
A Real-Time Sorting Robot System for Panax Notoginseng Taproots Equipped with an Improved Deeplabv3+ Model


Abstract
:1. Introduction
2. Materials and Methods
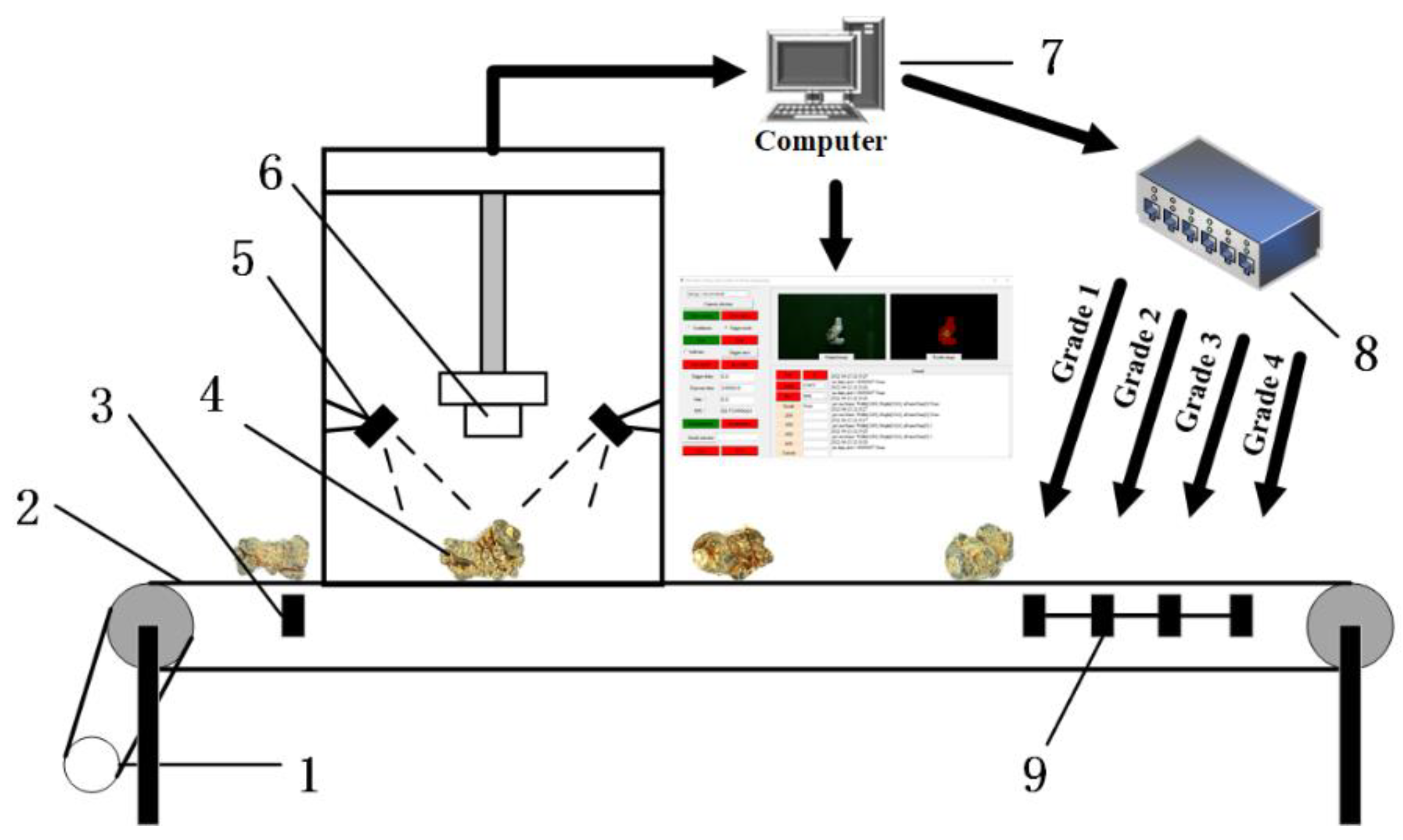
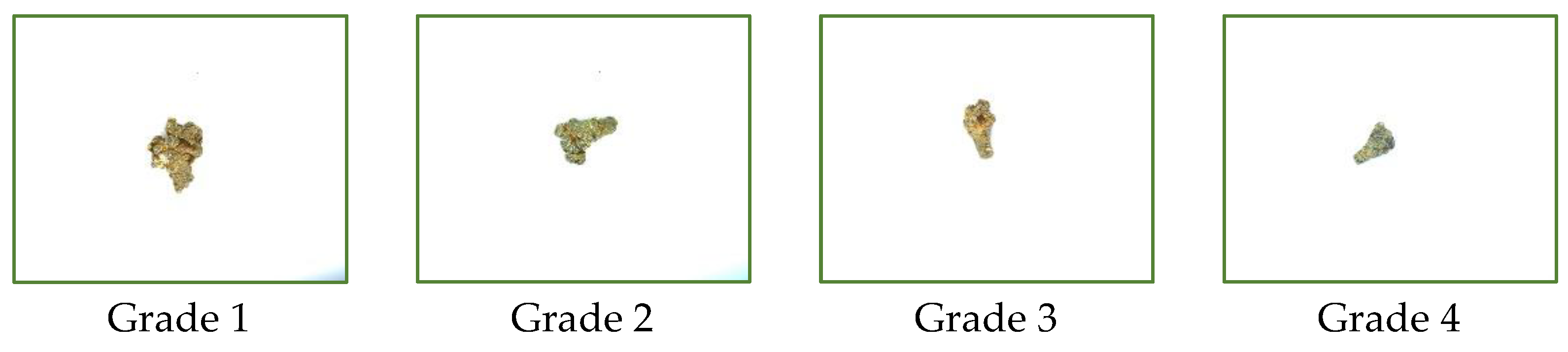
2.1. Image Data Acquisition
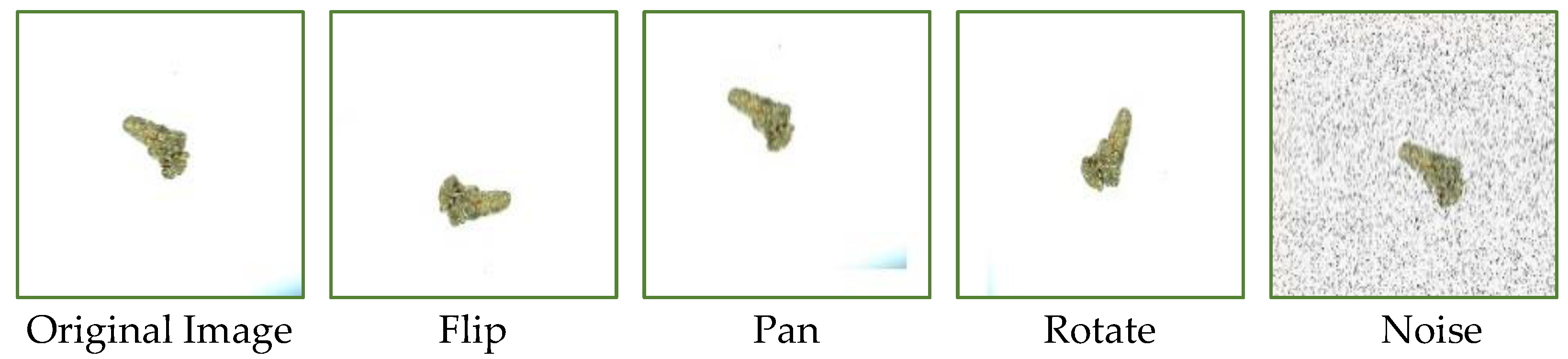
2.2. Image Data Enhancement and Dataset Establishment
2.3. Panax Notoginseng Quick Identification and Sorting Method
2.3.1. Introduction to Semantic Segmentation Models
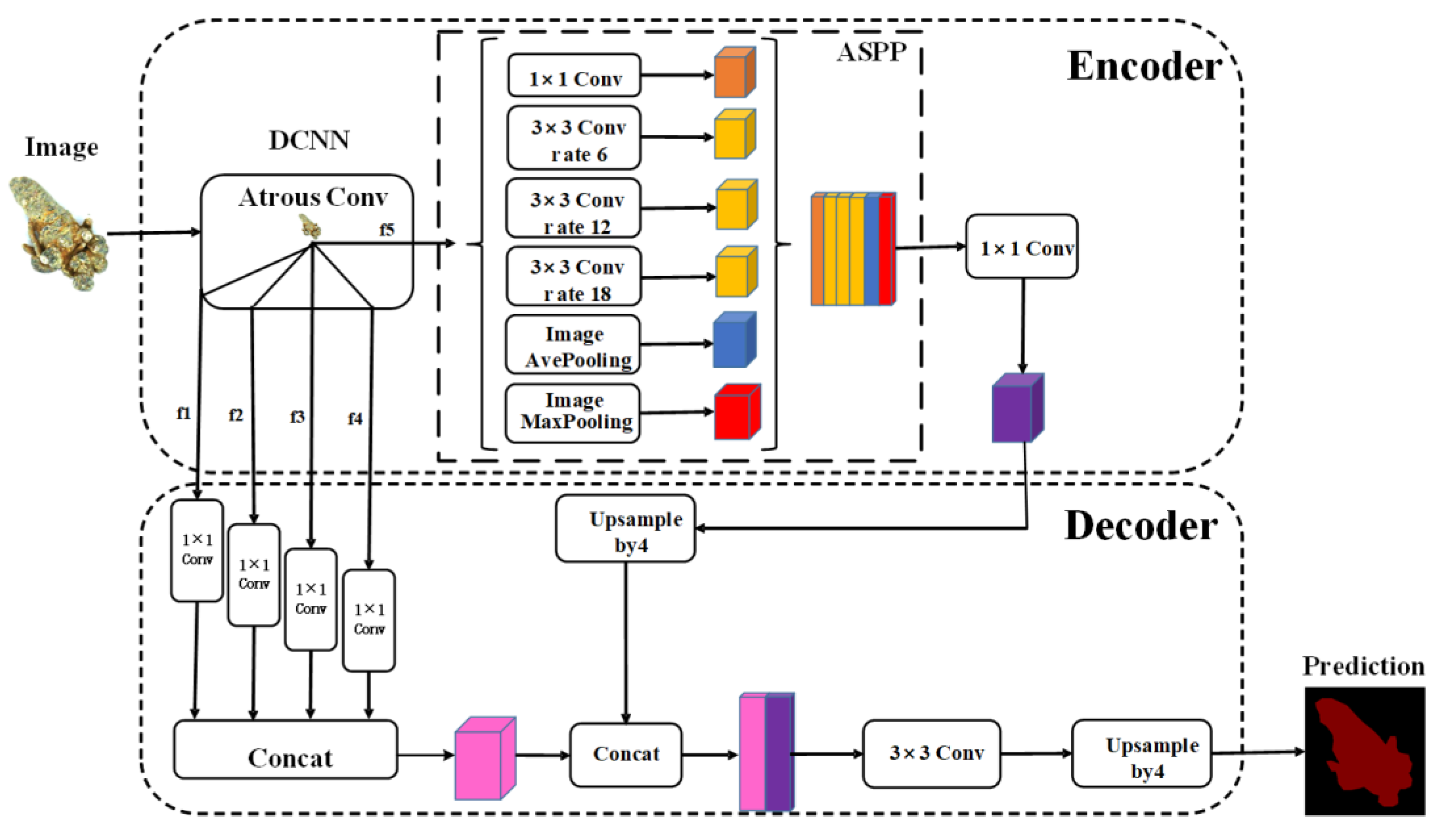
2.3.2. Improved Panax Notoginseng Taproot DeepLabv3+ Grading Model
2.3.3. Focal Loss Function
2.4. Experiment Environment and Parameter Settings
2.5. Model Evaluation Metrics
3. Model Results and Analysis
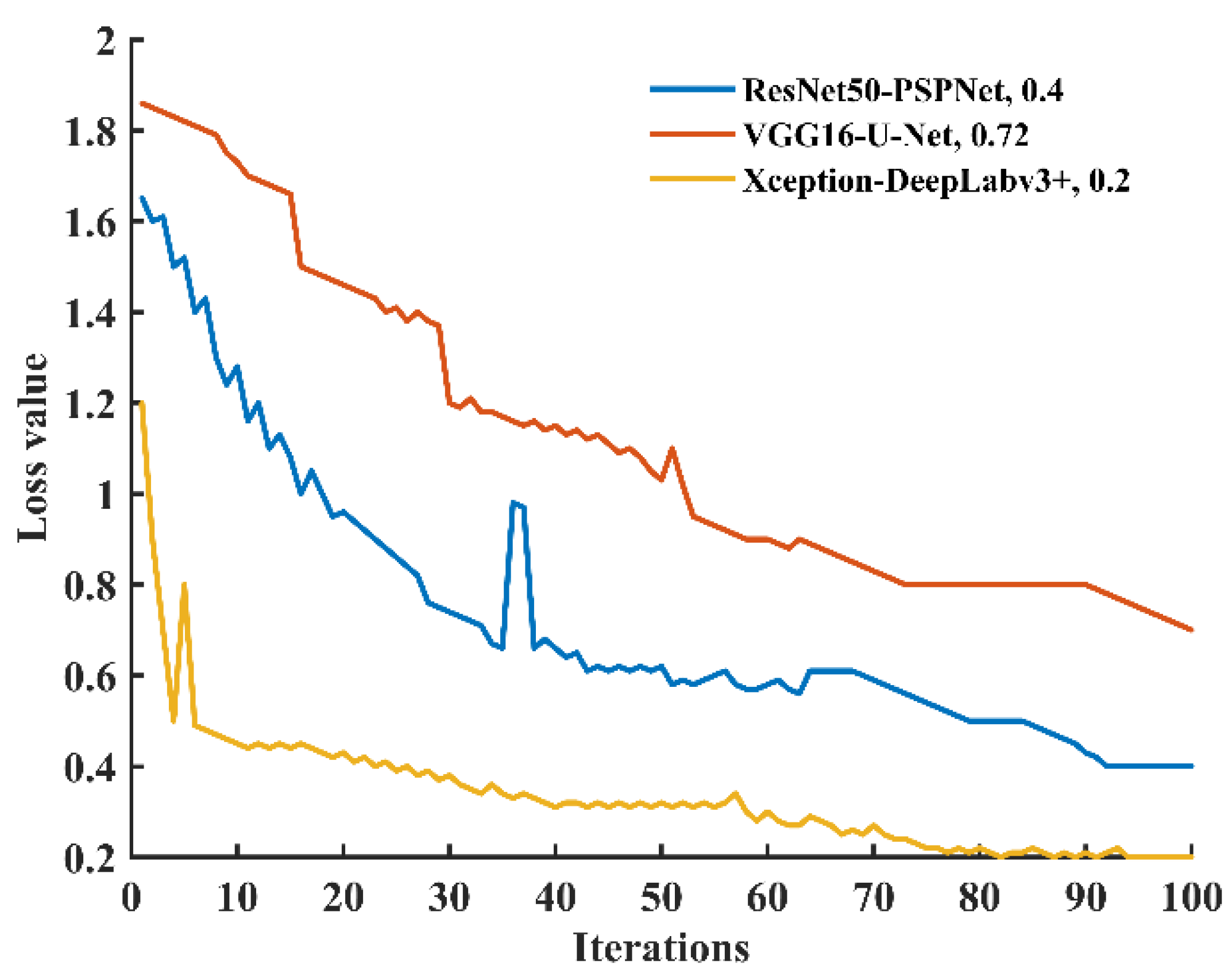
3.1. Comparison of Different Semantic Segmentation Models
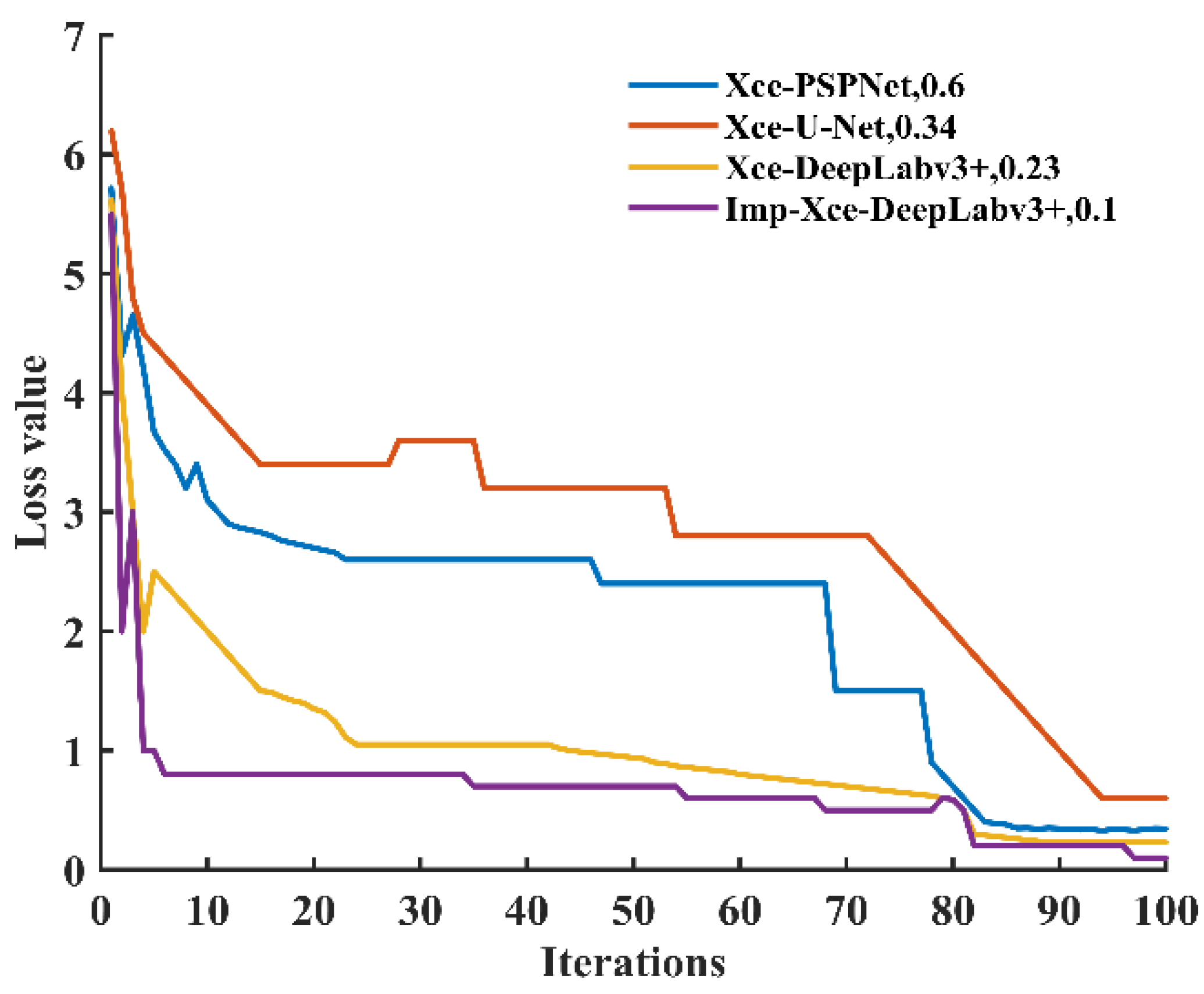
3.2. Comparison of Improved DeepLabv3+ Segmentation Network Models
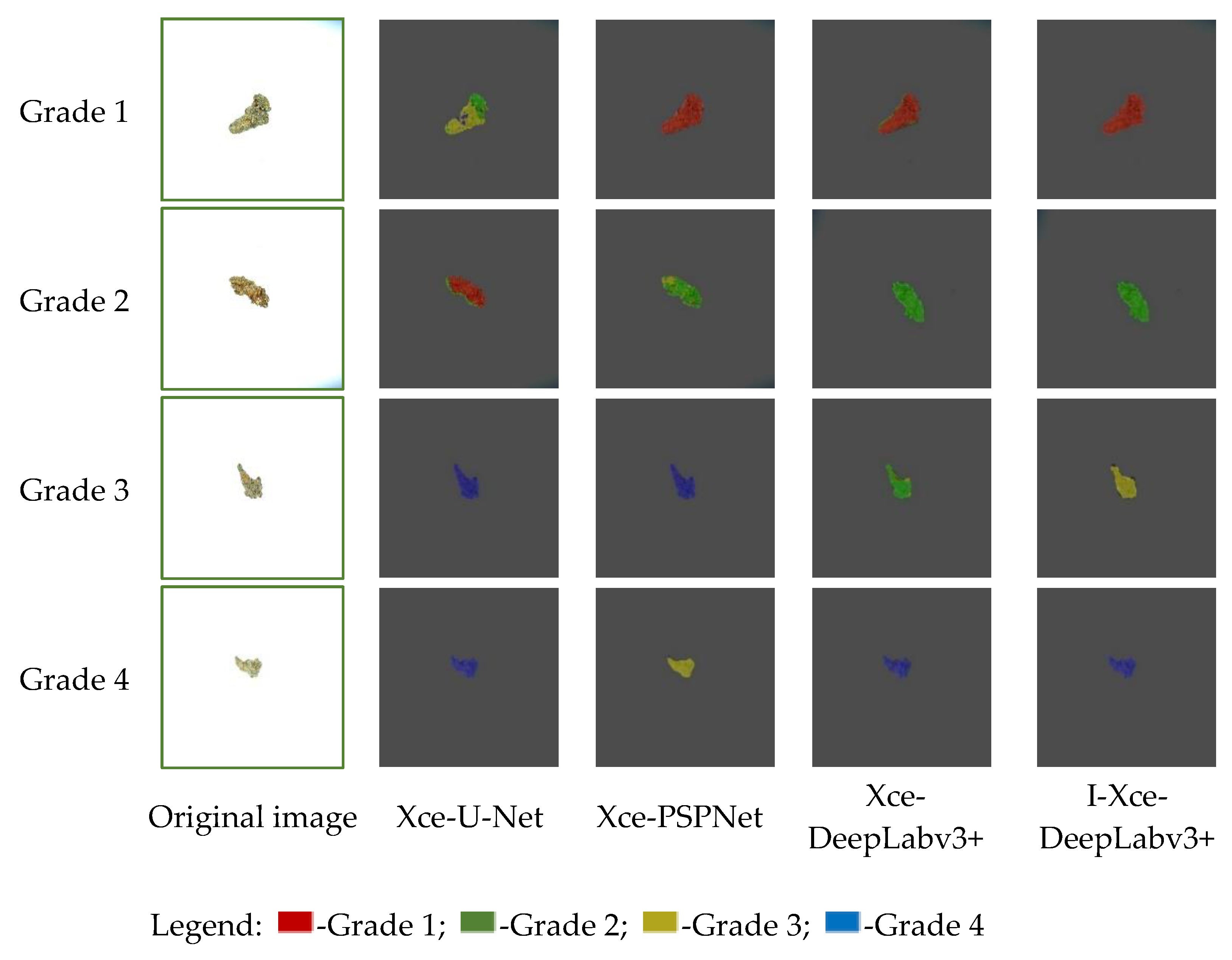
Visualization of the Effect of Different Segmentation Models under Xception
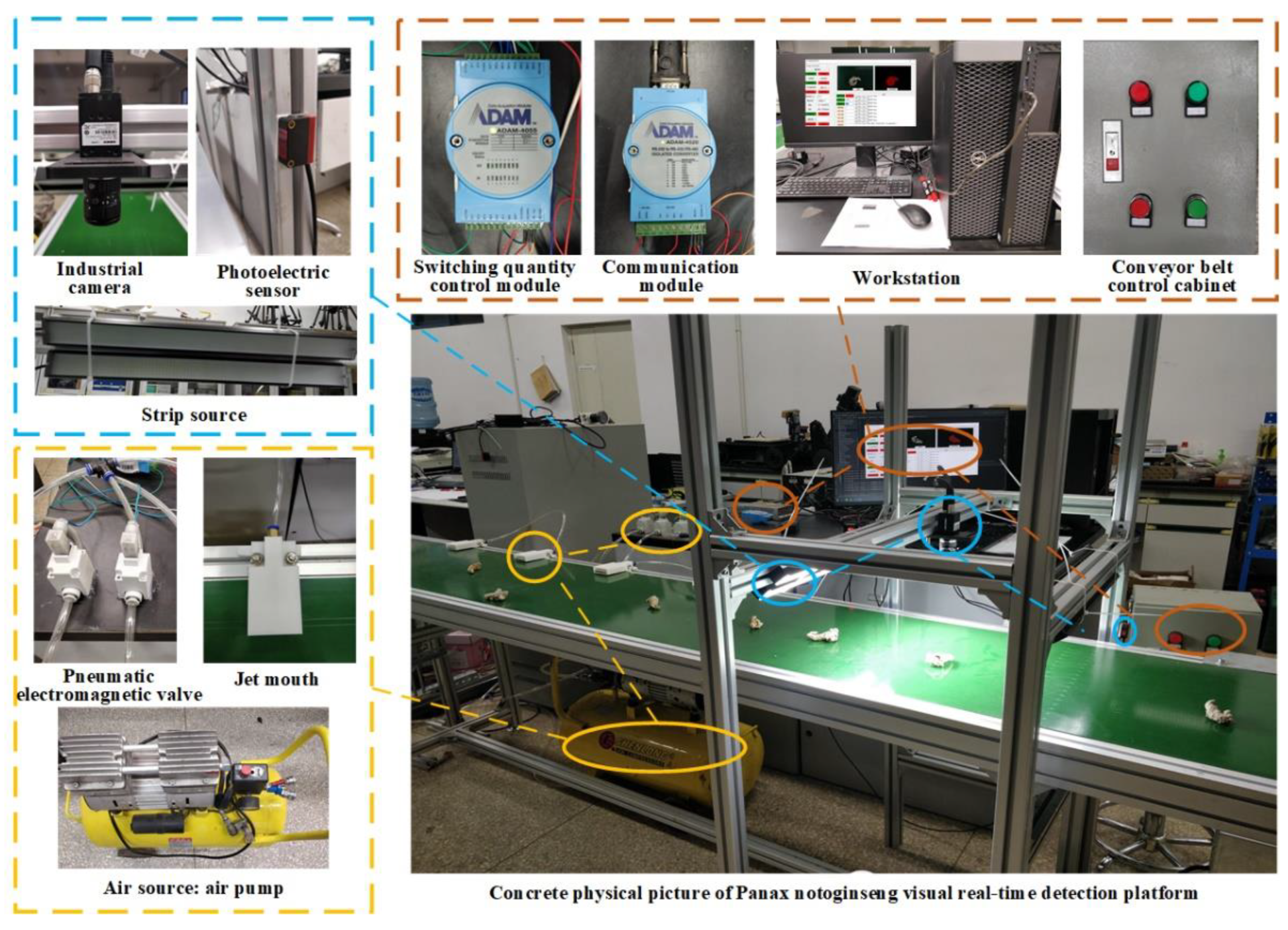
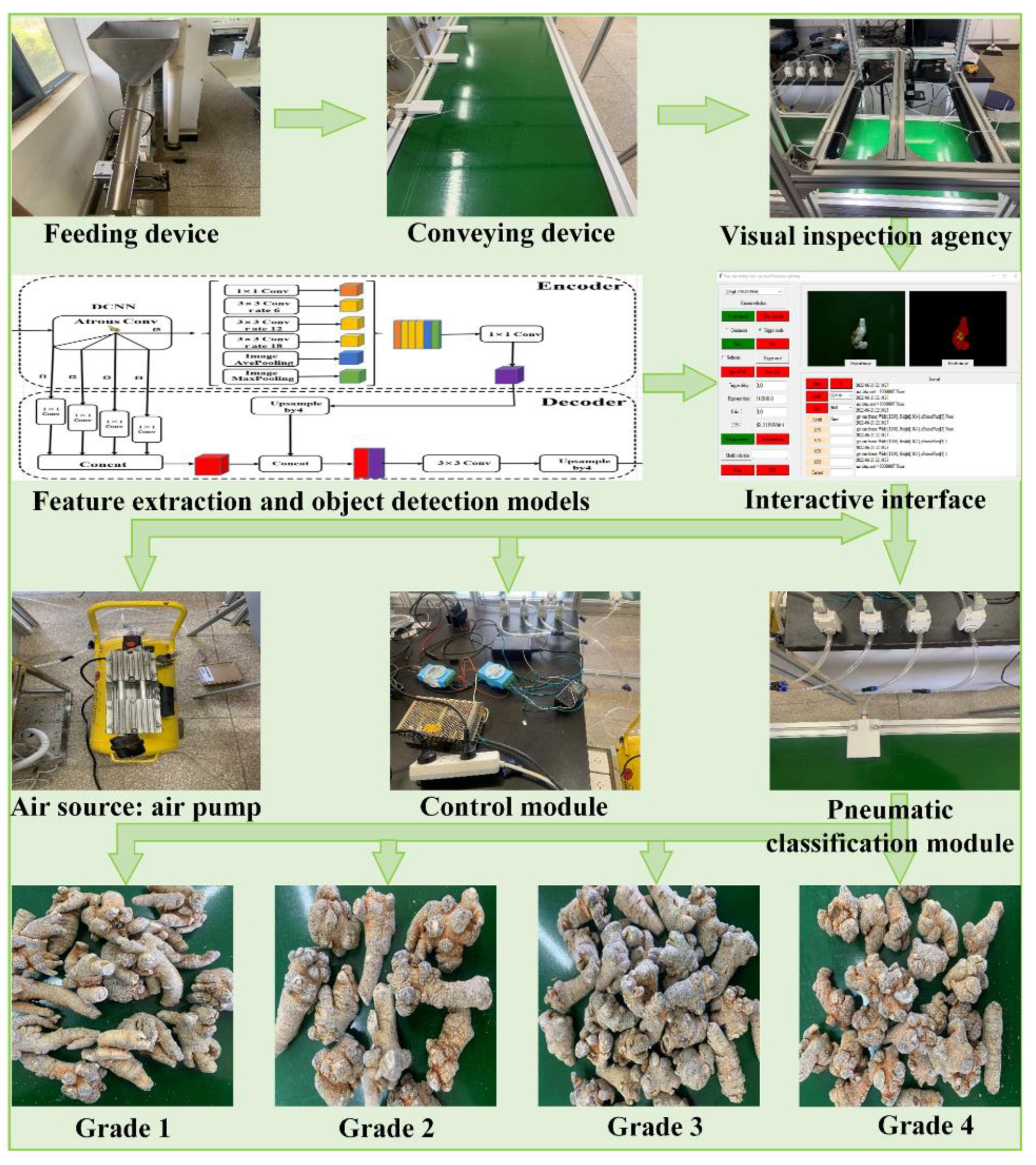
4. Design and Experiment of the Sorting Robot System
4.1. System Hardware Design
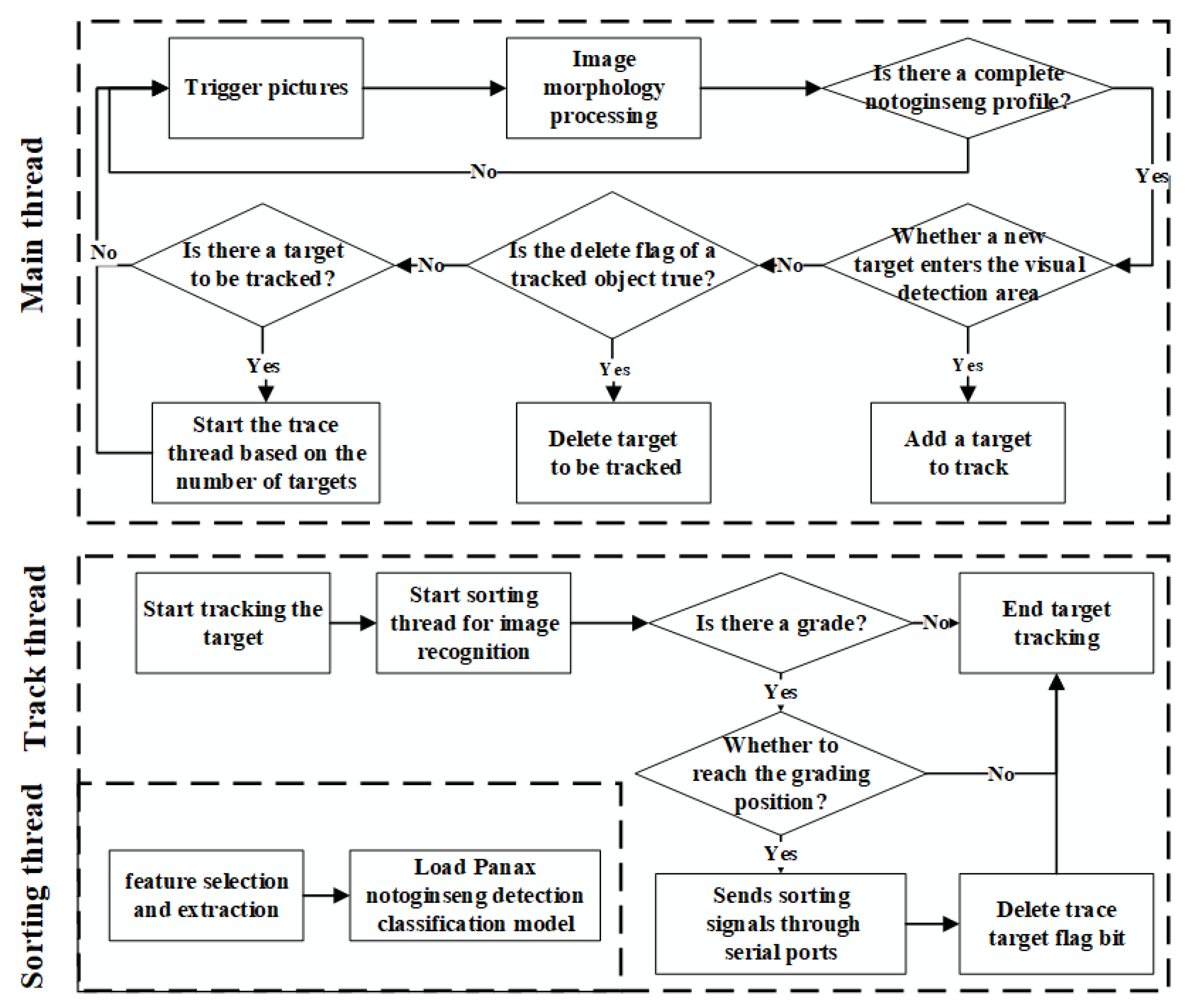
4.2. System Software Design
4.2.1. Design Strategy of the System Control Software
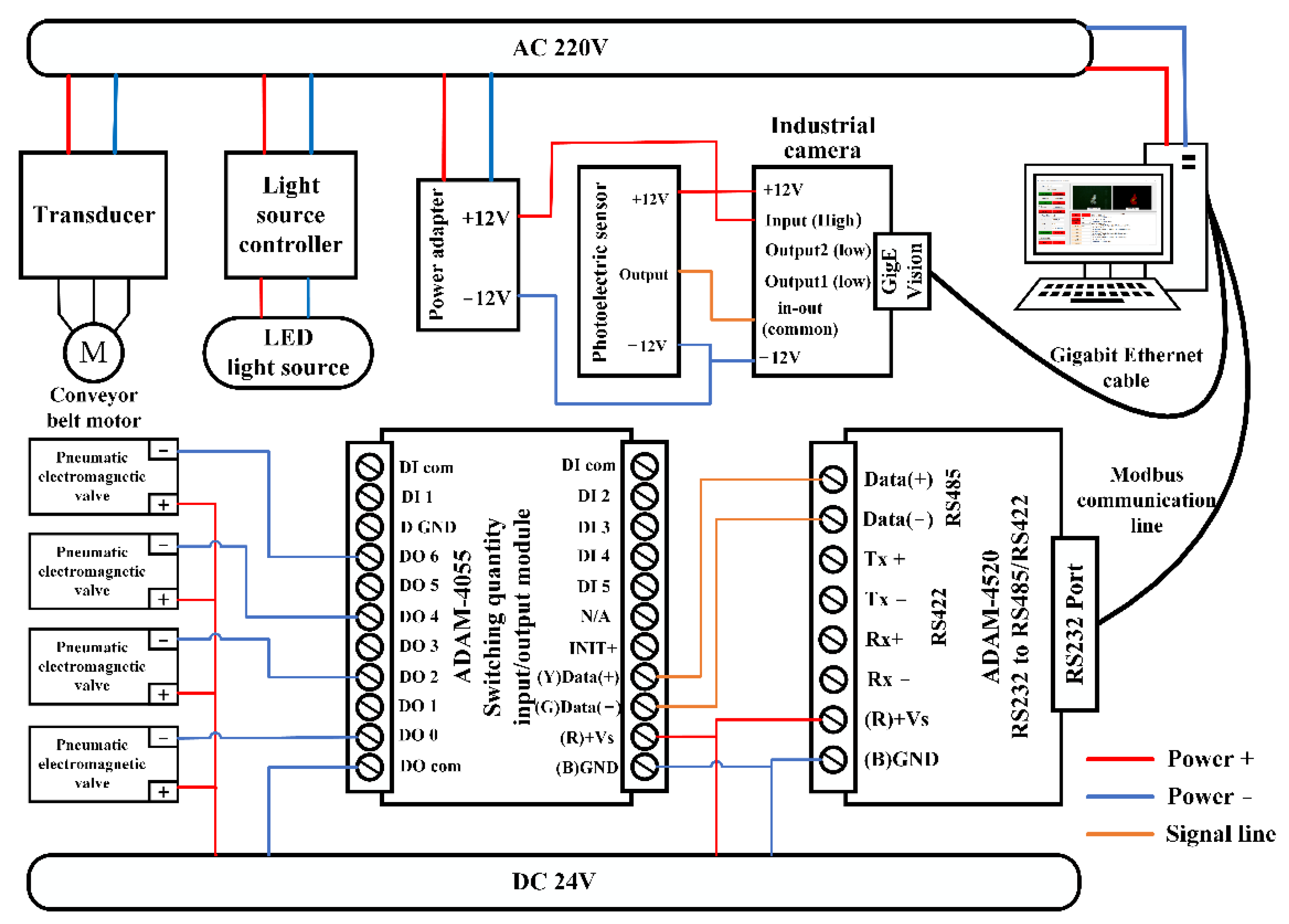
4.2.2. System Circuit Design
4.2.3. Sorting Experiment
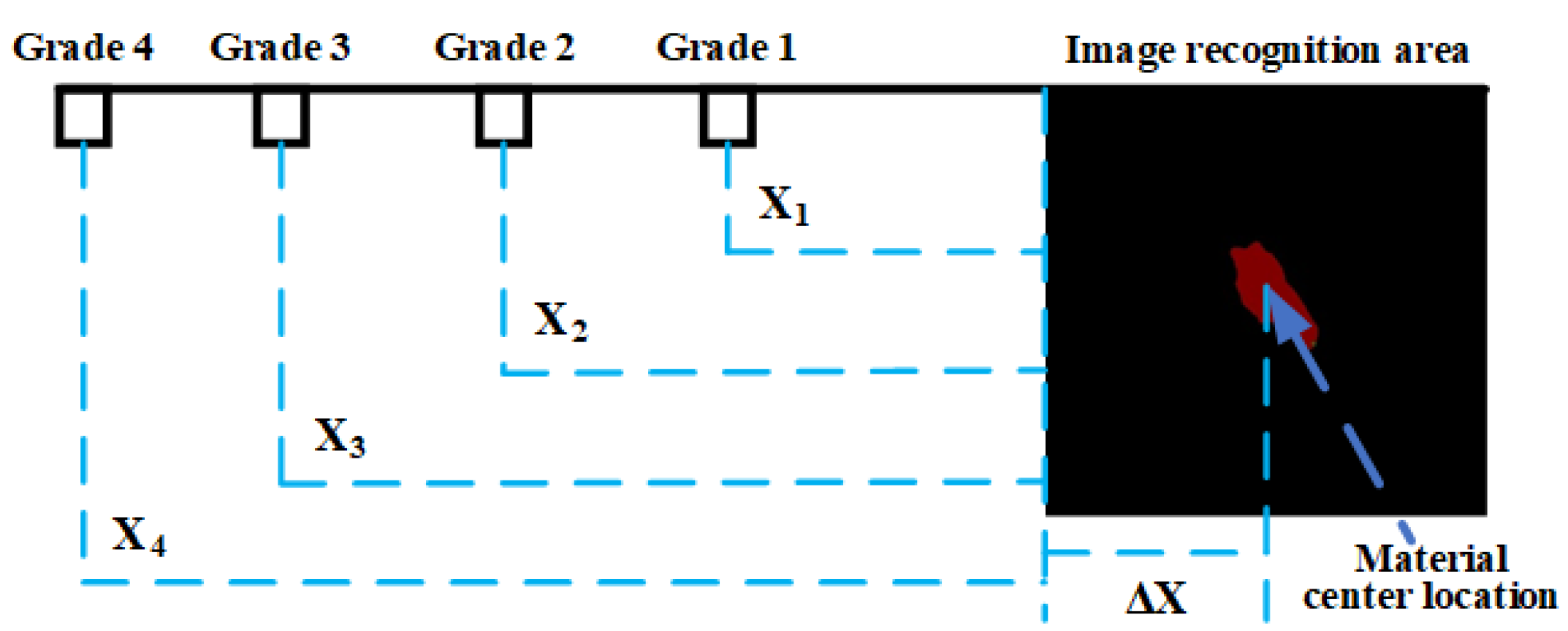
