

Design and Experiment of Automatic Transport System for Planting Plate in Plant Factory

Abstract
:1. Introduction
2. Materials and Methods
2.1. Overall Structure and Working Principles of the Cultivation Plate Transport System
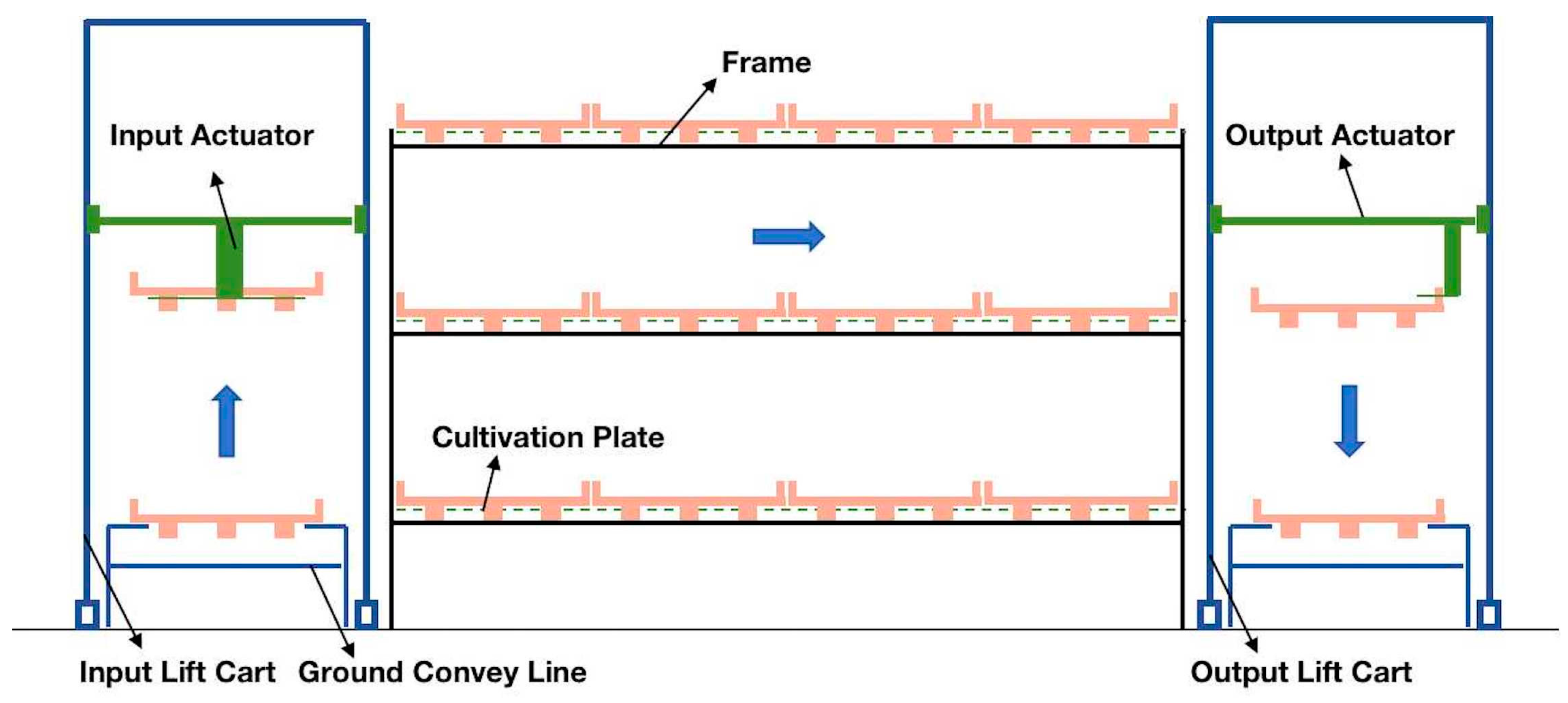
2.1.1. Structure of the Stereoscopic Cultivation Frame and Transport Method
2.1.2. Structure of the Transport System
2.1.3. Working Principle
- The transport system allows movement in the horizontal (X-axis) and vertical (Y-axis) directions, which is accomplished by a lift cart. The input and output actuators are responsible for operating in the Z-axis direction. Each cultivation frame is equipped with a position sensor that helps the lift cart to recognize the target position. For the first input, the lift cart moves to the target cultivation frame and stops. Then, the cultivation plate on the ground conveyor line triggers the sensor on the lift cart, at which point the cultivation plate coincides with the position of the target cultivation trough. The input actuator then grabs it and places it in the cultivation trough. The system repeats this process until one cultivation trough is full. When removing the cultivation plate, the input actuator and the output actuator have to work together. First, the output actuator grips the cultivation plate handle and, with the help of the lift cart, removes the cultivation plate and places it on the ground conveyor line. At the same time, the input actuator grabs a new cultivation plate and puts it into the cultivation trough, so that the output actuator can continue to pick up the next one. The system repeats this operation to achieve continuous transport operation.
