
Recommending Advanced Deep Learning Models for Efficient Insect Pest Detection


Abstract
:1. Introduction
2. Materials and Methods
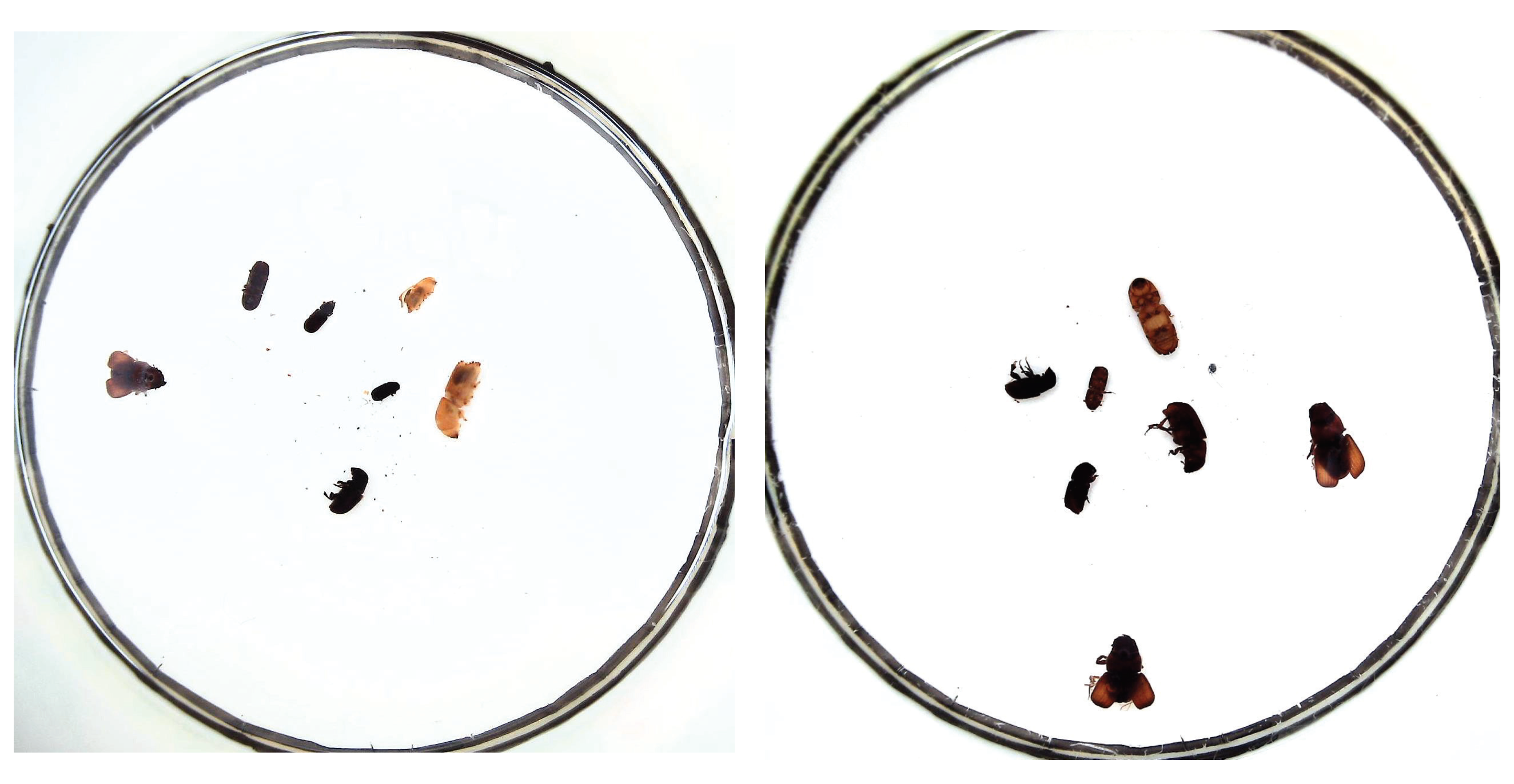
2.1. Collection of Insect Pests
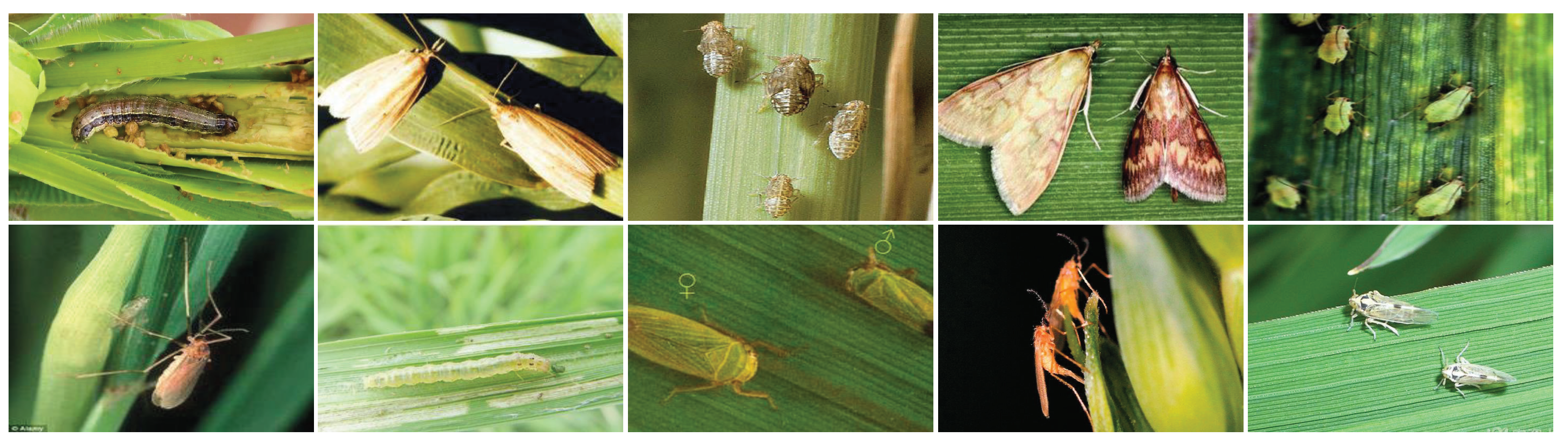
2.2. Datasets
2.2.1. Insect Pest Detection
2.2.2. Insect Pest Samples Acquisition
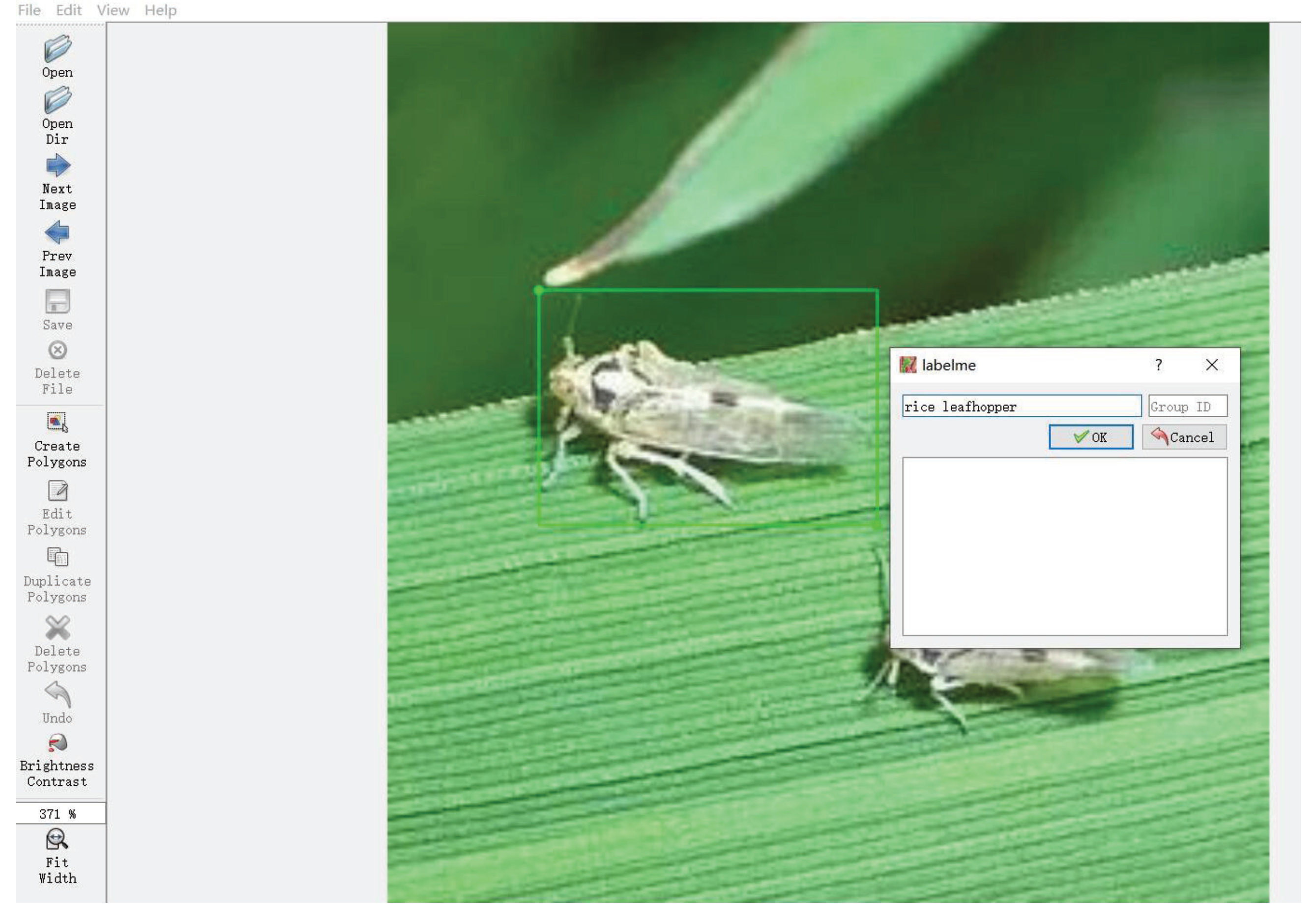
2.2.3. Data Labeling
2.3. Model Evaluation
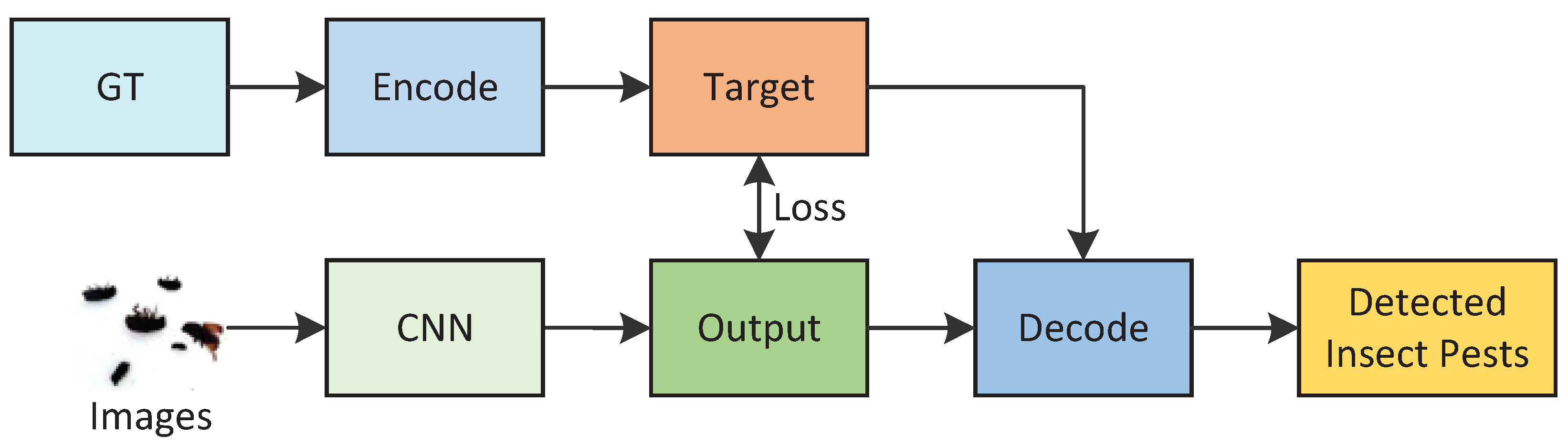
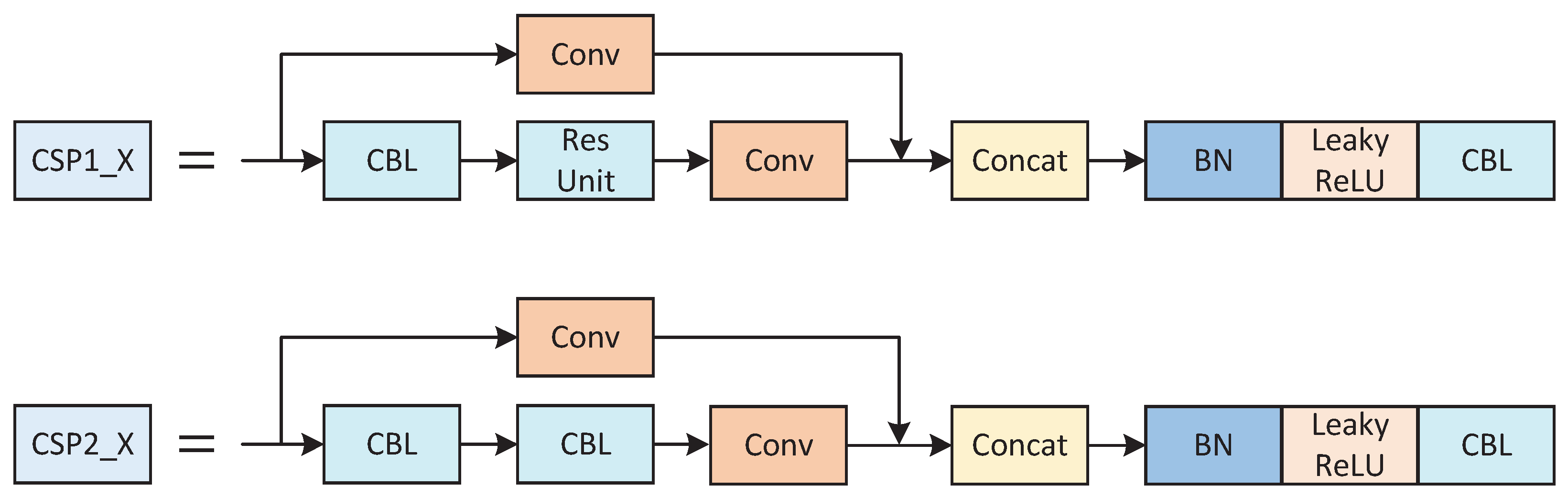
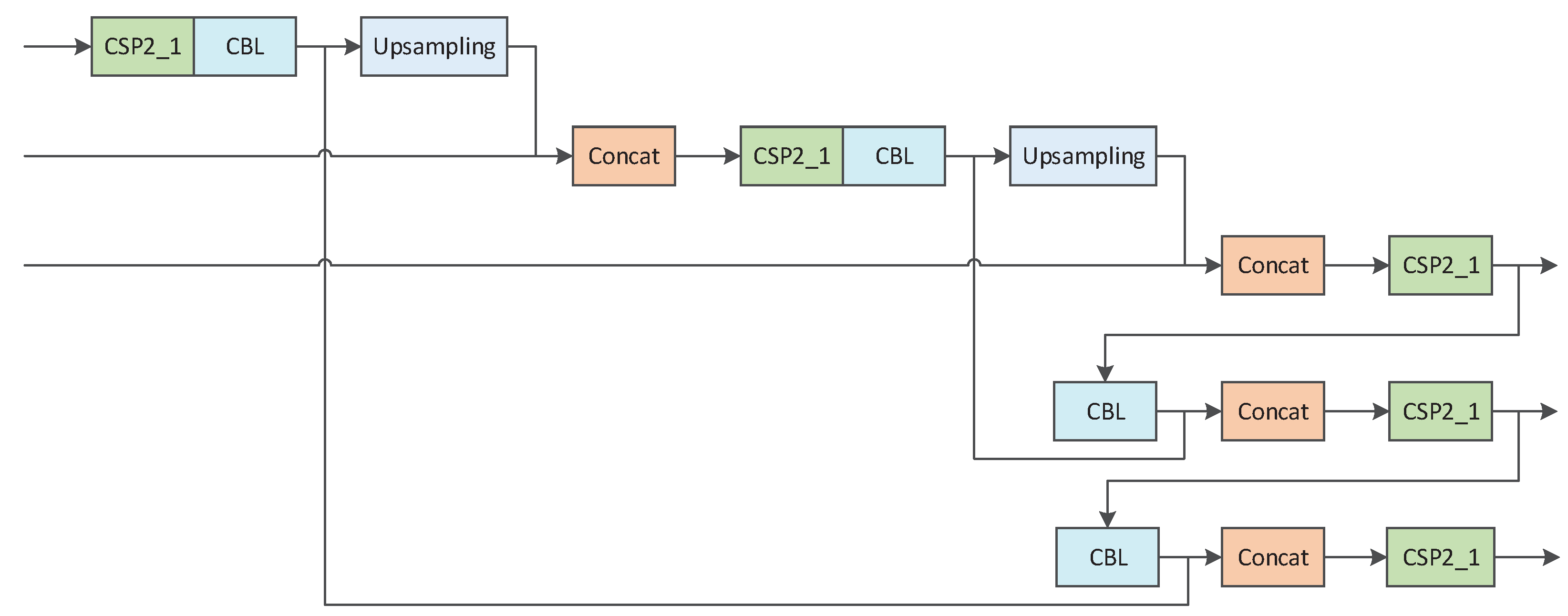
2.3.1. Model 1: Yolov5 Darknet53
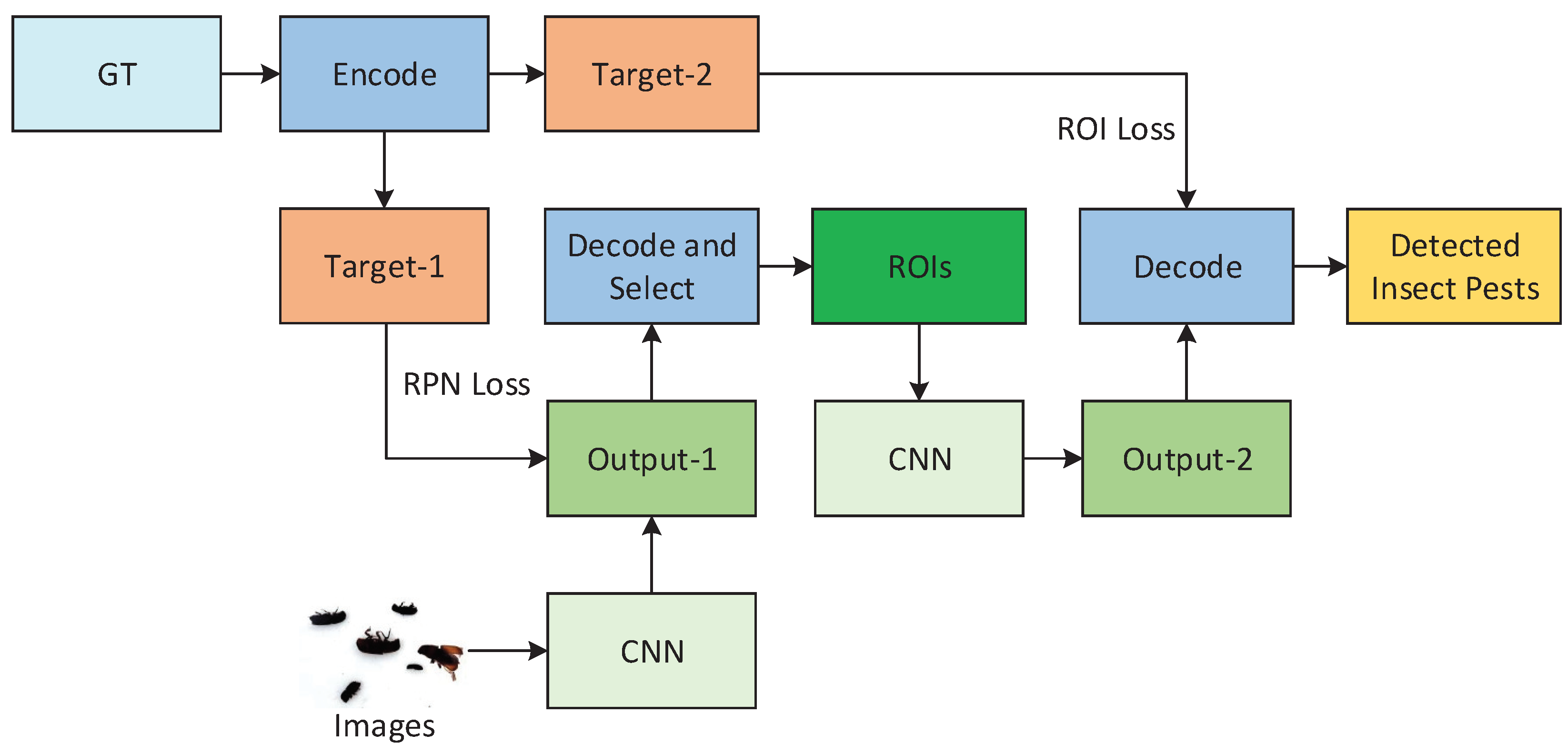
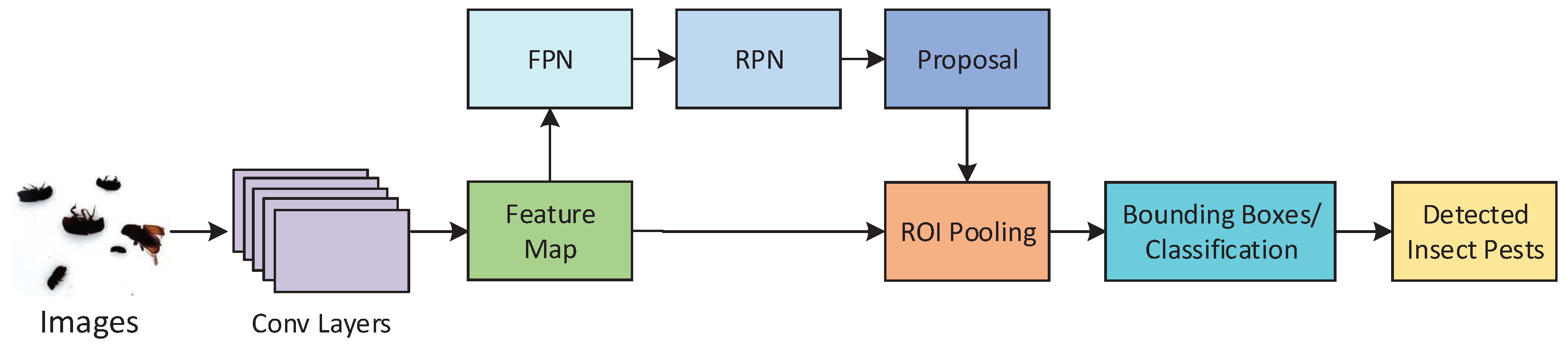
2.3.2. Model 2: Faster-RCNN ResNet50
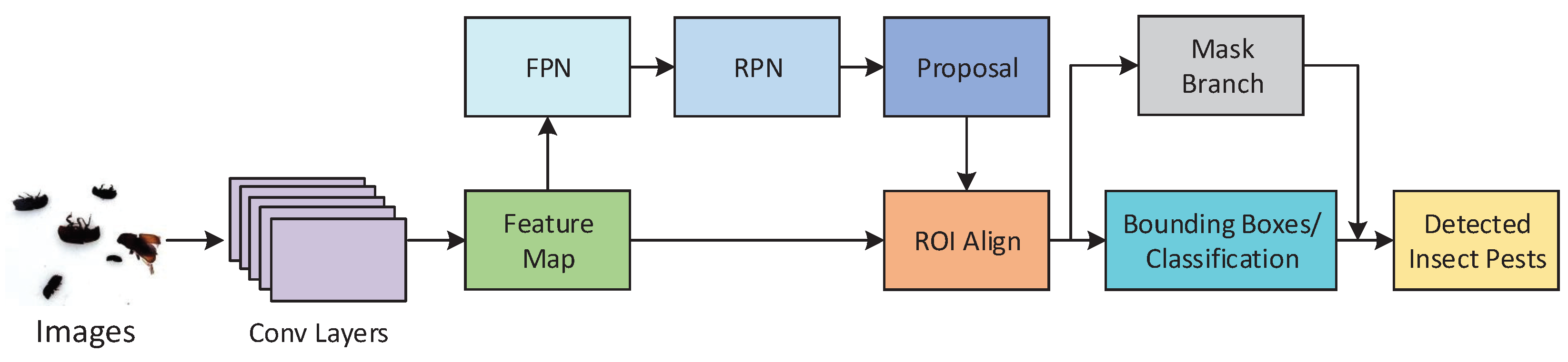
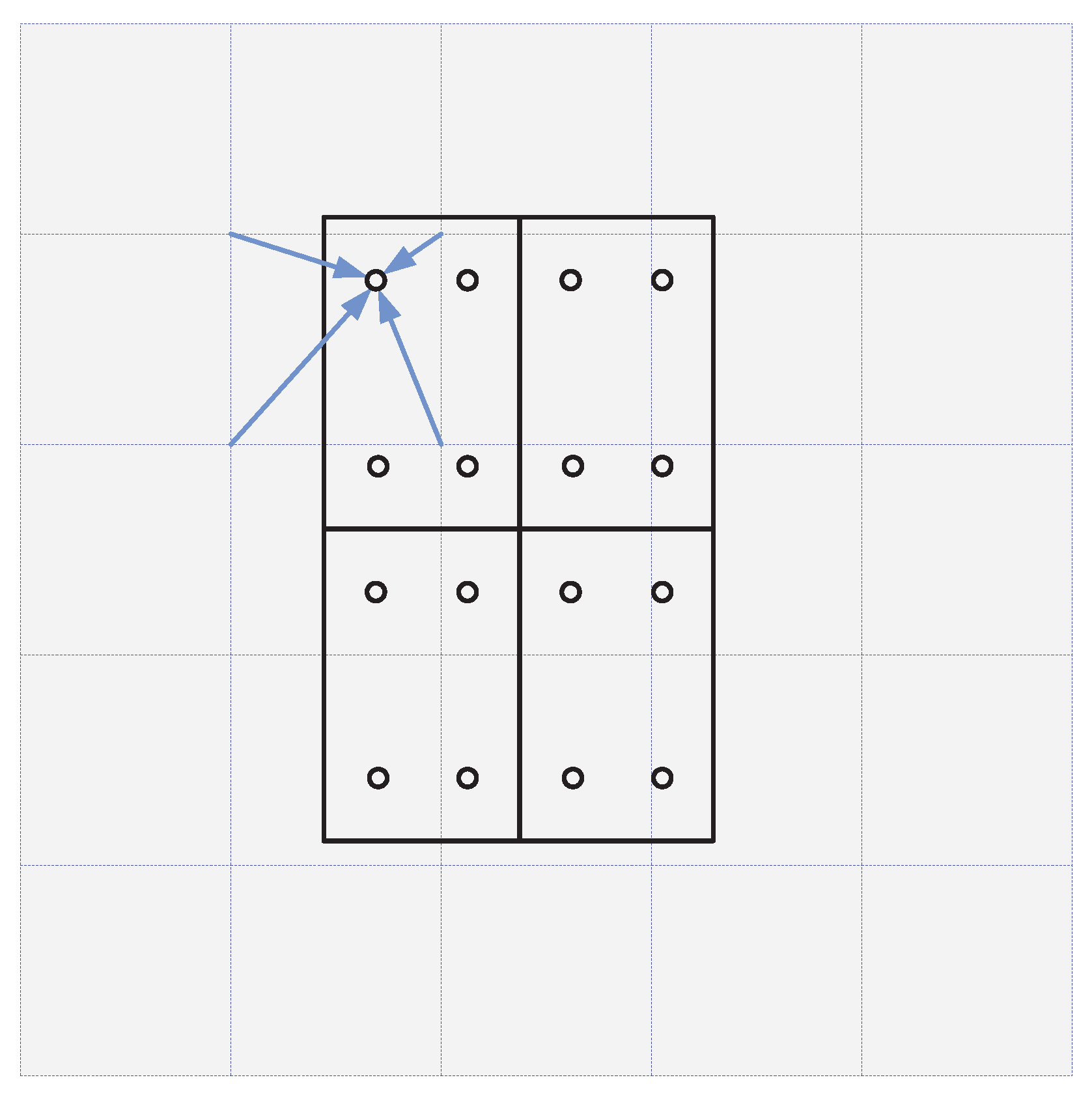
2.3.3. Model 3: Mask-RCNN ResNet50
3. Results and Discussion
3.1. Experimental Setting
3.2. Performance Metrics
3.3. Implementation Details
3.4. Model Evaluation Based on Baidu AI Insect Detection Dataset
3.5. Model Evaluation Based on IP102 Dataset
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Amiri, A.N.; Allahbakhsh. An Effective Pest Management Approach in Potato to Combat Insect Pests and Herbicide. 3 Biotech 2019, 9, 16. [Google Scholar] [CrossRef] [PubMed]