4.2.4. Positioning Delay Calculation
4.3. Experimental Evaluation Index
4.4. Experimental Results and Analysis
4.4.1. System Static Recognition Experiment
4.4.2. System Dynamic Sorting Experiment
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Que, Z.L.; Pang, D.Q.; Chen, Y.; Chen, Z.J.; Li, J.Z.; Wei, J.C. Current Situation of Planting, Harvesting and Processing of Panax notoginseng. Jiangsu Agric. Sci. 2020, 48, 41–45. (In Chinese) [Google Scholar] [CrossRef]
- Liu, D.-H.; Xu, N.; Guo, L.-P.; Jin, Y.; Cui, X.-M.; Yang, Y.; Zhu, X.-Y.; Zhan, Z.-L.; Huang, L.-Q. Qualitative characteristics and classification study on commodity specification and grade standard of Panax notoginsen. Chin. J. Chin. Mater. Med. 2016, 41, 776–785. [Google Scholar] [CrossRef]
- Prabhakar, M.; Raja, P.; Apolo, O.E.; Pérez-Ruiz, M. Intelligent Fruit Yield Estimation for Orchards Using Deep Learning Based Semantic Segmentation Techniques—A Review. Front. Plant Sci. 2021, 12, 684328. [Google Scholar] [CrossRef]
- Saleem, M.H.; Potgieter, J.; Arif, K.M. Automation in Agriculture by Machine and Deep Learning Techniques: A Review of Recent Developments. Precis. Agric. 2021, 22, 2053–2091. [Google Scholar] [CrossRef]
- Jia, W.; Zhang, Z.; Shao, W.; Hou, S.; Ji, Z.; Liu, G.; Yin, X. FoveaMask: A fast and accurate deep learning model for green fruit instance segmentation. Comput. Electron. Agric. 2021, 191, 106488. [Google Scholar] [CrossRef]