2.2. Structural Design of the Lift Cart
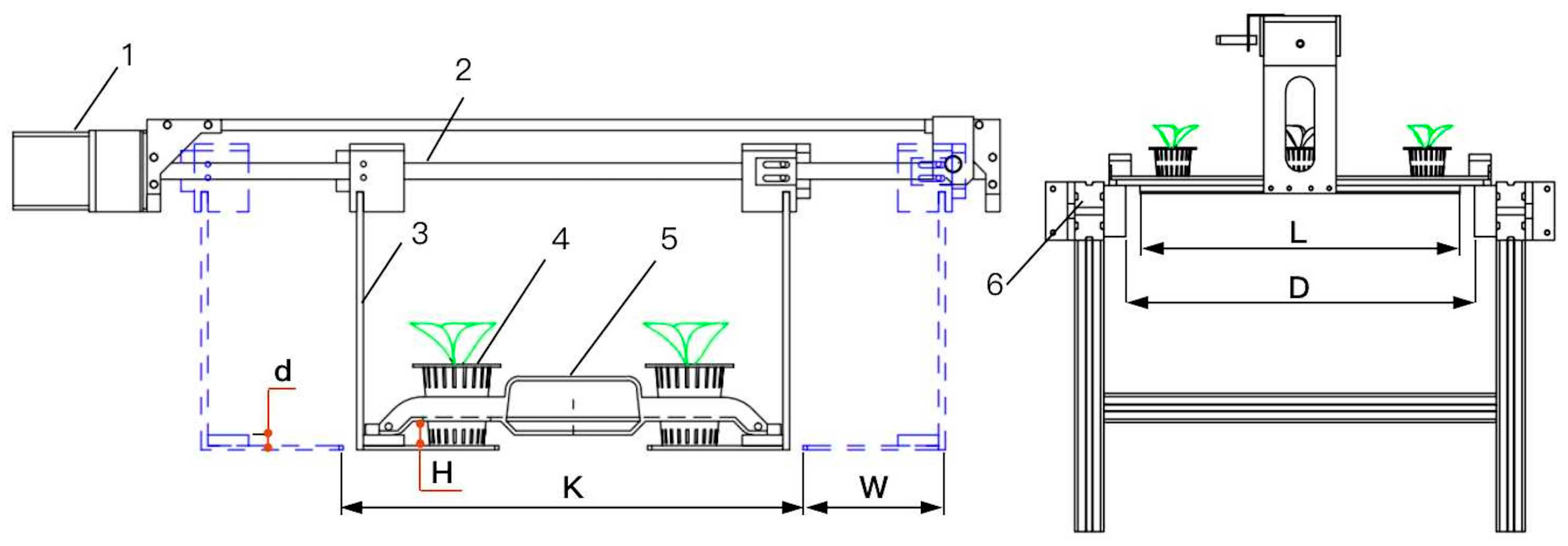
2.3. Design of Key Components of the Input Actuator
2.3.1. Structural Design
2.3.2. Parameter Setting of Clamping and Pushing Mechanism
2.3.3. Force Analysis of the Collision Processes of the Planting Cups
2.3.4. The Control Flow and the PLC Circuit of Cultivation Plate Input and Output Actuators
2.4. Design of Key Components of the Output Actuator
2.4.1. Structural Design and Working Principle
2.4.2. Parameter Design of Linear Reciprocating Motion Components
2.4.3. Parameter Design of Rotating Parts
2.4.4. Force Analysis of the Cultivation Plate during Gripping Process
2.5. Performance Experiments of the Transport System
2.5.1. Positioning Accuracy Experiment Site and Equipment
2.5.2. Experiment Method for Positioning Error
2.5.3. The Success Rate and Efficiency of Transport System
3. Results
3.1. Simulation Analysis of Planting Cup Propulsion Process Based on Dynamic Simulation
3.2. Static Analyses during the Output of the Cultivation Plate
3.3. Analysis of Positioning Accuracy Results
3.4. The Success Rate of the Transport System
4. Discussion
5. Conclusions
- In plant factory stereoscopic cultivation systems, the efficiency of the cultivation plate transport processes is affected by problems such as high labor intensity, low levels of automation, and poor versatility of existing solutions. Therefore, the present study designed a cultivation plate transport system that can automatically input and output cultivation plates, and can flexibly adjust its structure to accommodate different cultivation frame heights. Through in-depth research on the structure and transport methods of cultivation plates, this study systematically designed a lift cart, input actuator, and output actuator, and the structural design and parameter calculation of the key components of each mechanism was carried out.
