
Design and Experimental Investigation of a Transplanting Mechanism for Super Rice Pot Seedlings

Abstract
:1. Introduction
2. Materials and Methods
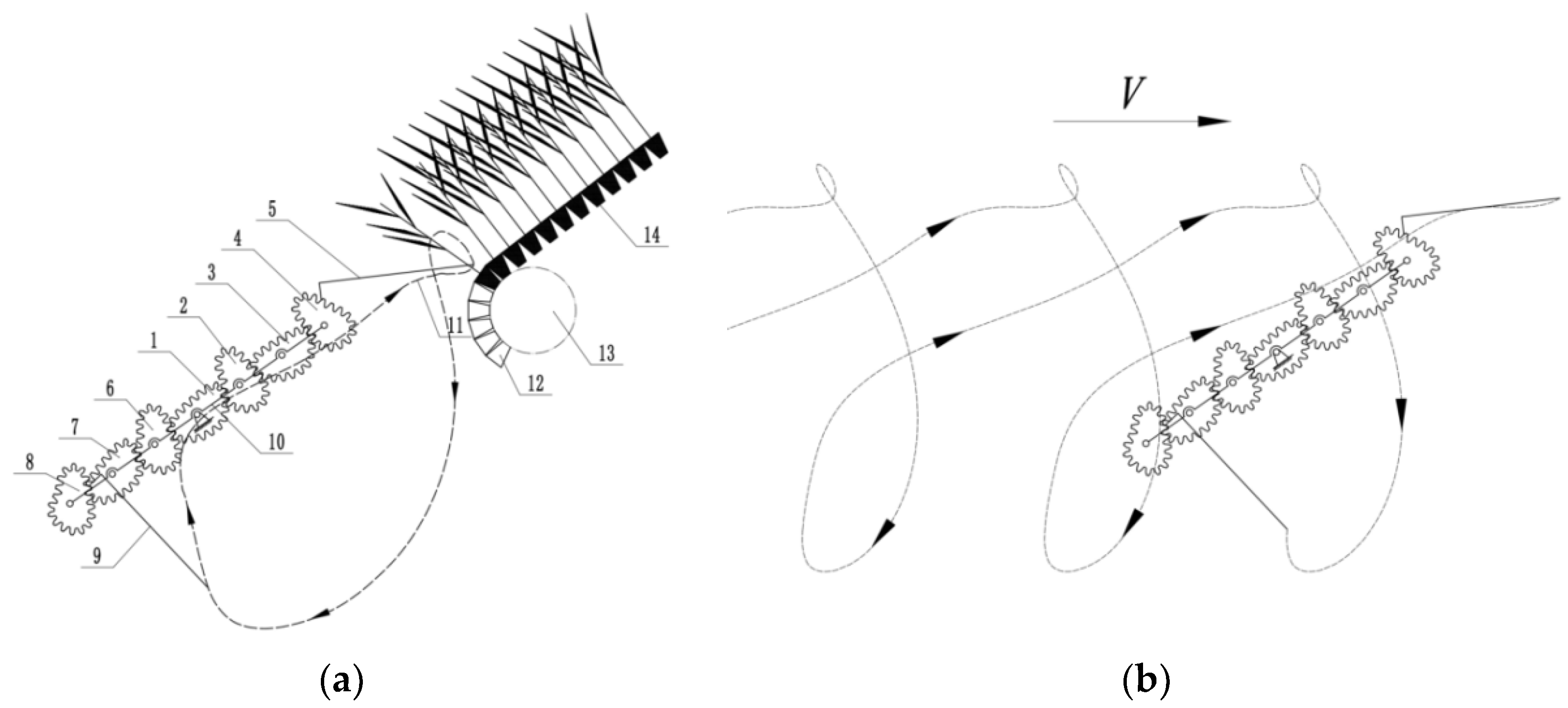
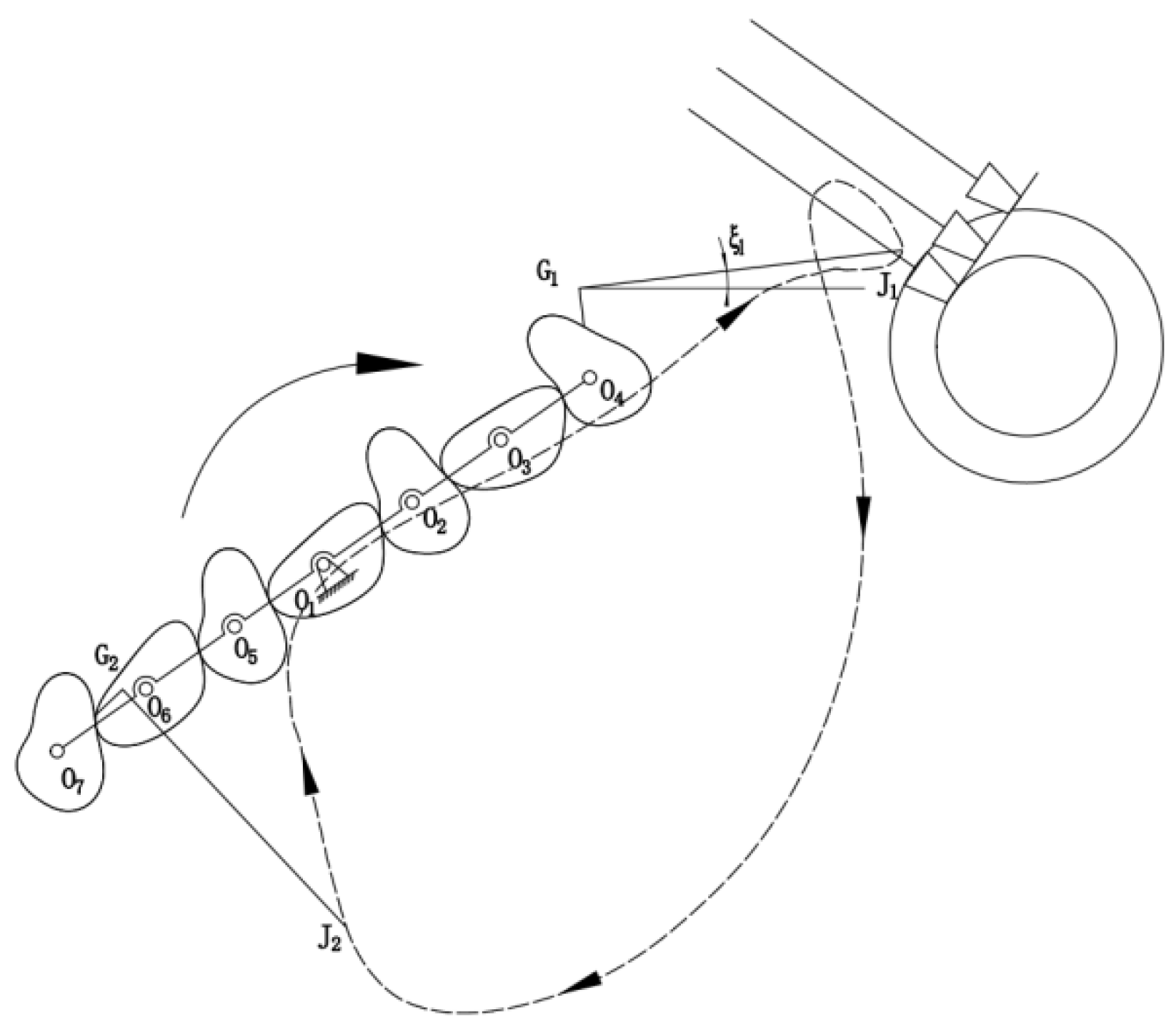
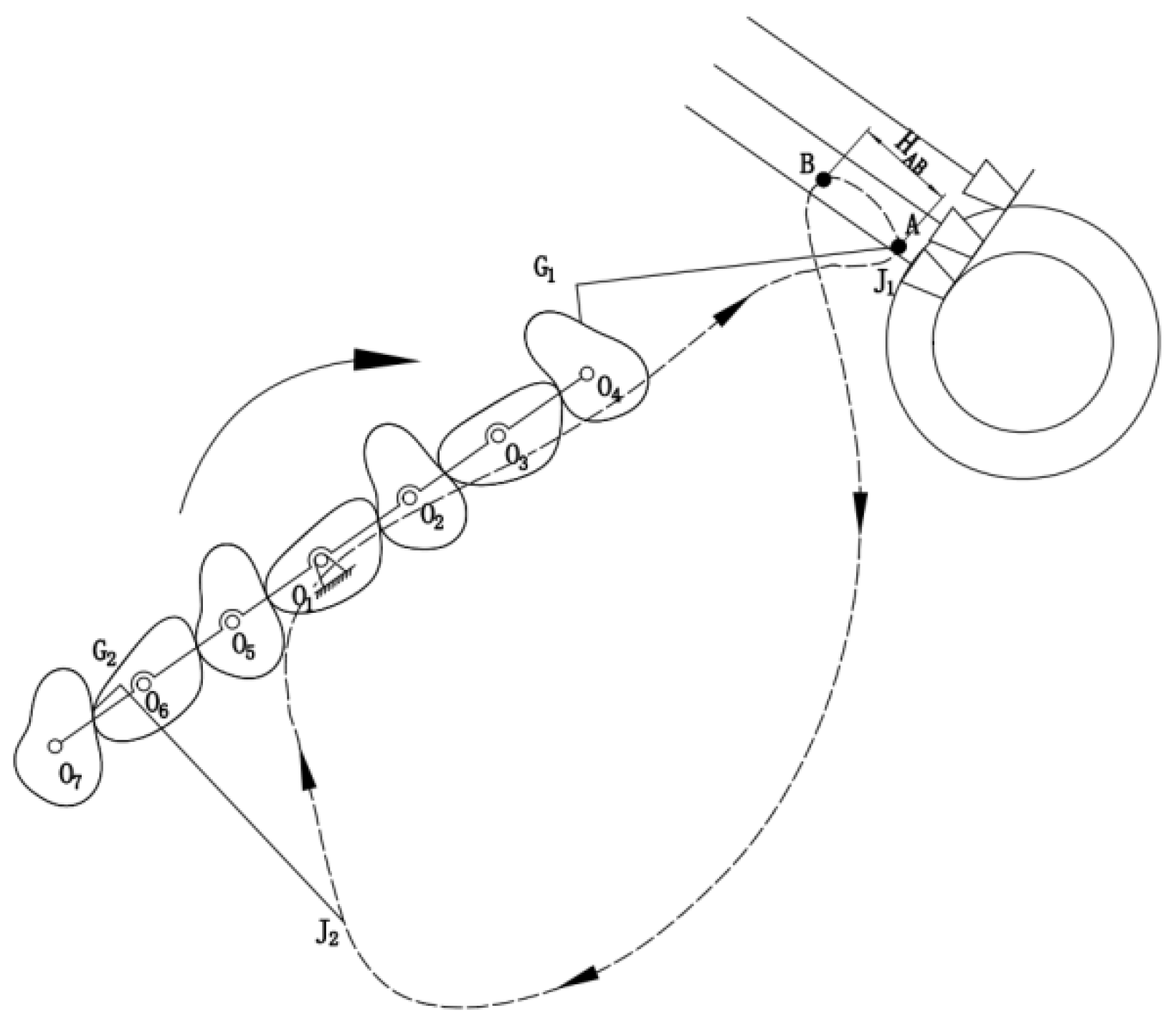
