


A Real-Time Shrimp with and without Shells Recognition Method for Automatic Peeling Machines Based on Tactile Perception


Abstract
:1. Introduction
- (1)
- This is an attempt to identify shrimp with and without shells using a tactile method to address the problem of the non-universality of existing recognition methods because of the large number of shrimp species.
- (2)
- A physically meaningful ENSV-ARBM tactile signal processing scheme is proposed to amplify the tactile differences between shrimp with and without shells and reduce the effect of uncertainty in the recognition of shrimp with and without shell samples.
- (3)
- The proposed method can meet the requirements of automatic peeling machines for accurate recognition of different species of shrimp in real time, which helps to improve the efficiency of automatic peeling machines and reduce the labor cost.
2. Materials and Methods
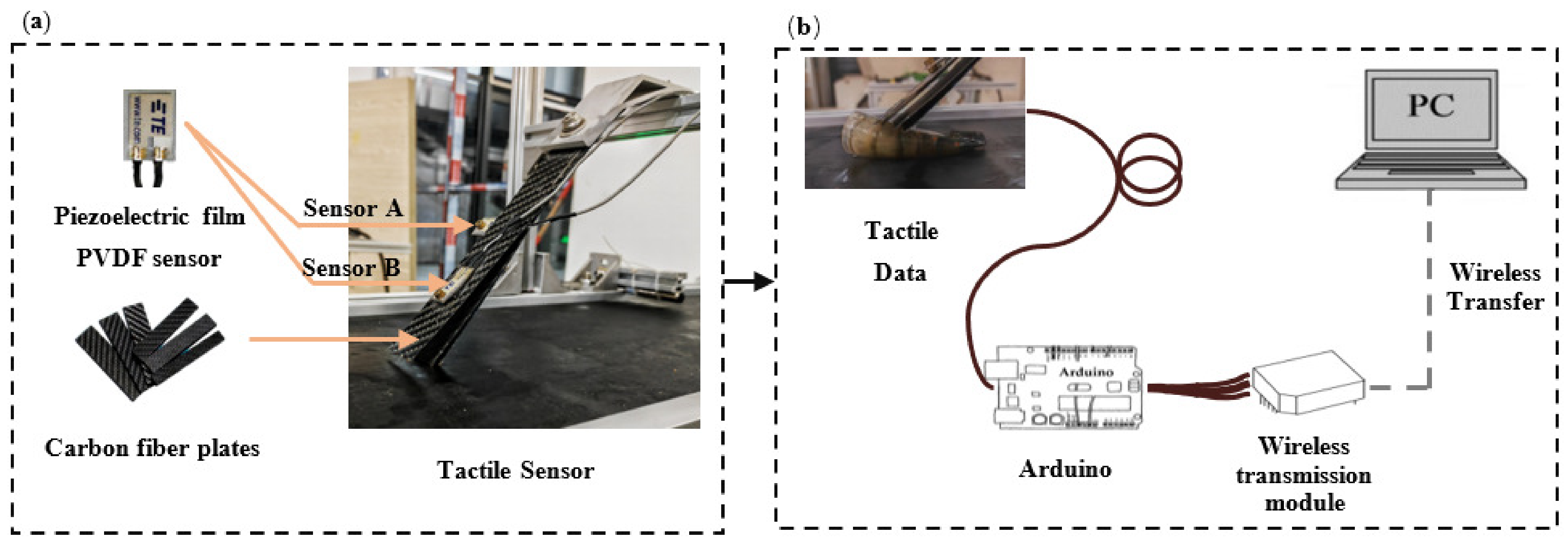
2.1. Experimental Setup
2.2. Data Processing
2.2.1. Tactile Signal Acquisition and Preprocessing
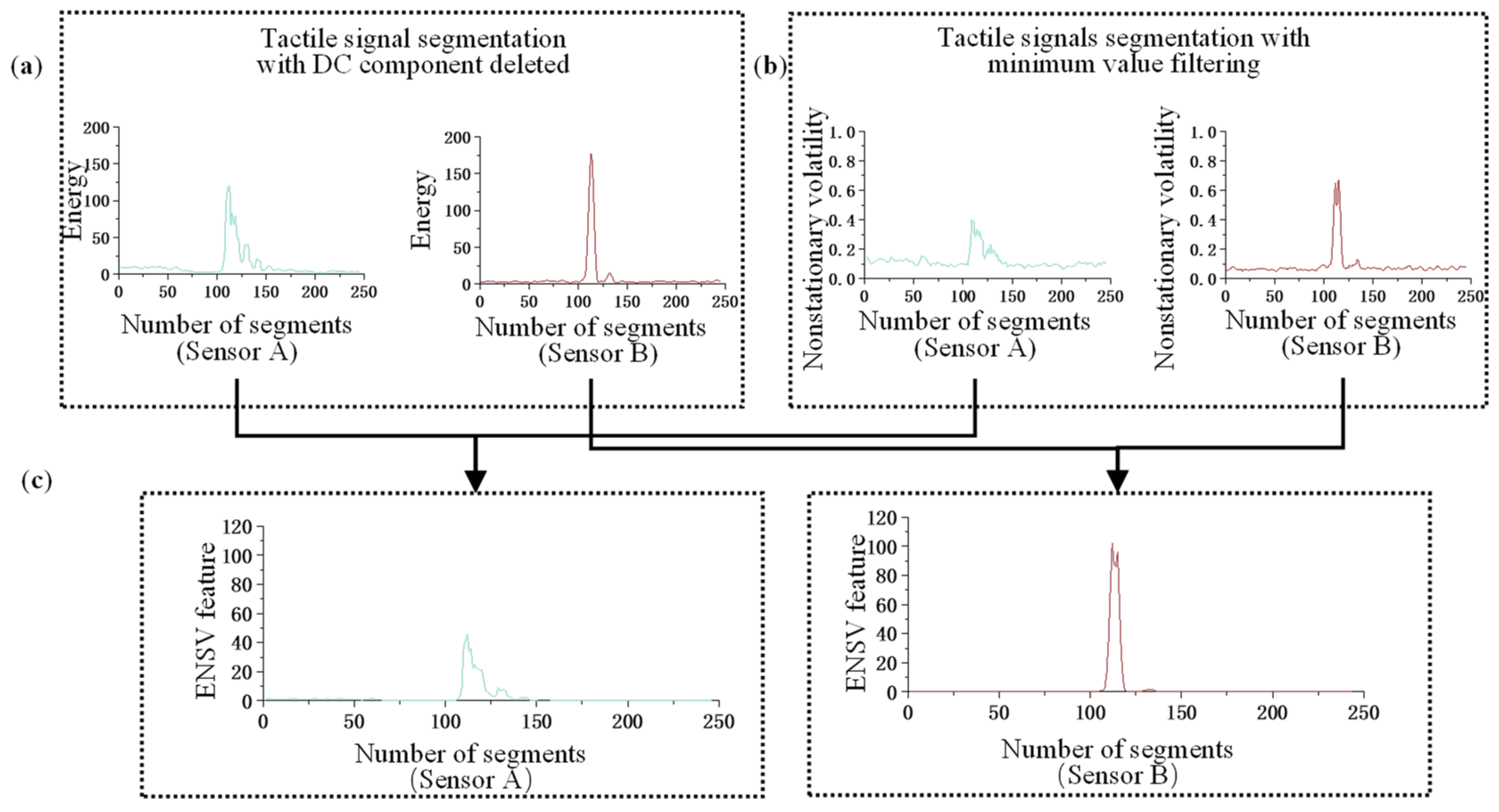
2.2.2. ENSV Features Extraction
2.2.3. ARBM Construction
Pretraining
Boundary Training
3. Results and Discussion
3.1. Compare Different Tactile Recognition Models
3.2. Compare Different Vision Recognition Models
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chang, Z.Q.; Neori, A.; He, Y.Y.; Li, J.T.; Qiao, L.; Preston, S.I.; Liu, P.; Li, J. Development and current state of seawater shrimp farming, with an emphasis on integrated multi-trophic pond aquaculture farms, in China—A review. Rev. Aquac. 2020, 12, 2544–2558. [Google Scholar] [CrossRef]
- Zhao, L.T.; Xi, M.J.; Wang, W.; Chu, X.; Zhao, X.; Yuan, Y.; Liu, S.Q. A review of technology development process of a typical shrimp peeling machine. J. Adv. Mech. Des. Syst. Manuf. 2015, 9, JAMDSM0013. [Google Scholar] [CrossRef]
- Zhang, X.H.; Zhao, Q.L.; Zhao, Y.D.; Wang, Z.H.; Yi, J.G. Parameter and pretreatment condition optimization of dual rollers extrusion peeling device for Litopenaeus vannamei. Editor. Off. Trans. Chin. Soc. Agric. Eng. 2014, 30, 308–314. [Google Scholar] [CrossRef]
- Yi, J.G.; Ma, J.Y.; Wang, Z.H.; Zhang, X.H.; Yang, S.H. Status and Development of Shrimp Processing Equipment. Mod. Agric. Equip. 2020, 41, 2–11. [Google Scholar]
