Precision for Smallholder Farmers: A Small-Scale-Tailored Variable Rate Fertilizer Application Kit


Abstract
:1. Introduction
2. Materials and Methods
2.1. Selection of N-Sensor
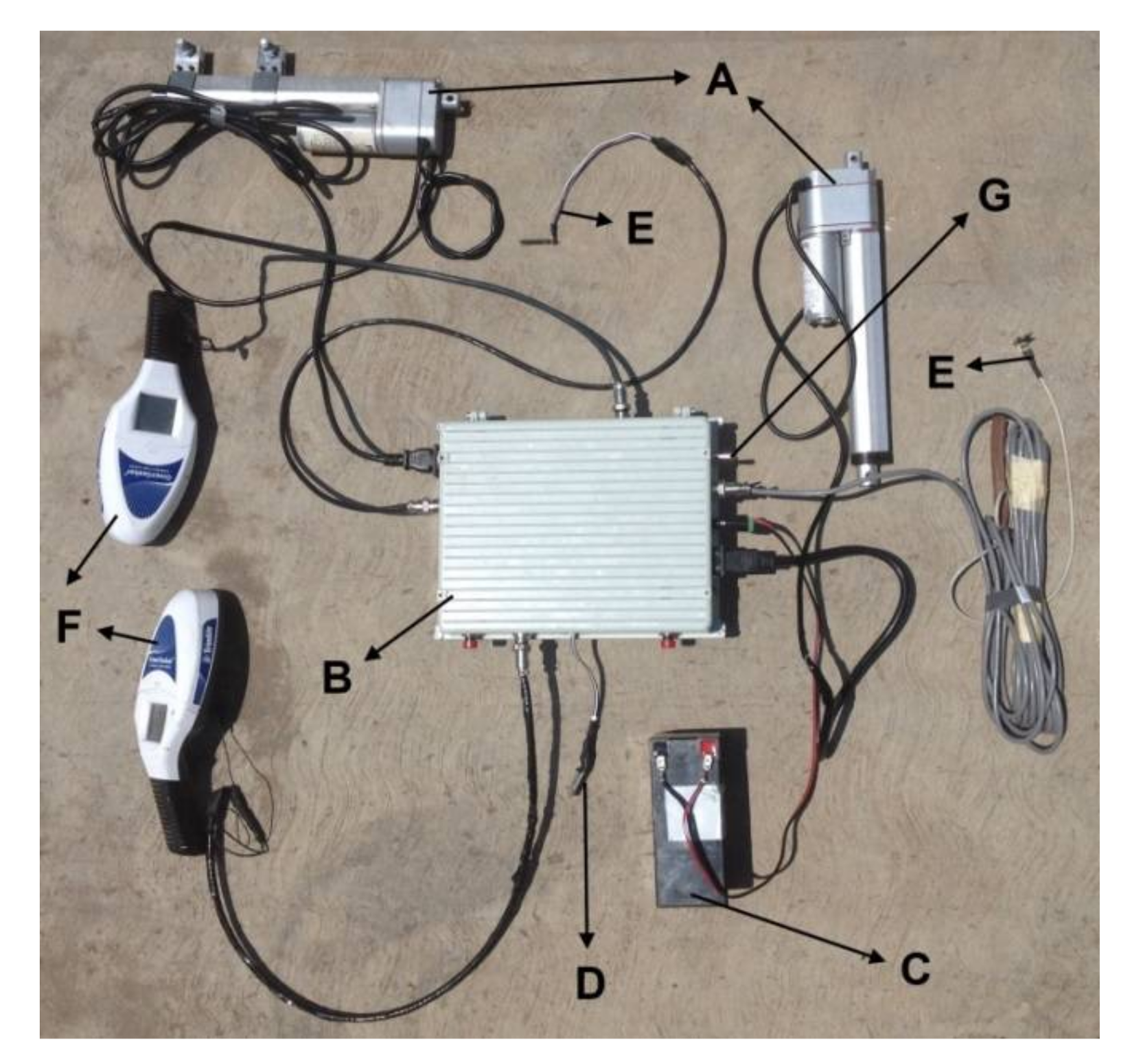
2.2. Prototype Add-On Kit Set-Up
2.3. Test Bench Trials
3. Results
3.1. N-Sensors Capture Continuous NDVI Data
3.2. Data Processing: Linking N-Sensor Output to Actuator Piston Trigger
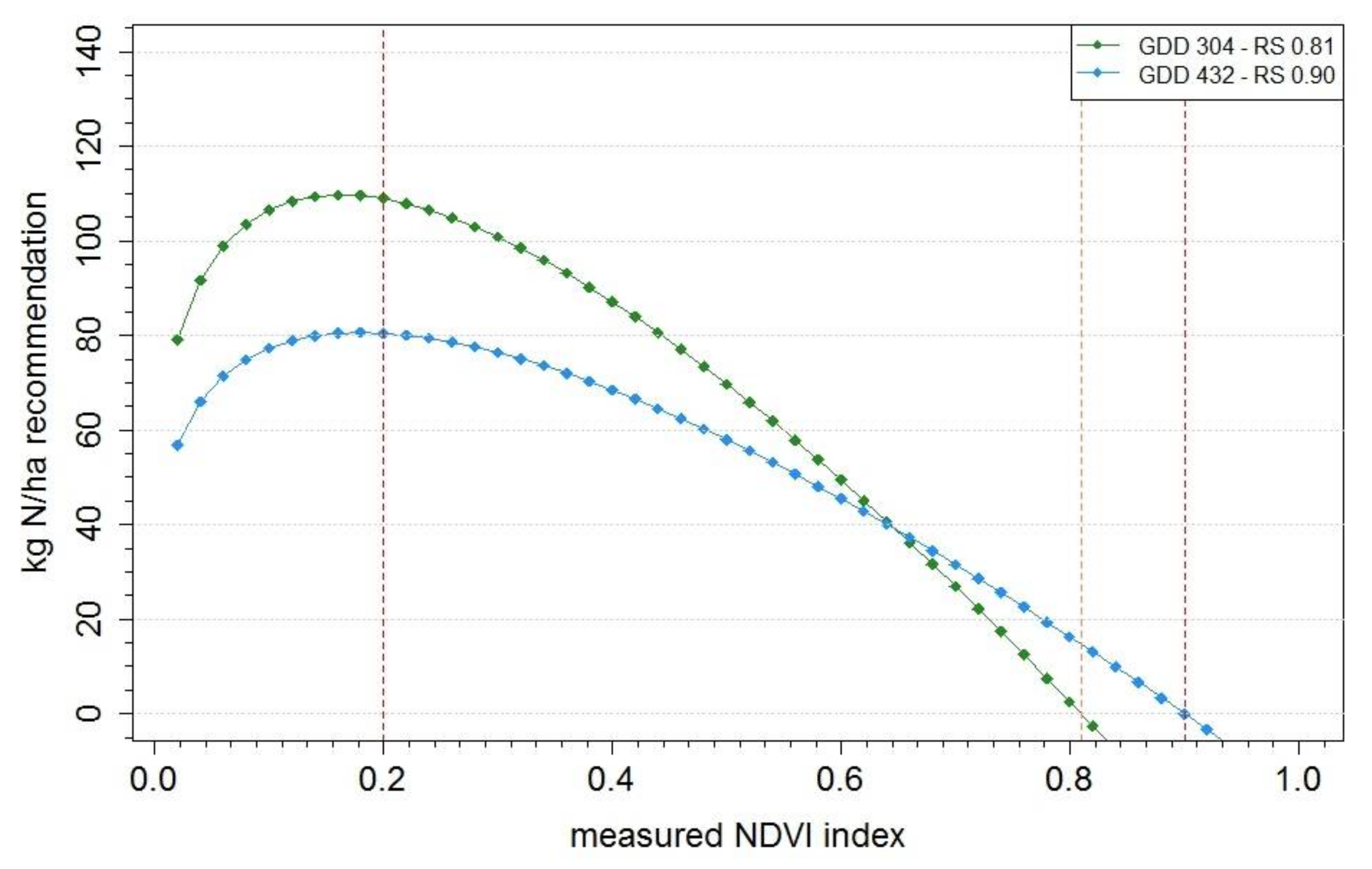
3.3. Real-Time Adjustment to Achieve a Variable Rate Application
4. Discussion
4.1. VRA-Kit Prototype Performance
4.2. Fertilizer Selection for Precision Agriculture
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Nelson, G.C.; Rosegrant, M.W.; Roertson, R.; Sulser, T.; Zhu, T.; Ringler, C.; Msangi, S.; Palazzo, A.; Batka, M.; Magalhaes, M.; et al. Climate Change: Impact on Agriculture and Costs of Adaptation; International Food Policy Research Institute (IFPRI): Washington, DC, USA, 2009. [Google Scholar]
- Satterthwaite, D.; McGranahan, G.; Tacoli, C. Urbanization and its implications for food and farming. Philos. Trans. R. Soc. B Biol. Sci. 2010, 365, 2809–2820. [Google Scholar] [CrossRef] [PubMed]
- Comprehensive Assessment of Water Management in Agriculture (CAWMA). Water for Food, Water for Life: A Comprehensive Assessment of Water Management in Agriculture; Earthscan: London, UK; International Water Management Institute: Colombo, Sri Lanka, 2007. [Google Scholar]
- Secretaría de Economía (SE). SNIIM-Sistema Nacional de Información de Mercado. Precios de Insumos Agrícolas. Available online: http://www.economia-sniim.gob.mx/nuevo/ (accessed on 5 January 2016).
- Godfray, H.C.J.; Beddington, J.R.; Crute, I.R.; Haddad, L.; Lawrence, D.; Muir, J.F.; Pretty, J.; Robinson, S.; Thomas, S.M.; Toulmin, C. Food security: The challenge of feeding 9 billion people. Science 2010, 327, 812–818. [Google Scholar] [CrossRef] [PubMed]
- Grisso, R.; Alley, M.; Thomason, W.; Holshouser, D.; Roberson, G. Precision Farming Tools: Variable-Rate Application. Virginia Coop. Ext. 2011, 442–505, 1–16. [Google Scholar]