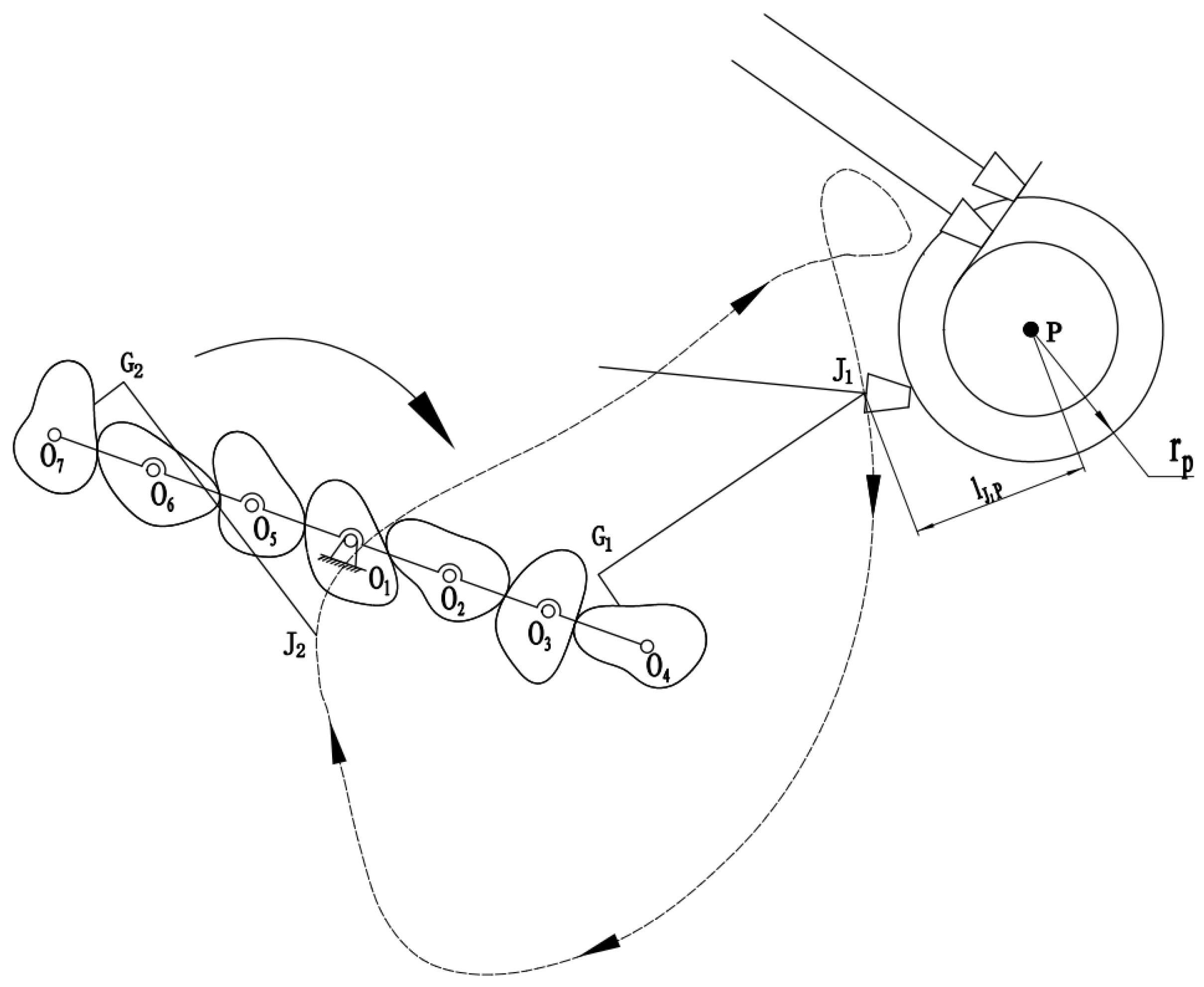
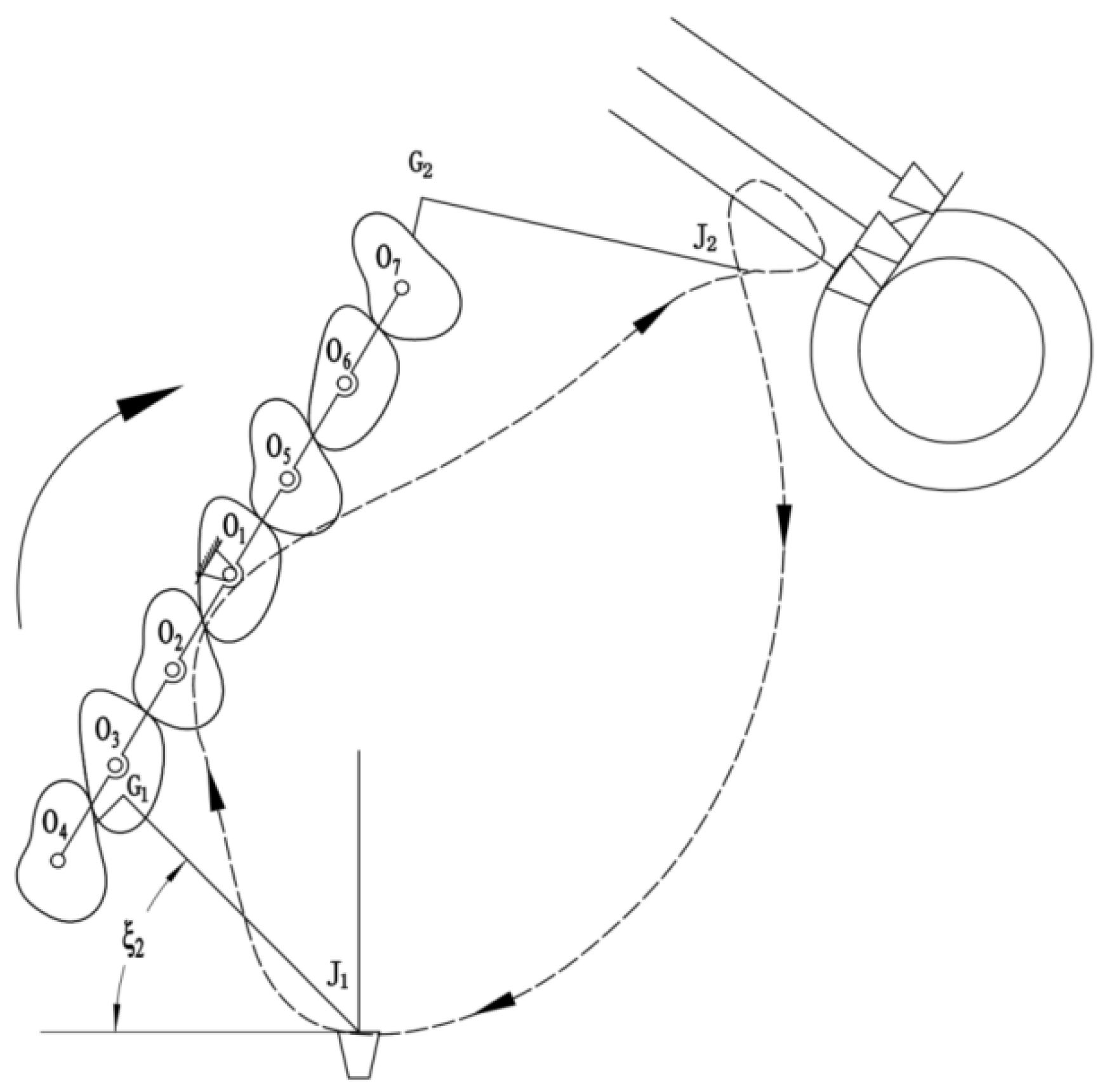
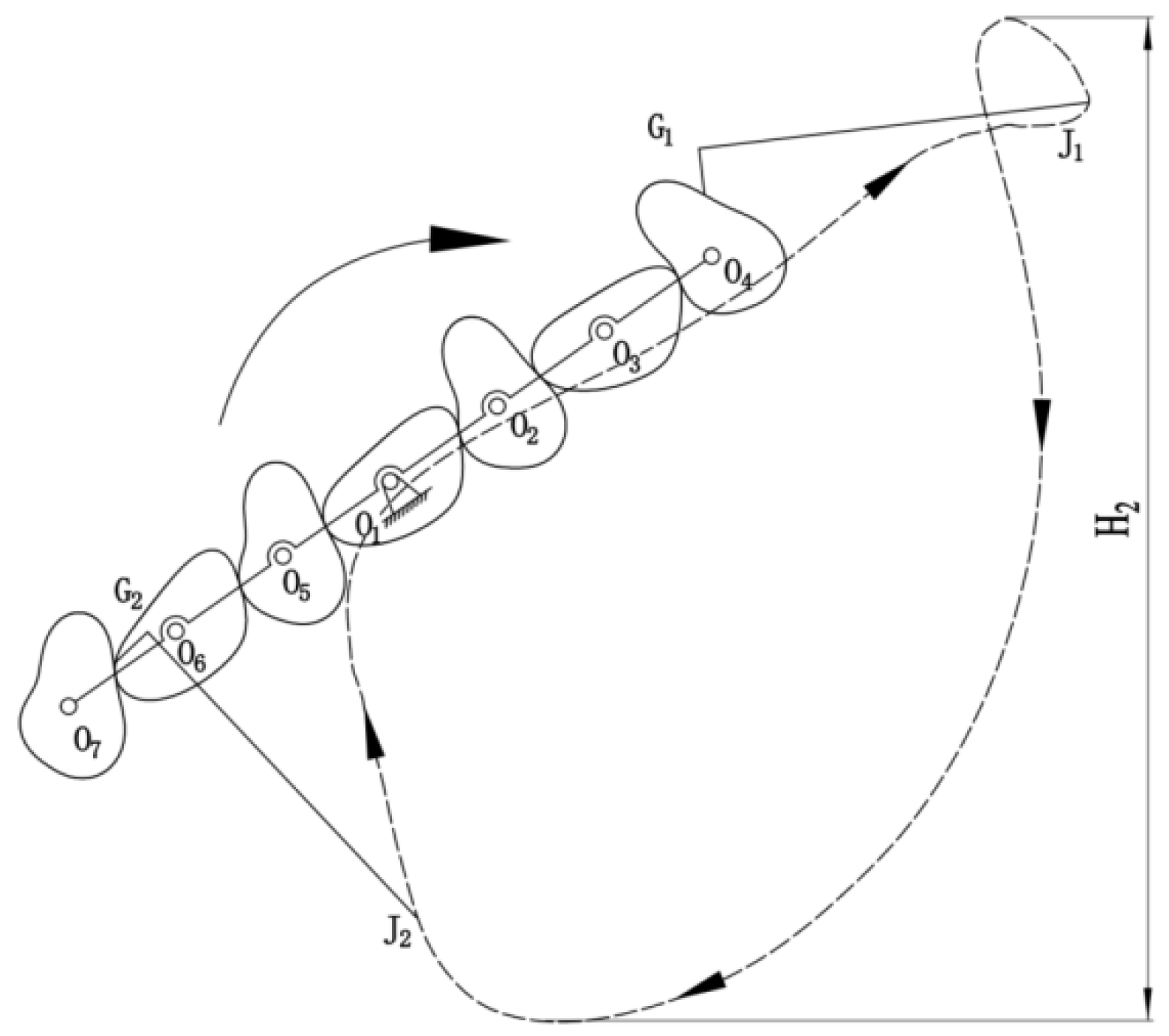
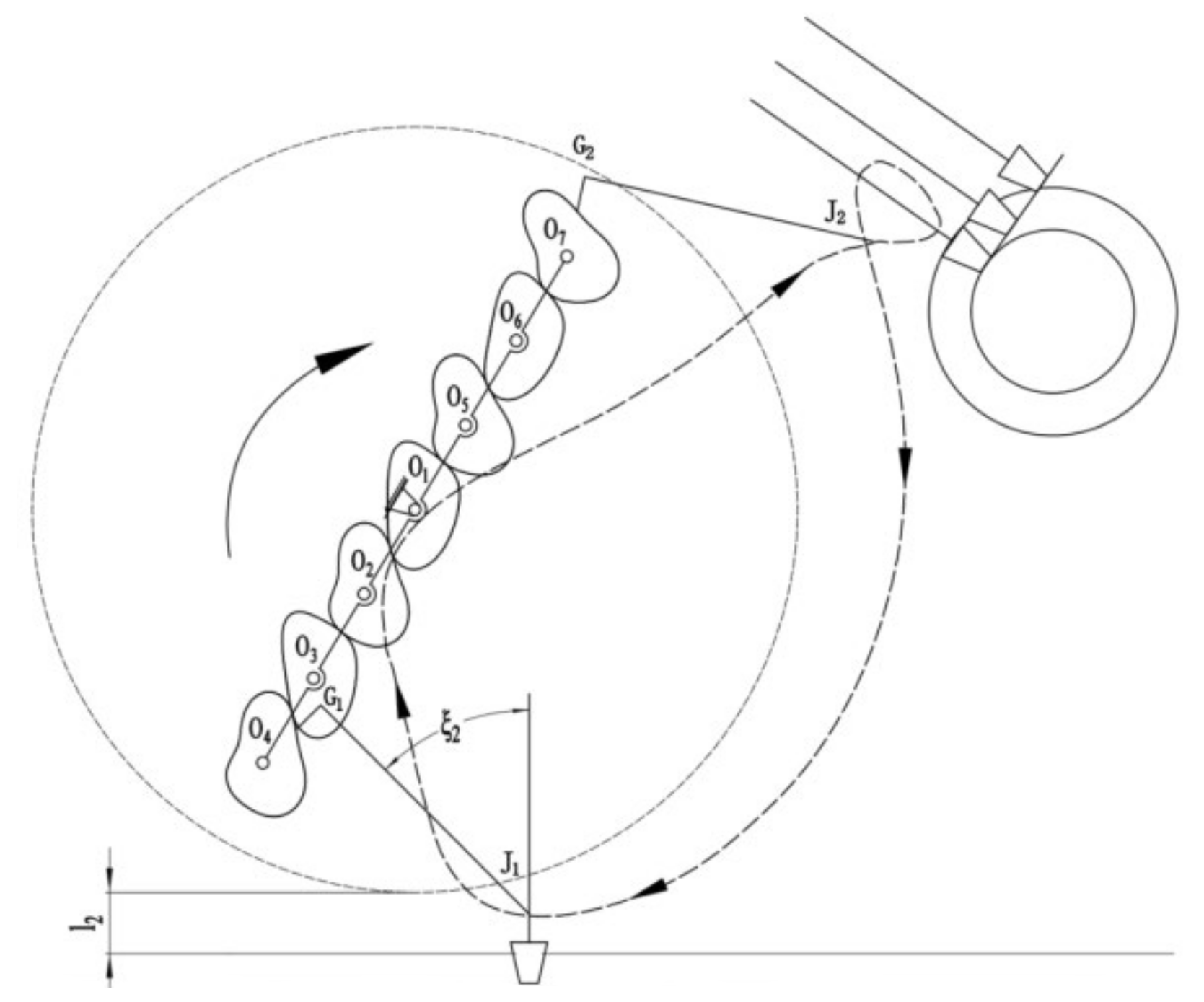
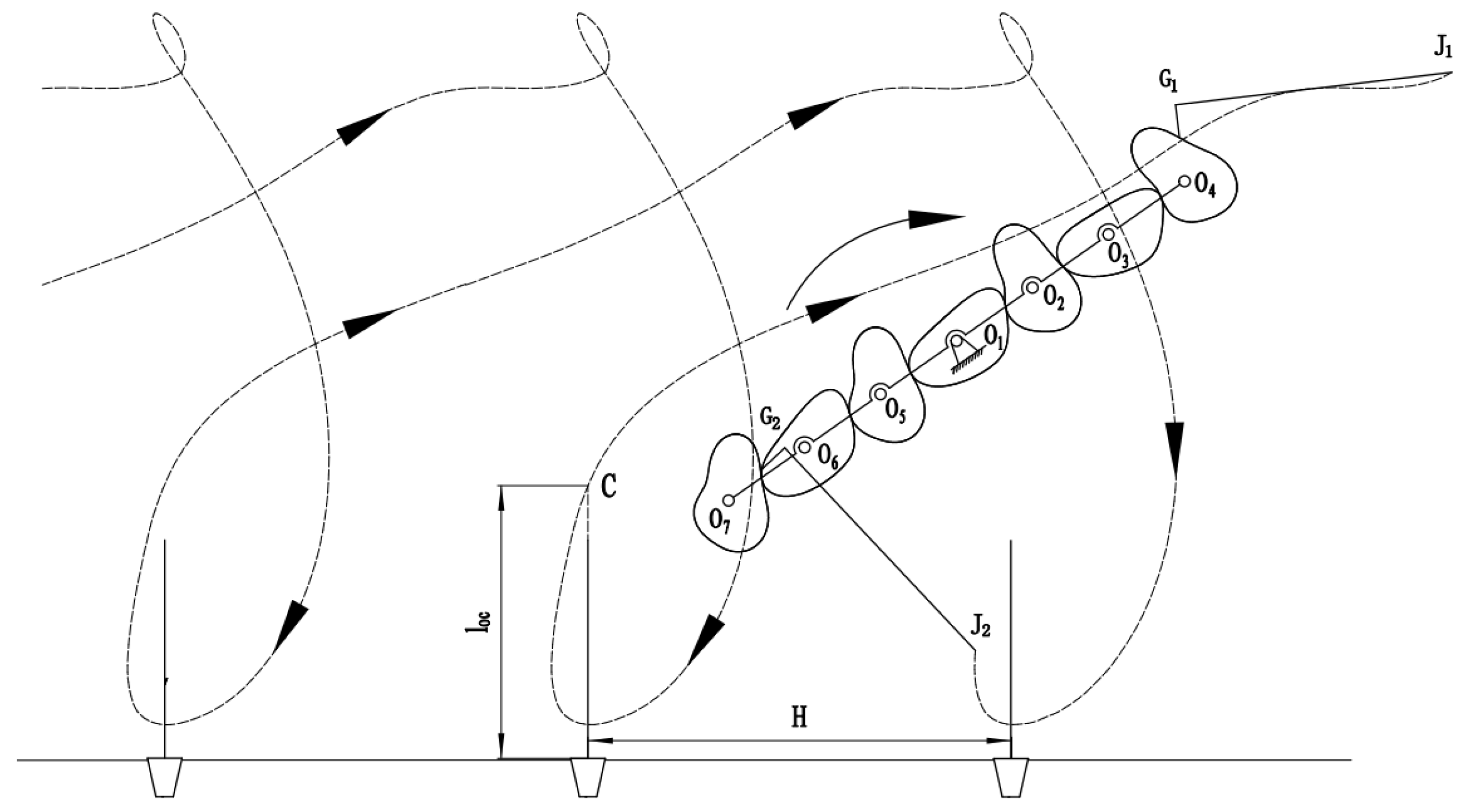
2.1. Working Principle
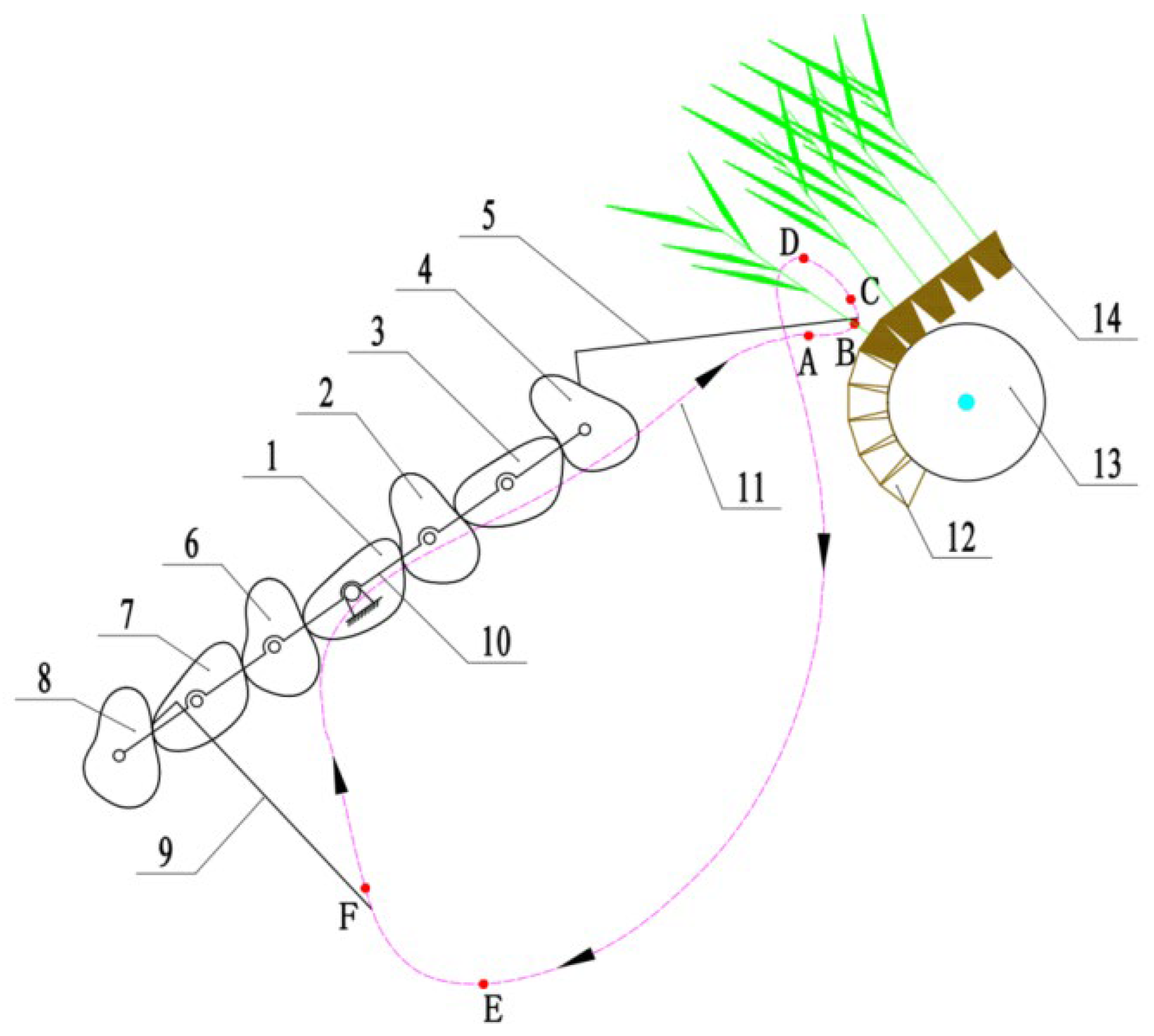