- During the input process of the cultivation plates, the force analysis of the planting cups showed that the propulsion speed was the main factor affecting their overturning. The center-of-mass displacement curve of a planting cup under different propulsion speeds was simulated using ADAMS 2020 software, and the optimal propulsion speed was determined to be 0.3 m·s−1. During the output process, the ANSYS was used to analyze the static mechanics of cultivation plates, and the results showed that the maximum deformation of a cultivation plate in the vertical direction was 4.15 mm, the tilt angle was 0.45°, and the maximum stress at the handle was 7.50 MPa, which was lower than the yield strength of the cultivation plate. This indicates that the output method of the cultivation plates meets the design requirements and does not cause damage.
- In this study, operation performance experiments were conducted for the transport system, and the experiments showed that the average positioning error in the horizontal direction gradually increased with the increase of the operating speed, while the magnitude change in the vertical direction was small and not significant. Under the premise of ensuring the allowable amount of positioning error in the horizontal and vertical directions, when the running speed of the horizontal motion was 0.2 m·s−1, the maximum positioning error was 2.87 mm, and the relative error was 0.80%. When the running speed of the vertical motion mechanism was 0.3 m·s−1, the maximum positioning error generated was 1.34 mm and the relative error was 0.09%. Under the above two speed conditions, the transport success rates of each layer of the cultivation plate were further tested, and the results showed that the transport success rates of each layer were between 92.5% and 96.0%, and the operation performance could reach from 176 plates/h to 317 plates/h. The experiments confirmed that the cultivation plate transport system designed in this study demonstrated a stable transport performance, and it is of practical application significance for upgrading the automation level of stereoscopic cultivation in plant factories.
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- UN. World Urbanization Prospects: The 2018 Revision; UN: New York, NY, USA, 2019; ISBN 978-92-1-148319-2. [Google Scholar]
- FAO. FAO Publications Catalogue; FAO: Quebec City, QC, Canada, 2021. [Google Scholar]
- Pomoni, D.I.; Koukou, M.K.; Vrachopoulos, M.G.; Vasiliadis, L. A Review of Hydroponics and Conventional Agriculture Based on Energy and Water Consumption, Environmental Impact, and Land Use. Energies 2023, 16, 1690. [Google Scholar] [CrossRef]
- Eaves, J.; Eaves, S. Comparing the Profitability of a Greenhouse to a Vertical Farm in Quebec. Can. J. Agri. Econ. 2018, 66, 43–54. [Google Scholar] [CrossRef]
- Zhang, Y.; Kacira, M. Comparison of Energy Use Efficiency of Greenhouse and Indoor Plant Factory System. Eur. J. Hortic. Sci. 2020, 85, 310–320. [Google Scholar] [CrossRef]
- Eaton, M.; Harbick, K.; Shelford, T.; Mattson, N. Modeling Natural Light Availability in Skyscraper Farms. Agronomy 2021, 11, 1684. [Google Scholar] [CrossRef]
