

Development of Boom Posture Adjustment and Control System for Wide Spray Boom

Abstract
:1. Introduction
2. Materials and Methods
2.1. Total Configuration of Active Trapezoid Suspension
2.2. Design of a Hydraulic System
2.3. Hardware Circuit of the Boom Control System
2.4. Processing Method for Sensor Data
2.4.1. Moving Average Filter
2.4.2. Moving Median Filtering
2.4.3. Limiting Filtering
2.5. Design of a Second-Order Low-Pass Filter Circuit for PWM Output
2.6. Experimental Design
2.6.1. Development of a Laboratory Test Bench
2.6.2. Field Experiments
3. Development of a Mathematical Model
3.1. Analysis and Optimization of Boom-Passive Suspension Characteristics
3.1.1. Dynamic Model of an Active Balance System
- (1)
- The boom suspension is a truss structure. The lubrication of the joints is good, and the friction can be ignored.
- (2)
- The connections among the trusses are rigid, which is regarded as a rigid body, and the elastic deformations of all the trusses, which are in the vertical direction, are ignored.
- (3)
- Neglecting the mass of the connecting parts of the truss.
- (4)
- The inclination angle of the vehicle body is equivalent to the ground angle, and the error between the two angles is ignored.
3.1.2. Dynamic Model of Ground Following Suspension
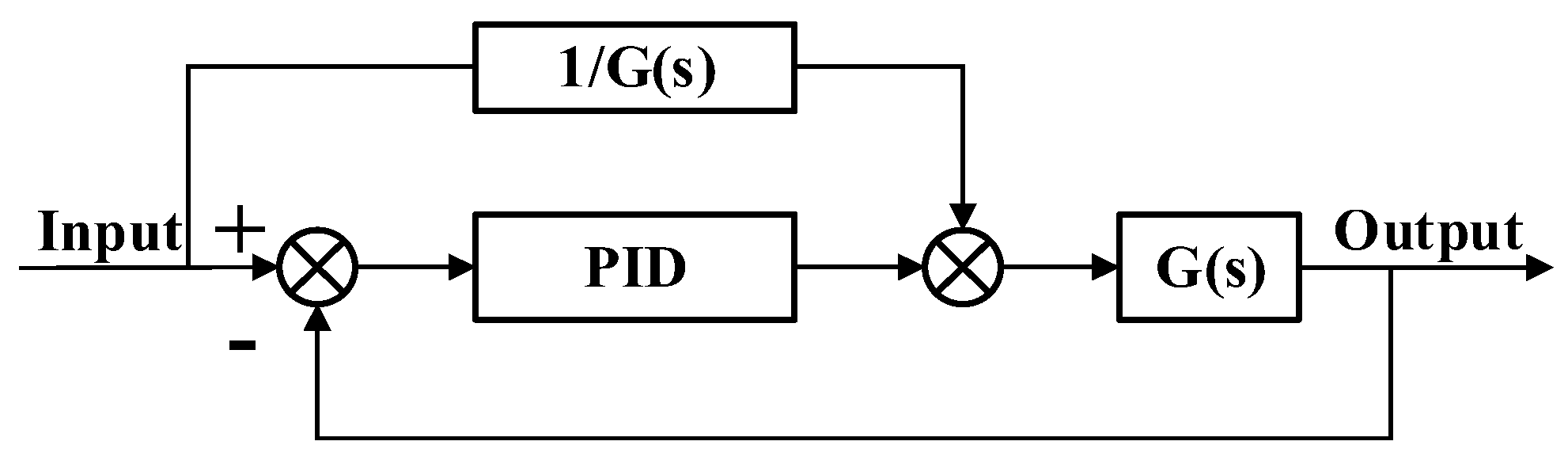
3.1.3. Control Algorithm
4. Results and Discussion
4.1. Simulation and Experiment
4.1.1. Expected Response Characteristics of a Passive Suspension
4.1.2. Step Response Analysis
4.1.3. Frequency Domain Response Analysis of Passive Suspension
4.1.4. Ground-Following Dynamics Simulation
4.1.5. Evaluation of Response Times of the Developed Hydraulic System
4.2. Experiments and Results
4.2.1. Testing of the Active Balance Control System
4.2.2. Testing of the Ground Following the Control System
4.2.3. Testing of the Ground Following the Control System for Challenging Terrain
4.2.4. Field Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. Mathematic Model of Valve-Controlled Hydraulic Cylinder
Appendix A.2. Dynamic Model of an Active Balance System
References
- Zhuang, T.F.; Yang, X.J.; Dong, X.; Zhang, T.; Yan, H.R.; Sun, X. Research status and development trend of large self-propelled sprayer booms. Trans. Chin. Soc. Agric. Mach. 2018, 49, 189–198. (In Chinese) [Google Scholar]
- Visacki, V.; Sedlar, A.; Gil, E.; Bugarin, R.; Turan, J.; Janic, T.; Burg, P. Effects of sprayer boom height and operating pressure on the spray uniformity and distribution model development. Appl. Eng. Agric. 2016, 32, 341–346. [Google Scholar]
- Balsari, P.; Gil, E.; Marucco, P.; van de Zande, J.C.; Nuyttens, D.; Herbst, A.; Gallart, M. Field-crop-sprayer potential drift measured using test bench: Effects of boom height and nozzle type. Biosyst. Eng. 2017, 154, 3–13. [Google Scholar] [CrossRef]