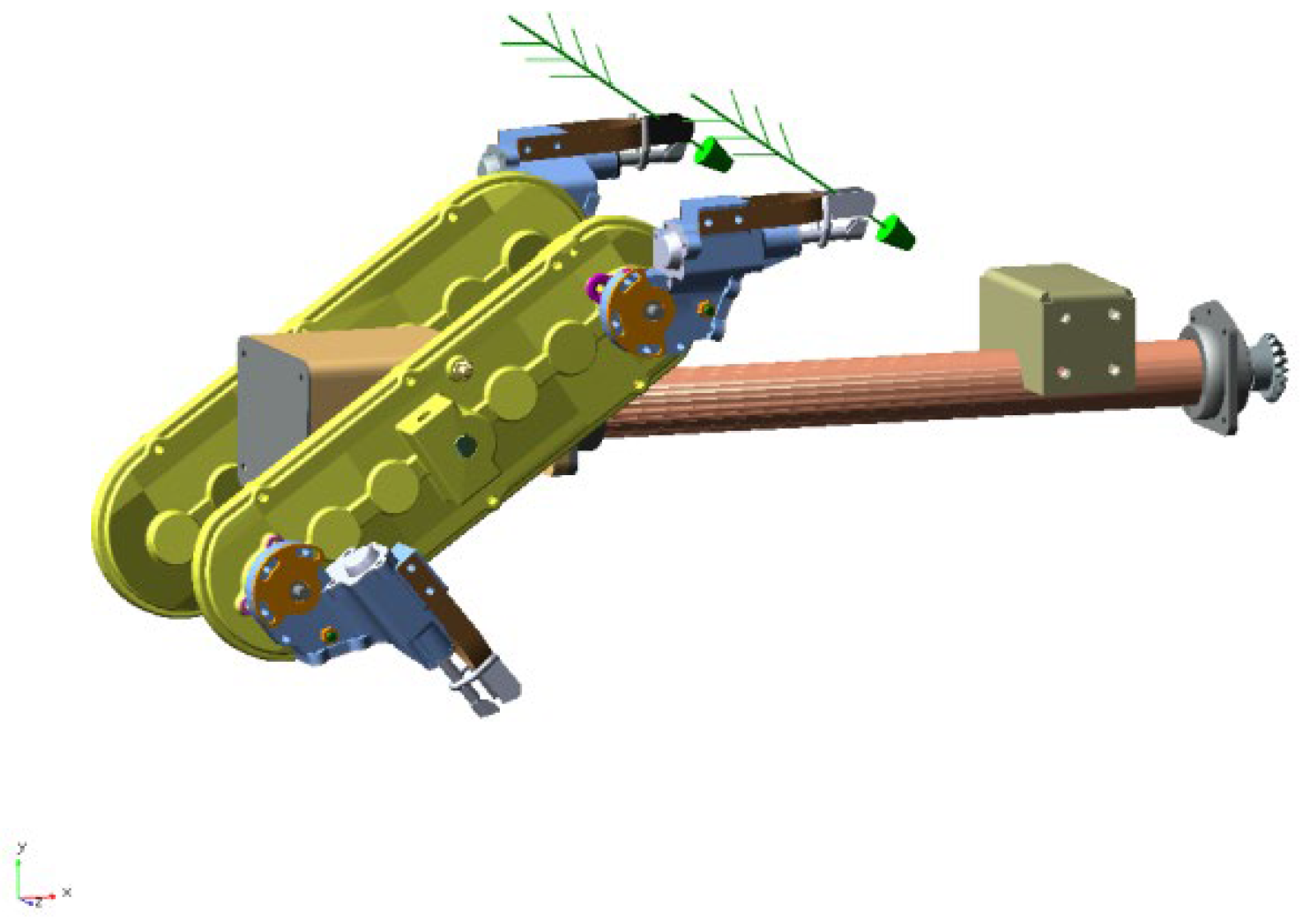
2.2. Composition
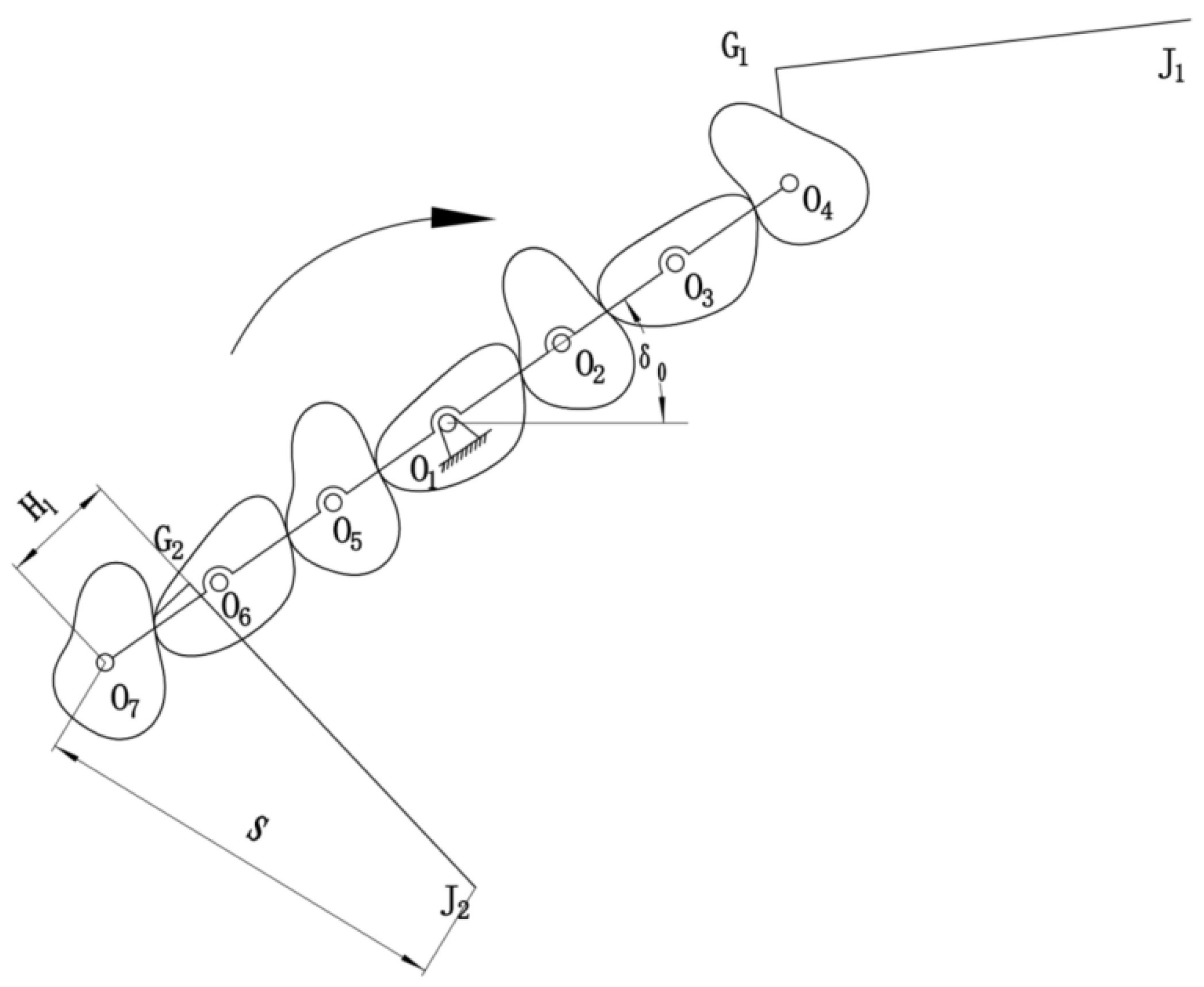
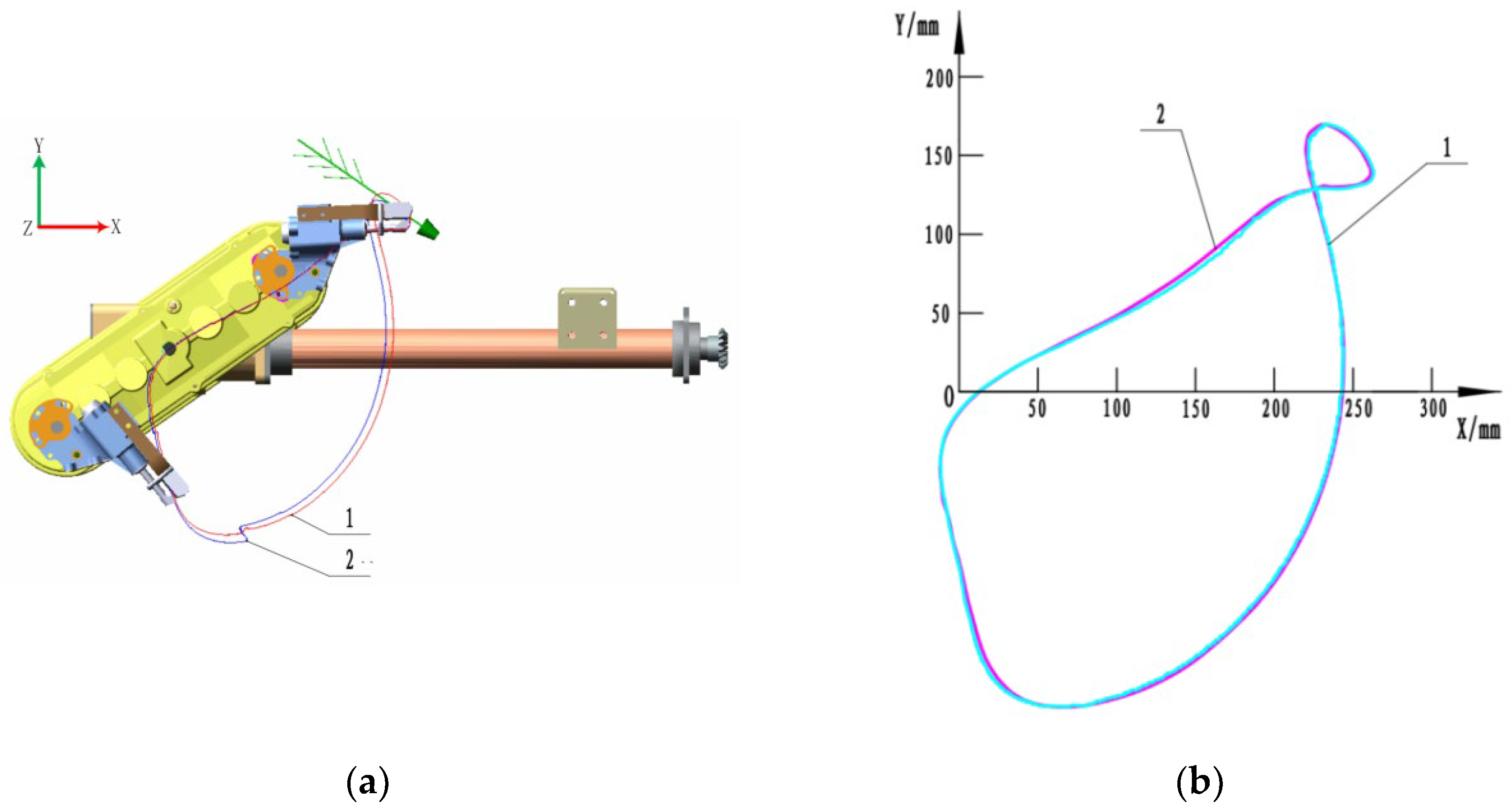
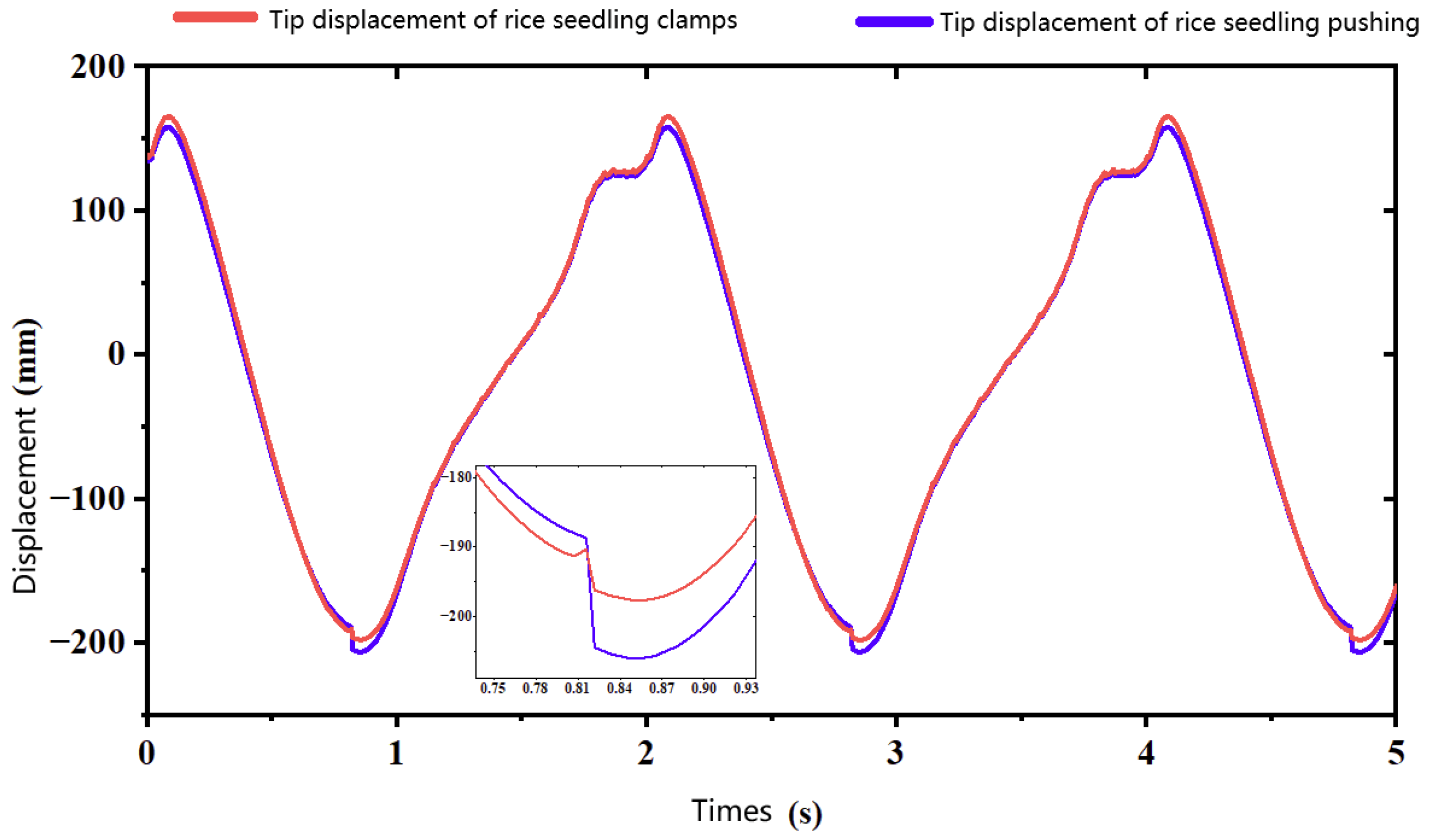
2.3. Kinematic Analysis
2.4. Parameter Optimization
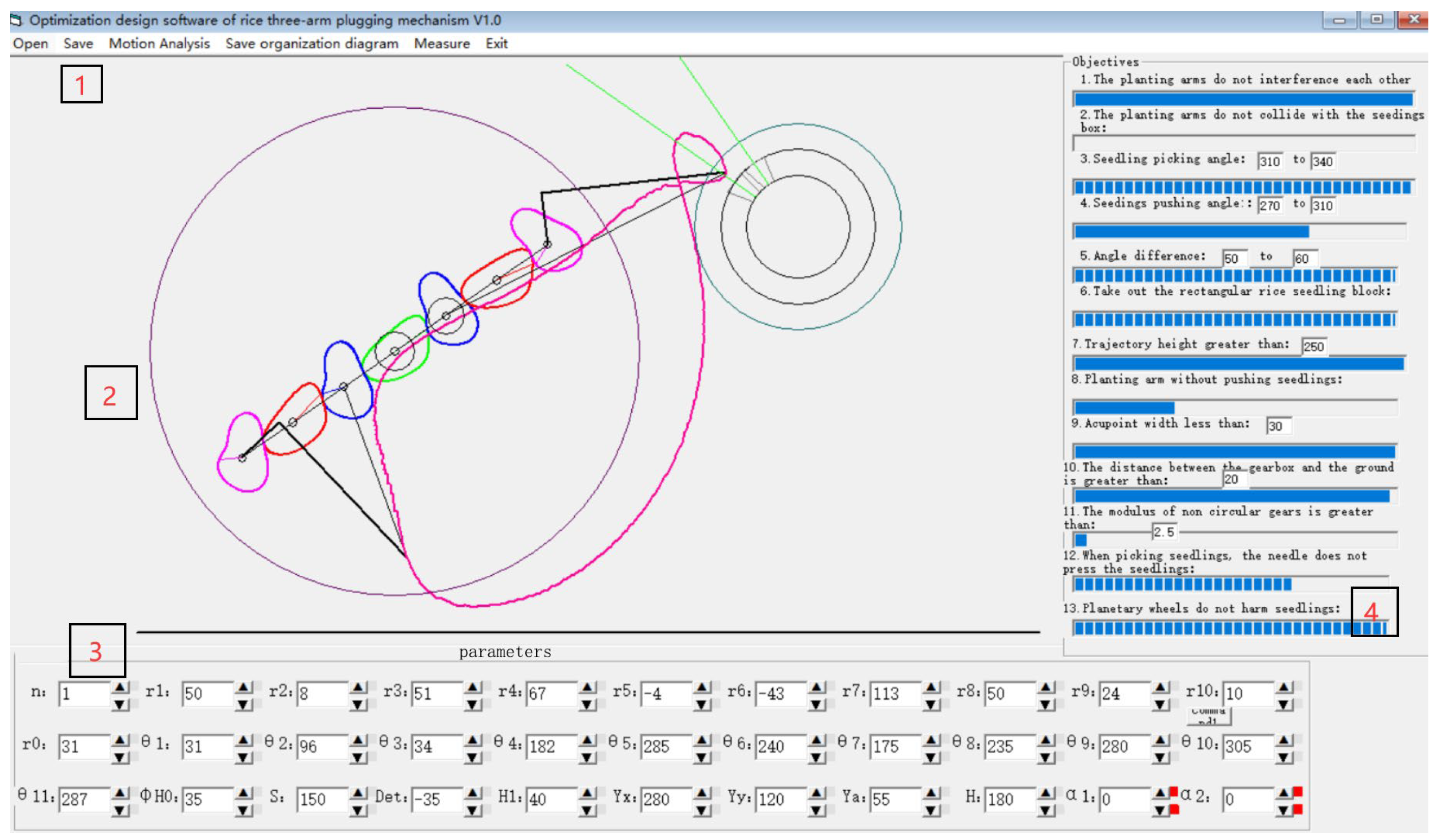
2.4.1. Compilation of Optimization Software
