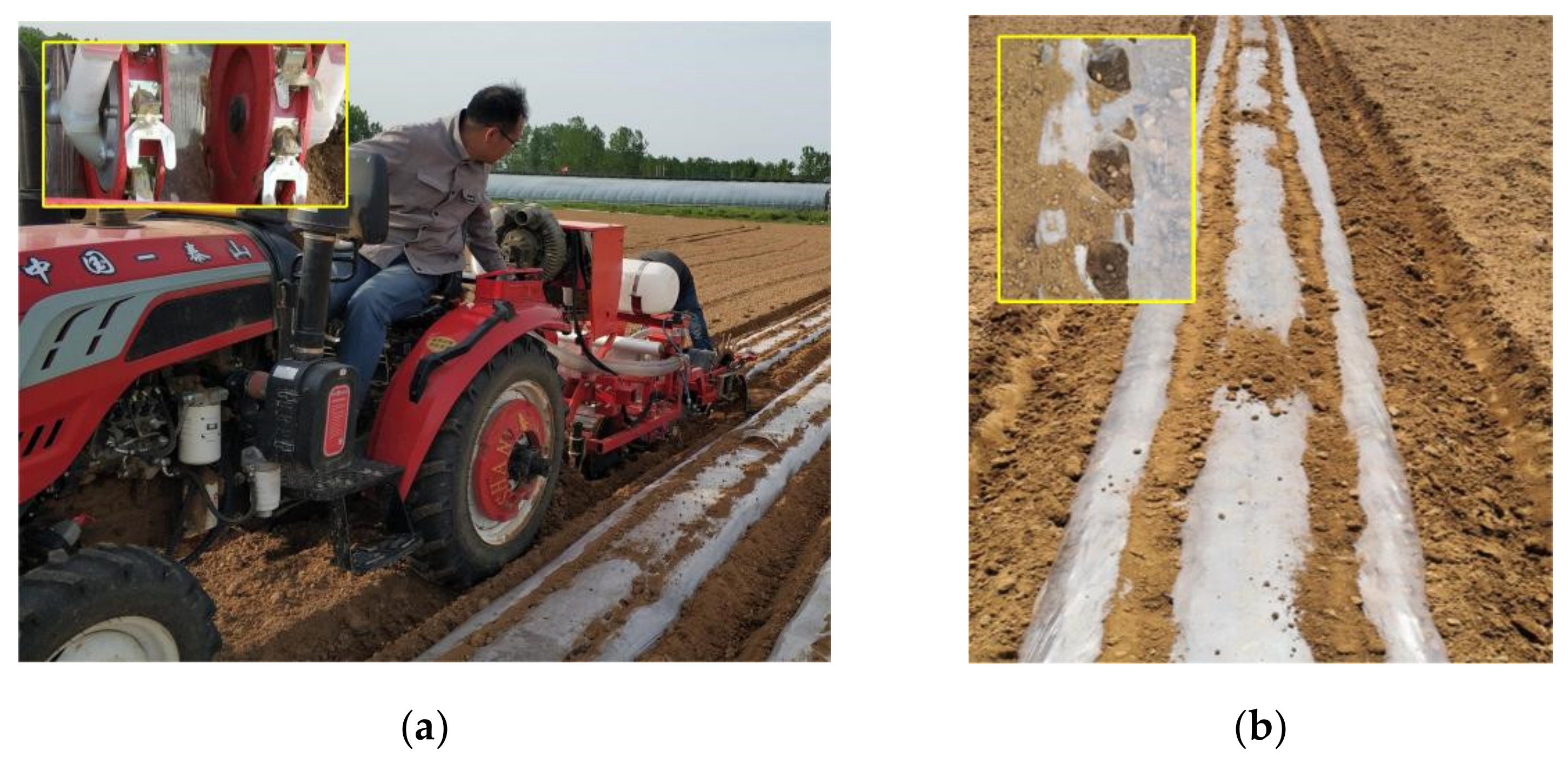
3.3. Field Trials Results
3.4. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, L.; Wang, L. Development status, existing problems and policy recommendations of peanut industry in China. Trans. CSAE 2020, 45, 116–122. [Google Scholar]
- Sun, T.; Li, G.; Ning, T.; Zhang, Z.; Mi, Q.; Rattan, L. Suitability of mulching with biodegradable film to moderate soil temperature and moisture and to increase photosynthesis and yield in peanut. Agric. Water Manag. 2018, 208, 214–223. [Google Scholar] [CrossRef]
- Wan, S.; Zhang, J.; Zhang, Z. A major change in peanut planting technology: Single seed precision sowing. Trans. Chin. J. Oil Crops 2020, 42, 927–933. [Google Scholar]
- Chen, X.; Lu, Y. Sowing performance of Air-suction Cylindrical Cotton Precision Dibbler. Trans. Chin. Soc. Agric. Mach. 2010, 41, 35–38. [Google Scholar]
- Chen, H.; Li, T.; Wang, H.; Wang, Y.; Wang, X. Design and parameter optimization of pneumatic cylinder ridge three-row close-planting seed-metering device for soybean. Trans. CASE 2018, 34, 16–24. [Google Scholar]
- Liao, Y.; Li, C.; Liao, Q.; Wang, L. Research Progress of Seed Guiding Technology and Device of Planter. Trans. Chin. Soc. Agric. Mach. 2020, 51, 1–14. [Google Scholar]
- Yang, L.; Yan, B.; Zhang, D.; Zhang, T.; Wang, Y.; Cui, T. Research Progress on Precision Planting Technology of Maize. Trans. Chin. Soc. Agric. Mach. 2016, 47, 38–48. [Google Scholar]
- Liao, Q.; Deng, Z.; Huang, H. Application of the high speed photography checking the precision metering performances. Trans. J. Huazhong Agric. Univ. 2004, 22, 570–573. [Google Scholar]
- Yu, J.; Ding, Y.; Liao, Y.; Cong, J.; Liao, Q. High-speed photography analysis of dropping trajectory on pneumatic metering device for rapeseed. Trans. J. Huazhong Agric. Univ. 2014, 33, 103–108. [Google Scholar]
- Liu, H.; Xu, X.; Liu, J.; Wang, C. Working characteristics of vertical shallow-basin type seed-metering device based on high-speed photography and virtual simulation. Trans. CSAE 2016, 32, 13–19. [Google Scholar]
- Li, F.; Chen, J.; Liu, F.; Liu, Y.; Zhang, T.; Zhao, M. lnfluence of seed adsorption posture on seeding performance based on high speed camera technology. Trans. J. China Agric. Univ. 2018, 23, 128–136. [Google Scholar]
- Sauder, D. Plattner. U.S. Patent 7152540B1, 26 December 2006. [Google Scholar]
- Kocher, M.; Coleman, J.; Smith, J.; Kachman, D. Corn seed spacing uniformity as affected by seed tube condition. Appl. Eng. Agric. 2011, 27, 177–183. [Google Scholar] [CrossRef]