- Fernández, R.; Petek, M.; Gerasymenko, I.; Juterek, M.; Patron, N.J. Insect Pest Management in The Age of Synthetic Biology. Plant Biotechnol. J. 2021, 20, 25–36. [Google Scholar] [CrossRef] [PubMed]
- Nomura, Y.; Shigemura, K. Development of Real-Time Screening System for Structural Surface Damage Using Object Detection and Generative Model Based on Deep Learning. J. Soc. Mater. Sci. Jpn. 2019, 68, 250–257. [Google Scholar] [CrossRef] [Green Version]
- Sütő, J. Embedded System-Based Sticky Paper Trap with Deep Learning-Based Insect-Counting Algorithm. Electronics 2021, 10, 1754. [Google Scholar] [CrossRef]
- Lima, M.C.F.; Leandro, M.E.D.D.A.; Valero, C.; Coronel, L.C.P.; Bazzo, C.O.G. Automatic Detection and Monitoring of Insect Pests—A Review. Agriculture 2020, 10, 161. [Google Scholar] [CrossRef]
- Dca, A.; Jg, B.; Hp, C.; Ad, A. Methods of Insect Image Capture and Classification: A Systematic Literature Review. Smart Agric. Technol. 2021, 1, 100023. [Google Scholar]
- Wu, L.; Liu, Z.; Bera, T.; Ding, H.; Xu, J. A Deep Learning Model to Recognize Food Contaminating Beetle Species Based on Elytra Fragments. Comput. Electron. Agric. 2019, 166, 105002. [Google Scholar] [CrossRef]
- Patel, P.P.; Vaghela, D.B. Crop Diseases and Pests Detection Using Convolutional Neural Network. In Proceedings of the 2019 IEEE International Conference on Electrical, Computer and Communication Technologies, Coimbatore, India, 20–22 February 2019; pp. 1–4. [Google Scholar]
- Ngugi, L.C.; Abelwahab, M.; Abo-Zahhad, M. Recent Advances in Image Processing Techniques for Automated Leaf Pest and Disease Recognition–A Review. Inf. Process. Agric. 2021, 8, 27–51. [Google Scholar] [CrossRef]
- Gayathri, A.G.; Remya Ajai, A.S. VLSI Implementation of Improved Sobel Edge Detection Algorithm. In Proceedings of the 2021 International Conference on Communication, Control and Information Sciences, Idukki, India, 16–18 June 2021; pp. 1–6. [Google Scholar]
- Lu, F.; Xie, F.; Shen, S.; Yang, J.; Huang, L. The One-Stage Detector Algorithm Based on Background Prediction and Group Normalization for Vehicle Detection. Appl. Sci. 2020, 10, 5883. [Google Scholar] [CrossRef]
