


Designing an Interactively Cognitive Humanoid Field-Phenotyping Robot for In-Field Rice Tiller Counting

 ,
,  , ,
, ,
Abstract
:1. Introduction
- (1)
- An interactive cognition methodology is proposed for full growth period in-field high-throughput phenotyping.
- (2)
- To accomplish the interactive cognition-based field phenotyping, a humanoid robot is designed with human-in-the-loop interactive methodology.
- (3)
- A high-accuracy rice tiller counting method based on the phenotyping platform is proposed.
2. Interactive Cognition Phenotyping Method
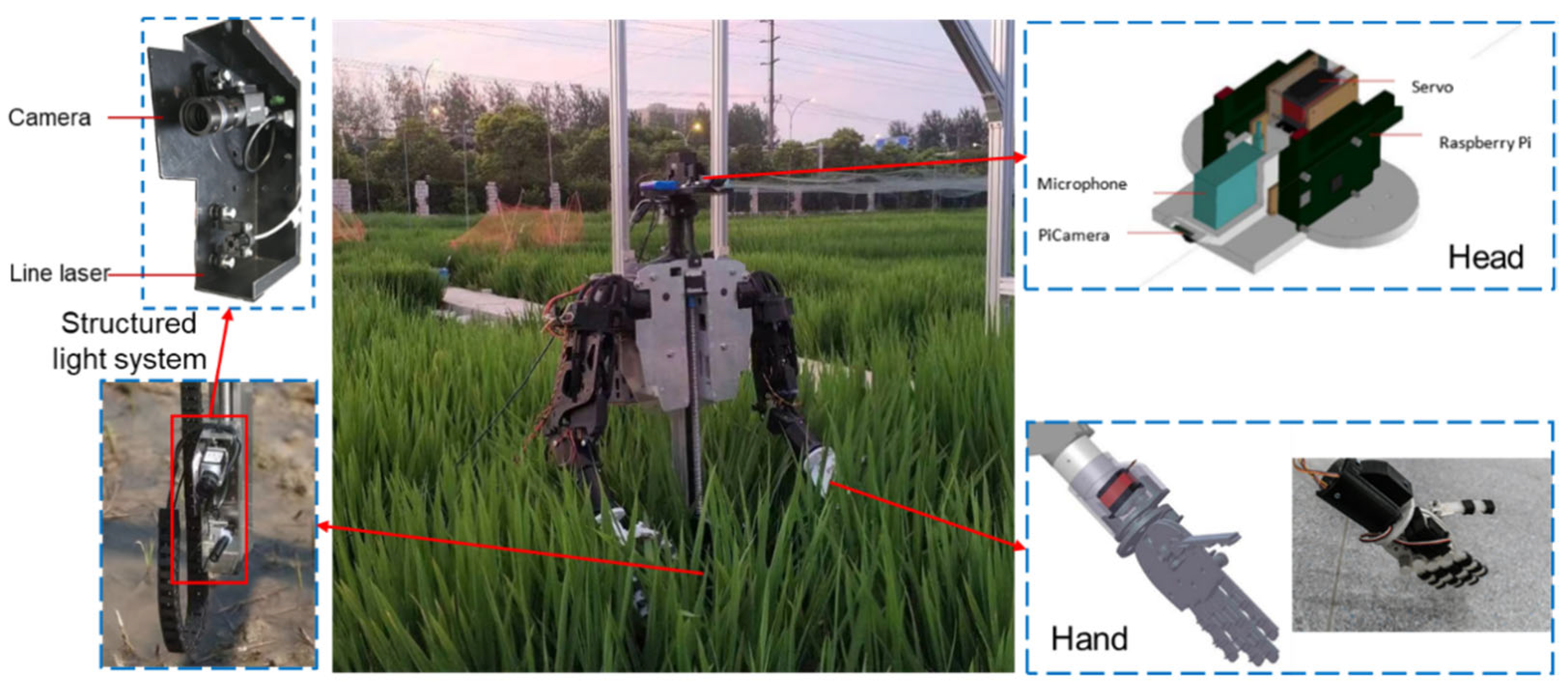
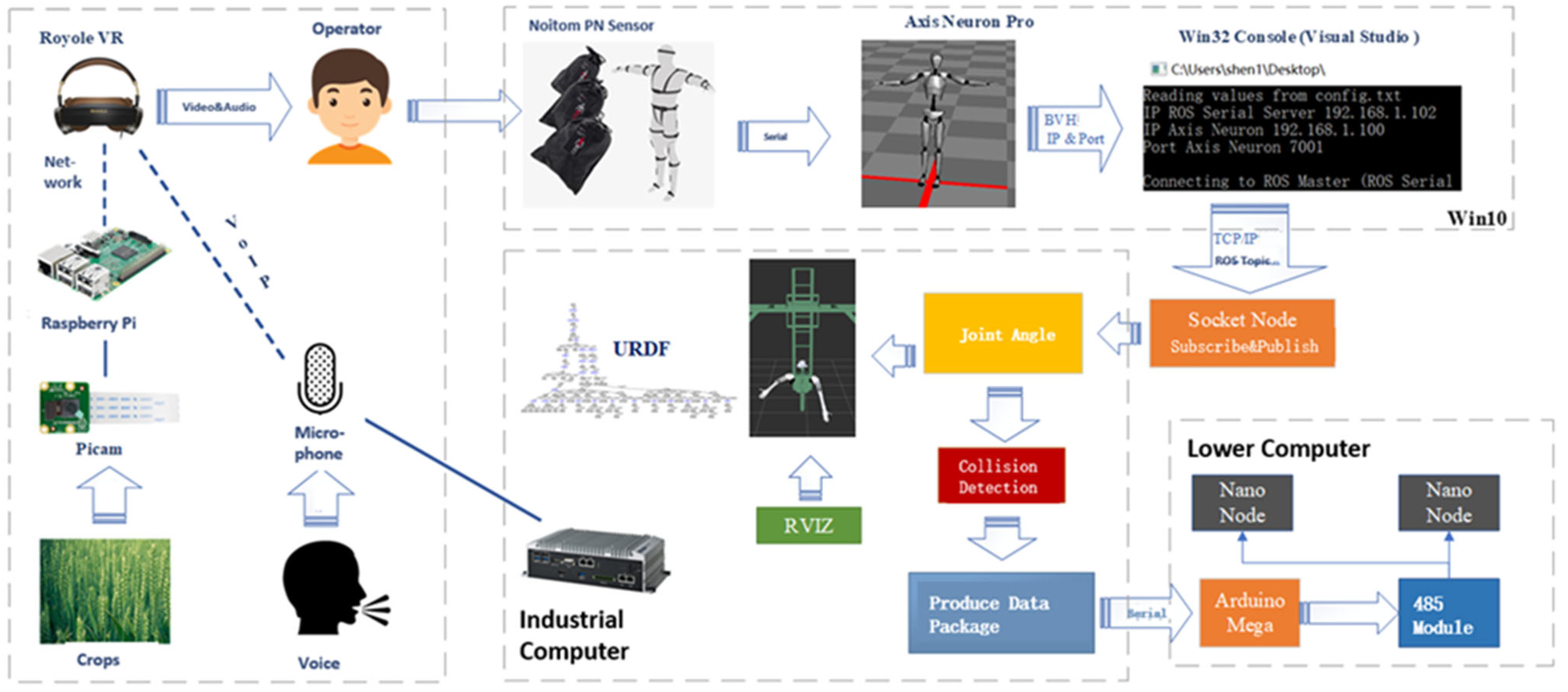
2.1. Interactively Cognitive Humanoid Field Phenotyping Robot
2.2. Interactive Cognition Phenotyping Process
3. Bio-Inspired Operational Forms
3.1. Head-Mounted Interactive System
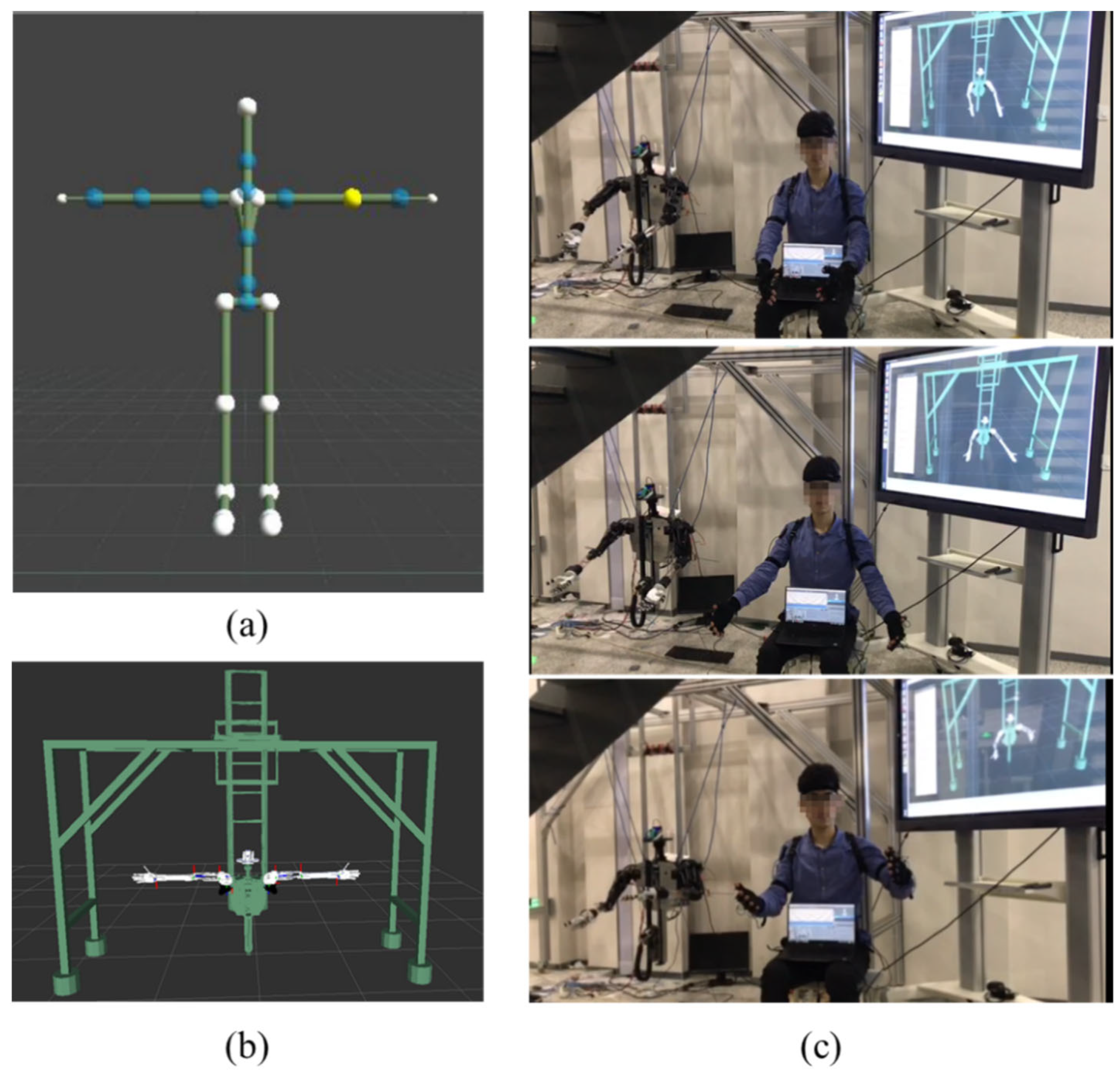
3.2. Motion Interactive System Based on Perception Neuron (PN) Sensor
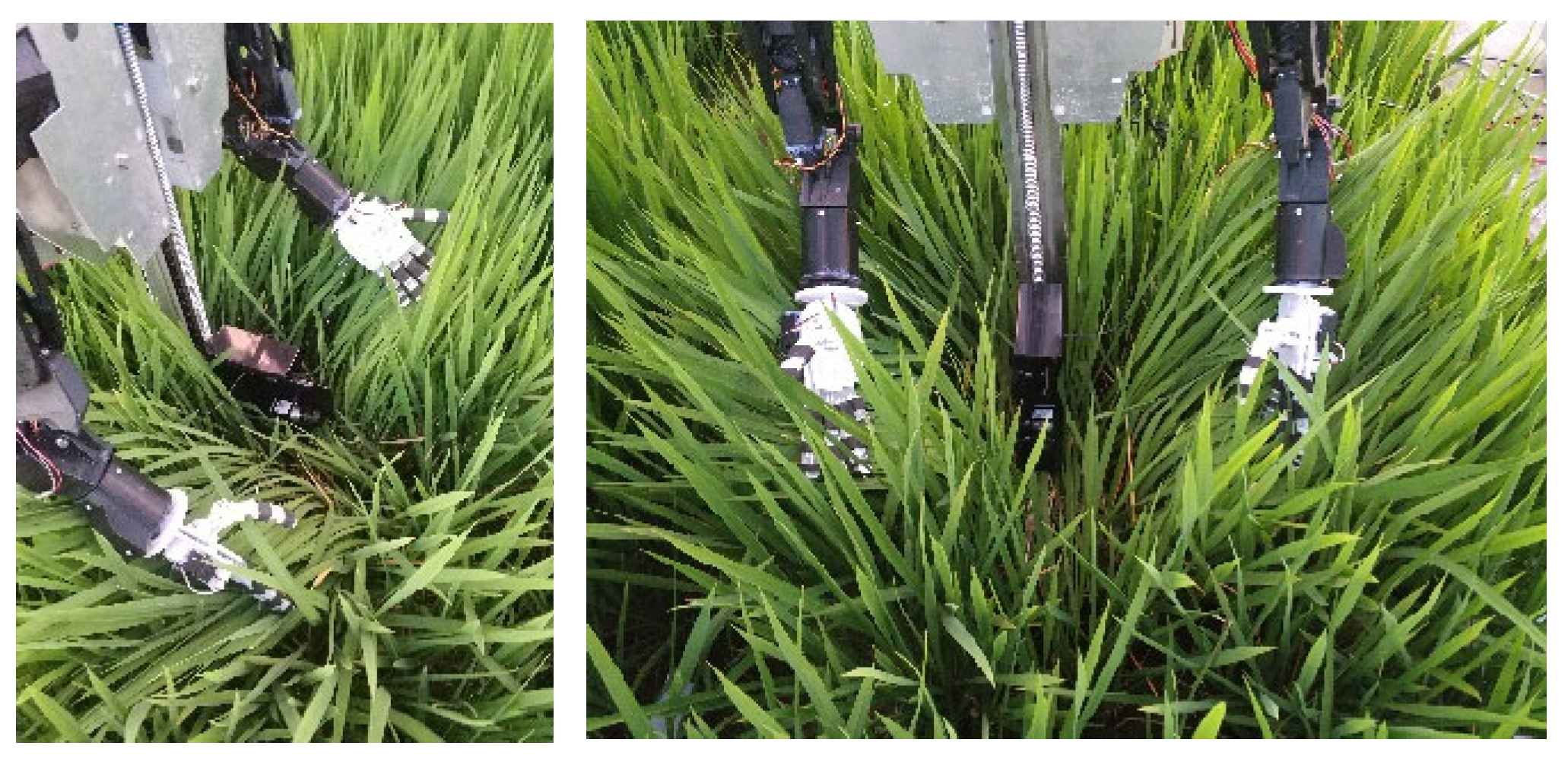
3.3. Bio-Inspired Operation
4. In-Field Rice Tiller Counting Method
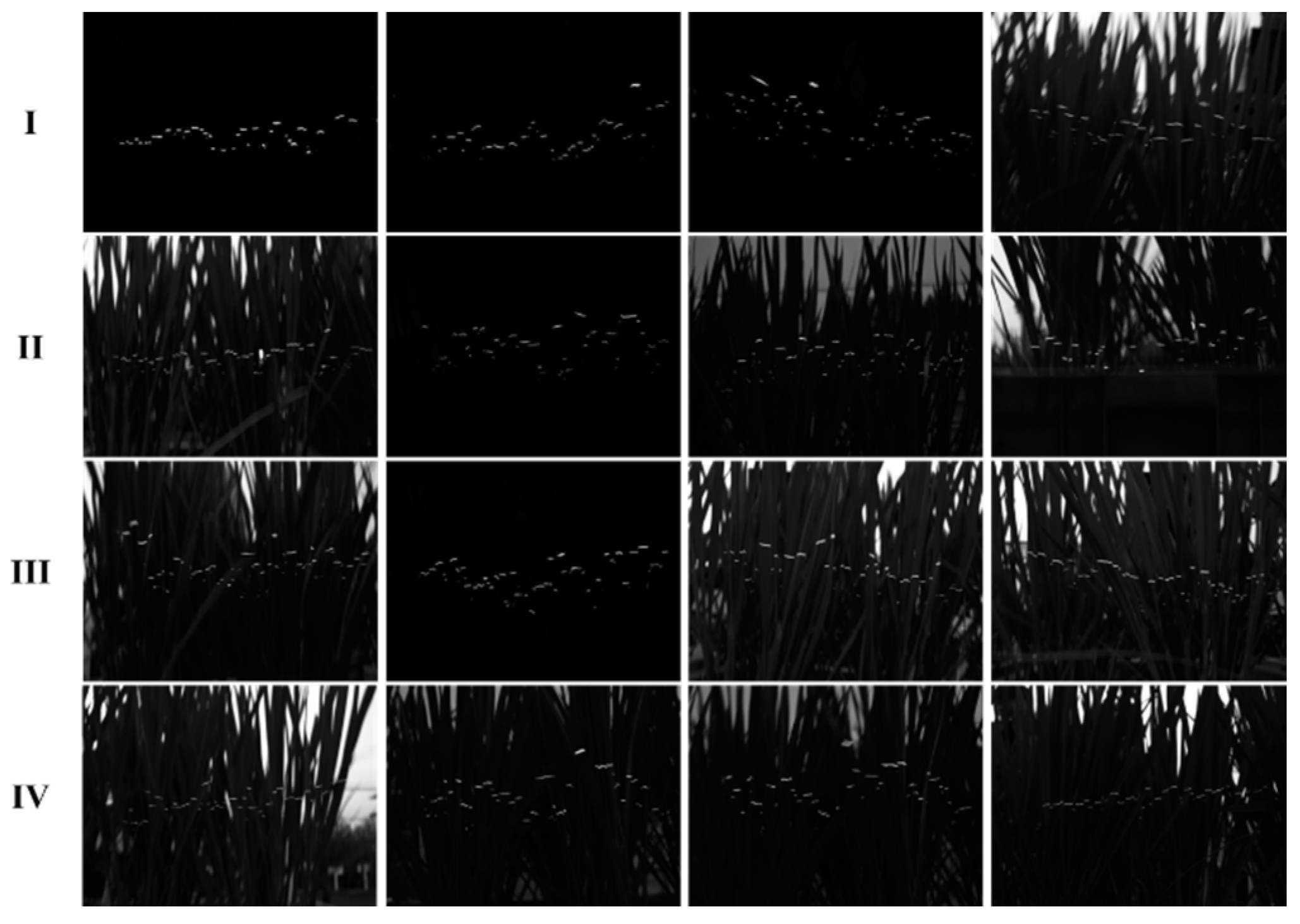