2.4.2. Determination of Optimization Goals
2.4.3. Parameter Determination
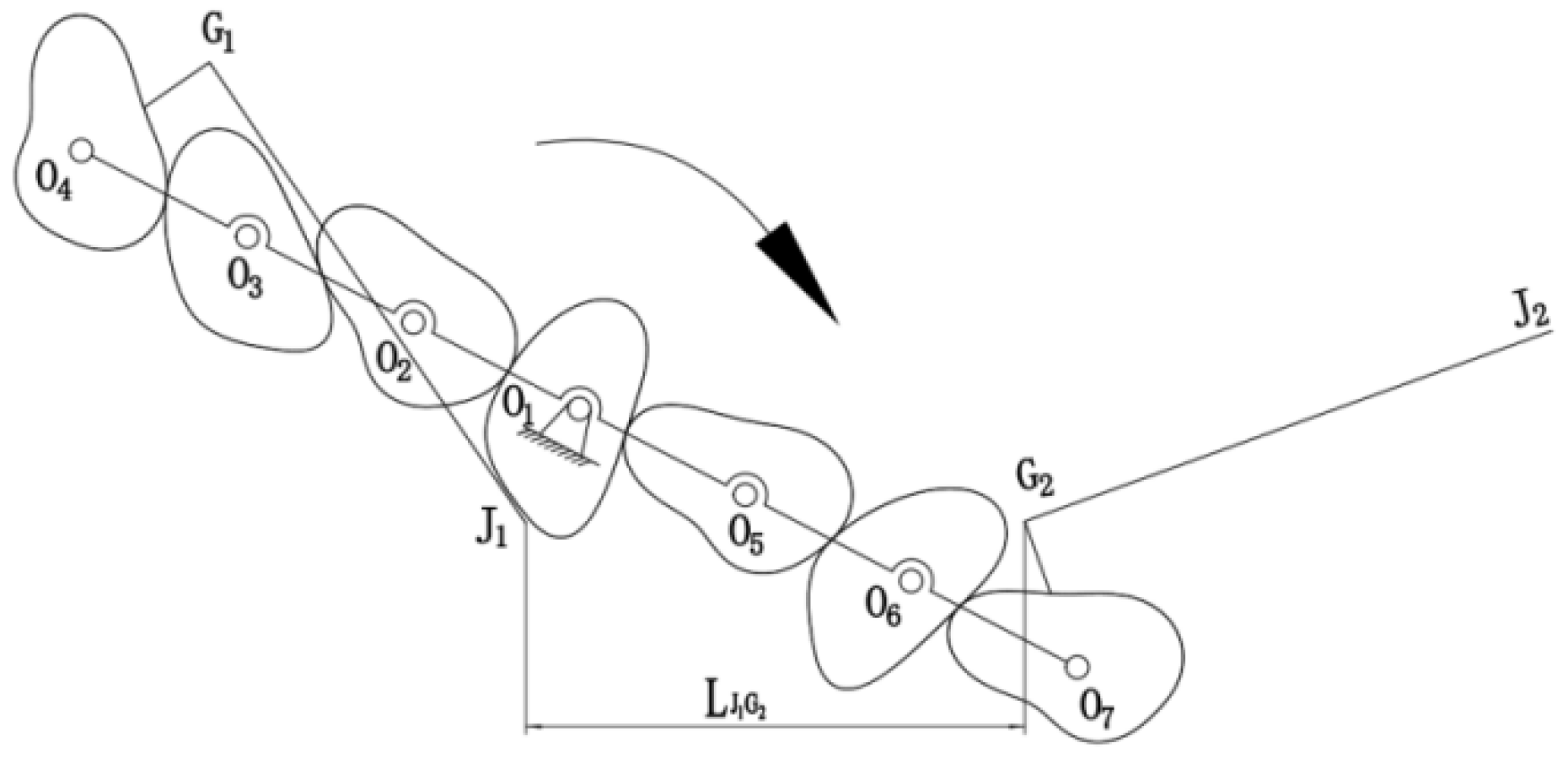
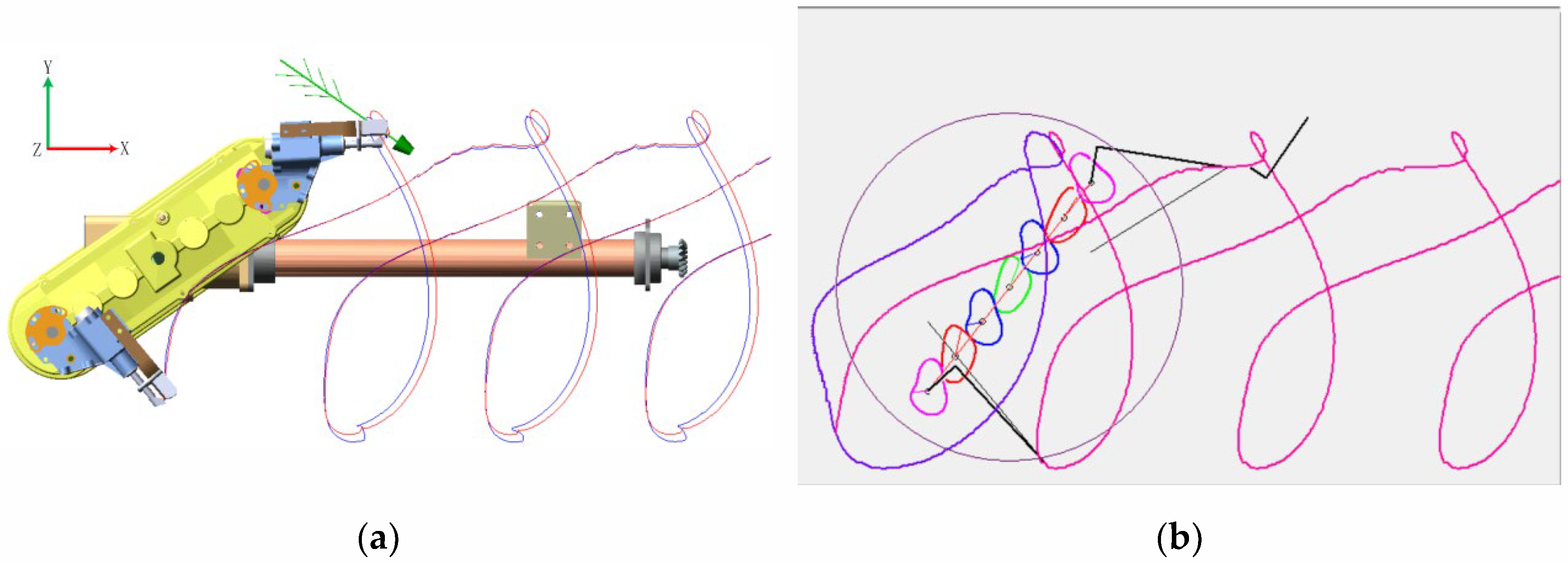
2.5. Introduction of Relative Motion Trajectory
3. Results and Discussion
3.1. Experimental Research