- Zhang, X.H.; Zhao, Q.L.; Wang, Z.H.; Yi, J.G.; Wang, J. Parameter optimization experiment of adjustable five rollers shrimp peeling machine. Trans. Chin. Soc. Agric. Eng. 2016, 32, 247–254. [Google Scholar]
- Hosseinpour, S.; Rafiee, S.; Mohtasebi, S.S.; Aghbashlo, M. Application of computer vision technique for on-line monitoring of shrimp color changes during drying. J. Food Eng. 2013, 115, 99–114. [Google Scholar] [CrossRef]
- Hong, H.M.; Yang, X.L.; You, Z.H.; Cheng, F. Visual quality detection of aquatic products using machine vision. Aquac. Eng. 2014, 63, 62–71. [Google Scholar] [CrossRef]
- Hong, C.; Liu, Z.H.; Wang, X.Q.; Gao, L.; Zheng, Z.Y.; Xu, Z.L.; Jun, Z. Construction of completeness recognition method for shrimp (Litopenaeus vannamei) based on morphological characteristics. J. Food Saf. Qual. 2021, 2, 8666–8673. [Google Scholar]
- Hu, W.C.; Yang, C.Y.; Huang, D.Y. Robust real-time ship detection and tracking for visual surveillance of cage aquaculture. J. Vis. Commun. Image Represent. 2011, 22, 543–556. [Google Scholar] [CrossRef]
- Lee, D.J.; Xiong, G.M.; Lane, R.M.; Zhang, D. An Efficient Shape Analysis Method for Shrimp Quality Evaluation, 2012 12th International Conference on Control, Automation. In Proceedings of the 2012 12th International Conference on Control Automation Robotics & Vision (ICARCV), Guangzhou, China, 5–7 December 2012; pp. 865–870. [Google Scholar]
- Zhang, D.; Lillywhite, K.D.; Lee, D.J.; Tippetts, B.J. Automatic shrimp shape grading using evolution constructed features. Comput. Electron. Agric. 2014, 100, 116–122. [Google Scholar] [CrossRef]
- Liu, Z.H.; Jia, X.J.; Xu, X.S. Study of shrimp recognition methods using smart networks. Comput. Electron. Agric. 2019, 169, 104926. [Google Scholar] [CrossRef]
- Liu, Z.H. Soft-shell Shrimp Recognition Based on an Improved AlexNet for Quality Evaluations. J. Food Eng. 2020, 266, 109698. [Google Scholar] [CrossRef]
- Zhang, L.; Huang, L.; Li, B.B.; Chen, X.; Duan, Q.L. Fish School Counting Method Based on Multi-scale Fusion and No Anchor YOLO v3. Trans. Chin. Soc. Agric. Mach. 2021, 52, 237–244. [Google Scholar]
