

Soil Compaction under Different Traction Resistance Conditions—A Case Study in North Italy



Abstract
:1. Introduction
2. Materials and Methods
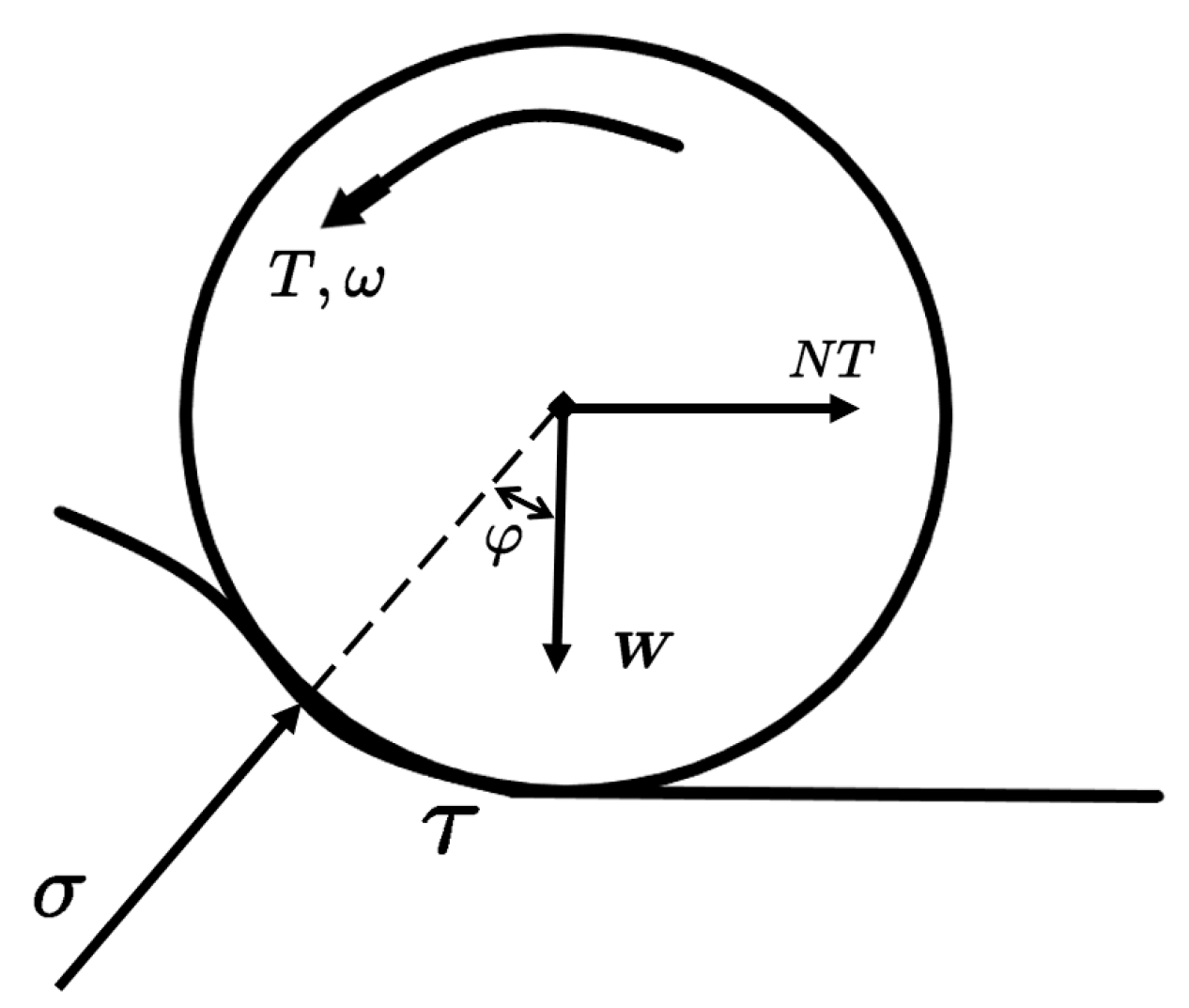
2.1. Mean Normal Stress
2.2. Soil Bulk Density and Soil Moisture
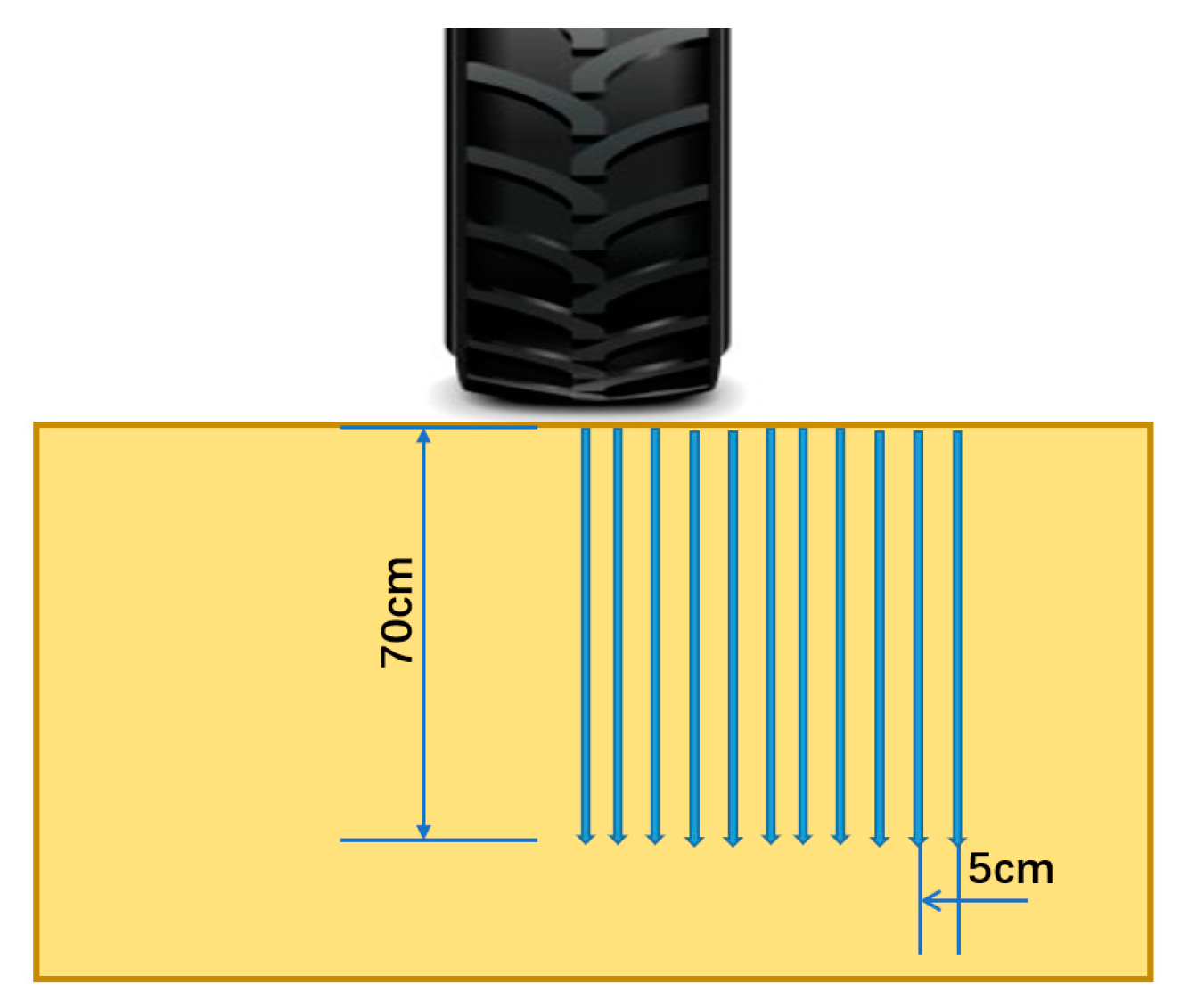
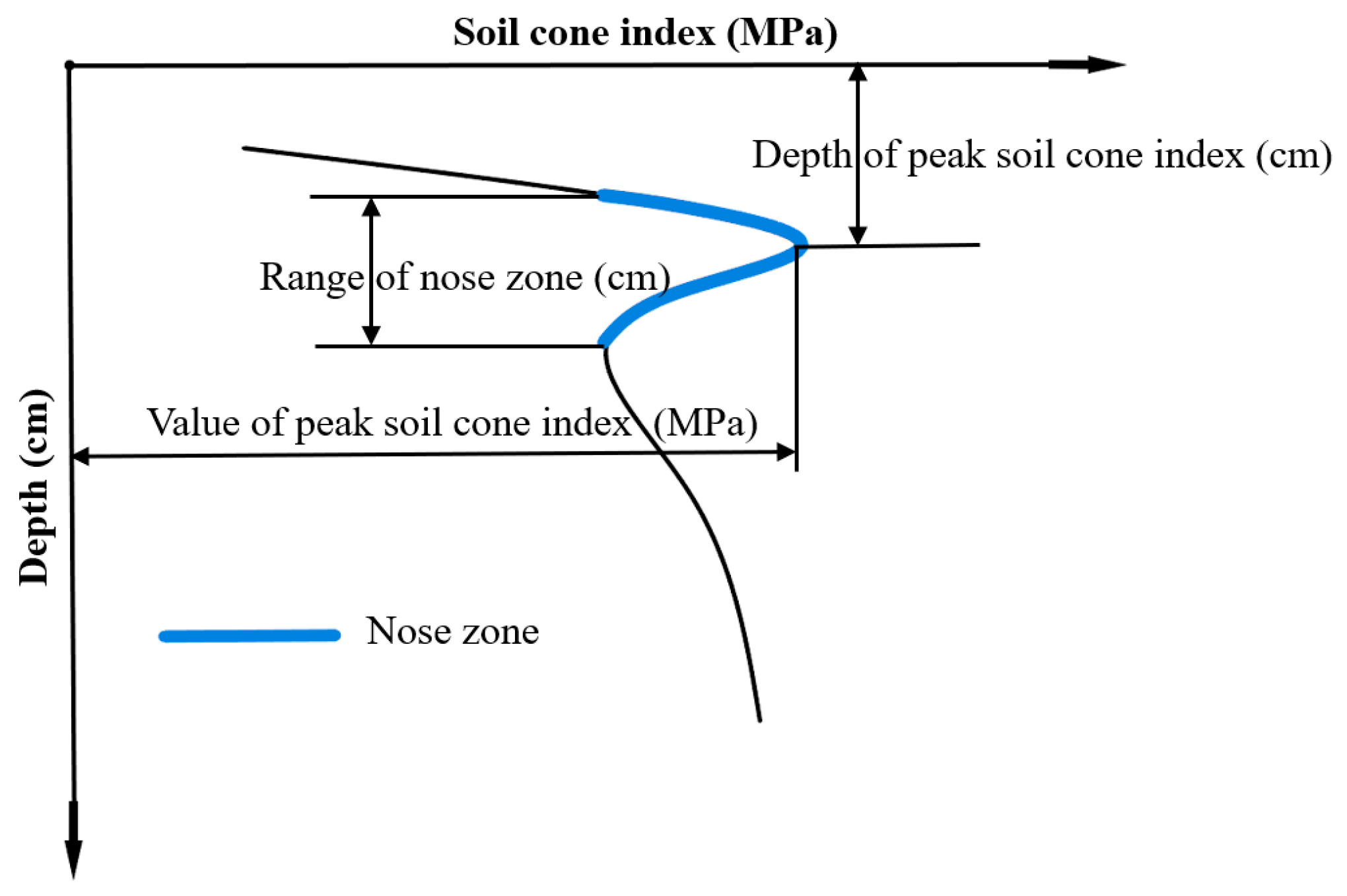
2.3. Soil Cone Index
2.4. Slip Rate
2.5. Statistics
3. Results
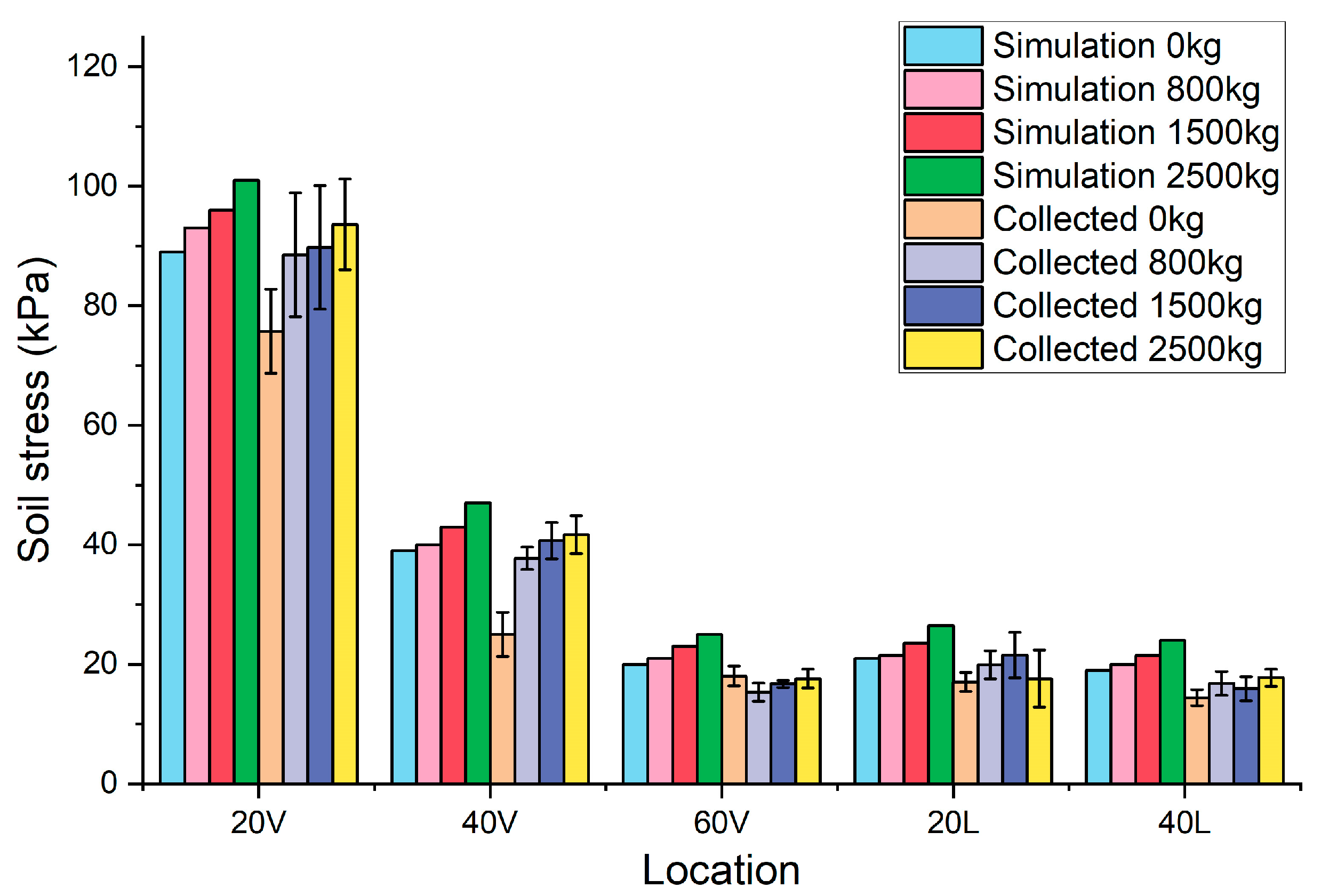
3.1. Stress under the Soil Using the Bolling Probe Sensor
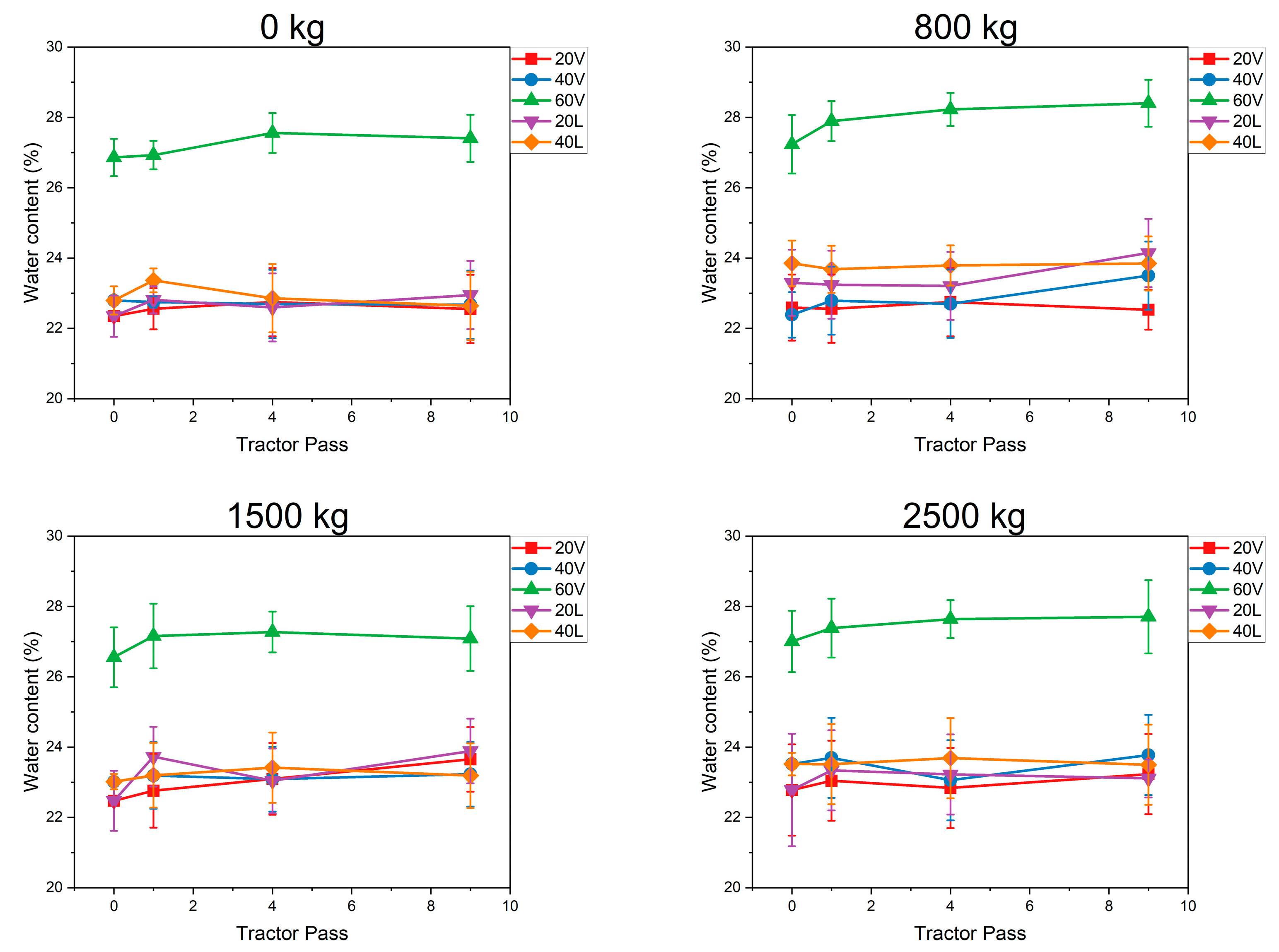
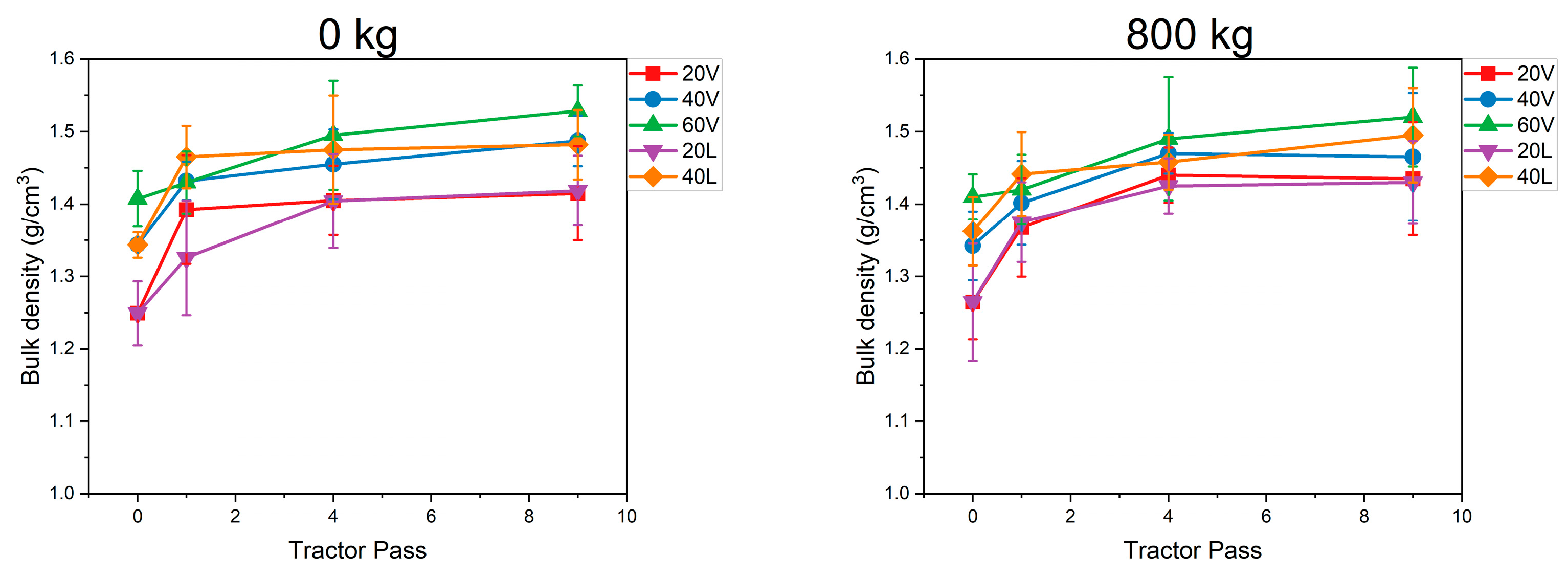
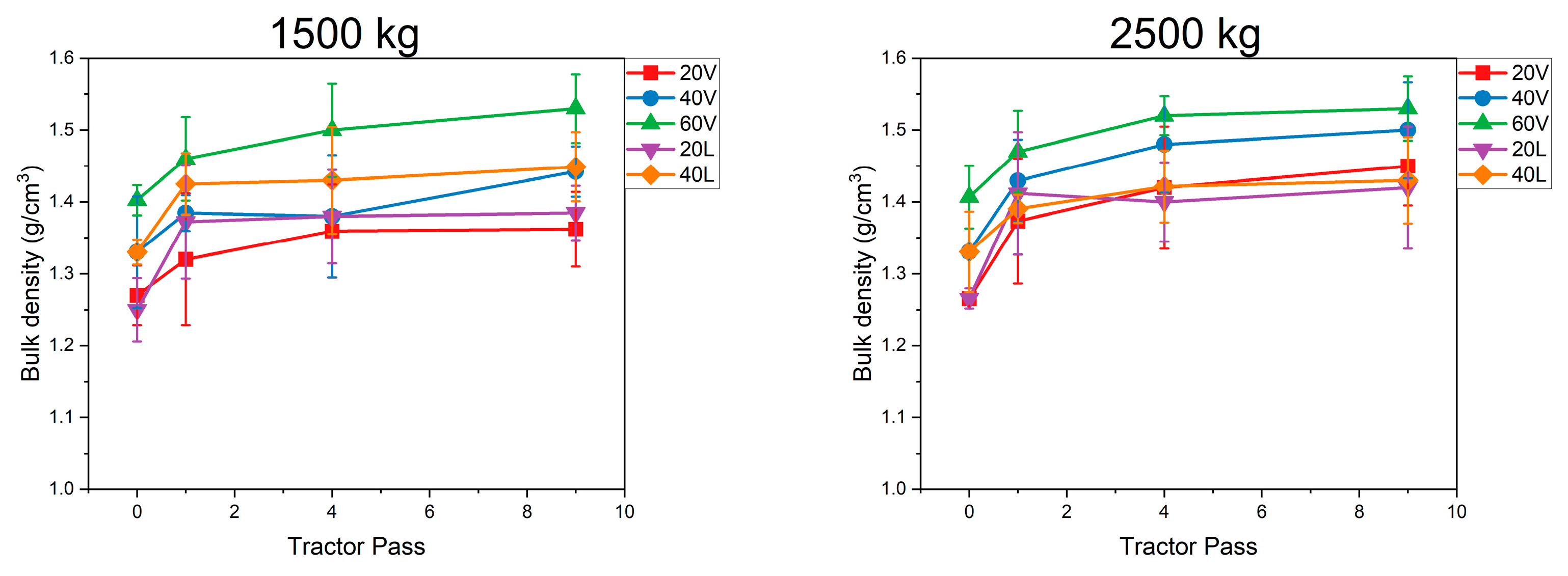
3.2. Soil Bulk Density and Soil Moisture
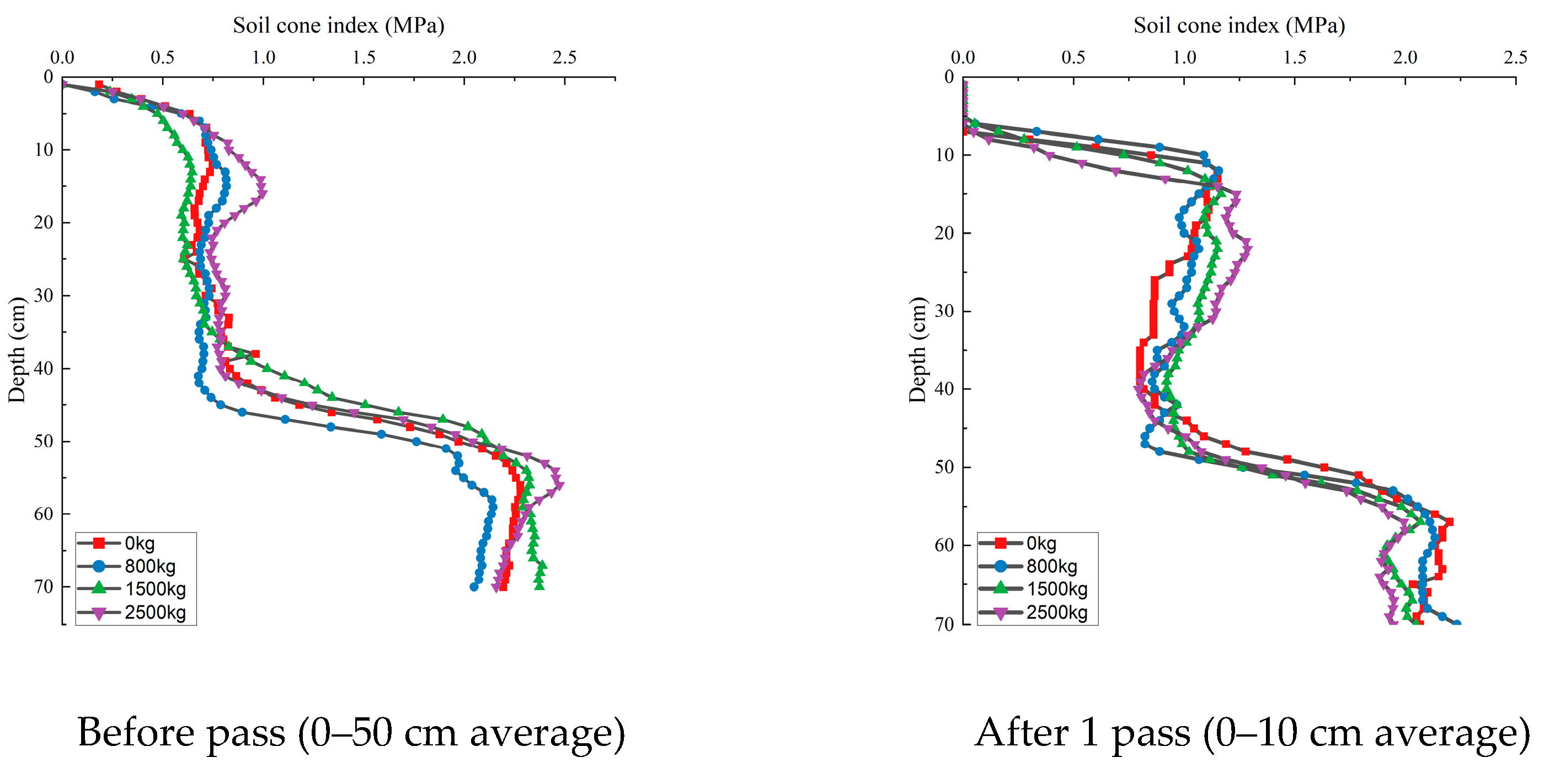
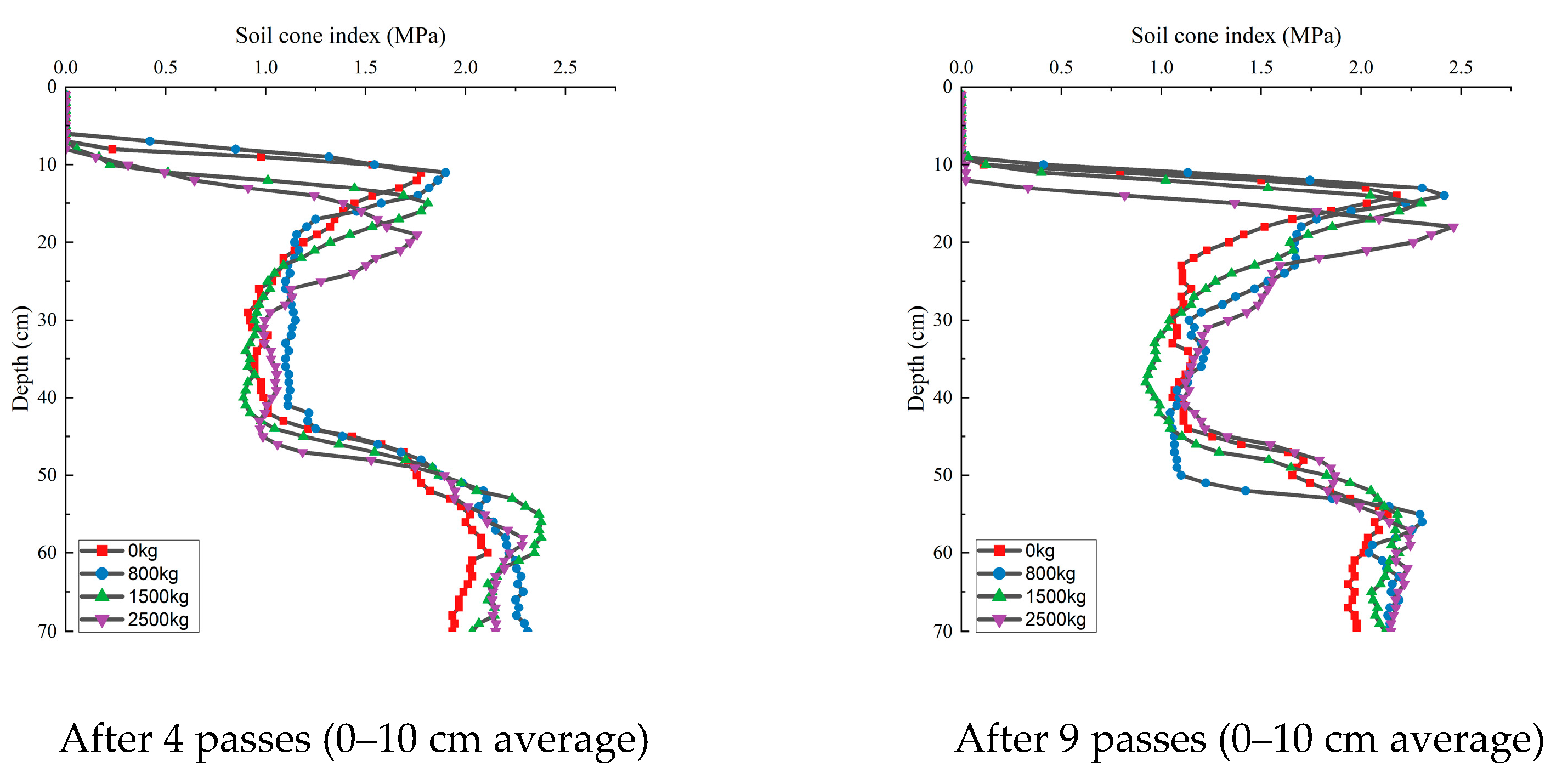
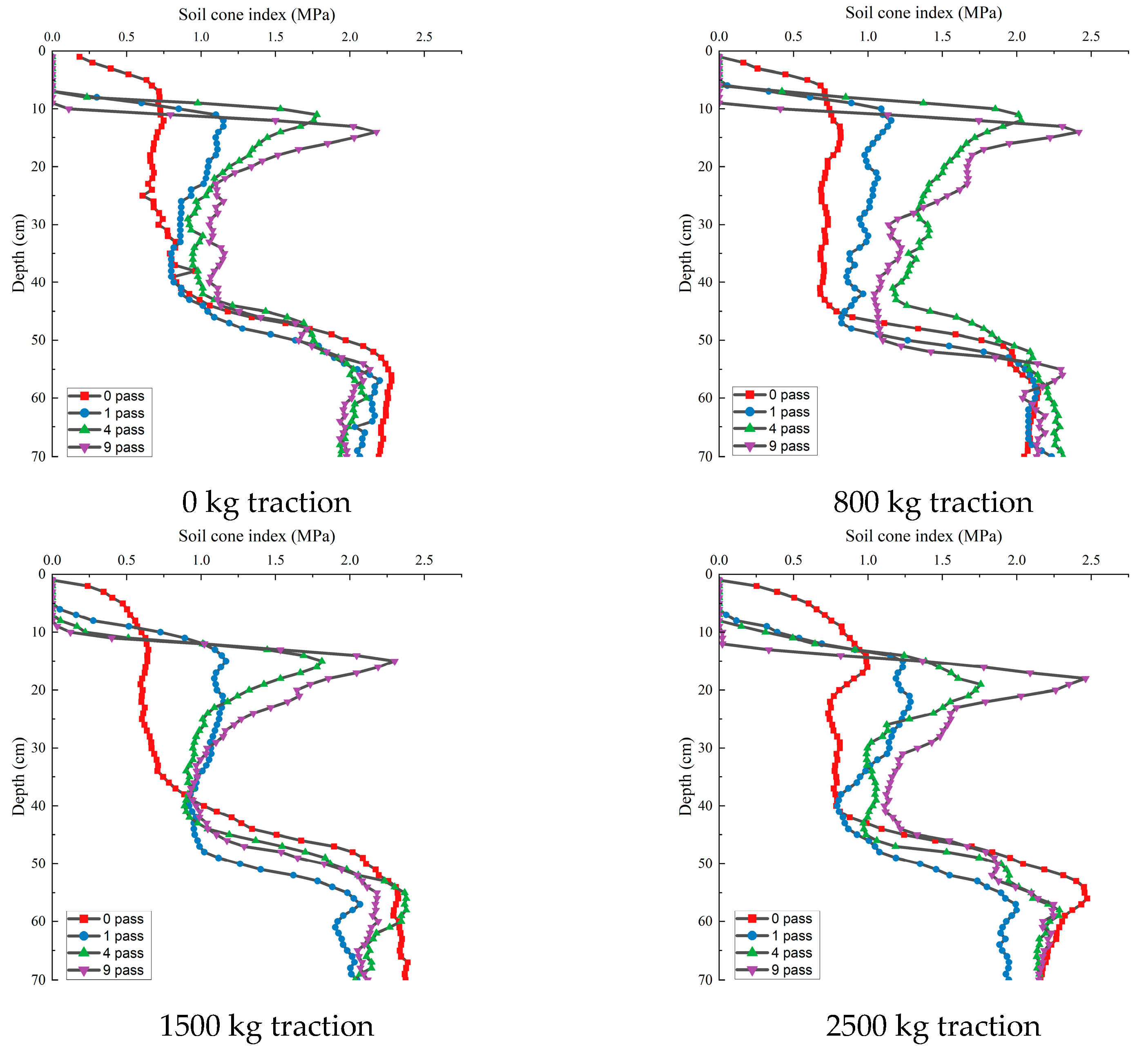
3.3. Soil Cone Index
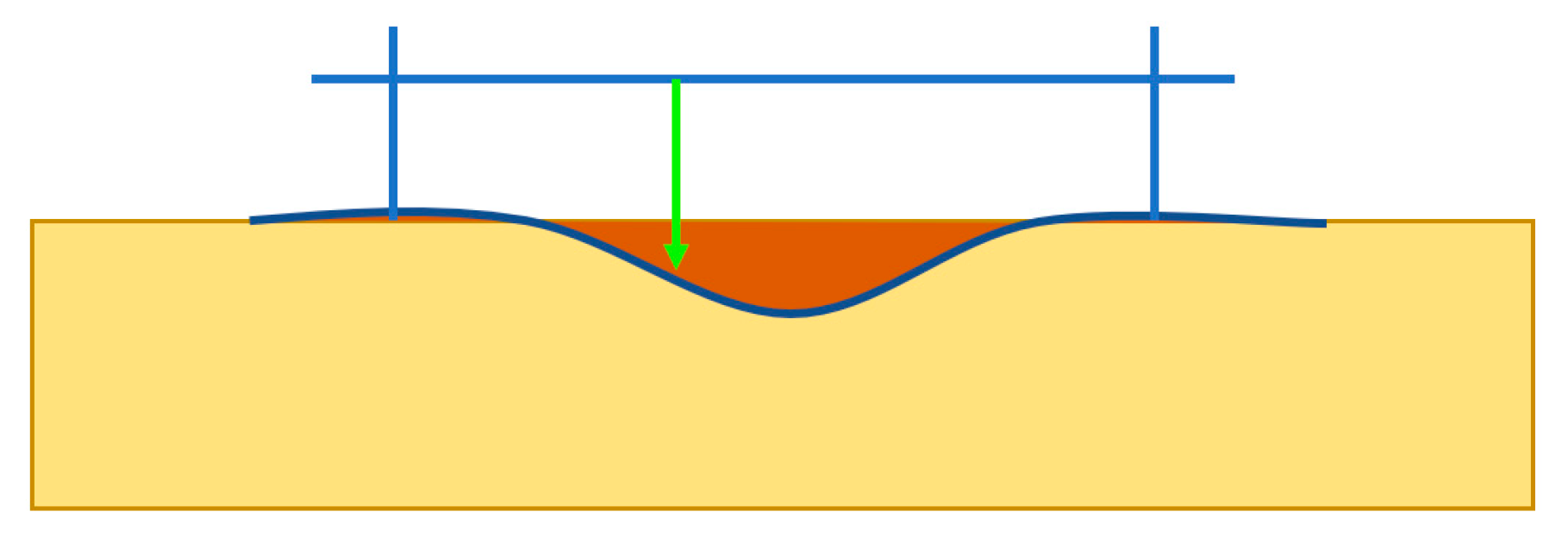