- Boogaard, F.P.; Rongen, K.S.A.H.; Kootstra, G.W. Robust node detection and tracking in fruit-vegetable crops using deep learning and multi-view imaging. Biosyst. Eng. 2020, 192, 117–132. [Google Scholar] [CrossRef]
- Rong, D.; Xie, L.; Ying, Y. Computer vision detection of foreign objects in walnuts using deep learning. Comput. Electron. Agric. 2019, 162, 1001–1010. [Google Scholar] [CrossRef]
- Zhao, J.Q.; Zhang, X.H.; Yan, J.W.; Qiu, X.L.; Yao, X.; Tian, Y.C.; Zhu, Y.; Cao, W.X. A Wheat Spike Detection Method in UAV Images Based on Improved YOLOv5. Remote Sens. 2021, 13, 3095. [Google Scholar] [CrossRef]
- Lee, U.; Islam, M.P.; Kochi, N.; Tokuda, K.; Nakano, Y.; Naito, H.; Kawasaki, Y.; Ota, T.; Sugiyama, T.; Ahn, D.H. An Automated, Clip-Type, Small Internet of Things Camera-Based Tomato Flower and Fruit Monitoring and Harvest Prediction System. Sensors 2022, 22, 2456. [Google Scholar] [CrossRef]
- Alam, M.S.; Alam, M.; Tufail, M.; Khan, M.U.; Güneş, A.; Salah, B.; Nasir, F.E.; Saleem, W.; Khan, M.T. TobSet: A New Tobacco Crop and Weeds Image Dataset and Its Utilization for Vision-Based Spraying by Agricultural Robots. Appl. Sci. 2022, 12, 1308. [Google Scholar] [CrossRef]
- Tufail, M.; Iqbal, J.; Tiwana, M.I.; Alam, M.S.; Khan, Z.A.; Khan, M.T. Identification of Tobacco Crop Based on Machine Learning for a Precision Agricultural Sprayer. IEEE Access 2021, 9, 23814–23825. [Google Scholar] [CrossRef]