- Ding, L.; Yang, L.; Zhang, D.; Cui, T.; Zhang, L.; Zhong, X. Effect of Seed Adsorption Posture of Corn Air-suction Metering Device on Seed Feeding Performance. Trans. Chin. Soc. Agric. Mach. 2021, 52, 40–50. [Google Scholar]
- Wang, Y.; Zhang, W.; Yan, W.; Qi, B. Design and Experiment of Seed Pressing Device for Precision Seeder Based on Air Flow Assisted Seed Delivery. Trans. Chin. Soc. Agric. Mach. 2020, 51, 69–76. [Google Scholar]
- Lv, J.; Yang, Y.; Shang, Q.; Li, Z.; Li, J.; Li, Z.; Wang, Z.; Wang, Y. Performance Optimization Test on Air-suction Potato Seed Metering Device with Positive Pressure Airflow and Zero-speed Seeding. Trans. CASE 2016, 32, 40–48. [Google Scholar]
- Gao, X.; Zhou, J.; Lai, Q. Design and experiment of pneumatic cylinder precision seed-metering device for panax notoginseng. Trans. CASE 2016, 32, 20–28. [Google Scholar]
- Yang, W.; Kan, C.; Zhang, X.; Wu, C.; Du, Q.; Pan, W. Design and Test of Precision Seed Metering Device for Panax notoginseng Seedling and Seeding by Air Suction. Trans. Chin. Soc. Agric. Mach. 2021, 52, 95–105. [Google Scholar]
- Li, Y.; Yang, L.; Zhang, D.; Cui, T.; Zhang, K.; Jie, C.; Yang, R. Analysis and test of linear seeding process of maize high speed precision metering device with air suction. Trans. CASE 2020, 36, 26–35. [Google Scholar]
- Chen, X.; Zhong, L. Design and test on belt-type seed delivery of air-suction metering device. Trans. CASE 2012, 28, 8–15. [Google Scholar]
- Kang, J.; Wen, H.; Wang, S.; Yan, L. Experimental study on impact of belt type conductor delivery on seeding uniformity. Trans. China J. Agric. Mach. Chem. 2015, 36, 42–45. [Google Scholar]
- Zhang, C.; Kang, J.; Peng, Q.; Zhang, N.; Wang, X.; Jian, S. Design and Test of Secondary Seed Feeding Mechanism of Air-suction Roller Dibbler for Cotton. Trans. Chin. Soc. Agric. Mach. 2021, 52, 106–116. [Google Scholar]
- Tong, C. Zero speed seeding technology and its theoretical design. Trans. Mech. Res. Appl. 1995, 1, 16–18. [Google Scholar]
- Zhao, S.; Chen, J.; Wang, J.; Chen, J.; Yang, C.; Yang, Y. Design and Experiment on V-groove Dialing Round Type Guiding-seed Device. Trans. Chin. Soc. Agric. Mach. 2018, 49, 146–158. [Google Scholar]
- Wang, F.; Lv, B.; Wang, H.; Zhao, M. Structural design and test of seed-suction hole ofair-sucking seed-metering device for millet. Trans. CASE 2017, 33, 30–36. [Google Scholar]