- Graamans, L.; Baeza, E.; van den Dobbelsteen, A.; Tsafaras, I.; Stanghellini, C. 10Plant Factories versus Greenhouses: Comparison of Resource Use Efficiency. Agric. Syst. 2018, 160, 31–43. [Google Scholar] [CrossRef]
- Jin, W.; Formiga Lopez, D.; Heuvelink, E.; Marcelis, L.F.M. Light Use Efficiency of Lettuce Cultivation in Vertical Farms Compared with Greenhouse and Field. Food Energy Secur. 2023, 12, e391. [Google Scholar] [CrossRef]
- Yan, Z.; He, D.; Niu, G.; Zhai, H. Evaluation of Growth and Quality of Hydroponic Lettuce at Harvest as Affected by the Light Intensity, Photoperiod and Light Quality at Seedling Stage. Sci. Hortic. 2019, 248, 138–144. [Google Scholar] [CrossRef]
- Zhou, J.; Li, P.; Wang, J. Effects of Light Intensity and Temperature on the Photosynthesis Characteristics and Yield of Lettuce. Horticulturae 2022, 8, 178. [Google Scholar] [CrossRef]
- Masuda, K.; Yamada, T.; Kagawa, Y.; Fukuda, H. Application of Time Lags between Light and Temperature Cycles for Growth Control Based on the Circadian Clock of Lactuca sativa L. Seedlings. Front. Plant Sci. 2022, 13, 994555. [Google Scholar] [CrossRef]
- Eaton, M.; Shelford, T.; Cole, M.; Mattson, N. Modeling Resource Consumption and Carbon Emissions Associated with Lettuce Production in Plant Factories. J. Clean. Prod. 2023, 384, 135569. [Google Scholar] [CrossRef]
- Huang, L.-C.; Chen, Y.-H.; Chen, Y.-H.; Wang, C.-F.; Hu, M.-C. Food-Energy Interactive Tradeoff Analysis of Sustainable Urban Plant Factory Production Systems. Sustainability 2018, 10, 446. [Google Scholar] [CrossRef]
- Baghalian, K.; Hajirezaei, M.-R.; Lawson, T. Editorial: Current and Future Perspectives for Controlled Environment Agriculture (CEA) in the 21st Century. Front. Plant Sci. 2023, 14, 1334641. [Google Scholar] [CrossRef] [PubMed]
- Jürkenbeck, K.; Heumann, A.; Spiller, A. Sustainability Matters: Consumer Acceptance of Different Vertical Farming Systems. Sustainability 2019, 11, 4052. [Google Scholar] [CrossRef]
- Chen, K.; Zhao, B.; Zhou, L.; Zheng, Y. Artificial Neural Network-Based Seedling Phenotypic Information Acquisition of Plant Factory. Agriculture 2023, 13, 888. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, Y.; Chen, J.; Zhou, H.; Jiang, Y.; Tong, J.; Wu, L. Trajectory Synthesis and Optimization Design of an Unmanned Five-Bar Vegetable Factory Packing Machine Based on NSGA-II and Grey Relation Analysis. Agriculture 2023, 13, 1366. [Google Scholar] [CrossRef]
- Tong, Y.; Oh, M.-M.; Fang, W. Editorial: Advanced Technologies for Energy Saving, Plant Quality Control and Mechanization Development in Plant Factory. Front. Plant Sci. 2023, 14, 1193158. [Google Scholar] [CrossRef] [PubMed]
- Takatsuji, M. Plant Factory System; CMC Academic Press: Tokyo, Japan, 2001. [Google Scholar]
- Urban Crop Solutions Offers a Glowing and Growing Global Future for Indoor Farming. 2018. Available online: https://urbancropsolutions.com/2018/09/25/urban-crop-solutions-offers-a-glowing-and-growing-global-future-for-indoor-farming/ (accessed on 24 December 2023).