- Van Loon, J.; Vansteenkiste, J.; Diels, J.; Schrevens, E. Developing and testing a model for open field horticultural crops to enable use of a “just-in-time” fertilization management. In Proceedings of the 19th International Congress on Modelling and Simulation (Modsim2011), Perth, Australia, 12–16 December 2011. [Google Scholar]
- Kitchen, N.R.; Shanahan, J.F.; Roberts, D.F.; Sudduth, K.A.; Scharf, P.C.; Ferguson, R.B. Economic and Environmental Benefits from Canopy Sensing for Variable-Rate Nitrogen Corn Fertilization. In Proceedings of the American Society of Agricultural and Biological Engineers Annual International Meeting, Reno, Nevada, 21 June–24 June 2009. [Google Scholar]
- Shanahan, J.F.; Kitchen, N.R.; Raun, W.R.; Schepers, J.S. Responsive in-season nitrogen management for cereals. Comput. Electron. Agric. 2008, 61, 51–62. [Google Scholar] [CrossRef]
- Inman, D.; Khosla, R.; Westfall, D.G.; Koch, B. Evaluation of profitability across site-specific management zones in irrigated maize production fields. In Precision Agriculture ’07; Stafford, J., Ed.; Wageningen Academic Publishers: Wageningen, The Netherlands, 2007; pp. 835–850. [Google Scholar]
- Koch, B.; Khosla, R.; Frasier, W.M.; Westfall, D.G.; Inman, D. Economic feasibility of variable-rate nitrogen application utilizing site-specific management zones. Agron. J. 2004, 96, 1572–1580. [Google Scholar] [CrossRef]
- Lawlor, D.G.; Lemaire, G.; Gastal, F. Nitrogen, plant growth and crop yield. In Plant Nitrogen; Lea, P.J., Morot-Gaudry, J., Eds.; Springer: Berlin, Germany, 2001; pp. 343–367. [Google Scholar]
- Clevers, J.G.P.W.; Kooistra, L. Using hyperspectral remote sensing data for retrieving canopy chlorophyll and nitrogen content. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 574–583. [Google Scholar] [CrossRef]
- Evans, J.R. Nitrogen and photosynthesis in the flag leaf of wheat (Triticum aestivum L.). Plant Physiol. 1983, 72, 297–302. [Google Scholar] [CrossRef] [PubMed]