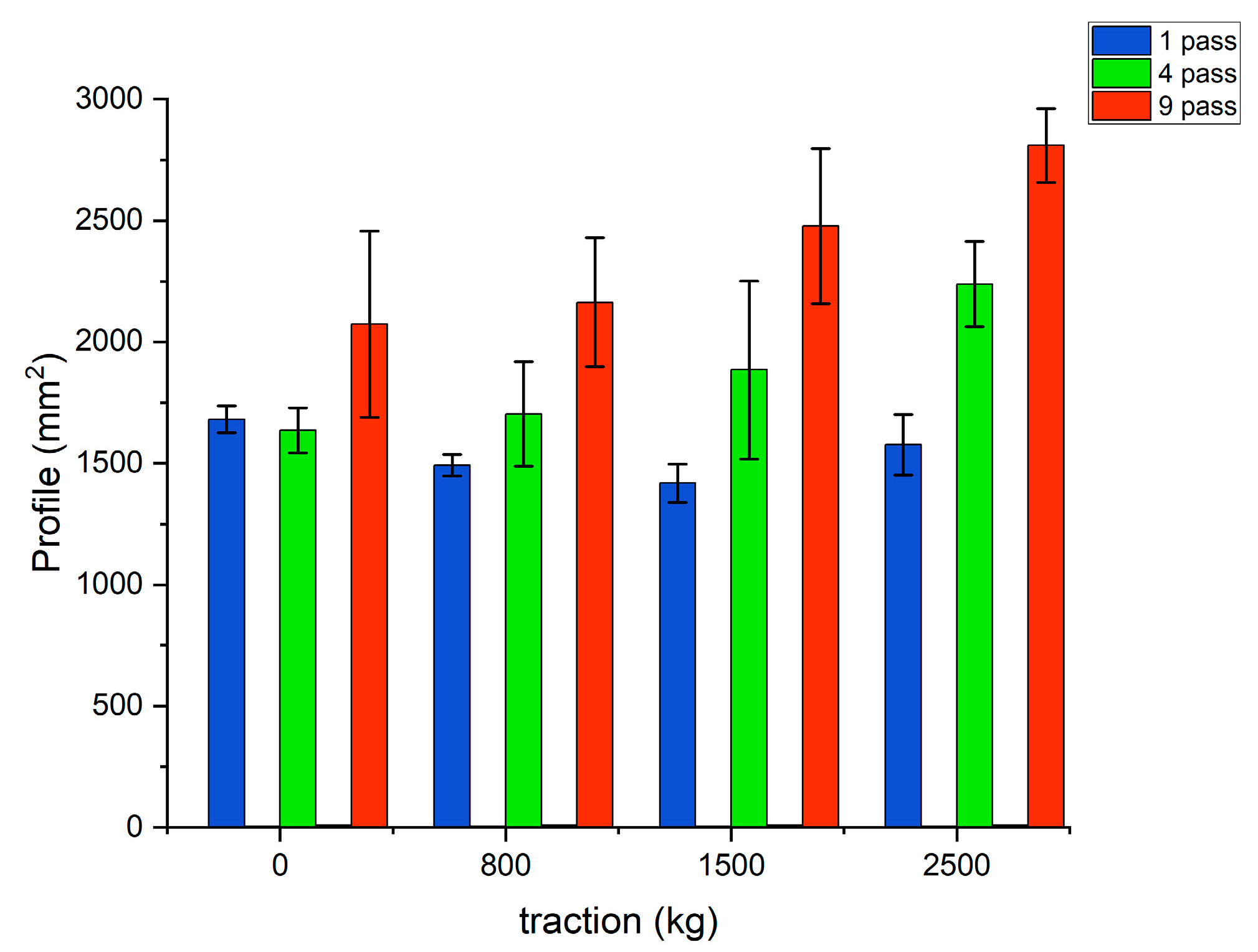
3.4. Profile Meter after the Compaction
3.5. Slip Rate
4. Discussion
4.1. Effect of Traction
4.2. Effect of Repeated Wheeling
4.3. Effect of Slippage
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Keller, T.; Sandin, M.; Colombi, T.; Horn, R.; Or, D. Historical Increase in Agricultural Machinery Weights Enhanced Soil Stress Levels and Adversely Affected Soil Functioning. Soil Tillage Res. 2019, 194, 104293. [Google Scholar] [CrossRef]
- DeArmond, D.; Emmert, F.; Lima, A.J.N.; Higuchi, N. Impacts of Soil Compaction Persist 30 Years after Logging Operations in the Amazon Basin. Soil Tillage Res. 2019, 189, 207–216. [Google Scholar] [CrossRef]
- Mossadeghi-Björklund, M.; Arvidsson, J.; Keller, T.; Koestel, J.; Lamandé, M.; Larsbo, M.; Jarvis, N. Effects of Subsoil Compaction on Hydraulic Properties and Preferential Flow in a Swedish Clay Soil. Soil Tillage Res. 2016, 156, 91–98. [Google Scholar] [CrossRef]