- Conrady, C.R.; Er, S.; Attwood, C.G.; Roberson, L.A.; Vos, L. Automated detection and classification of southern African Roman seabream using mask R-CNN. Ecol. Inform. 2022, 69, 101593. [Google Scholar] [CrossRef]
- Ramik, D.M.; Sabourin, C.; Moreno, R.; Madani, K. A machine learning based intelligent vision system for autonomous object detection and recognition. Appl. Intell. 2014, 40, 358–375. [Google Scholar] [CrossRef]
- Kiyokawa, T.; Tomochika, K.; Takamatsu, J.; Ogasawara, T. Fully Automated Annotation With Noise-Masked Visual Markers for Deep-Learning-Based Object Detection. IEEE Robot. Autom. Lett. 2019, 4, 1972–1977. [Google Scholar] [CrossRef]
- Chen, X.S.; Mao, Y.Y.; Ma, X.; Qi, L. A Tactile Method for Rice Plant Recognition Based on Machine Learning. Sensors 2020, 20, 5135. [Google Scholar] [CrossRef]
- Chen, X.S.; Mao, Y.Y.; Xiong, Y.S.; Qi, L.; Jiang, Y.; Ma, X. Intra-row weed density evaluation in rice field using tactile method. Comput. Electron. Agric. 2022, 193, 106699. [Google Scholar] [CrossRef]
- Iskarous, M.M.; Thakor, N.V. E-Skins: Biomimetic Sensing and Encoding for Upper Limb Prostheses. Proc. IEEE 2019, 107, 2052–2064. [Google Scholar] [CrossRef]
- Luo, S.; Mou, W.X.; Althoefer, K.; Liu, H.B. iCLAP: Shape recognition by combining proprioception and touch sensing. Auton. Robot. 2019, 43, 993–1004. [Google Scholar] [CrossRef]
- Niu, H.S.; Li, H.; Gao, S.; Li, Y.; Wei, X.; Chen, Y.K.; Yue, W.J.; Zhou, W.J.; Shen, G.Z. Perception-to-Cognition Tactile Sensing Based on Artificial-Intelligence-Motivated Human Full-Skin Bionic Electronic Skin. Adv. Mater. 2022, 34, 2202622. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.A.; Alessandro, A.; Perla, M.; Fulvio, M.; Giorgio, C. Fabric Classification Using a Finger-Shaped Tactile Sensor via Robotic Sliding. Front. Neurorobotics 2022, 16, 808222. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Zhou, J.; Yan, Z.; Wang, K.; Mao, J.; Jiang, Z. Hardness recognition of fruits and vegetables based on tactile array information of manipulator. Comput. Electron. Agric. 2021, 181, 105959. [Google Scholar] [CrossRef]
- Keser, S.; Hayber, S.E. Fiber optic tactile sensor for surface roughness recognition by machine learning algorithms. Sens. Actuators A-Phys. 2021, 332, 113071. [Google Scholar] [CrossRef]