- Tubaña, B.S.; Arnall, D.B.; Walsh, O.; Chung, B.; Solie, J.B.; Girma, K.; Raun, W.R. Adjusting midseason nitrogen rate using a sensor-based optimization algorithm to increase use efficiency in corn. J. Plant Nutr. 2008, 31, 1393–1419. [Google Scholar] [CrossRef]
- Raun, B.; Solie, J.; May, J.; Zhang, H.; Taylor, R.; Arnall, B.; Ortiz-Monasterio, I. Nitrogen Rich Strips for Wheat, Corn and Other Crops; Oklahoma Cooperative Extension Service, E-1022: Stillwater, OK, USA, 2010. [Google Scholar]
- Ortiz-Monasterio, J.I.; Raun, W. Reduced nitrogen and improved farm income for irrigated spring wheat in the Yaqui Valley, Mexico, using sensor based nitrogen management. Paper presented at international workshop on increasing wheat yield potential, CIMMYT, Obregon, Mexico, 20–24 March 2. J. Agric. Sci. 2007, 145, 215–222. [Google Scholar] [CrossRef]
- Santillano-Cazares, J.; Lopez-Lopez, A.; Ortiz-Monasterio, I.; Raun, W.R. Uso de sensores opticos para la fertilizacion de trigo (Triticum aestivum L.). Terra Latinoam. 2013, 31, 95–103. [Google Scholar]
- Govaerts, B.; Verhulst, N. The Normalized Difference Vegetation Index (NDVI) Greenseeker (TM) Handheld Sensor: Toward the Integrated Evaluation of Crop Management. Part A: Concepts and Case Studies; CIMMYT: Mexico City, Mexico, 2010. [Google Scholar]
- Solie, J.B.; Dean Monroe, A.; Raun, W.R.; Stone, M.L. Generalized algorithm for variable-rate nitrogen application in cereal grains. Agron. J. 2012, 104, 378–387. [Google Scholar] [CrossRef]
- Muñoz-Huerta, R.F.; Guevara-Gonzalez, R.G.; Contreras-Medina, L.M.; Torres-Pacheco, I.; Prado-Olivarez, J.; Ocampo-Velazquez, R.V. A review of methods for sensing the nitrogen status in plants: Advantages, disadvantages and recent advances. Sensors 2013, 13, 10823–10843. [Google Scholar] [CrossRef] [PubMed]
- CIMMYT. MasAgro. Available online: http://conservacion.cimmyt.org/index.php/es/noticias/690-masagro-greensat-ahora-en-linea (accessed on 18 May 2016).