- Obour, P.B.; Kolberg, D.; Lamandé, M.; Børresen, T.; Edwards, G.; Sørensen, C.G.; Munkholm, L.J. Compaction and Sowing Date Change Soil Physical Properties and Crop Yield in a Loamy Temperate Soil. Soil Tillage Res. 2018, 184, 153–163. [Google Scholar] [CrossRef]
- Silva, R.P.; Rolim, M.M.; Gomes, I.F.; Pedrosa, E.M.R.; Tavares, U.E.; Santos, A.N. Numerical Modeling of Soil Compaction in a Sugarcane Crop Using the Finite Element Method. Soil Tillage Res. 2018, 181, 1–10. [Google Scholar] [CrossRef]
- Tekeste, M.Z.; Raper, R.L.; Schwab, E.B. Soil Drying Effects on Soil Strength and Depth of Hardpan Layers as Determined from Cone Index Data. Agric. Eng. Int. CIGR J. 2008, X, 1–17. [Google Scholar]
- Blanco-Canqui, H.; Claassen, M.M.; Stone, L.R. Controlled Traffic Impacts on Physical and Hydraulic Properties in an Intensively Cropped No-Till Soil. Soil Sci. Soc. Am. J. 2010, 74, 2142–2150. [Google Scholar] [CrossRef]
- Schjønning, P.; Lamandé, M. Models for Prediction of Soil Precompression Stress from Readily Available Soil Properties. Geoderma 2018, 320, 115–125. [Google Scholar] [CrossRef]
- Colombi, T.; Torres, L.C.; Walter, A.; Keller, T. Feedbacks between Soil Penetration Resistance, Root Architecture and Water Uptake Limit Water Accessibility and Crop Growth—A Vicious Circle. Sci. Total Environ. 2018, 626, 1026–1035. [Google Scholar] [CrossRef]
- Tullberg, J. Tillage, Traffic and Sustainability-A Challenge for ISTRO. Soil Tillage Res. 2010, 111, 26–32. [Google Scholar] [CrossRef]
- Antille, D.L.; Bennett, J.M.L.; Jensen, T.A. Soil Compaction and Controlled Traffic Considerations in Australian Cotton-Farming Systems. Crop Pasture Sci. 2016, 67, 1–28. [Google Scholar] [CrossRef]
- Keller, T. Approaches Towards Understanding Soil Compaction. 2018. Available online: https://www.elibrary.ru/item.asp?id=36537011 (accessed on 12 July 2022).
- Bluett, C.; Tullberg, J.N.; McPhee, J.E.; Antille, D.L. Soil and Tillage Research: Why Still Focus on Soil Compaction? Soil Tillage Res. 2019, 194, 104282. [Google Scholar] [CrossRef]
- Huber, S.; Prokop, G.; Arrouays, D.; Banko, G.; Bispo, A.; Jones, R.J.A.; Kibblewhite, M.G.; Lexer, W.; Möller, A.; Rickson, R.J.; et al. Environmental Assessment of Soil for Monitoring: Volume I Indicators and Criteria; HAL: Bengaluru, India, 2008; Volume I, ISBN 9789279097089. Available online: https://hal.inrae.fr/hal-02822804/document (accessed on 12 July 2022).