- Cui, L.F.; Xue, X.Y.; Le, F.X.; Mao, H.P.; Ding, S.M. Design and experiment of electro-hydraulic active suspension for controlling the rolling motion of spray boom. Int. J. Agric. Biol. Eng. 2019, 12, 72–81. [Google Scholar] [CrossRef]
- Yan, J.C.; Xue, X.Y.; Cui, L.F.; Ding, S.M.; Gu, W.; Le, F.X. Analysis of dynamic behavior of spray boom under step excitation. Appl. Sci. 2021, 11, 14–24. [Google Scholar] [CrossRef]
- Sun, W.F.; He, Y.; Fu, T.P.; Wang, J.; Lu, J.Q.; Chang, J.K. Design and test of horizontal folding spray boom of sprayer. Trans. Chin. Soc. Agric. Mach. 2021, 53, 116–127. [Google Scholar]
- Manea, D.; Gidea, M.; Marin, E.; Mateescu, M. Simulation of mechanical parameters of sprayer boom. In Proceedings of the 17th International Scientific Conference on Engineering for Rural Development, Jelgava, Latvia, 23–25 May 2018; pp. 45–51. [Google Scholar]
- Lebeau, F.; El Bahir, L.; Destain, M.F.; Kinnaert, M.; Hanus, R. Improvement of spray deposit homogeneity using a PWM spray controller to compensate horizontal boom speed variations. Comput. Electron. Agric. 2004, 43, 149–161. [Google Scholar] [CrossRef]
- Satow, T.; Miyamoto, K.; Matsuda, K. Control of spraying height with ultrasonic sensor for boom sprayer (part 2)-Development of automatic control device for spraying height. J. Jpn. Soc. Agric. Mach. 1994, 56, 59–67. [Google Scholar]
- Anthonis, J.; Ramon, H.; Baerdemaeker, J.D. Implementation of an active horizontal suspension on a spray boom. Trans. ASAE 2000, 43, 213–220. [Google Scholar] [CrossRef]
- Deprez, K.; Anthonis, J.; Roman, H.; Van Brussel, H. Development of a slow active suspension for stabilizing the roll of spray booms, part 1: Hybrid Modelling. Biosyst. Eng. 2002, 81, 185–191. [Google Scholar] [CrossRef]
- Nuyttens, D.; Zwertvaegher, I.K.; Dekeyser, D. Spray drift assessment of different application techniques using a drift test bench an comparison with other assessment methods. Biosyst. Eng. 2016, 154, 14–24. [Google Scholar] [CrossRef]
- Cui, L.F.; Xue, X.Y.; Ding, S.M.; Le, F.X. Development of a DSP-based electronic control system for the active spray boom suspension. Comput. Electron. Agric. 2019, 166, 105024. [Google Scholar] [CrossRef]
- Tan, H.R.; Dou, H.J.; Zhai, C.Y.; Li, Y.K.; Yang, S.; Chen, L.P. Design and test of boom height control system for boom sprayer. J. Agric. Mech. Res. 2021, 6, 156–160. [Google Scholar]
- Dou, H.J.; Zhai, C.Y.; Chen, L.P.; Wang, S.L.; Wang, X. Field variation characteristics of sprayer boom height using a newly designed boom height detection system. IEEE Access 2021, 9, 17148–17160. [Google Scholar] [CrossRef]
- Tahmasebi, M.; Mailah, M.; Gohari, M.; Abd Rahman, R. Vibration suppression of sprayer boom structure using active torque control and iterative learning. Part I: Modelling and control via simulation. J. Vib. Control 2018, 24, 4689–4699. [Google Scholar] [CrossRef]