4.1. Image Acquisition
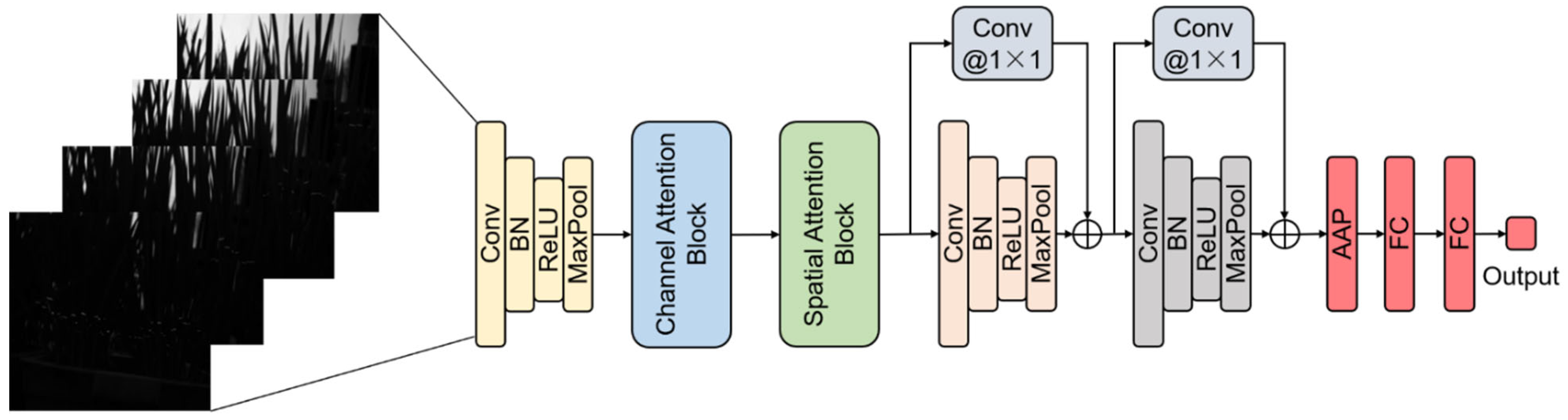
4.2. Rice Tiller Number Recognition Algorithm

5. Experiment and Results
5.1. Data Description
5.2. Experiment Setup
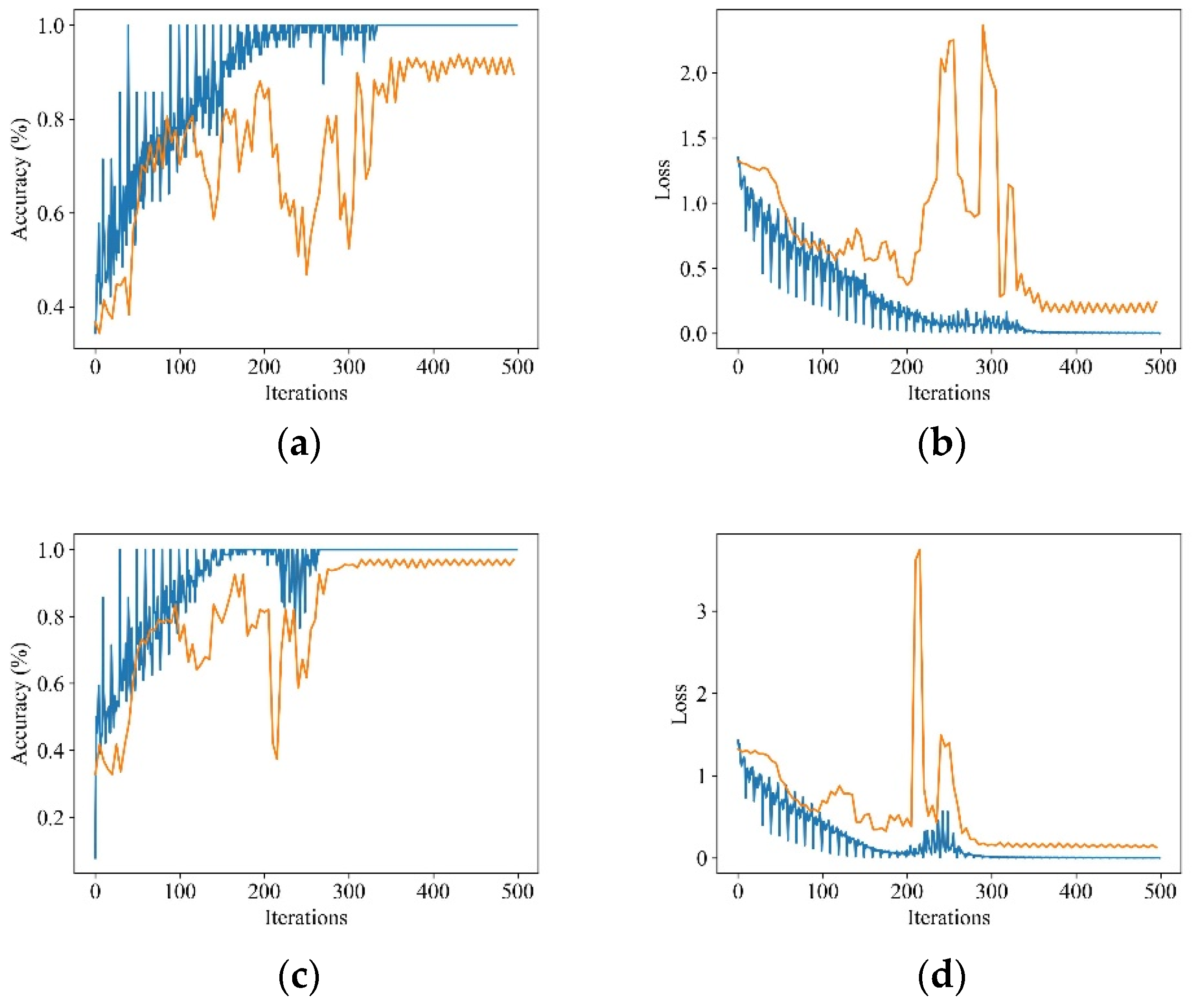
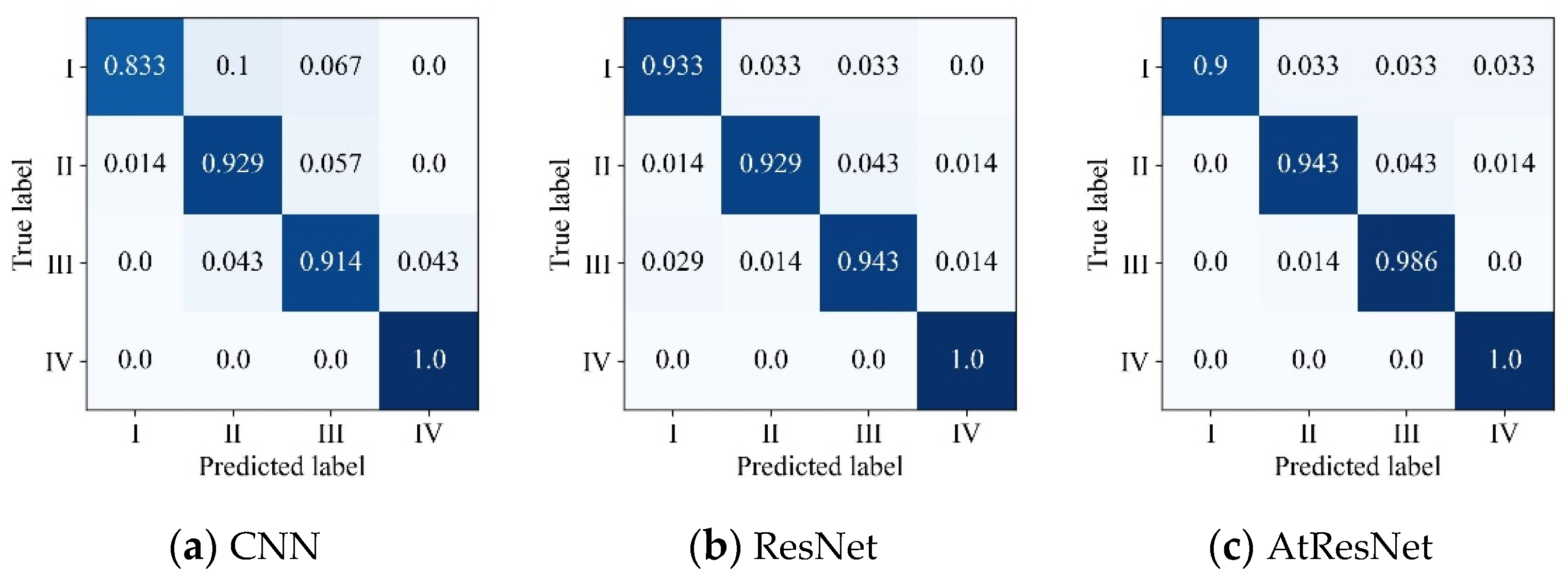
5.3. Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Godfray, H.C.J.; Beddington, J.R.; Crute, I.R.; Haddad, L.; Lawrence, D.; Muir, J.F.; Pretty, J.; Robinson, S.; Thomas, S.M.; Toulmin, C. Food Security: The Challenge of Feeding 9 Billion People. Science 2010, 327, 812–818. [Google Scholar] [CrossRef] [Green Version]