- Ankeny, M.D.; Kaspar, T.C.; Horton, R. Characterization of Tillage and Traffic Effects on Unconfined Infiltration Measurements. Soil Sci. Soc. Am. J. 1990, 54, 837–840. [Google Scholar] [CrossRef] [Green Version]
- Patel, M.S.; Singh, N.T. Changes in Bulk Density and Water Intake Rate of a Coarse Textured Soil in Relation to Different Levels of Compaction. J. Indian Soc. Soil Sci. 1981, 29, 110–112. [Google Scholar]
- Radford, B.J.; Bridge, B.J.; Davis, R.J.; McGarry, D.; Pillai, U.P.; Rickman, J.F.; Walsh, P.A.; Yule, D.F. Changes in the Properties of a Vertisol and Responses of Wheat after Compaction with Harvester Traffic. Soil Tillage Res. 2000, 54, 155–170. [Google Scholar] [CrossRef]
- Cambi, M.; Certini, G.; Fabiano, F.; Foderi, C.; Laschi, A.; Picchio, R. Impact of Wheeled and Tracked Tractors on Soil Physical Properties in a Mixed Conifer Stand. iFor.–Biogeosci. For. 2016, 9, 89–94. [Google Scholar] [CrossRef] [Green Version]
- Chaudhary, M.R.; Khera, R.; Singh, C.J. Tillage and Irrigation Effects on Root Growth, Soil Water Depletion and Yield of Wheat Following Rice. J. Agric. Sci. 1991, 116, 9–16. [Google Scholar] [CrossRef]
- Kirby, J.M. Strength and Deformation of Agricultural Soil: Measurement and Practical Significance. Soil Use Manag. 1991, 7, 223–229. [Google Scholar] [CrossRef]
- Lamandé, M.; Keller, T.; Berisso, F.; Stettler, M.; Schjønning, P. Accuracy of Soil Stress Measurements as Affected by Transducer Dimensions and Shape. Soil Tillage Res. 2015, 145, 72–77. [Google Scholar] [CrossRef]
- de Lima, R.P.; Keller, T. Soil Stress Measurement by Load Cell Probes as Influenced by Probe Design, Probe Position, and Soil Mechanical Behaviour. Soil Tillage Res. 2021, 205, 104796. [Google Scholar] [CrossRef]
- Nichols, T.A.; Bailey, A.C.; Johnson, C.E.; Grisso, R.D. Stress State Transducer for Soil. Trans. Am. Soc. Agric. Eng. 1987, 30, 1237–1241. [Google Scholar] [CrossRef]
- Harris, H.D.; Bakker, D.M. A Soil Stress Transducer for Measuring in Situ Soil Stresses. Soil Tillage Res. 1994, 29, 35–48. [Google Scholar] [CrossRef]
- Berli, M.; Eggers, C.G.; Accorsi, M.L.; Or, D. Theoretical Analysis of Fluid Inclusions for In Situ Soil Stress and Deformation Measurements. Soil Sci. Soc. Am. J. 2006, 70, 1441–1452. [Google Scholar] [CrossRef]
- Raper, R.L.; Arriaga, F.J. Comparing Peak and Residual Soil Pressures Measured by Pressure Bulbs and Stress-State Transducers. Trans. ASABE 2007, 50, 339–344. [Google Scholar] [CrossRef] [Green Version]
- Bolling, I. Bodenverdichtung Und Triebkraftverhalten Bei Reifen-Neue Meß-Und Rechenmethoden. Doctoral Dissertation, Lehrstuhl für Landmaschinen, Technische Universität, Dresden, Germany, 1987. [Google Scholar]
- Braunack, M.V.; Johnston, D.B. Changes in Soil Cone Resistance Due to Cotton Picker Traffic during Harvest on Australian Cotton Soils. Soil Tillage Res. 2014, 140, 29–39. [Google Scholar] [CrossRef]
- Munkholm, L.J.; Schjønning, P. Structural Vulnerability of a Sandy Loam Exposed to Intensive Tillage and Traffic in Wet Conditions. Soil Tillage Res. 2004, 79, 79–85. [Google Scholar] [CrossRef]
- He, T.; Ding, Q.; Li, Y.; He, R.; Xue, J.; Qiu, W. Stress Transmission Coefficient: A Soil Stress Transmission Property for a Loading Process. Soil Tillage Res. 2017, 166, 179–184. [Google Scholar] [CrossRef]
- Arvidsson, J.; Keller, T. Soil Stress as Affected by Wheel Load and Tyre Inflation Pressure. Soil Tillage Res. 2007, 96, 284–291. [Google Scholar] [CrossRef]
- ten Damme, L.; Stettler, M.; Pinet, F.; Vervaet, P.; Keller, T.; Munkholm, L.J.; Lamandé, M. Construction of Modern Wide, Low-Inflation Pressure Tyres per Se Does Not Affect Soil Stress. Soil Tillage Res. 2020, 204, 104708. [Google Scholar] [CrossRef]
- Lamandé, M.; Schjønning, P. Transmission of Vertical Stress in a Real Soil Profile. Part I: Site Description, Evaluation of the Söhne Model, and the Effect of Topsoil Tillage. Soil Tillage Res. 2011, 114, 57–70. [Google Scholar] [CrossRef]
- Chamen, T. Controlled Traffic Farming—From Worldwide Research to Adoption in Europe and Its Future Prospects. Acta Technol. Agric. 2015, 18, 64–73. [Google Scholar] [CrossRef] [Green Version]
- McHugh, A.D.; Tullberg, J.N.; Freebairn, D.M. Controlled Traffic Farming Restores Soil Structure. Soil Tillage Res. 2009, 104, 164–172. [Google Scholar] [CrossRef]
- Raper, R.L.; Reeves, D.W. In-Row Subsoiling and Controlled Traffic Effects on Coastal Plain Soils. Trans. ASABE 2007, 50, 1109–1115. [Google Scholar] [CrossRef] [Green Version]
- Tullberg, J.N.; Yule, D.F.; McGarry, D. Controlled Traffic Farming-From Research to Adoption in Australia. Soil Tillage Res. 2007, 97, 272–281. [Google Scholar] [CrossRef]
- Taylor, J.H. Benefits of Permanent Traffic Lanes in a Controlled Traffic Crop Production System. Soil Tillage Res. 1983, 3, 385–395. [Google Scholar]
- Lamandé, M.; Schjønning, P. Soil Mechanical Stresses in High Wheel Load Agricultural Field Traffic: A Case Study. Soil Res. 2018, 56, 129–135. [Google Scholar] [CrossRef]
- Keller, T.; Ruiz, S.; Stettler, M.; Berli, M. Determining Soil Stress beneath a Tire: Measurements and Simulations. Soil Sci. Soc. Am. J. 2016, 80, 541–553. [Google Scholar] [CrossRef]
- De Pue, J.; Cornelis, W.M. DEM Simulation of Stress Transmission under Agricultural Traffic Part 1: Comparison with Continuum Model and Parametric Study. Soil Tillage Res. 2019, 195, 104408. [Google Scholar] [CrossRef] [Green Version]
- Keller, T. A Model for the Prediction of the Contact Area and the Distribution of Vertical Stress below Agricultural Tyres from Readily Available Tyre Parameters. Biosyst. Eng. 2005, 92, 85–96. [Google Scholar] [CrossRef]
- Brunotte, J.; Nolting, K.; Fröba, N.; Ortmeier, B. Bodenschtuz Beim Pflügen: Wie Hoch Ist Die Radlast Am Furchenrad? Die Landtechnik 2012, 67, 265–269. [Google Scholar]
- VDI. Machine Operation with Regard to the Trafficability of Soils Used for Agriculture; VDI Verein Deutscher Ingenieure: Düsseldorf, Germany, 2014. [Google Scholar]
- Way, T.R.; Kishimoto, T. Interface Pressures of a Tractor Drive Tyre on Structured and Loose Soils. Biosyst. Eng. 2004, 87, 375–386. [Google Scholar] [CrossRef]
- Nadykto, V.; Arak, M.; Olt, J. Theoretical Research into the Frictional Slipping of Wheel-Type Undercarriage Taking into Account the Limitation of Their Impact on the Soil. Agron. Res. 2015, 13, 148–157. [Google Scholar]
- Lamandé, M.; Schjønning, P. Transmission of Vertical Stress in a Real Soil Profile. Part III: Effect of Soil Water Content. Soil Tillage Res. 2011, 114, 78–85. [Google Scholar] [CrossRef]
- Ekinci, Ş.; Çarman, K.; Kahramanli, H. Investigation and Modeling of the Tractive Performance of Radial Tires Using Off-Road Vehicles. Energy 2015, 93, 1953–1963. [Google Scholar] [CrossRef]
- Zoz, F.M.; Grisso, R.D. Asae Distinguished Lecture Series Traction and Tractor Performance. 2003. Available online: http://www.leb.esalq.usp.br/disciplinas/Molin/leb5004/Material_para_leitura/Traction_Tractor_Performance.pdf (accessed on 16 July 2022).