- Qin, L.H.; Yi, Z.K.; Zhang, Y.L. Enhanced surface roughness discrimination with optimized features from bio-inspired tactile sensor. Sens. Actuators A-Phys. 2017, 264, 133–140. [Google Scholar] [CrossRef]
- Kawazoe, M.; Kosemura, Y.; Miki, N. Encoding and presentation of surface textures using a mechanotactile display. Sens. Actuators A-Phys. 2017, 261, 30–39. [Google Scholar] [CrossRef]
- Soualhi, M.; Nguyen, K.; Medjaher, K. Pattern recognition method of fault diagnostics based on a new health indicator for smart manufacturing. Mech. Syst. Signal Process. 2020, 142, 106680. [Google Scholar] [CrossRef]
- Bakker, T.; Wouters, H.; Asselt, K.; Bontsema, J.; Tang, L.; Müller, J.; Straten, G. A vision based row detection system for sugar beet. Comput. Electron. Agric. 2008, 60, 87–95. [Google Scholar] [CrossRef]
- Ruan, X.; Zhu, Y.; Li, J.; Cheng, Y. Predicting the citation counts of individual papers via a BP neural network. J. Informetr. 2020, 14, 101039. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material Type | Parameter | Structure Type | Parameter |
|---|---|---|---|
| Carbon fiber plates (Length/mm × Width/mm × Thick/mm) | 150 × 30 × 1 | Extended length of transverse piezoelectric film PVDF sensor/mm | 10 |
| Piezoelectric film PVDF sensor (Length/mm × Width/mm × Thick/mm) | 20 × 10 × 1 | Tilt angle of the sensor/° | 60 |
| Copper blocks (Bottom area/mm2 × Height/mm) | 2.25π × 3 | Carbon fiber plates offset distance/mm | 3 |
| REF | Methods | AT % | AS % | AP % |
|---|---|---|---|---|
| [23] | PCA-KNN | 74.0 | 77.3 | 70.7 |
| [24] | PCA-SVM | 72.7 | 66.7 | 78.7 |
| [25] | DWT-KNN | 72.7 | 73.3 | 72 |
| [26] | DWT-ELM | 77.4 | 78.7 | 76.0 |
| Our proposed model | ENSV-ARBM | 88.7 | 85.3 | 92.0 |
| ENSV-ARBM | PCA-KNN | PCA-SVM | DWT-KNN | DWT-ELM | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Indicators | AT % | AS % | AP % | AT % | AS % | AP % | AT % | AS % | AP % | AT % | AS % | AP % | AT % | AS % | AP % | |
| Species | ||||||||||||||||
| (a) | 89.5 | 89.0 | 90.0 | 73.5 | 77.0 | 70.0 | 73.0 | 69.0 | 77.0 | 74.0 | 74.0 | 74.0 | 78.5 | 79.0 | 78.0 | |
| (b) | 89.0 | 86.0 | 92.0 | 76.5 | 77.0 | 76.0 | 74.5 | 72.0 | 77.0 | 73.0 | 73.0 | 73.0 | 77.5 | 78.0 | 77.0 | |