- Crossa, J.; Fritsche-Neto, R.; Montesinos-Lopez, O.A.; Costa-Neto, G.; Dreisigacker, S.; Montesinos-Lopez, A.; Bentley, A.R. The Modern Plant Breeding Triangle: Optimizing the Use of Genomics, Phenomics, and Enviromics Data. Front. Plant Sci. 2021, 12, 651480. [Google Scholar] [CrossRef]
- Hickey, L.T.; Hafeez, A.N.; Robinson, H.; Jackson, S.A.; Leal-Bertioli, S.C.M.; Tester, M.; Gao, C.; Godwin, I.D.; Hayes, B.J.; Wulff, B.B.H. Breeding crops to feed 10 billion. Nat. Biotechnol. 2019, 37, 744–754. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Gao, S.; Xiao, F.; Li, G.; Ding, Y.; Guo, Q.; Paul, M.J.; Liu, Z. Leaf to panicle ratio (LPR): A new physiological trait indicative of source and sink relation in japonica rice based on deep learning. Plant Methods 2020, 16, 1–15. [Google Scholar] [CrossRef]
- Furbank, R.T.; Tester, M. Phenomics—technologies to relieve the phenotyping bottleneck. Trends Plant Sci. 2011, 16, 635–644. [Google Scholar] [CrossRef]
- Araus, J.L.; Cairns, J.E. Field high-throughput phenotyping: The new crop breeding frontier. Trends Plant Sci. 2014, 19, 52–61. [Google Scholar] [CrossRef]
- Jin, X.; Zarco-Tejada, P.J.; Schmidhalter, U.; Reynolds, M.P.; Hawkesford, M.J.; Varshney, R.K.; Yang, T.; Nie, C.; Li, Z.; Ming, B.; et al. High-Throughput Estimation of Crop Traits: A Review of Ground and Aerial Phenotyping Platforms. IEEE Geosci. Remote Sens. Mag. 2020, 9, 200–231. [Google Scholar] [CrossRef]
- Scanalyzer 3d, Lemnatec Gmbh. Available online: http://www.lemnatec.com/products/hardware-solutions/scanalyzer-3d/ (accessed on 30 September 2022).