- Arshaghi, A.; Ashourin, M.; Ghabeli, L. Detection and Classification of Potato Diseases Potato Using a New Convolution Neural Network Architecture. Trait. Du Signal 2021, 38, 1783–1791. [Google Scholar] [CrossRef]
- Zhou, H.Y.; Zhuang, Z.L.; Liu, Y.; Liu, Y.; Zhang, X. Defect Classification of Green Plums Based on Deep Learning. Sensors 2020, 20, 6993. [Google Scholar] [CrossRef] [PubMed]
- Fang, L.; Wu, Y.; Li, Y.; Guo, H.; Zhang, H.; Wang, X.; Xi, R.; Hou, J. Ginger Seeding Detection and Shoot Orientation Discrimination Using an Improved YOLOv4-LITE Network. Agronomy 2021, 11, 2328. [Google Scholar] [CrossRef]
- Kateb, F.A.; Monowar, M.M.; Hamid, M.A.; Ohi, A.Q.; Mridha, M.F. FruitDet: Attentive Feature Aggregation for Real-Time Fruit Detection in Orchards. Agronomy 2021, 11, 2440. [Google Scholar] [CrossRef]
- Li, D.; Sun, X.; Lv, S.; Elkhouchlaa, H.; Jia, Y.; Yao, Z.; Lin, P.; Zhou, H.; Zhou, Z.; Shen, J.; et al. A novel approach for the 3D localization of branch picking points based on deep learning applied to longan harvesting UAVs. Comput. Electron. Agric. 2022, 199, 107191. [Google Scholar] [CrossRef]
- Tian, Y.; Yang, G.; Wang, Z.; Li, E.; Liang, Z. Instance segmentation of apple flowers using the improved mask R–CNN model. Biosyst. Eng. 2020, 193, 264–278. [Google Scholar] [CrossRef]
- Gené-Mola, J.; Sanz-Cortiella, R.; Rosell-Polo, J.R.; Morros, J.-R.; Ruiz-Hidalgo, J.; Vilaplana, V.; Gregorio, E. Fruit detection and 3D location using instance segmentation neural networks and structure-from-motion photogrammetry. Comput. Electron. Agric. 2020, 169, 105165. [Google Scholar] [CrossRef]