| (c) | 88.0 | 87.0 | 89.0 | 76.5 | 78.0 | 75.0 | 71.0 | 67.0 | 75.0 | 72.0 | 73.0 | 71.0 | 79.0 | 79.0 | 79.0 | |
| (d) | 87.5 | 85.0 | 90.0 | 74.5 | 75.0 | 74.0 | 74.5 | 71.0 | 78.0 | 71.0 | 71.0 | 71.0 | 77.5 | 78.0 | 77.0 | |
| (e) | 87.0 | 88.0 | 86.0 | 75.5 | 75.0 | 76.0 | 72.5 | 70.0 | 75.0 | 71.5 | 72.0 | 71.0 | 77.0 | 77.0 | 77.0 | |
| Mean | 88.2 | 87.0 | 89.4 | 75.3 | 76.4 | 74.2 | 73.1 | 69.8 | 76.4 | 72.3 | 72.6 | 72.0 | 77.9 | 78.2 | 77.6 | |
| ENSV-ARBM | YOLOv3 | R-CNN | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Indicators | AT % | AS % | AP % | AT % | AS % | AP % | AT % | AS % | AP % | |
| Species | ||||||||||
| (a) | 89.5 | 89.0 | 90.0 | 91.5 | 89.0 | 94.0 | 90.5 | 89.0 | 92.0 | |
| (b) | 89.0 | 86.0 | 92.0 | 99.0 | 99.0 | 99.0 | 93.0 | 95.0 | 91.0 | |
| (c) | 88.0 | 87.0 | 89.0 | 77.0 | 89.0 | 65.0 | 76.0 | 80.0 | 72.0 | |
| (d) | 87.5 | 85.0 | 90.0 | 83.5 | 72.0 | 95.0 | 80.0 | 70.0 | 90.0 | |
| (e) | 87.0 | 88.0 | 86.0 | 75.5 | 84.0 | 67.0 | 74.5 | 85.0 | 64.0 | |
| Mean | 88.2 | 87.0 | 89.4 | 85.3 | 86.6 | 84.0 | 82.8 | 83.8 | 81.8 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Xiong, Y.; Dang, P.; Tao, C.; Wu, C.; Zhang, E.; Wu, T. A Real-Time Shrimp with and without Shells Recognition Method for Automatic Peeling Machines Based on Tactile Perception. Agriculture 2023, 13, 422. https://doi.org/10.3390/agriculture13020422
Chen X, Xiong Y, Dang P, Tao C, Wu C, Zhang E, Wu T. A Real-Time Shrimp with and without Shells Recognition Method for Automatic Peeling Machines Based on Tactile Perception. Agriculture. 2023; 13(2):422. https://doi.org/10.3390/agriculture13020422
Chicago/Turabian StyleChen, Xueshen, Yuesong Xiong, Peina Dang, Chonggang Tao, Changpeng Wu, Enzao Zhang, and Tao Wu. 2023. "A Real-Time Shrimp with and without Shells Recognition Method for Automatic Peeling Machines Based on Tactile Perception" Agriculture 13, no. 2: 422. https://doi.org/10.3390/agriculture13020422
APA StyleChen, X., Xiong, Y., Dang, P., Tao, C., Wu, C., Zhang, E., & Wu, T. (2023). A Real-Time Shrimp with and without Shells Recognition Method for Automatic Peeling Machines Based on Tactile Perception. Agriculture, 13(2), 422. https://doi.org/10.3390/agriculture13020422