- Fan, C.; Wang, Q. Research on Image Segmentation Method Using A Structure-preserving Region Model-based MRF. Clust. Comput. 2019, 22, 15329–15334. [Google Scholar] [CrossRef]
- Pan, R.; Zhang, Z.; Fan, Y.; Cao, J.; Lu, K.; Yang, T. Multi-objective Optimization Method for Learning Thresholds in A Decision-theoretic Rough Set Model. Int. J. Approx. Reason. 2016, 71, 34–49. [Google Scholar] [CrossRef]
- Zelazo, D.; Mesbahi, M.; Belabbas, M.A. Graph Theory in Systems and Controls. In Proceedings of the 2018 IEEE Conference on Decision and Control, Miami, FL, USA, 17–19 December 2018; pp. 6168–6179. [Google Scholar]
- Junyan, B. Research on The Technology of Artificial Intelligence in Computer Network under The Background of Big Data. In Proceedings of the 2020 International Conference on Computer Communication and Network Security, Xi’an, China, 21–23 August 2020; pp. 51–54. [Google Scholar]
- Arshad, T.; Jia, M.; Guo, Q.; Gu, X.; Liu, X. Fruit Classification Through Deep Learning: A Convolutional Neural Network Approach. In International Conference in Communications, Signal Processing, and Systems; Liang, Q., Wang, W., Liu, X., Na, Z., Jia, M., Zhang, B., Eds.; Springer: Singapore, 2020; pp. 2671–2677. [Google Scholar]