- Minaee, S.; Boykov, Y.Y.; Porikli, F.; Plaza, A.J.; Kehtarnavaz, N.; Terzopoulos, D. Image Segmentation Using Deep Learning: A Survey. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 44, 3523–3542. [Google Scholar] [CrossRef]
- Liu, M.; Jia, W.; Wang, Z.; Niu, Y.; Yang, X.; Ruan, C. An accurate detection and segmentation model of obscured green fruits. Comput. Electron. Agric. 2022, 197, 106984. [Google Scholar] [CrossRef]
- Su, D.; Kong, H.; Qiao, Y.; Sukkarieh, S. Data augmentation for deep learning based semantic segmentation and crop-weed classification in agricultural robotics. Comput. Electron. Agric. 2021, 190, 106418. [Google Scholar] [CrossRef]
- Kang, J.; Liu, L.; Zhang, F.; Shen, C.; Wang, N.; Shao, L. Semantic segmentation model of cotton roots in-situ image based on attention mechanism. Comput. Electron. Agric. 2021, 189, 106370. [Google Scholar] [CrossRef]
- Sun, K.; Wang, X.; Liu, S.; Liu, C. Apple, peach, and pear flower detection using semantic segmentation network and shape constraint level set. Comput. Electron. Agric. 2021, 185, 106150. [Google Scholar] [CrossRef]
- Hu, G.; Zhang, E.; Zhou, J.; Zhao, J.; Gao, Z.; Sugirbay, A.; Jin, H.; Zhang, S.; Chen, J. Infield Apple Detection and Grading Based on Multi-Feature Fusion. Horticulturae 2021, 7, 276. [Google Scholar] [CrossRef]