Virtual Test
3.2. Trajectory and Attitude Verification Test
3.2.1. Development of Test Bench
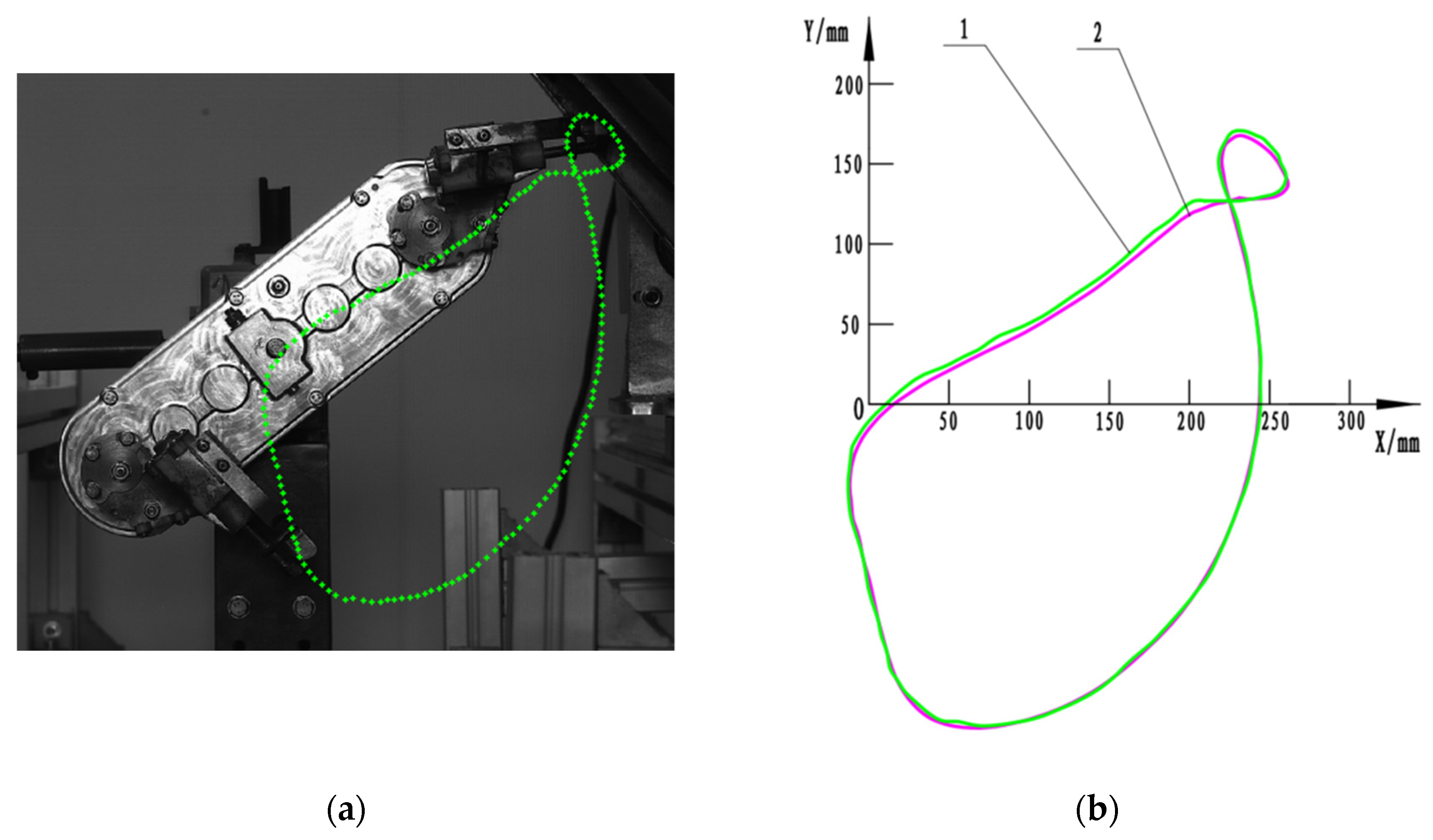
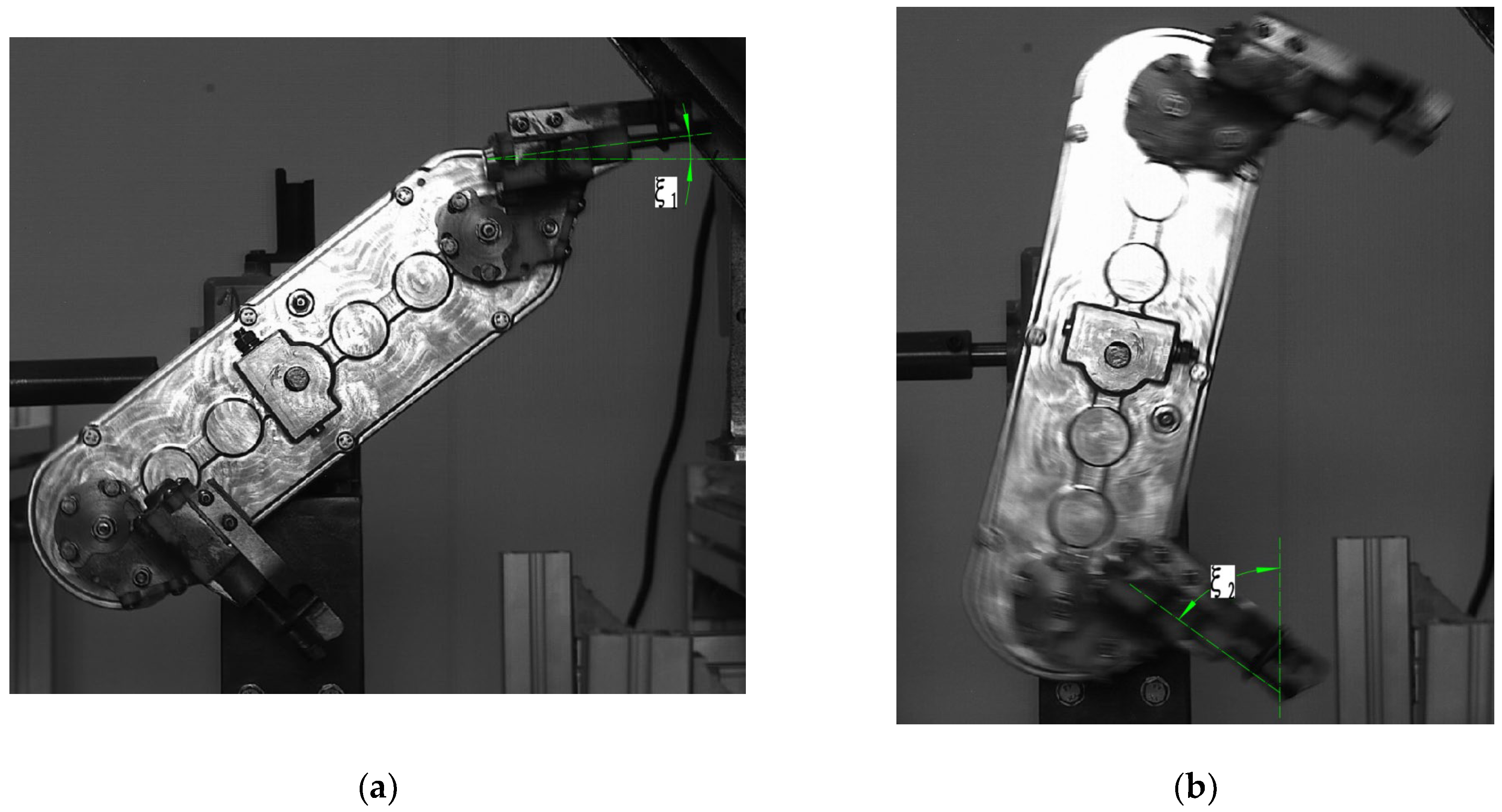
3.2.2. High-Speed Camera Test
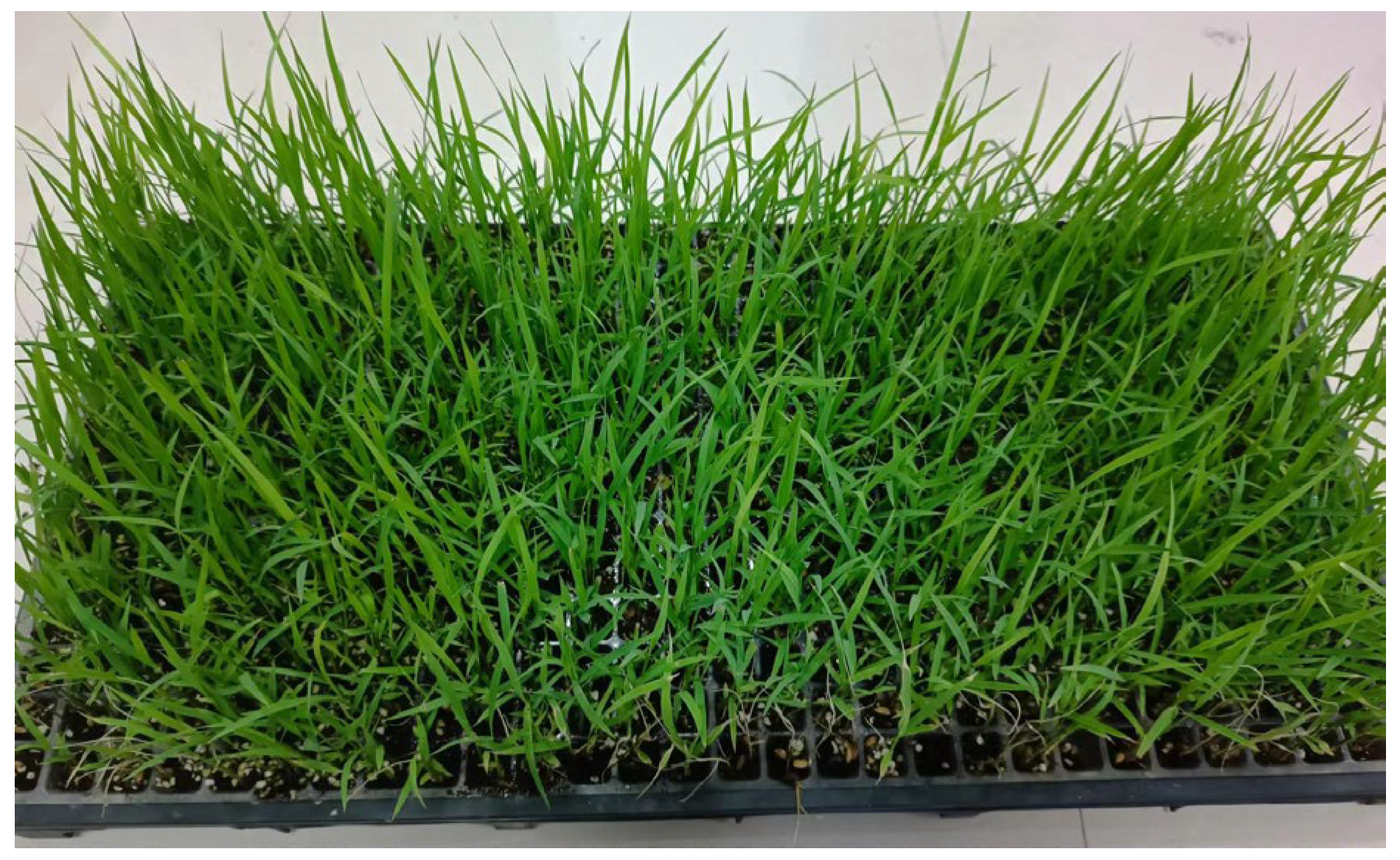
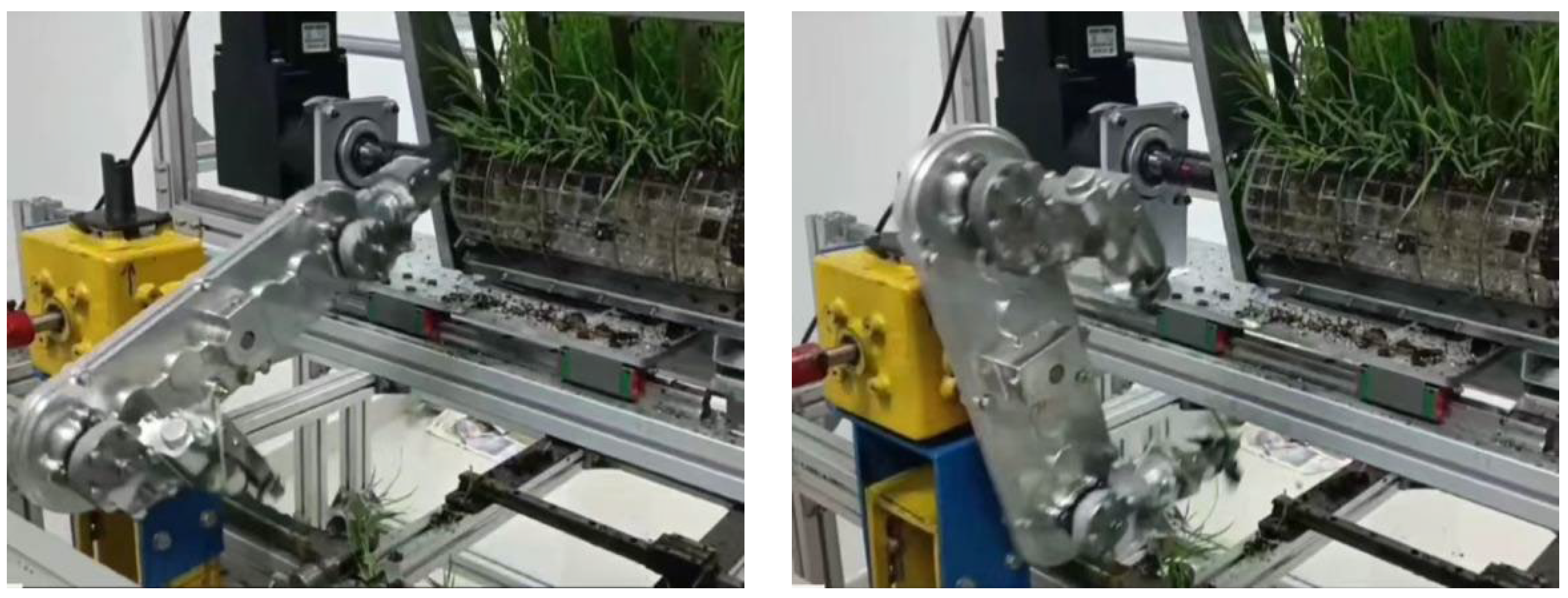