- Bulgakov, V.; Olt, J.; Kuvachov, V.; Smolinskyi, S. A Theoretical and Experimental Study of the Traction Properties of Agricultural Gantry Systems. Agraarteadus 2020, 31, 10–16. [Google Scholar] [CrossRef]
- Grosch, K.A. The Rolling Resistance, Wear and Traction Properties of Tread Compounds. Rubber Chem. Technol. 1996, 69, 495–568. [Google Scholar] [CrossRef]
- Battiato, A.; Diserens, E. Tractor Traction Performance Simulation on Differently Textured Soils and Validation: A Basic Study to Make Traction and Energy Requirements Accessible to the Practice. Soil Tillage Res. 2017, 166, 18–32. [Google Scholar] [CrossRef]
- Czarnecki, J.; Brennensthul, M.; Białczyk, W.; Ptak, W.; Gil, Ł. Analysis of Traction Properties and Power of Wheels Used on Various Agricultural Soils. Agric. Eng. 2019, 23, 13–23. [Google Scholar] [CrossRef] [Green Version]
- Hussein, M.A.; Antille, D.L.; Kodur, S.; Chen, G.; Tullberg, J.N. Controlled Traffic Farming Effects on Productivity of Grain Sorghum, Rainfall and Fertiliser Nitrogen Use Efficiency. J. Agric. Food Res. 2021, 3, 100111. [Google Scholar] [CrossRef]
- Vermeulen, G.D.; Tullberg, J.; Chamen, W. Controlled Traffic Farming. In Soil Engineering. Soil Biology; Springer: Berlin/Heidelberg, Germany, 2010; Volume 19, ISBN 0305-7364. [Google Scholar]
- Halpin, N.V.; Cameron, T.; Russo, P.F. Economic Evaluation of Precision Controlled Traffic Farming in the Australian Sugar Industry: A Case Study of an Early Adopter. In Proceedings of the 30th Conference of the Australian Society of Sugar Cane Technologists, Townsville, Australia, 29 April–2 May 2008; Volume 66. [Google Scholar]
- Anken, T.; Holpp, M. Controlled Traffic Farming in Canada. In Encyclopedia of Agrophysics; Encyclopedia of Earth Sciences Series; Springer: Dordrecht, The Netherlands, 2011; pp. 153–155. [Google Scholar] [CrossRef]
- Schreiber, M.; Kutzbach, H.D. Influence of Soil and Tire Parameters on Traction. Res. Agric. Eng. 2008, 54, 43–49. [Google Scholar] [CrossRef] [Green Version]
- Khafizov, C.; Khafizov, R.; Nurmiev, A.; Galiev, I. Optimization of main parameters of tractor and unit for plowing soil, taking into account their influence on yield of grain crops. In Proceedings of the 19th International Scientific Conference Engineering for Rural Development, Jelgava, Latvia, 20−22 May 2020; Malinovska, L., Osadcuks, V., Eds.; pp. 585–590. [Google Scholar]
- Nurmiev, A.; Khafizov, C.; Khafizov, R.; Ziganshin, B. Optimization of Main Parameters of Tractor Working with Soil-Processing Implement. In Proceedings of the 17th International Scientific Conference: Engineering for Rural Development, Jelgava, Latvia, 23−25 May 2018; Malinovska, L., Osadcuks, V., Eds.; pp. 161–167. [Google Scholar]
- Schjonning, P.; Munkholm, L.J.; Lamande, M. Soil Characteristics and Root Growth in a Catena across and Outside the Wheel Tracks for Different Slurry Application Systems. Soil Tillage Res. 2022, 221, 105422. [Google Scholar] [CrossRef]
- Arvidsson, J.; Westlin, H.; Keller, T.; Gilbertsson, M. Rubber Track Systems for Conventional Tractors—Effects on Soil Compaction and Traction. Soil Tillage Res. 2011, 117, 103–109. [Google Scholar] [CrossRef]
- Serrano, J.M.; Peca, J.O.; Silva, J.R.; Marquez, L. The Effect of Liquid Ballast and Tyre Inflation Pressure on Tractor Performance. Biosyst. Eng. 2009, 102, 51–62. [Google Scholar] [CrossRef]
- Md-Tahir, H.; Zhang, J.; Xia, J.; Zhang, C.; Zhou, H.; Zhu, Y. Rigid Lugged Wheel for Conventional Agricultural Wheeled Tractors—Optimising Traction Performance and Wheel-Soil Interaction in Field Operations. Biosyst. Eng. 2019, 188, 14–23. [Google Scholar] [CrossRef]
- ten Damme, L.; Schjønning, P.; Munkholm, L.J.; Green, O.; Nielsen, S.K.; Lamandé, M. Soil Structure Response to Field Traffic: Effects of Traction and Repeated Wheeling. Soil Tillage Res. 2021, 213, 105128. [Google Scholar] [CrossRef]
- Available online: https://www.google.it/earth/about/versions/GoogleEarthPro (accessed on 18 October 2022).
- Piccoli, I.; Sartori, F.; Polese, R.; Berti, A. Crop Yield after 5 Decades of Contrasting Residue Management. Nutr. Cycl. Agroecosyst. 2020, 117, 231–241. [Google Scholar] [CrossRef]
- Olsen, H.J. Calculation of Subsoil Stresses. Soil Tillage Res. 1994, 29, 111–123. [Google Scholar] [CrossRef]
- Défossez, P.; Richard, G.; Boizard, H.; O’Sullivan, M.F. Modeling Change in Soil Compaction Due to Agricultural Traffic as Function of Soil Water Content. Geoderma 2003, 116, 89–105. [Google Scholar] [CrossRef]
- de Lima, R.P.; Keller, T. Impact of Sample Dimensions, Soil-Cylinder Wall Friction and Elastic Properties of Soil on Stress Field and Bulk Density in Uniaxial Compression Tests. Soil Tillage Res. 2019, 189, 15–24. [Google Scholar] [CrossRef]
- Kirby, J.M. Soil Stress Measurement: Part I. Transducer in a Uniform Stress Field. J. Agric. Eng. Res. 1999, 72, 151–160. [Google Scholar] [CrossRef]
- Naderi-Boldaji, M.; Alimardani, R.; Hemmat, A.; Sharifi, A.; Keyhani, A.; Tekeste, M.Z.; Keller, T. 3D Finite Element Simulation of a Single-Tip Horizontal Penetrometer-Soil Interaction. Part II: Soil Bin Verification of the Model in a Clay-Loam Soil. Soil Tillage Res. 2014, 144, 211–219. [Google Scholar] [CrossRef]
- Stettler, M.; Keller, T.; Weisskopf, P.; Lamandé, M.; Lassen, P.; Schjønning, P. Terranimo®—A Web-Based Tool for Evaluating Soil Compaction. Landtechnik 2014, 69, 132–138. [Google Scholar]
- Lassen, P.; Lamandé, M.; Stettler, M.; Keller, T.; Jørgensen, M.S.; Lilja, H. Terranimo ®—A Soil Compaction Model with Internationally Compatible Input Options. In Proceedings of the EFITAWCCA-CIGR Conference “Sustainable Agriculture through ICT Innovation”, Turin, Italy, 24–27 June 2013; pp. 24–27. [Google Scholar]
- Keller, T.; Arvidsson, J. A Model for Prediction of Vertical Stress Distribution near the Soil Surface below Rubber-Tracked Undercarriage Systems Fitted on Agricultural Vehicles. Soil Tillage Res. 2016, 155, 116–123. [Google Scholar] [CrossRef]
- Schjønning, P.; Lamandé, M.; Lassen, P. An Introduction to Terranimo; Unpublished note; Aarhus University Dept. Agroecology: Aarhus, Denmark, 2016; Available online: https://www.terranimo.dk/Dialogs/TerranimoIntroduction.pdf (accessed on 13 August 2022).
- Keller, T.; Trautner, A.; Arvidsson, J. Stress Distribution and Soil Displacement under a Rubber-Tracked and a Wheeled Tractor during Ploughing, Both on-Land and within Furrows. Soil Tillage Res. 2002, 68, 39–47. [Google Scholar] [CrossRef]
- Jabro, J.D.; Stevens, W.B.; Iversen, W.M.; Sainju, U.M.; Allen, B.L. Soil Cone Index and Bulk Density of a Sandy Loam under No-till and Conventional Tillage in a Corn-Soybean Rotation. Soil Tillage Res. 2021, 206, 104842. [Google Scholar] [CrossRef]
- Davies, D.B.; Finney, J.B.; Richardson, S.J. Relative Effects of Tractor Weight and Wheel-Slip in Causing Soil Compaction. J. Soil Sci. 1973, 24, 399–409. [Google Scholar] [CrossRef]
- Battiato, A.; Alaoui, A.; Diserens, E. Impact of Normal and Shear Stresses Due to Wheel Slip on Hydrological Properties of an Agricultural Clay Loam: Experimental and New Computerized Approach. J. Agric. Sci. 2015, 7, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Bodria, L.; Pellizzi, G.; Piccarolo, P. Meccanica e Meccanizzazione Agricola; Edagricole Il Sole 24 Ore: Ferrara, Italy, 2013; ISBN 8850654138. [Google Scholar]
- Institute for European Environmental Policy; Soares, C.D. Ecologic; Intravital microscopic techniques Environmentally Harmful Subsidies: Identification and Assessment Annex 5: Subsidy Level Indicators for the Case Studies. Eur. Comm. DG Environ. 2012, 1–26. Available online: https://ec.europa.eu/environment/enveco/taxation/pdf/Harmful%20Subsidies%20Report.pdf (accessed on 15 August 2022).