- Wu, M.; Cong, J.; Yan, Q.; Zhu, T.; Peng, X.; Wang, Y. Calibration and experiments for discrete element simulation parameters of peanut seed particles. Trans. CASE 2020, 36, 30–38. [Google Scholar]
- GB/T 6973-2005; Single (Precise) Test Method. National Standards of the People’s Republic of China: Beijing, China, 2005.
- Xing, H.; Zang, Y.; Cao, X.; Wang, Z.; Luo, X.; Zeng, S.; Huang, S. Experiment and analysis of dropping trajectory on rice pneumatic metering device. Trans. CASE 2015, 31, 23–30. [Google Scholar]
- Chen, Y.; Sun, X.; Luo, X.; Chen, X.; Li, M.; Li, Y. Design and dynamic balance analysis of cutter roller of vine-cutting machine. Trans. China J. Agric. Mach. Chem. 2015, 36, 15–17. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Project | Parameter | Numerical Value |
|---|---|---|
| Peanut properties | Poisson’s ratio | 0.362 |
| Density (kg·m−3) | 1.04 × 103 | |
| Shear modulus (Pa) | 5.06 × 107 | |
| Attributes of seed-guide mechanism | Poisson’s ratio | 0.394 |
| Density (kg·m−3) | 2.05 × 103 | |
| Shear modulus (Pa) | 7.9 × 108 | |
| Coefficient of restitution | Seed–seed | 0.501 |
| Seed–seed guide mechanism | 0.500 | |
| Coefficient of static friction | Seed–seed | 0.213 |
| Seed–seed guide mechanism | 0.300 | |
| Coefficient of rolling friction | Seed–seed | 0.035 |
| Seed–seed guide mechanism | 0.030 | |
| Other parameters | Gravitational acceleration (m·s−2) | 9.81 |
| Code | X1 (°) | X2 (°) | X3 (km·h−1) |
|---|---|---|---|
| −1 | 30 | 10 | 3 |
| 0 | 45 | 15 | 4 |
| +1 | 60 | 20 | 5 |
| Serial Number | X1 | X2 | X3 | Seeding Pass Rate (y1/%) | Missed Seeding Rate (y2/%) | Reseeding Rate (y3/%) |
|---|---|---|---|---|---|---|
| 1 | 45 | 15 | 4 | 95.15 | 3.21 | 1.64 |
| 2 | 45 | 15 | 4 | 94.43 | 2.67 | 2.9 |
| 3 | 45 | 15 | 4 | 95.32 | 2.89 | 1.79 |
| 4 | 60 | 15 | 5 | 91.38 | 4.89 | 3.73 |
| 5 | 45 | 10 | 5 | 92.72 | 4.41 | 2.87 |
| 6 | 45 | 20 | 3 | 91.52 | 4.57 | 3.91 |
| 7 | 30 | 15 | 5 | 88.35 | 6.13 | 5.52 |
| 8 | 60 | 20 | 4 | 91.81 | 4.22 | 3.97 |
| 9 | 30 | 20 | 4 | 88.26 | 6.21 | 5.53 |
| 10 | 30 | 10 | 4 | 91.67 | 4.6 | 3.73 |
| 11 | 45 | 15 | 4 | 94.84 | 2.34 | 2.82 |
| 12 | 45 | 15 | 4 | 94.37 | 3.11 | 2.52 |
| 13 | 60 | 15 | 3 | 92.62 | 4.08 | 3.3 |
| 14 | 45 | 20 | 5 | 90.29 | 5.27 | 4.73 |
| 15 | 30 | 15 | 3 | 89.43 | 5.93 | 4.64 |
| 16 | 45 | 10 | 3 | 93.86 | 3.09 | 3.05 |
| 17 | 60 | 10 | 4 | 93.17 | 3.49 | 3.34 |
| Variance Source | Sum of Squares (SS) | Freedom | F | p |
|---|---|---|---|---|
| Model | 81.39 | 9 | 71.51 | <0.0001 |
| X1 | 15.88 | 1 | 125.53 | <0.0001 |
| X2 | 11.38 | 1 | 89.95 | <0.0001 |