- Andrea, W.; Miklos, K. State feedback controller design of an active suspension system for vehicles using pole placement techenique. Acta Tech. Jaurinensis 2019, 12, 178–190. [Google Scholar]
- Xue, T.; Li, W.; Du, Y.F.; Mao, E.R.; Wen, H.J. Adaptive fuzzy sliding mode control of spray boom active suspension for large high clearance sprayer. Trans. CSAE 2018, 34, 47–56. (In Chinese) [Google Scholar]
- Anthonis, J.; Ramon, H. Design of an active suspension to suppress the horizontal vibrations of a spray boom. J. Sound Vib. 2003, 266, 573–583. [Google Scholar] [CrossRef]
- Available online: https://amazone.co.uk/ (accessed on 8 November 2023).
- Available online: https://lemken.com/en-en/# (accessed on 6 November 2023).






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Mode | |||
|---|---|---|---|
| , | |||
| , | |||
| Active balance and ground following | , | , |
| Sign | Parameter Signature | Parameter Value | Unit |
|---|---|---|---|
| Length of boom gravity to MN | 0.198 | m | |
| Length of boom gravity to BC | 0.200 | m | |
| Initial length of left active balance hydraulic cylinder | 0.520 | m | |
| Initial length of right active balance hydraulic cylinder | 0.520 | m | |
| Length of MN | 1.420 | m | |
| Length of EF | 1.344 | m | |
| Moment of inertia of boom about mass center | 1.488 × 104 | kg·m2 | |
| Mass of boom | 535 | kg | |
| Initial angle between AB/DC and vertical direction | 1.05–0.52 | rad | |
| Length shown in Figure 4 | 2.00 | m | |
| Length of AB | 0.37 | m | |
| Length of CD | 0.37 | m | |
| Length of AD | 0.48 | m | |
| Length of BC | 0.80 | m |
| Indexes | |||
|---|---|---|---|
| 0.12 | 0.043 | 0.039 | |
| 0.03 | 0.012 | 0.009 |
| Indexes | |||
|---|---|---|---|
| 3.896 | 0.984 | 0.826 | |
| 0.453 | 0.130 | 0.117 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Nie, Z.; Chen, Y.; Ge, D.; Li, M. Development of Boom Posture Adjustment and Control System for Wide Spray Boom. Agriculture 2023, 13, 2162. https://doi.org/10.3390/agriculture13112162
Li J, Nie Z, Chen Y, Ge D, Li M. Development of Boom Posture Adjustment and Control System for Wide Spray Boom. Agriculture. 2023; 13(11):2162. https://doi.org/10.3390/agriculture13112162
Chicago/Turabian StyleLi, Jinyang, Zhenyu Nie, Yunfei Chen, Deqiang Ge, and Meiqing Li. 2023. "Development of Boom Posture Adjustment and Control System for Wide Spray Boom" Agriculture 13, no. 11: 2162. https://doi.org/10.3390/agriculture13112162
APA StyleLi, J., Nie, Z., Chen, Y., Ge, D., & Li, M. (2023). Development of Boom Posture Adjustment and Control System for Wide Spray Boom. Agriculture, 13(11), 2162. https://doi.org/10.3390/agriculture13112162