- Petrozza, A.; Santaniello, A.; Summerer, S.; Di Tommaso, G.; Di Tommaso, D.; Paparelli, E.; Piaggesi, A.; Perata, P.; Cellini, F. Physiological responses to Megafol® treatments in tomato plants under drought stress: A phenomic and molecular approach. Sci. Hortic. 2014, 174, 185–192. [Google Scholar] [CrossRef]
- Appf. Plant Accelerator. Available online: https://www.plant-phenomics.org.au/ (accessed on 30 September 2022).
- Hartmann, A.; Czauderna, T.; Hoffmann, R.; Stein, N.; Schreiber, F. HTPheno: An image analysis pipeline for high-throughput plant phenotyping. BMC Bioinform. 2011, 12, 148. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Martre, P.; Buis, S.; Abichou, M.; Andrieu, B.; Baret, F. Estimation of Plant and Canopy Architectural Traits Using the Digital Plant Phenotyping Platform. Plant Physiol. 2019, 181, 881–890. [Google Scholar] [CrossRef]
- Scanalyzer Field, Lemnatec Gmbh. Available online: http://www.lemnatec.com/products/hardwaresolutions/scanalyzer-field/ (accessed on 30 September 2022).
- Andrade-Sanchez, P.; Gore, M.A.; Heun, J.T.; Thorp, K.R.; Carmo-Silva, A.E.; French, A.N.; Salvucci, M.E.; White, J.W. Development and evaluation of a field-based high-throughput phenotyping platform. Funct. Plant Biol. 2014, 41, 68–79. [Google Scholar] [CrossRef] [Green Version]
- Mueller-Sim, T.; Jenkins, M.; Abel, J.; Kantor, G. The Robotanist: A ground-based agricultural robot for high-throughput crop phenotyping. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3634–3639. [Google Scholar] [CrossRef]
- Bao, Y.; Nakami, A.D.; Tang, L. Development of a Field Robotic Phenotyping System for Sorghum Biomass Yield Component Traits Characterization. In Proceedings of the ASABE and CSBE/SCGAB Annual International Meeting, Montreal, QC, Canada, 13–16 July 2014; Available online: https://elibrary.asabe.org/abstract.asp?aid=44616&t=5 (accessed on 30 September 2022).
- Zhou, C.; Ye, H.; Hu, J.; Shi, X.; Hua, S.; Yue, J.; Xu, Z.; Yang, G. Automated Counting of Rice Panicle by Applying Deep Learning Model to Images from Unmanned Aerial Vehicle Platform. Sensors 2019, 19, 3106. [Google Scholar] [CrossRef] [Green Version]
- Xing, Y.; Zhang, Q. Genetic and Molecular Bases of Rice Yield. Annu. Rev. Plant Biol. 2010, 61, 421–442. [Google Scholar] [CrossRef]
- Chen, J.; Gao, H.; Zheng, X.-M.; Jin, M.; Weng, J.-F.; Ma, J.; Ren, Y.; Zhou, K.; Wang, Q.; Wang, J.; et al. An evolutionarily conserved gene, FUWA, plays a role in determining panicle architecture, grain shape and grain weight in rice. Plant J. 2015, 83, 427–438. [Google Scholar] [CrossRef] [Green Version]
- Yang, W.; Xu, X.; Duan, L.; Luo, Q.; Chen, S.; Zeng, S.; Liu, Q. High-throughput measurement of rice tillers using a conveyor equipped with x-ray computed tomography. Rev. Sci. Instrum. 2011, 82, 025102. [Google Scholar] [CrossRef] [Green Version]
- Zhifeng, H.; Liang, G.; Chengliang, L.; Yixiang, H.; Qingliang, N. Measurement of Rice Tillers Based on Magnetic Resonance Imaging. IFAC-Pap. 2016, 49, 254–258. [Google Scholar] [CrossRef]
- Scotford, I.; Miller, P. Estimating Tiller Density and Leaf Area Index of Winter Wheat using Spectral Reflectance and Ultrasonic Sensing Techniques. Biosyst. Eng. 2004, 89, 395–408. [Google Scholar] [CrossRef]
- Deng, R.; Jiang, Y.; Tao, M.; Huang, X.; Bangura, K.; Liu, C.; Lin, J.; Qi, L. Deep learning-based automatic detection of productive tillers in rice. Comput. Electron. Agric. 2020, 177, 105703. [Google Scholar] [CrossRef]
- Yamagishi, Y.; Kato, Y.; Ninomiya, S.; Guo, W. Image-Based Phenotyping for Non-Destructive in Situ Rice (Oryza Sativa L.) Tiller Counting Using Proximal Sensing. Sensors 2022, 22, 5547. [Google Scholar] [CrossRef]
- Chen, Y.; Xiong, Y.; Zhang, B.; Zhou, J.; Zhang, Q. 3D point cloud semantic segmentation toward large-scale unstructured agricultural scene classification. Comput. Electron. Agric. 2021, 190, 106445. [Google Scholar] [CrossRef]
- Langevin, G. Inmoov—Open Source 3d Printed Life Size Robot. Available online: http://inmoov.fr (accessed on 30 September 2022).