- Ohara, H.; Hirai, T.; Kouno, K.; Nishiura, Y. Automatic Plant Cultivation System (Automated Plant Factory). Environ. Control Biol. 2015, 53, 93–99. [Google Scholar] [CrossRef]
- Yu, C.; Gao, Z.; Xu, L.; Wang, Q.; Niu, C.; Cao, X. Optimization and experiment of the multifunctional operation platform of the stereo cultivation system for plant factory. Trans. CSAE 2022, 38, 266–275. [Google Scholar] [CrossRef]
- Zhou, Y.; Mao, H.; Hu, S.; Xu, S. Design and Experiment on the Cultivation Plate Auto Transportation Device of Plant Factory. J. Agric. Mech. Res. 2017, 39, 135–139. [Google Scholar] [CrossRef]
- Ji, H.; Xie, Z.; Gu, M.; Chu, Q.; Yang, Y.; Liu, H.; Gu, S. Design and Experiment of Plant Board Logistics Transportation System in Plant Factory. J. Agric. Mech. Res. 2023, 45, 78–82. [Google Scholar] [CrossRef]
- Li, Z.; Yang, Q.; Sha, D.; Ma, W. Research progress on the full mechanization production of hydroponic leafy vegetables in plant factory. J. China Agric. Univ. 2022, 27, 12–21. [Google Scholar] [CrossRef]
- Gu, S.; Ji, H.; Yang, Y.; Chu, Q.; Yang, Y.; Liu, H.; Jiang, X. Analysis on Transporting Methods of Cultivation Unit for Vertical Cultivation in Plant Factory. Agriculture 2021, 11, 989. [Google Scholar] [CrossRef]
- SANANBIO. Introducing the SANANBIO Uplift-A Fully-Automated Vertical Farming Platform. 2019. Available online: https://www.sananbio.com.cn/solutions/uplift (accessed on 18 December 2023).
- Watawana, B.; Isaksson, M. Design and Simulations of a Self-Assembling Autonomous Vertical Farm for Urban Farming. Agriculture 2023, 13, 112. [Google Scholar] [CrossRef]
- Quan, L.; Peng, T.; Shen, L.; An, S.; Ji, Z.; Sun, T. Parameter optimization and experiment of manipulator for three-dimensional seedling tray management robot. Trans. CSAE 2017, 33, 10–19. [Google Scholar] [CrossRef]
- Gao, Z.; Xu, L.; Li, C.; Xing, J.; Liu, W.; Shi, L. Path Correction Control Method for Mobile Platform Guidance System in Plant Factory. J. Agric. Mech. Res. 2017, 39, 7–14+25. [Google Scholar] [CrossRef]
- Wang, S.; Zhao, B.; Yi, S.; Zhou, Z.; Zhao, X. GAPSO-Optimized Fuzzy PID Controller for Electric-Driven Seeding. Sensors 2022, 22, 17. [Google Scholar] [CrossRef]
- Zhou, W.; An, T.; Wang, J.; Fu, Q.; Wen, N.; Sun, X.; Wang, Q.; Liu, Z. Design and Experiment of a Targeted Variable Fertilization Control System for Deep Application of Liquid Fertilizer. Agronomy 2023, 13, 7. [Google Scholar] [CrossRef]
- Ke, Z. Lectotype and Checking Calculation of Friction Stir Welding Servo Motor. Mech. Electr. Eng. Technol. 2022, 51, 58–61. [Google Scholar]
- Ma, X.; Wei, Y.; Cao, X.; Li, Z.; Qi, L.; Li, H.; Xiao, R. Design and experiment of an automatic rice seedling tray palletizer. Trans. CSAE 2022, 38, 1–10. [Google Scholar] [CrossRef]
- Wang, W.; Yang, R.; Pan, Z.; Qing, Y.; Zhang, J.; Chen, D.; Guo, X.; Lyu, S. Design and Experimental Study of Single Plant Harvester for Potato Breeding Experiments. Agriculture 2024, 14, 71. [Google Scholar] [CrossRef]
- Lu, D.; Wang, W.; Bao, E.; Wang, S.; Wu, X.; Bai, Z.; Tang, Y. Cutting Mechanical Properties of Pumpkin Grafted Seedling Investigated by Finite Element Simulation and Experiment. Agriculture 2022, 12, 1354. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Components | Parameters |
|---|---|
| Horizontal drive motor | Power P = 0.75 kW, rated torque T = 2.39 N.m, rated speed n = 3000 rpm. |