- Anh, P.T.Q.; Thuyet, D.Q.; Kobayashi, Y. Image classification of root-trimmed garlic using multi-label and multi-class classification with deep convolutional neural network. Postharvest Biol. Technol. 2022, 190, 111956. [Google Scholar] [CrossRef]
- Deng, L.; Li, J.; Han, Z. Online defect detection and automatic grading of carrots using computer vision combined with deep learning methods. LWT 2021, 149, 111832. [Google Scholar] [CrossRef]
- Baigvand, M.; Banakar, A.; Minaei, S.; Khodaei, J.; Behroozi-Khazaei, N. Machine vision system for grading of dried figs. Comput. Electron. Agric. 2015, 119, 158–165. [Google Scholar] [CrossRef]
- Sofu, M.M.; Er, O.; Kayacan, M.C.; Cetişli, B. Design of an automatic apple sorting system using machine vision. Comput. Electron. Agric. 2016, 127, 395–405. [Google Scholar] [CrossRef]
- Wu, Z.; Luo, K.; Cao, C.; Liu, G.; Wang, E.; Li, W. Fast location and classification of small targets using region segmentation and a convolutional neural network. Comput. Electron. Agric. 2020, 169, 105207. [Google Scholar] [CrossRef]
- Thuyet, D.Q.; Kobayashi, Y.; Matsuo, M. A robot system equipped with deep convolutional neural network for autonomous grading and sorting of root-trimmed garlics. Comput. Electron. Agric. 2020, 178, 105727. [Google Scholar] [CrossRef]