- Kontoudis, G.P. Openbionics—Open-Source Robotic & Bionic Hands. Available online: http://www.openbionics.org (accessed on 30 September 2022).
- Perception Neuron System. Available online: https://noitom.com/perception-neuron-series (accessed on 30 September 2022).
- Ferenc, G.; Dimic, Z.; Lutovac, M.; Vidakovic, J.; Kvrgic, V. Open Architecture Platforms for the Control of Robotic Systems and a Proposed Reference Architecture Model. Trans. Famena 2013, 37, 89–100. [Google Scholar]
- Gong, L.; Li, X.; Xu, W.; Chen, B.; Zhao, Z.; Huang, Y.; Liu, C. Naturally teaching a humanoid Tri-Co robot in a real-time scenario using first person view. Sci. China Inf. Sci. 2019, 62, 50205. [Google Scholar] [CrossRef] [Green Version]
- Gong, L.; Chen, B.; Xu, W.; Liu, C.; Li, X.; Zhao, Z.; Zhao, L. Motion Similarity Evaluation between Human and a Tri-Co Robot during Real-Time Imitation with a Trajectory Dynamic Time Warping Model. Sensors 2022, 22, 1968. [Google Scholar] [CrossRef]
- Ren, M.; Huang, M.; Qiu, H.; Chun, Y.; Li, L.; Kumar, A.; Fang, J.; Zhao, J.; He, H.; Li, X. Genome-Wide Association Study of the Genetic Basis of Effective Tiller Number in Rice. Rice 2021, 14, 1–13. [Google Scholar] [CrossRef]
- He, K.M.; Zhang, X.Y.; Ren, S.Q.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift. In Proceedings of the International Conference on Machine Learning, Lille, France, 6–11 July 2015; Volume 37, pp. 448–456. [Google Scholar]
- Mnih, V.; Heess, N.; Graves, A.; Kavukcuoglu, K. Recurrent Models of Visual Attention. In Proceedings of the 27th International Conference on Neural Information Processing Systems, Montreal, QC, Canada, 8–13 December 2014. [Google Scholar]
- Woo, S.H.; Park, J.; Lee, J.Y.; Kweon, I.S. CBAM: Convolutional Block Attention Module. In Computer Vision—ECCV 2018; PT VII; Springer: Berlin/Heidelberg, Germany, 2018; Volume 11211, pp. 3–19. [Google Scholar]
- Yan, Y.; Wei, M.; Li, Y.; Tao, H.; Wu, H.; Chen, Z.; Li, C.; Xu, J.-H. MiR529a controls plant height, tiller number, panicle architecture and grain size by regulating SPL target genes in rice (Oryza sativa L.). Plant Sci. 2020, 302, 110728. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grade | Tiller Number | Image Number |
|---|---|---|
| I | <21 | 120 |
| II | 21~22 | 278 |
| III | 23~25 | 280 |
| IV | >25 | 100 |
| Layer | Parameter | Output Size |
|---|---|---|
| Conv1 | Kernel size: Stride: Padding: 2 Kernel number: 16 | |
| Pool1 | Kernel size: | |
| Conv2 | Kernel size: 3 Stride: Padding: 1 Kernel number: 32 | |
| Pool2 | Kernel size: | |
| Conv3 | Kernel size: Stride: Padding: 1 Kernel number: 64 | |
| Pool3 | Kernel size: | |
| Channel Attention | r: 16 | - |
| Spatial Attention | Kernel size: Stride: Padding: 3 Kernel number: 1 | - |
| AAP | Output size: | |
| FC1 | Unit number: 128 | |
| FC2 | Unit number: 4 |
| Method | Mean | Standard Deviation |
|---|---|---|
| CNN | 93.49 | 1.64 |
| ResNet | 94.21 | 2.06 |
| AtResNet | 94.72 | 1.70 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Y.; Xia, P.; Gong, L.; Chen, B.; Li, Y.; Liu, C. Designing an Interactively Cognitive Humanoid Field-Phenotyping Robot for In-Field Rice Tiller Counting. Agriculture 2022, 12, 1966. https://doi.org/10.3390/agriculture12111966
Huang Y, Xia P, Gong L, Chen B, Li Y, Liu C. Designing an Interactively Cognitive Humanoid Field-Phenotyping Robot for In-Field Rice Tiller Counting. Agriculture. 2022; 12(11):1966. https://doi.org/10.3390/agriculture12111966
Chicago/Turabian StyleHuang, Yixiang, Pengcheng Xia, Liang Gong, Binhao Chen, Yanming Li, and Chengliang Liu. 2022. "Designing an Interactively Cognitive Humanoid Field-Phenotyping Robot for In-Field Rice Tiller Counting" Agriculture 12, no. 11: 1966. https://doi.org/10.3390/agriculture12111966
APA StyleHuang, Y., Xia, P., Gong, L., Chen, B., Li, Y., & Liu, C. (2022). Designing an Interactively Cognitive Humanoid Field-Phenotyping Robot for In-Field Rice Tiller Counting. Agriculture, 12(11), 1966. https://doi.org/10.3390/agriculture12111966