- Li, W.; Wang, D.; Li, M.; Gao, Y.; Wu, J.; Yang, X. Field Detection of Tiny Pests from Sticky Trap Images Using Deep Learning in Agricultural Greenhouse. Comput. Electron. Agric. 2021, 183, 106048. [Google Scholar] [CrossRef]
- Asefpour Vakilian, K.; Massah, J. Performance Evaluation of A Machine Vision System for Insect Pests Identification of Field Crops Using Artificial Neural Networks. Arch. Fr. Pflanzenschutz 2013, 46, 1262–1269. [Google Scholar] [CrossRef]
- Wu, M.; Lu, Z.; Chen, Q.; Zhu, T.; Lu, E.; Lu, W.; Liu, M. A Two-Stage Algorithm of Locational Marginal Price Calculation Subject to Carbon Emission Allowance. Energies 2020, 13, 2510. [Google Scholar] [CrossRef]
- Hu, J.; Fang, J.; Du, Y.; Liu, Z.; Ji, P. A Security Risk Plan Search Assistant Decision Algorithm Using Deep Neural Network Combined with Two-stage Similarity Calculation. Pers. Ubiquitous Comput. 2019, 23, 541–552. [Google Scholar] [CrossRef] [Green Version]
- Gao, M.; Bai, Y.; Li, Z.; Li, S.; Zhang, B.; Chang, Q. Real-time Jellyfish Classification and Detection Based on Improved Yolov3 Algorithm. Sensors 2021, 21, 8160. [Google Scholar] [CrossRef]
- Tc, A.; Ning, W.; Rw, A.; Hong, Z.A.; Gz, C. One-stage CNN Detector-based Benthonic Organisms Detection with Limited Training Dataset. Neural Netw. 2021, 144, 247–259. [Google Scholar]
- Srivastava, S.; Divekar, A.V.; Anilkumar, C.; Naik, I.; Pattabiraman, V. Comparative Analysis of Deep Learning Image Detection Algorithms. J. Big Data 2021, 8, 66. [Google Scholar] [CrossRef]
- Li, M.; Wang, H.; Yang, L.; Liang, Y.; Wan, H. Fast Hybrid Dimensionality Reduction Method for Classification Based on Feature Selection and Grouped Feature Extraction. Expert Syst. Appl. 2020, 150, 113277. [Google Scholar] [CrossRef]
- Shanmuganathan, V.; Yesudhas, H.R.; Khan, M.S.; Khari, M.; Gandomi, A.H. R-CNN and Wavelet Feature Extraction for Hand Gesture Recognition with EMG Signals. Neural Comput. Appl. 2020, 32, 16723–16736. [Google Scholar] [CrossRef]
- BaiDu Company, N.F.U. Baidu AI Insect Detection Dataset. Available online: https://aistudio.baidu.com/aistudio/datasetdetail/19638/ (accessed on 14 January 2020).