- IBM Corp. Released 2019. IBM SPSS Statistics for Windows, Version 26.0; N.I.C. SPSS: Armonk, NY, USA, 2019. [Google Scholar]
- Mohawesh, O.; Ishida, T.; Fukumura, K.; Yoshino, K. Assessment of Spatial Variability of Penetration Resistance and Hardpan Characteristics in a Cassava Field. Aust. J. Soil Res. 2008, 46, 210–218. [Google Scholar] [CrossRef]
- Keller, T.; Défossez, P.; Weisskopf, P.; Arvidsson, J.; Richard, G. SoilFlex: A Model for Prediction of Soil Stresses and Soil Compaction Due to Agricultural Field Traffic Including a Synthesis of Analytical Approaches. Soil Tillage Res. 2007, 93, 391–411. [Google Scholar] [CrossRef]
- ten Damme, L.; Schjønning, P.; Munkholm, L.J.; Green, O.; Nielsen, S.K.; Lamandé, M. Traction and Repeated Wheeling—Effects on Contact Area Characteristics and Stresses in the Upper Subsoil. Soil Tillage Res. 2021, 211, 105020. [Google Scholar] [CrossRef]
- Keller, T.; Berli, M.; Ruiz, S.; Lamandé, M.; Arvidsson, J.; Schjønning, P.; Selvadurai, A.P.S. Transmission of Vertical Soil Stress under Agricultural Tyres: Comparing Measurements with Simulations. Soil Tillage Res. 2014, 140, 106–117. [Google Scholar] [CrossRef]
- Schjønning, P.; Lamandé, M.; Keller, T.; Labouriau, R. Subsoil Shear Strength—Measurements and Prediction Models Based on Readily Available Soil Properties. Soil Tillage Res. 2020, 200, 104638. [Google Scholar] [CrossRef]
- Battiato, A. Soil-Tyre Interaction Analysis for Agricultural Tractors: Modelling of Traction Performance and Soil Damage. 2014. Available online: https://www.research.unipd.it/handle/11577/3425279?1/Battiato_Andrea_tesi.pdf (accessed on 22 August 2022).
- Zoz, F.M.; Grisso, R. Traction and Tractor Performance. Agric. Equip. Technol. Conf. 2003, 27, 1–47. [Google Scholar]
- Way, T.R.; Bailey, A.C.; Raper, R.L.; Burt, E.C. Tire Lug Height Effect on Soil Stresses and Bulk Density. Trans. ASAE 1995, 38, 669–674. [Google Scholar] [CrossRef]
- Pytka, J.; Dabrowski, J.; Zajac, M.; Tarkowski, P. Effects of Reduced Inflation Pressure and Vehicle Loading on Off-Road Traction and Soil Stress and Deformation State. J. Terramechanics 2006, 43, 469–485. [Google Scholar] [CrossRef]
- Horn, R.; Richards, B.G.; Gräsle, W.; Baumgartl, T.; Wiermann, C. Theoretical Principles for Modelling Soil Strength and Wheeling Effects—A Review. J. Plant Nutr. Soil Sci. 1998, 161, 333–346. [Google Scholar] [CrossRef]
- Tijink, F.G.J. Quantification of Vehicle Running Gear. In Developments in Agricultural Engineering; Elsevier: Amsterdam, The Netherlands, 1994; Volume 11, pp. 391–415. [Google Scholar]
- Raghavan, G.S.V.; McKyes, E.; Chassé, M. Effect of Wheel Slip on Soil Compaction. J. Agric. Eng. Res. 1977, 22, 79–83. [Google Scholar] [CrossRef]
- Bashford, L.L.; Jenane, C. Field Tractive Performance Comparisons between a Tractor Operated in the 2WD and 4WD Mode. Rev. Maroc. Sci. Agron. Vétérinaires 1995, 15, 47–54. [Google Scholar]
- Battiato, A.; Diserens, E. Influence of Tyre Inflation Pressure and Wheel Load on the Traction Performance of a 65 KW MFWD Tractor on a Cohesive Soil. J. Agric. Sci. 2013, 5, 197–215. [Google Scholar] [CrossRef]
- Kingwell, R.; Fuchsbichler, A. The Whole-Farm Benefits of Controlled Traffic Farming: An Australian Appraisal. Agric. Syst. 2011, 104, 513–521. [Google Scholar] [CrossRef]
- Latsch, A.; Anken, T. Soil and Crop Responses to a “Light” Version of Controlled Traffic Farming in Switzerland. Soil Tillage Res. 2019, 194, 104310. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Unit | Model |
|---|---|---|
| Tractor Model | Fiat 680 | |
| Total mass | kg | 4310 |
| Front axle | kg | 780 |
| Rear axle | kg | 3530 |
| Rear tyre | Kleber traker | 420/85R30 |
| Front tyre | Vredestein multirill | 7.50–16 |
| Front tyre inflation pressure | bar | 1.7 |
| Rear tyre inflation pressure | bar | 1.45 |
| Range of the Nose Zone (cm) | ||||
|---|---|---|---|---|
| Pass | 0 kg | 800 kg | 1500 kg | 2500 kg |
| 1 | 17.07bB | 20.17aA | 17.07cB | 16.23bB |
| 4 | 19.93aA | 19.2aA | 18.1bA | 19.1aA |
| 9 | 20.33aAB | 18.57aBC | 21.17aA | 17.5bC |
| Depth of the max cone index (cm) | ||||
| pass | 0 kg | 800 kg | 1500 kg | 2500 kg |
| 1 | 12.5bC | 12.1bC | 15.03aB | 22.17aA |
| 4 | 11.33bC | 11.3bC | 15.07aB | 19.07bA |
| 9 | 14.17aB | 14.1aB | 15.07aB | 18.03bA |
| Max cone index (MPa) | ||||
| pass | 0 kg | 800 kg | 1500 kg | 2500 kg |
| 1 | 1.15cA | 1.15cA | 1.17cA | 1.29cA |
| 4 | 1.78bA | 1.9bA | 1.81bA | 1.75bA |
| 9 | 2.17aC | 2.42aA | 2.3aB | 2.46aA |
| Average cone index (MPa) | ||||
| pass | 0 kg | 800 kg | 1500 kg | 2500 kg |
| 1 | 0.765cB | 0.839cA | 0.838bA | 0.824cA |
| 4 | 0.931bB | 1.042bA | 0.899bB | 0.92bB |
| 9 | 0.979aC | 1.124aA | 1.010bBC | 1.075aAB |
| Pass | Traction (kg) | |||
|---|---|---|---|---|
| 0 | 800 | 1500 | 2500 | |
| 1 | 0.00 | 7.95 | 15.77 | 40.11 |
| 2 | 1.29 | 6.54 | 14.42 | 30.79 |
| 3 | 1.15 | 5.86 | 14.42 | 29.78 |
| 4 | 1.52 | 5.70 | 14.64 | 29.83 |
| 5 | 1.37 | 7.05 | 14.81 | 27.75 |
| 6 | 1.40 | 6.20 | 14.81 | 29.78 |
| 7 | 1.22 | 5.92 | 14.64 | 28.99 |
| 8 | 1.89 | 5.30 | 14.42 | 28.71 |
| 9 | 1.66 | 6.37 | 14.47 | 29.50 |
| Power Used (kW) | Fuel Consumption (kg/h) | Fuel Savings (%) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Pass | 800 | 1500 | 2500 | 800 | 1500 | 2500 | 800 | 1500 | 2500 |
| 0 | 13.86 | 25.92 | 56.13 | 3.60 | 6.74 | 14.59 | 0.00 | 0.00 | 0.00 |
| 1 | 13.91 | 26.62 | 45.85 | 3.62 | 6.92 | 11.92 | −0.37 | −2.68 | 18.31 |
| 2 | 12.36 | 26.14 | 44.08 | 3.21 | 6.80 | 11.46 | 10.82 | −0.86 | 21.48 |
| 3 | 12.93 | 22.91 | 43.81 | 3.36 | 5.96 | 11.39 | 6.73 | 11.63 | 21.95 |
| 4 | 11.61 | 23.56 | 41.42 | 3.02 | 6.13 | 10.77 | 16.22 | 9.11 | 26.21 |
| 5 | 13.16 | 23.21 | 44.30 | 3.42 | 6.04 | 11.52 | 5.01 | 10.45 | 21.09 |
| 6 | 13.39 | 22.85 | 42.68 | 3.48 | 5.94 | 11.10 | 3.39 | 11.86 | 23.96 |
| 7 | 12.48 | 22.39 | 43.81 | 3.25 | 5.82 | 11.39 | 9.93 | 13.61 | 21.96 |
| 8 | 13.23 | 24.19 | 43.73 | 3.44 | 6.29 | 11.37 | 4.53 | 6.68 | 22.09 |
| 9 | 11.72 | 22.30 | 44.23 | 3.05 | 5.80 | 11.50 | 15.40 | 13.98 | 21.20 |
| Permanente lane | 10.32 | 18.34 | 32.37 | 2.68 | 4.77 | 8.42 | 25.50 | 29.23 | 42.34 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, K.; Benetti, M.; Sozzi, M.; Gasparini, F.; Sartori, L. Soil Compaction under Different Traction Resistance Conditions—A Case Study in North Italy. Agriculture 2022, 12, 1954. https://doi.org/10.3390/agriculture12111954
Liu K, Benetti M, Sozzi M, Gasparini F, Sartori L. Soil Compaction under Different Traction Resistance Conditions—A Case Study in North Italy. Agriculture. 2022; 12(11):1954. https://doi.org/10.3390/agriculture12111954
Chicago/Turabian StyleLiu, Kaihua, Marco Benetti, Marco Sozzi, Franco Gasparini, and Luigi Sartori. 2022. "Soil Compaction under Different Traction Resistance Conditions—A Case Study in North Italy" Agriculture 12, no. 11: 1954. https://doi.org/10.3390/agriculture12111954
APA StyleLiu, K., Benetti, M., Sozzi, M., Gasparini, F., & Sartori, L. (2022). Soil Compaction under Different Traction Resistance Conditions—A Case Study in North Italy. Agriculture, 12(11), 1954. https://doi.org/10.3390/agriculture12111954