| Vertical drive motor | Power P = 0.75 kW, rated torque T = 2.39 N.m, rated speed n = 3000 rpm. |
| Driving wheels | Diameter D1 = 60 mm, width = 42 mm. |
| Chain transmission component | Sprocket pitch P = 9.525 mm, distribution circle diameter = 82 mm, 27 teeth. Chain type = 06B. |
| Synchronous belt drive components | Belt wheel: pitch P = 5 mm, 33 teeth, pitch circle diameter D2 = 52 mm. Synchronization bandwidth = 50 mm, length = 3410 mm. |
| Driving shaft | Diameter = 25 mm, the length = 1070 mm. |
| Inductive proximity switches | Thread diameter = M12, PNP normally open, working voltage = DC 10–30 V, maximum detection distance = 15 mm, model = I2B1204NO. |
| Constraints | Objects |
|---|---|
| Moving Sub | Cultivation plate with support ground |
| Contact | Planting cup with support ground |
| Planting cup with cultivation plate | |
| Cultivation plate with support ground | |
| Drive | Cultivation plate |
| Running Speed (m·s−1) | Horizontal Direction | Vertical Direction | ||||
|---|---|---|---|---|---|---|
| Horizontal Theoretical Displacement (mm) | Horizontal Positioning Error (mm) | Horizontal Relative Error (%) | Vertical Theoretical Displacement (mm) | Vertical Positioning Error (mm) | Vertical Relative Error (%) | |
| 0.1 | 180 | 0.87 | 0.48% | 114 | 0.86 | 0.75% |
| 359 | 1.30 | 0.36% | 799 | 0.72 | 0.09% | |
| 718 | 1.13 | 0.16% | 1484 | 0.84 | 0.06% | |
| Average value | 1.10 | 0.81 | ||||
| 0.2 | 180 | 2.27 | 1.26% | 114 | 0.80 | 0.70% |
| 359 | 2.87 | 0.80% | 799 | 0.93 | 0.12% | |
| 718 | 2.13 | 0.30% | 1484 | 0.97 | 0.07% | |
| Average value | 2.42 | 0.90 | ||||
| 0.3 | 180 | 7.35 | 4.08% | 114 | 1.12 | 0.98% |
| 359 | 8.42 | 2.35% | 799 | 0.98 | 0.12% | |
| 718 | 7.95 | 1.11% | 1484 | 1.34 | 0.09% | |
| Average value | 7.91 | 1.15 | ||||
| 0.4 | 180 | 13.23 | 7.35% | 114 | 4.73 | 4.15% |
| 359 | 14.33 | 3.99% | 799 | 5.36 | 0.67% | |
| 718 | 14.20 | 1.98% | 1484 | 5.10 | 0.34% | |
| Average value | 13.92 | 5.06 | ||||
| Cultivation Layer | Number of Experiments | Success Rate | Total Time | Average Time | Working Efficiency |
|---|---|---|---|---|---|
| The upper layer | 50 | 96.0% | 1025 s | 20.50 s | 176 plates/h |
| The middle layer | 100 | 94.0% | 1574 s | 15.74 s | 229 plates/h |
| The lower layer | 200 | 92.5% | 2267 s | 11.34 s | 317 plates/h |
| Average value | 94.2% | 241 plates/h |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, D.; Guo, W.; Wang, L.; Zheng, W.; Gao, G. Design and Experiment of Automatic Transport System for Planting Plate in Plant Factory. Agriculture 2024, 14, 488. https://doi.org/10.3390/agriculture14030488
Jia D, Guo W, Wang L, Zheng W, Gao G. Design and Experiment of Automatic Transport System for Planting Plate in Plant Factory. Agriculture. 2024; 14(3):488. https://doi.org/10.3390/agriculture14030488
Chicago/Turabian StyleJia, Dongdong, Wenzhong Guo, Lichun Wang, Wengang Zheng, and Guohua Gao. 2024. "Design and Experiment of Automatic Transport System for Planting Plate in Plant Factory" Agriculture 14, no. 3: 488. https://doi.org/10.3390/agriculture14030488
APA StyleJia, D., Guo, W., Wang, L., Zheng, W., & Gao, G. (2024). Design and Experiment of Automatic Transport System for Planting Plate in Plant Factory. Agriculture, 14(3), 488. https://doi.org/10.3390/agriculture14030488