- Caturegli, L.; Corniglia, M.; Gaetani, M.; Grossi, N.; Magni, S.; Migliazzi, M.; Angelini, L.; Mazzoncini, M.; Silvestri, N.; Fontanelli, M.; et al. Unmanned aerial vehicle to estimate nitrogen status of turfgrasses. PLoS ONE 2016, 11, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Samseemoung, G.; Soni, P.; Sirikul, C. Monitoring and precision spraying for orchid plantation with wireless WebCAMs. Agriculture 2017, 7, 87. [Google Scholar] [CrossRef]
- Eerens, H.; Haesen, D.; Rembold, F.; Urbano, F.; Tote, C.; Bydekerke, L. Image time series processing for agriculture monitoring. Environ. Model. Softw. 2014, 53, 154–162. [Google Scholar] [CrossRef]
- Yang, C.; Everitt, J.H.; Bradford, J.M. Comparisons of uniform and variable rate nitrogen and phosphorus fertilizer applications for grain sorghum. Trans. ASAE Am. Soc. Agric. Eng. 2001, 201, 201–209. [Google Scholar]
- Basso, B.; Dumont, B.; Cammarano, D.; Pezzuolo, A.; Marinello, F.; Sartori, L. Environmental and economic benefits of variable rate nitrogen fertilization in a nitrate vulnerable zone. Sci. Total Environ. 2016, 545–546, 227–235. [Google Scholar] [CrossRef] [PubMed]
- Crain, J.; Ortiz-Monasterio, I.; Raun, B. Evaluation of a reduced cost active NDVI sensor for crop nutrient management. J. Sens. 2012. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the Great Plains with ERTS. In Proceedings of the Third Earth Resources Technology Satellite Symposium, NASA SP-351, Washington, DC, USA, 10–14 December 1973. [Google Scholar]
- Hegedus, B.; Drexler, D.; Gyuricza, C.; Sardi, K.; Jung, A.; Vohland, M. Rapid Monitoring of Organic Foliar Fertilizer Treatments on Organic Spelt by a Portable SPAD 502 Chlorophyll Meter and Field Spectroscopy; Deutshen Gesellschaft fur Photogramm, Fernderkundung und Geoinformation; DGPF Tagungsband: Hamburg, Germany, 2014; Volume 23. [Google Scholar]
- Jorgenson, M.E. Choosing the Right Seeding and Fertilizer Equipment. In Gleanings 558; Prairie Agricultural Machinery Institute: Humboldt, SK, Canada, 1988. [Google Scholar]
- Linak. Linear Actuators. Available online: http://www.linak.com/products/linear-actuators.aspx (accessed on 24 May 2016).