- Beeche, C.; Singh, J.P.; Leader, J.K.; Gezer, S.; Oruwari, A.P.; Dansingani, K.K.; Chhablani, J.; Pu, J. Super U-Net: A modularized generalizable architecture. Pattern Recognit. 2022, 128, 108669. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Song, Y.; Su, J.; Fang, Y.; Shen, L.; Mi, Z.; Su, B. Segmentation of field grape bunches via an improved pyramid scene parsing network. Int. J. Agric. Biol. Eng. 2021, 14, 185–194. [Google Scholar] [CrossRef]
- Chen, Z.; Ting, D.; Newbury, R.; Chen, C. Semantic segmentation for partially occluded apple trees based on deep learning. Comput. Electron. Agric. 2021, 181, 105952. [Google Scholar] [CrossRef]
- Jeong, S.; Lee, Y.-M.; Lee, S. Development of an automatic sorting system for fresh ginsengs by image processing techniques. Hum.-Cent. Comput. Info 2017, 7, 41. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Model Size/M | Training Time/h | MPA/% | MIoU/% |
|---|---|---|---|---|
| VGG16-U-Net | 527 | 10 h | 60.2 | 75.34 |
| ResNet50-PSPNet | 178 | 7 h | 72.78 | 83.67 |
| Xception-DeepLabv3+ | 158 | 9 h | 78.98 | 88.98 |
| Model | Model Size/M | Detection Time/s | MPA/% | MIoU/% |
|---|---|---|---|---|
| Xce-PSPNet | 234 | 1.35 | 73.98 | 81.97 |
| Xce-U-Net | 105 | 0.65 | 65.21 | 75.89 |
| Xce-DeepLabv3+ | 158 | 0.34 | 78.98 | 88.98 |
| I-Xce-DeepLabv3+ | 152 | 0.22 | 85.72 | 90.32 |
| Grade | Recognition Result | |||||
|---|---|---|---|---|---|---|
| Grade 1 | Grade 2 | Grade 3 | Grade 4 | Recognition Accuracy | Average Value | |
| Grade 1 | 48 | 1 | 1 | 0 | 96% | 81% |
| Grade 2 | 10 | 35 | 5 | 0 | 70% | |
| Grade 3 | 0 | 4 | 38 | 8 | 76% | |
| Grade 4 | 0 | 4 | 5 | 41 | 82% | |