- Wu, X.; Zhan, C.; Lai, Y.K.; Cheng, M.M.; Yang, J. IP102: A Large-scale Benchmark Dataset for Insect Pest Recognition. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 8779–8788. [Google Scholar]
- Liu, B.; Zhao, W.; Sun, Q. Study of Object Detection Based on Faster-RCNN. In Proceedings of the 2017 Chinese Automation Congress, Jinan, China, 20–22 October 2017; pp. 6233–6236. [Google Scholar]
- Du, Y. A Crop Image Segmentation and Extraction Algorithm Based on Mask RCNN. Entropy 2021, 23, 1160. [Google Scholar]
- Popescu, D.E. An Integrated Approach for Monitoring Social Distancing and Face Mask Detection Using Stacked ResNet-50 and Yolov5. Electronics 2021, 10, 2996. [Google Scholar]
- Javed, H.; Iqbal, J.; Khan, T.M. Studies on Population Dynamics of Insect Pest of Safflower, Carthamus tinctorius L. Pak. J. Zool. 2013, 45, 213–217. [Google Scholar]
- Jin, S.; Sun, L. Application of Enhanced Feature Fusion Applied to YOLOv5 for Ship Detection. In Proceedings of the Chinese Control and Decision Conference, Kunming, China, 22–24 May 2021; pp. 7242–7246. [Google Scholar]
- Ding, W.; Taylor, G. Automatic Moth Detection from Trap Images for Pest Management. Comput. Electron. Agric. 2016, 123, 17–28. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Chen, Y.; Gao, M.; Dong, Z. Improved YOLOv5 network for real-time multi-scale traffic sign detection. arXiv 2021, arXiv:2112.08782v2. [Google Scholar]
- Sung, J.Y.; Yu, S.B.; Korea, S.h.P. Real-time Automatic License Plate Recognition System using YOLOv4. In Proceedings of the IEEE International Conference on Consumer Electronics–Asia, Seoul, Korea, 1–3 November 2020; pp. 1–3. [Google Scholar]
- Luo, J.; Fang, H.; Shao, F.; Zhong, Y.; Hua, X. Multi-scale Traffic Vehicle Detection Based on Faster-RCNN with NAS Optimization and Feature Enrichment. Def. Technol. 2021, 17, 1542–1554. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Mansoor, A.; Porras, A.R.; Linguraru, M.G. Region Proposal Networks with Contextual Selective Attention for Real-time Organ Detection. In Proceedings of the 2019 IEEE 16th International Symposium on Biomedical Imaging, Venice, Italy, 8–11 April 2019; pp. 1193–1196. [Google Scholar]
- Wang, K.; Liu, M.Z. Object Recognition at Night Scene Based on DCGAN and Faster-RCNN. IEEE Access 2020, 8, 193168–193182. [Google Scholar] [CrossRef]
- Su, H.; Wei, S.; Yan, M.; Wang, C.; Shi, J.; Zhang, X. Object Detection and Instance Segmentation in Remote Sensing Imagery Based on Precise Mask-RCNN. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 1454–1457. [Google Scholar]
- Chu, P.; Li, Z.; Lammers, K.; Lu, R.; Liu, X. Deep Learning-based Apple Detection Using A Suppression Mask-RCNN. Pattern Recognit. Lett. 2021, 147, 206–211. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. In Proceedings of the International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Iandola, F.N.; Han, S.; Moskewicz, M.W.; Ashraf, K.; Dally, W.J.; Keutzer, K. SqueezeNet: AlexNet-level Accuracy with 50x Fewer Parameters and <0.5 MB Model Size. arXiv 2016, arXiv:1602.07360. [Google Scholar]
- Ning, C.; Zhou, H.; Song, Y.; Tang, J. Inception Single Shot MultiBox Detector for Object Detection. In Proceedings of the 2017 IEEE International Conference on Multimedia & Expo Workshops, Hong Kong, China, 10–14 July 2017; pp. 549–554. [Google Scholar]
- Li, Y.; Qian, M.; Liu, P.; Cai, Q.; Li, X.; Guo, J.; Yan, H.; Yu, F.; Yuan, K.; Yu, J.; et al. The Recognition of Rice Images by UAV Based on Capsule Network. Clust. Comput. 2018, 22, 9515–9524. [Google Scholar] [CrossRef]
- Thenmozhi, K.; Reddy, U.S. Crop Pest Classification Based on Deep Convolutional Neural Network and Transfer Learning. Comput. Electron. Agric. 2019, 164, 104906. [Google Scholar] [CrossRef]
- Cui, J.; Zhang, J.; Sun, G.; Zheng, B. Extraction and Research of Crop Feature Points Based on Computer Vision. Sensors 2019, 19, 2553. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Xu, Q.; Xiao, Y.; Tang, J.; Bin, L. Multi-scale Convolutional Capsule Network for Hyperspectral Image Classification. In Chinese Conference on Pattern Recognition and Computer Vision; Springer International Publishing: Cham, Switerland, 2019; pp. 749–760. [Google Scholar]