- Yule, I.; Mackenzie, J.; Killick, M.; Mackenzie, C. A Comparison of Crop Sensor Systems for Informing Fertiliser Placement. 2011. Available online: http://tur-www1.massey.ac.nz/~flrc/workshops/11/Manuscripts/Yule_2_2011.pdf (accessed on 12 March 2018).
- USGS. NDVI, the Foundation for Remote Sensing Phenology. Available online: https://phenology.cr.usgs.gov/ndvi_foundation.php (accessed on 12 March 2018).
- Raun, W.R.; Solie, J.B.; Stone, M.L.; Martin, K.L.; Freeman, K.W.; Mullen, R.W.; Zhang, H.; Schepers, J.S.; Johnson, G.V. Optical sensor-based algorithm for crop nitrogen fertilization. Commun. Soil Sci. Plant Anal. 2005, 36, 2759–2781. [Google Scholar] [CrossRef]
- Joernsgaard, B.; Halmoe, S. Intra-field yield variation over crops and years. Eur. J. Agron. 2003, 19, 23–33. [Google Scholar] [CrossRef]
- Food and Agriculture Organization (FAO). Fertilizer and Their Use—A Pocket Guide for Extension Officers; FAO and IFA: Rome, Italy, 2000. [Google Scholar]
- Roy, R.N.; Finck, A.; Blair, G.J.; Tandon, H.L.S. Plant nutrition for food security–A guide for integrated nutrient management. In FAO Fertilizer and Plant Nutrition Bulletin 16; FAO: Rome, Italy, 2006. [Google Scholar]
- Janssen, C.; Myers, C. Agricultural Fertilizer Application. In Purdue Extension PPP-14; Purdue University: Lafayette, IN, USA, 2011. [Google Scholar]
- Miller, W.M.; Schumann, A.; Whitney, J.D.; Buchanon, S. Variable rate applications of granular fertilizer for citrus test plots. Appl. Eng. Agric. 2005, 21, 795–801. [Google Scholar] [CrossRef]
- Tola, E.; Kataoka, T.; Burce, M.; Okamoto, H.; Hata, S. Granular fertiliser application rate control system with integrated output volume measurement. Biosyst. Eng. 2008, 101, 411–416. [Google Scholar] [CrossRef]
- Talha, Z.; Tola, E.; Kheiralla, A.F. Pneumatic system for granular fertilizer flow rate control. Middle-East J. Sci. Res. 2011, 8, 688–693. [Google Scholar]
- Forouzanmehr, E.; Loghavi, M. Design, development and field evaluation of a map-based variable rate granular fertilizer application control system. Agric. Eng. Int. CIGR J. 2012, 14, 255–261. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | VI Used | Installation | Estimated Price for Complete System in USD ⱡ | Manufacturer/Reference |
|---|---|---|---|---|
| GreenSeeker® Handheld | NDVI | Handheld—1 sensor | 550 | Trimble Inc., Sunnyvale, CA, USA |
| GreenSeeker® RT100 | NDVI | Handheld or mounted on tractor—1 sensor/1 display | 5500 | Trimble Inc., Sunnyvale, CA, USA |
| SPAD 502 | NDVI | Handheld—1 sensor/1 display | 5662 | Konica Minolta; [30] |
| OptRx® Crop Sensor | REIP | Anywhere on tractor—2 sensors + command kit | 11,000 | AgLeader Technology, Ames, IA, USA |