| X3 | 2.75 | 1 | 21.74 | 0.0023 |
| X1X2 | 1.05 | 1 | 8.31 | 0.0236 |
| X1X3 | 0.006 | 1 | 0.051 | 0.8284 |
| X2X3 | 0.002 | 1 | 0.016 | 0.9029 |
| X12 | 28.98 | 1 | 229.14 | <0.0001 |
| X22 | 3.97 | 1 | 31.39 | 0.0008 |
| X32 | 12.95 | 1 | 102.37 | <0.0001 |
| Residual | 0.89 | 7 | ||
| Misfit | 0.17 | 3 | 0.32 | 0.8117 |
| Error | 0.71 | 4 | ||
| Summation | 82.28 | 16 |
| Variance Source | SS | Freedom | F | p |
|---|---|---|---|---|
| Model | 23.53 | 9 | 29.59 | <0.0001 |
| X1 | 4.79 | 1 | 54.19 | 0.0002 |
| X2 | 2.74 | 1 | 30.98 | 0.0008 |
| X3 | 1.15 | 1 | 12.99 | 0.0087 |
| X1X2 | 0.19 | 1 | 2.19 | 0.1824 |
| X1X3 | 0.093 | 1 | 1.05 | 0.3391 |
| X2X3 | 0.096 | 1 | 1.09 | 0.3317 |
| X12 | 7.72 | 1 | 87.38 | <0.0001 |
| X22 | 0.78 | 1 | 8.88 | 0.0205 |
| X32 | 4.72 | 1 | 53.46 | 0.0002 |
| Residual | 0.62 | 7 | ||
| Misfit | 0.13 | 3 | 0.35 | 0.795 |
| Error | 0.49 | 4 | ||
| Summation | 24.15 | 16 |
| Variance Source | SS | Freedom | F | p |
|---|---|---|---|---|
| Model | 18.72 | 9 | 9.05 | 0.0042 |
| X1 | 3.23 | 1 | 14.03 | 0.0072 |
| X2 | 3.32 | 1 | 14.42 | 0.0067 |
| X3 | 0.48 | 1 | 2.07 | 0.1936 |
| X1X2 | 0.34 | 1 | 1.49 | 0.262 |
| X1X3 | 0.051 | 1 | 0.22 | 0.6532 |
| X2X3 | 0.25 | 1 | 1.09 | 0.3317 |
| X12 | 6.4 | 1 | 27.84 | 0.0012 |
| X22 | 1.39 | 1 | 6.07 | 0.0433 |
| X32 | 2.25 | 1 | 9.77 | 0.0167 |
| Residual | 1.61 | 7 | ||
| Misfit | 0.24 | 3 | 0.23 | 0.8684 |
| Error | 1.37 | 4 | ||
| Summation | 20.33 | 16 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiang, Y.; Kang, J.; Zhang, C.; Peng, Q.; Zhang, N.; Wang, X. Analysis and Optimization Test of the Peanut Seeding Process with an Air-Suction Roller Dibbler. Agriculture 2022, 12, 1942. https://doi.org/10.3390/agriculture12111942
Xiang Y, Kang J, Zhang C, Peng Q, Zhang N, Wang X. Analysis and Optimization Test of the Peanut Seeding Process with an Air-Suction Roller Dibbler. Agriculture. 2022; 12(11):1942. https://doi.org/10.3390/agriculture12111942
Chicago/Turabian StyleXiang, Yang, Jianming Kang, Chunyan Zhang, Qiangji Peng, Ningning Zhang, and Xiaoyu Wang. 2022. "Analysis and Optimization Test of the Peanut Seeding Process with an Air-Suction Roller Dibbler" Agriculture 12, no. 11: 1942. https://doi.org/10.3390/agriculture12111942
APA StyleXiang, Y., Kang, J., Zhang, C., Peng, Q., Zhang, N., & Wang, X. (2022). Analysis and Optimization Test of the Peanut Seeding Process with an Air-Suction Roller Dibbler. Agriculture, 12(11), 1942. https://doi.org/10.3390/agriculture12111942