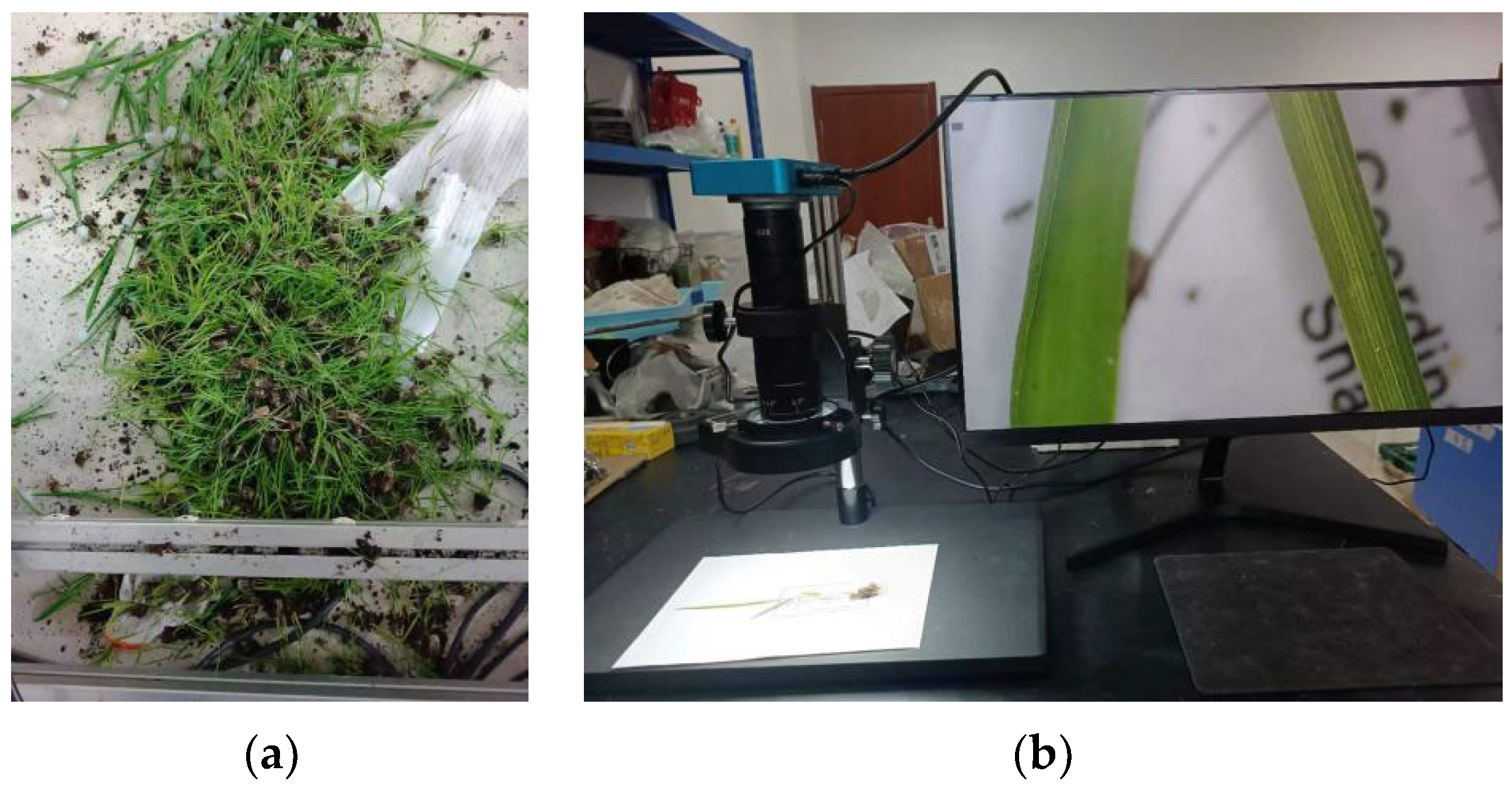
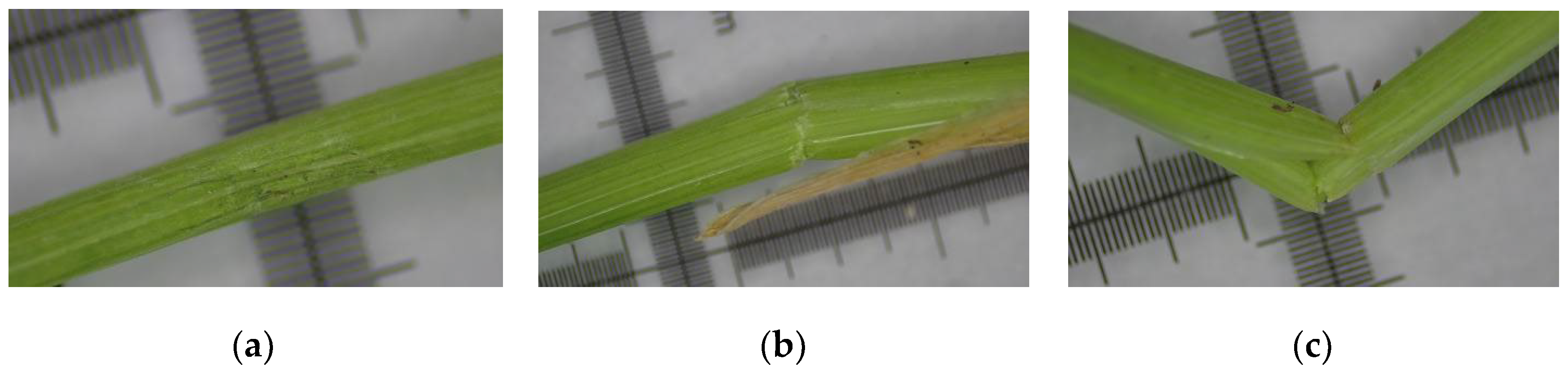
3.3. Seedling Test
4. Conclusions
- A differential-speed rotary super rice pot seedling transplanting mechanism (PSTM) was proposed, and through the utilization of bespoke super rice PSTM optimization design software, a set of mechanism parameters was optimized to align the transplanting arm with the super rice PSTM. This trajectory and posture required for pot seedling transplantation is significantly beneficial for the mechanized transplanting of super rice pot seedlings.