| CROP SPEC | NDVI | Anywhere on tractor—2 sensors and display, mapping and application system | 18,000 | Topcon Positioning Systems, Inc., Livermore, CA, USA |
| Crop Circle™ | NDVI | Handheld or mounted—3 sensors and display, mapping and application system | 17,500 | Holland Scientific, Lincoln, NE, USA |
| Yara N Sensor® | NDVI | Top of tractor—2 sensors and display, mapping and application system | 25,000 | Yara UK Limited, Lincolnshire, UK |
| ISARIA | REIP | Boom system on tractor—2 sensor system, with display mapping and application system | 30,000 | Fritzmeier Umwelttechnik, Großhelfendorf, Germany |
| Multiplex® | NBI | Anywhere on tractor—2 sensor system | 33,000 | Force A, Orsay, France |
| Colour | HEX-Value | HSV-Value | Average NDVI |
|---|---|---|---|
| Red | #CA021C | 352°,99,79 | 0.12 |
| Pink | #D0ABB6 | 342°,18,82 | 0.23 |
| Cyan | #008D4 | 179°,100,85 | 0.43 |
| Violet | #97A2E1 | 231°,33,88 | 0.57 |
| Emerald | #46D582 | 145°,67,79 | 0.60 |
| Green | #00C87F | 158°,100,78 | 0.81 |
| Colour | PRE | AVG Sensor 1 | AVG Sensor 2 |
|---|---|---|---|
| Cyan | 0.43 | 0.44 ± 0.01 | 0.42 ± 0.02 |
| Red | 0.12 | 0.11 ± 0.00 | 0.13 ± 0.00 * |
| Green | 0.81 | 0.80 ± 0.01 | 0.82 ± 0.00 * |
| Violet | 0.57 | 0.57 ± 0.00 | 0.57 ± 0.00 |
| Emerald | 0.60 | 0.60 ± 0.00 | 0.59 ± 0.00 * |
| Pink | 0.23 | 0.22 ± 0.00 | 0.23 ± 0.00 |
| Colour Panel | Expected Value | kg N/ha Released | |
|---|---|---|---|
| Measured Pair 1 | Measured Pair 2 | ||
| Cyan | 82.2 | 136.4 | 95.4 |
| 113.9 | 89.1 | ||
| 113 | 92.6 | ||
| Green | 0 | −0.02 | −6.6 |
| 10.4 | −4.8 | ||
| 14.2 | 3.1 | ||
| Violet | 55.6 | 89.3 | 87.7 |
| 101.2 | 86.8 | ||
| 107.5 | 99.4 | ||
| Emerald | 49.4 | 89.2 | 88 |
| 91.4 | 86.3 | ||
| 107 | 95 | ||
| Pink | 107.2 | 87.6 | 87.3 |
| 88.9 | 85.3 | ||
| 109.4 | 93.6 | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Van Loon, J.; Speratti, A.B.; Gabarra, L.; Govaerts, B. Precision for Smallholder Farmers: A Small-Scale-Tailored Variable Rate Fertilizer Application Kit. Agriculture 2018, 8, 48. https://doi.org/10.3390/agriculture8040048
Van Loon J, Speratti AB, Gabarra L, Govaerts B. Precision for Smallholder Farmers: A Small-Scale-Tailored Variable Rate Fertilizer Application Kit. Agriculture. 2018; 8(4):48. https://doi.org/10.3390/agriculture8040048
Chicago/Turabian StyleVan Loon, Jelle, Alicia B. Speratti, Louis Gabarra, and Bram Govaerts. 2018. "Precision for Smallholder Farmers: A Small-Scale-Tailored Variable Rate Fertilizer Application Kit" Agriculture 8, no. 4: 48. https://doi.org/10.3390/agriculture8040048
APA StyleVan Loon, J., Speratti, A. B., Gabarra, L., & Govaerts, B. (2018). Precision for Smallholder Farmers: A Small-Scale-Tailored Variable Rate Fertilizer Application Kit. Agriculture, 8(4), 48. https://doi.org/10.3390/agriculture8040048