- Yan, P.; Su, Y.; Tian, X. Classification of Mars Lineament and Non-lineament Structure Based on ResNet50. In Proceedings of the 2020 IEEE International Conference on Advances in Electrical Engineering and Computer Applications, Dalian, China, 25–27 August 2020; pp. 437–441. [Google Scholar]
- Khalifa, N.E.; Loey, M.; Taha, M. Insect Pests Recognition Based on Deep Transfer Learning Models. J. Theor. Appl. Inf. Technol. 2020, 98, 60–68. [Google Scholar]
- Nanni, L.; Maguolo, G.; Pancino, F. Insect Pest Image Detection and Recognition Based on Bio-inspired Methods. Ecol. Inform. 2020, 57, 101089. [Google Scholar] [CrossRef] [Green Version]
- Ramalingam, B.; Mohan, R.E.; Pookkuttath, S.; Gómez, B.F.; Sairam Borusu, C.S.C.; Wee Teng, T.; Tamilselvam, Y.K. Remote Insects Trap Monitoring System Using Deep Learning Framework and IoT. Sensors 2020, 20, 5280. [Google Scholar] [CrossRef]
- Kasinathan, T.; Singaraju, D.; Uyyala, S.R. Insect Classification and Detection in Field Crops Using Modern Machine Learning Techniques. Inf. Process. Agric. 2021, 8, 446–457. [Google Scholar] [CrossRef]
- Karar, M.E.; Alsunaydi, F.; Albusaymi, S.; Alotaibi, S. A New Mobile Application of Agricultural Pests Recognition Using Deep Learning in Cloud Computing System. Alex. Eng. J. 2021, 60, 4423–4432. [Google Scholar] [CrossRef]
- Chen, H.C.; Widodo, A.M.; Wisnujati, A.; Rahaman, M.; Lin, J.C.W.; Chen, L.; Weng, C.E. AlexNet Convolutional Neural Network for Disease Detection and Classification of Tomato Leaf. Electronics 2022, 11, 951. [Google Scholar] [CrossRef]
- Xu, C.; Yu, C.; Zhang, S.; Wang, X. Multi-Scale Convolution-Capsule Network for Crop Insect Pest Recognition. Electronics 2022, 11, 1630. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Models | Accuracy | Precision | Recall |
|---|---|---|---|
| Yolov5 Darknet53 | 99.54% | 99.34% | 99.62% |
| Faster-RCNN ResNet50 | 98.13% | 99.52% | 99.56% |
| Mask-RCNN ResNet50 | 98.41% | 99.64% | 99.86% |
| Models | Accuracy | Precision | Recall |
|---|---|---|---|
| Yolov5 Darknet53 | 97.62% | 92.54% | 93.43% |
| Faster-RCNN ResNet101 | 99.43% | 91.42% | 92.84% |
| Mask-RCNN ResNet50 | 99.68% | 90.36% | 92.15% |
| Research | Methods | Accuracy | Classes |
|---|---|---|---|
| Iandola et al. (2016) [44] | SqueezeNet | 67.51% | 8 |
| Ning et al. (2017) [45] | SSD MobileNet | 92.12% | 8 |
| SSD Inception | 93.47% | 8 | |
| Li et al. (2018) [46] | CapsNet | 82.4% | 9 |
| Thenmozhi and Reddy (2019) [47] | DCNNT | 84.7% | 9 |
| Cui et al. (2019) [48] | Yolov2 | 87.66% | 8 |
| Wang et al. (2019) [49] | MS-CapsNet | 89.6% | 9 |
| Yan et al. (2020) [50] | ResNet50 | 85.5% | 9 |
| Khalifa et al. (2020) [51] | GoogleNet | 88.80% | 8 |
| Nanni et al. (2020) [52] | Bio-inspired Model | 92.4% | 10 |
| Ramalingam et al. (2020) [53] | Faster-RCNN ResNet50 | 96.06% | 8 |
| Kasinathan et al. (2021) [54] | CNN | 91.5% | 9 |
| 93.9% | 5 | ||
| Karar et al. (2021) [55] | Faster-RCNN VGG16 | 98.9% | 5 |
| Chen et al. (2022) [56] | AlexNet | 80.3% | 9 |
| Xu et al. (2022) [57] | MSCC | 92.4% | 9 |
| Ours | Mask-RCNN ResNet50 | 99.6% | 10 |
| Faster-RCNN ResNet101 | 99.4% | 10 | |
| Yolov5 Darknet53 | 97.6% | 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Zhu, T.; Li, X.; Dong, J.; Liu, J. Recommending Advanced Deep Learning Models for Efficient Insect Pest Detection. Agriculture 2022, 12, 1065. https://doi.org/10.3390/agriculture12071065
Li W, Zhu T, Li X, Dong J, Liu J. Recommending Advanced Deep Learning Models for Efficient Insect Pest Detection. Agriculture. 2022; 12(7):1065. https://doi.org/10.3390/agriculture12071065
Chicago/Turabian StyleLi, Wei, Tengfei Zhu, Xiaoyu Li, Jianzhang Dong, and Jun Liu. 2022. "Recommending Advanced Deep Learning Models for Efficient Insect Pest Detection" Agriculture 12, no. 7: 1065. https://doi.org/10.3390/agriculture12071065
APA StyleLi, W., Zhu, T., Li, X., Dong, J., & Liu, J. (2022). Recommending Advanced Deep Learning Models for Efficient Insect Pest Detection. Agriculture, 12(7), 1065. https://doi.org/10.3390/agriculture12071065