- Based on the kinematics model of the differential-speed rotary super rice PSTM, the optimization design software was developed, and a set of mechanism parameters that satisfied the super rice pot seedling transplanting requirements was optimized. Using high-speed camera technology, the trajectory and posture of the transplanting mechanism were verified. This validation illustrates the correctness of the theoretical analysis and design method of the transplanting mechanism.
- A rice PSTM test bench was developed, and the seedling picking test was successfully conducted. The test indicated that when the transplanting efficiency is 200 plants/min, the seedling extraction success rate is 97%, and the seedling injury rate is 1.8%. This seedling picking performance complies with the quality and technical specifications of rice pot seedling planting machines and has practical application value.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tang, L.; Xu, Z.; Chen, W. Advances and prospects of super rice breeding in China. J. Integr. Agric. 2017, 16, 984–991. [Google Scholar] [CrossRef]
- Liang, B.; Zhao, Y.; Zhao, J.; Zhu, K. Design and test of rice direct seeder. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2012, 43 (Suppl. S1), 63–66. [Google Scholar] [CrossRef]
- Xin, L.; Lv, Z.; Wang, W.; Zhou, M.; Zhao, Y. Optimal design and development of a double-crank potted rice seedling transplanting mechanism. Trans. ASABE 2017, 60, 31–40. [Google Scholar] [CrossRef]
- Li, Z.; Ma, X.; Li, X.; Chen, L.; Li, H.; Yuan, Z. Research Progress of Rice Transplanting Mechanization. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2018, 49, 1–20. [Google Scholar] [CrossRef]
- Yin, J.; Wang, Z.; Zhou, M.; Wu, L.; Zhang, Y. Optimized design and experiment of the three-arm transplanting mechanism for rice potted seedlings. Int. J. Agric. Biol. Eng. 2021, 14, 56–62. [Google Scholar] [CrossRef]
- Sun, L.; Chen, X.; Wu, C.; Zhang, G.; Xu, Y. Synthesis and design of rice pot seedling transplanting mechanism based on labeled graph theory. Comput. Electron. Agric. 2017, 143, 249–261. [Google Scholar] [CrossRef]
- Yu, G.; Jin, Y.; Chang, S.; Ye, B.; Gu, J.; Zhao, X. Design and Test of Clipping-plug Type Transplanting Mechanism of Rice Plug-seedling. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2019, 50, 100–108. [Google Scholar] [CrossRef]
- Zhang, H.; Zhu, C.; Huo, Z.; Xu, K.; Jiang, X.; Chen, H.; Gao, S.; Li, D.; Zhao, C.; Dai, Q.; et al. Advantages of yield formation and main characteristics of physiological and ecological in rice with nutrition bowl mechanical transplanting. Nongye Gongcheng Xuebao/Trans. Chin. Soc. Agric. Eng. 2013, 29, 50–59. [Google Scholar] [CrossRef]
- Choi, W.C.; Kim, D.C.; Ryu, I.H.; Kim, K.U. Development of a seedling pick–up device for vegetable transplanters. Trans. ASAE 2002, 45, 13–19. [Google Scholar] [CrossRef]
- Ye, B.L.; Yi, W.M.; Yu, G.H.; Gao, Y.; Zhao, X. Optimization design and test of rice plug seedling transplanting mechanism of planetary gear train with incomplete eccentric circular gear and non-circular gears. Int. J. Agric. Biol. Eng. 2017, 10, 43–55. [Google Scholar] [CrossRef]
- Wu, G.; Yu, G.; Zhou, H.; Ge, Y.; Ye, A.; Wang, L. Reverse Design and Tests of Three-arms Rotary Rice Seedling Transplanting Mechanism. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2022, 53, 84–91+149. [Google Scholar] [CrossRef]
- Yu, G.; Huang, X.; Ye, B.; Hu, H.; Yu, T. Principle analysis and parameters optimization of rotary rice pot seedling transplanting mechanism. Nongye Gongcheng Xuebao/Trans. Chin. Soc. Agric. Eng. 2013, 29, 16–22. [Google Scholar]
- Cai, J.; Liu, M.; Xiao, L.; Lin, J.; Ye, Y.; Yang, H. Design and Experiment of Transplanting Device with Variable Row-spacing of Rice Potted-seedling Transplanter. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2020, 51, 50–59. [Google Scholar] [CrossRef]
- Wang, L.; Sun, L.; Xu, Y.; Yu, G.; Zhang, W.; Zheng, J. Design Method of Transplanting Mechanism of Planetary Gear Train Based on Spatial Trajectory. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2021, 52, 51–59. [Google Scholar] [CrossRef]
- Ji, J.; Chen, K.; Jin, X.; Wang, Z.; Dai, B.; Fan, J.; Lin, X. High-efficiency modal analysis and deformation prediction of rice transplanter based on effective independent method. Comput. Electron. Agric. 2020, 168, 105126. [Google Scholar] [CrossRef]
- Sun, L.; Mao, S.; Zhao, Y.; Liu, X.; Zhang, G.; Du, X. Kinematic analysis of rotary transplanting mechanism for wide-narrow row pot seedlings. Trans. ASABE 2016, 59, 475–485. [Google Scholar] [CrossRef]
- Zhou, M.; Sun, L.; Du, X.; Zhao, Y.; Xin, L. Optimal design and experiment of rice pot seedling transplanting mechanism with planetary Bezier gears. Trans. ASABE 2014, 57, 1537–1548. [Google Scholar] [CrossRef]
- Zha, Y.; Lv, X.; Liu, X.; Ma, F. Fusion Estimation of Vehicle State Parameters Based on Dichotomy. Qiche Gongcheng/Automot. Eng. 2022, 44, 1910–1918+1935. [Google Scholar] [CrossRef]
- Ye, B.; Jin, X.; Yu, G.; Li, L.; Gao, Y.; Zhu, H. Parameter modification guiding optimization design and tests of a rotary transplanting mechanism for Rice Plug seedlings. Appl. Eng. Agric. 2015, 31, 863–873. [Google Scholar] [CrossRef]
- Zhao, Y.; Du, X. Parameter-guided optimization algorithm and its application in designing a rice transplanting mechanism. In Proceedings of the American Society of Agricultural and Biological Engineers Annual International Meeting, Kansas City, MO, USA, 21–24 July 2013. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Parameters | Parameter Value/mm | Input Parameters | Parameter Value/° |
|---|---|---|---|
| r1 | 50 | θ1 | 31 |
| r2 | 8 | θ2 | 96 |
| r3 | 51 | θ3 | 34 |
| r4 | 67 | θ4 | 182 |
| r5 | −4 | θ5 | 285 |
| r6 | −43 | θ6 | 240 |
| r7 | 113 | θ7 | 175 |
| r8 | 50 | θ8 | 235 |
| r9 | 24 | θ9 | 280 |
| r10 | 10 | θ10 | 305 |
| r11 | 31 | θ11 | 287 |
| S | 150 | δ0 | −35 |
| H1 | 40 | φH0 | 35 |
| Seedling Picking Angle () | Seedling Pushing Angle () | Angle Difference () | |
|---|---|---|---|
| Design Requirements | −5–10° | 45–70° | 50–60° |
| Theoretical Design | 8° | 62° | 54° |
| Physical Prototype | 6.62° | 59.32° | 52.7° |
| Rotating Speed/rpm | Number of Seedlings in Seedling Tray/Plant | The Number of Seedlings Taken out/Plant | Seedling Success Rate/% | Injury Rate/% |
|---|---|---|---|---|
| 90 | 812 | 780 | 96 | 1.5% |
| 100 | 812 | 788 | 97 | 1.8% |
| 110 | 812 | 756 | 93 | 2.2% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, M.; Wei, Z.; Wang, Z.; Sun, H.; Wang, G.; Yin, J. Design and Experimental Investigation of a Transplanting Mechanism for Super Rice Pot Seedlings. Agriculture 2023, 13, 1920. https://doi.org/10.3390/agriculture13101920
Zhou M, Wei Z, Wang Z, Sun H, Wang G, Yin J. Design and Experimental Investigation of a Transplanting Mechanism for Super Rice Pot Seedlings. Agriculture. 2023; 13(10):1920. https://doi.org/10.3390/agriculture13101920
Chicago/Turabian StyleZhou, Maile, Zhaoxiang Wei, Zeliang Wang, Hao Sun, Guibin Wang, and Jianjun Yin. 2023. "Design and Experimental Investigation of a Transplanting Mechanism for Super Rice Pot Seedlings" Agriculture 13, no. 10: 1920. https://doi.org/10.3390/agriculture13101920
APA StyleZhou, M., Wei, Z., Wang, Z., Sun, H., Wang, G., & Yin, J. (2023). Design and Experimental Investigation of a Transplanting Mechanism for Super Rice Pot Seedlings. Agriculture, 13(10), 1920. https://doi.org/10.3390/agriculture13101920