| Error rate | 17.2% | 20.4% | 22.4% | 16.3% | 19% | |
| Grade | Sorting Results | |||||
|---|---|---|---|---|---|---|
| Grade 1 | Grade 2 | Grade 3 | Grade 4 | Sorting Accuracy | Average Value | |
| Grade 1 | 47 | 3 | 0 | 0 | 94% | 77% |
| Grade 2 | 5 | 32 | 13 | 0 | 64% | |
| Grade 3 | 0 | 13 | 35 | 2 | 70% | |
| Grade 4 | 0 | 2 | 8 | 40 | 80% | |
| False detection rate | 9.62% | 36% | 37.5% | 4.76% | 21.97% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, F.; Lin, Y.; Zhu, Y.; Li, L.; Cui, X.; Gao, Y. A Real-Time Sorting Robot System for Panax Notoginseng Taproots Equipped with an Improved Deeplabv3+ Model. Agriculture 2022, 12, 1271. https://doi.org/10.3390/agriculture12081271
Zhang F, Lin Y, Zhu Y, Li L, Cui X, Gao Y. A Real-Time Sorting Robot System for Panax Notoginseng Taproots Equipped with an Improved Deeplabv3+ Model. Agriculture. 2022; 12(8):1271. https://doi.org/10.3390/agriculture12081271
Chicago/Turabian StyleZhang, Fujie, Yuhao Lin, Yinlong Zhu, Lixia Li, Xiuming Cui, and Yongping Gao. 2022. "A Real-Time Sorting Robot System for Panax Notoginseng Taproots Equipped with an Improved Deeplabv3+ Model" Agriculture 12, no. 8: 1271. https://doi.org/10.3390/agriculture12081271
APA StyleZhang, F., Lin, Y., Zhu, Y., Li, L., Cui, X., & Gao, Y. (2022). A Real-Time Sorting Robot System for Panax Notoginseng Taproots Equipped with an Improved Deeplabv3+ Model. Agriculture, 12(8), 1271. https://doi.org/10.3390/agriculture12081271