
Hydrodynamics of a Moored Permeable Vertical Cylindrical Body




Abstract
:1. Introduction
2. Material and Methods
2.1. Hydrodynamic Formulation
2.2. Hydrodynamic Forces
3. Motion Equations
3.1. Mooring Line Characteristics
3.2. Equations of Motion
4. Results and Discussion
4.1. Methodology Validation
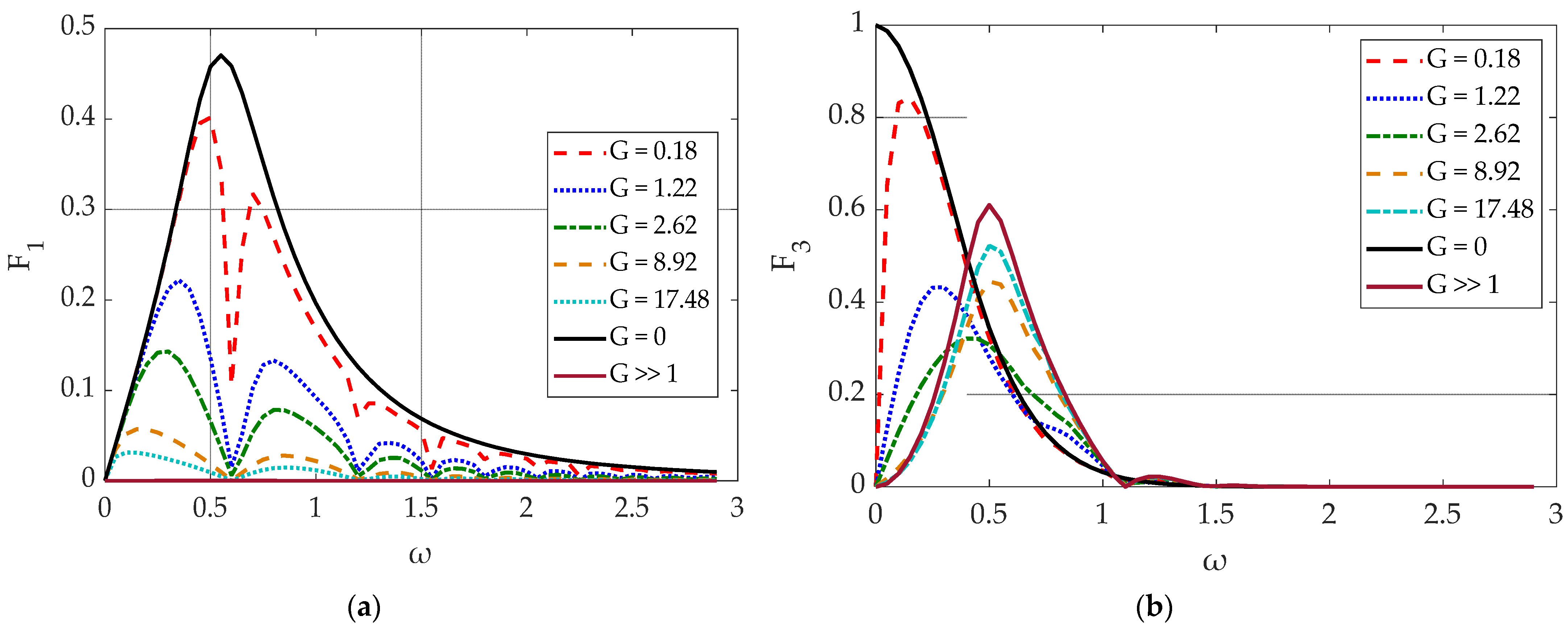
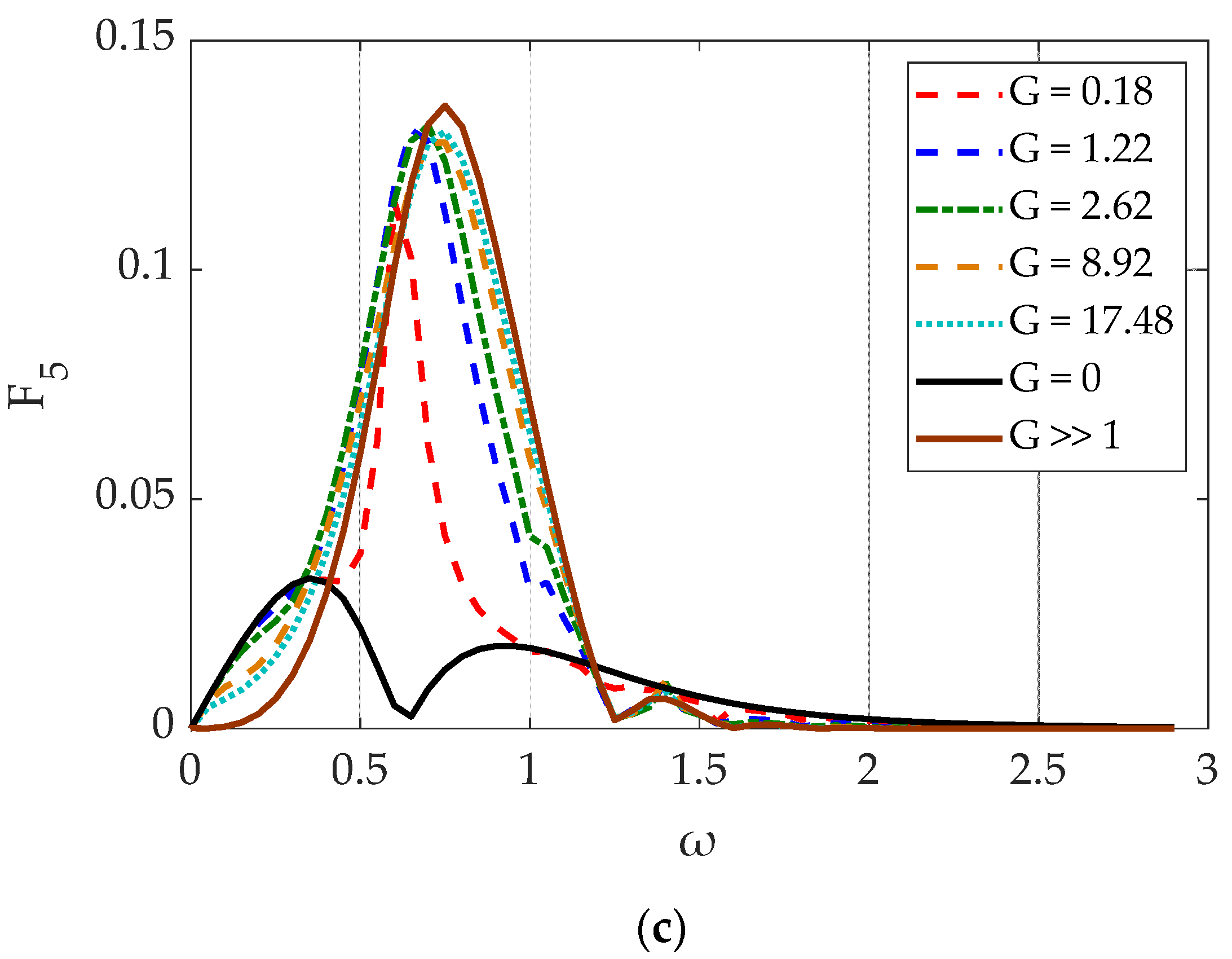
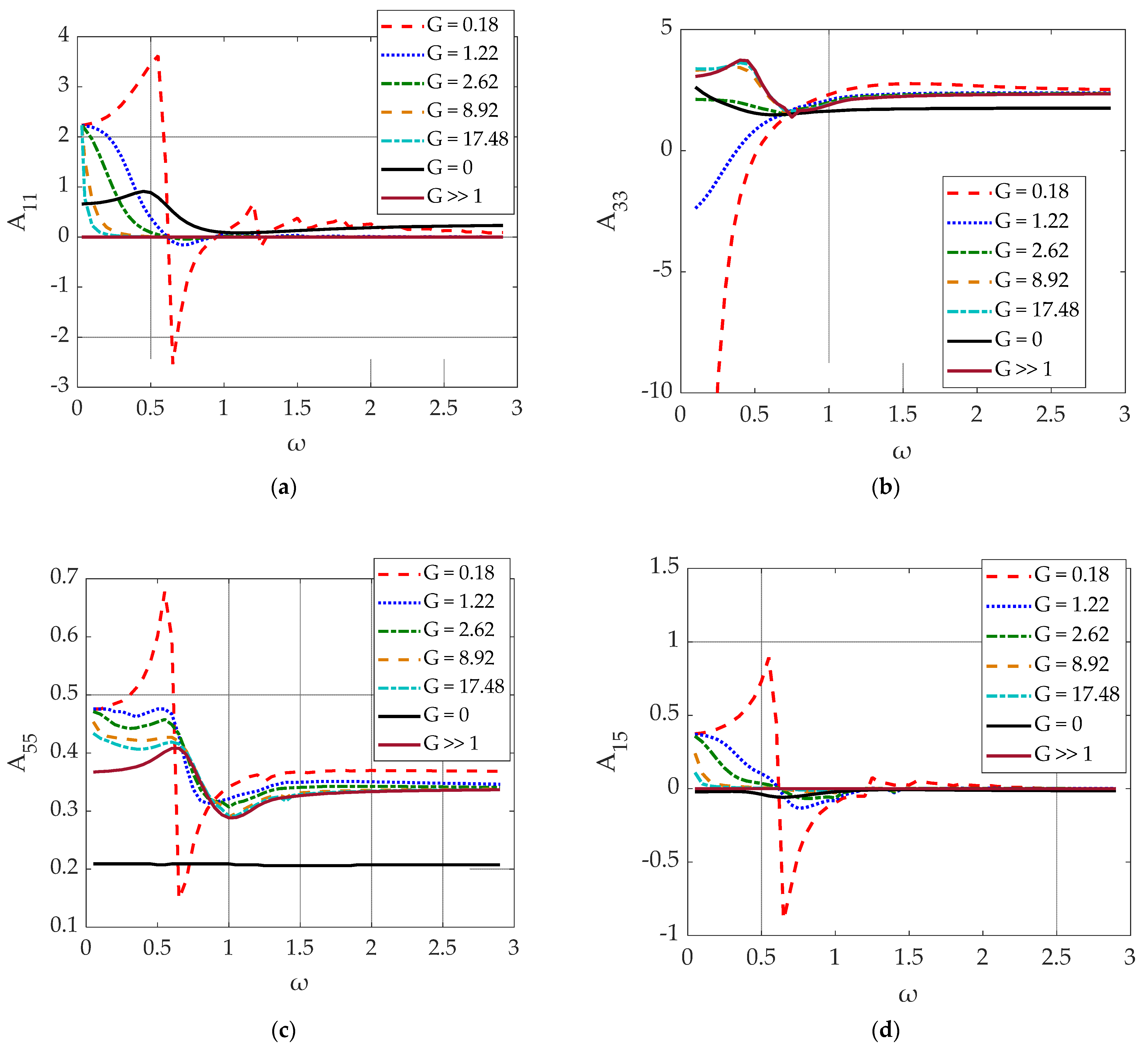
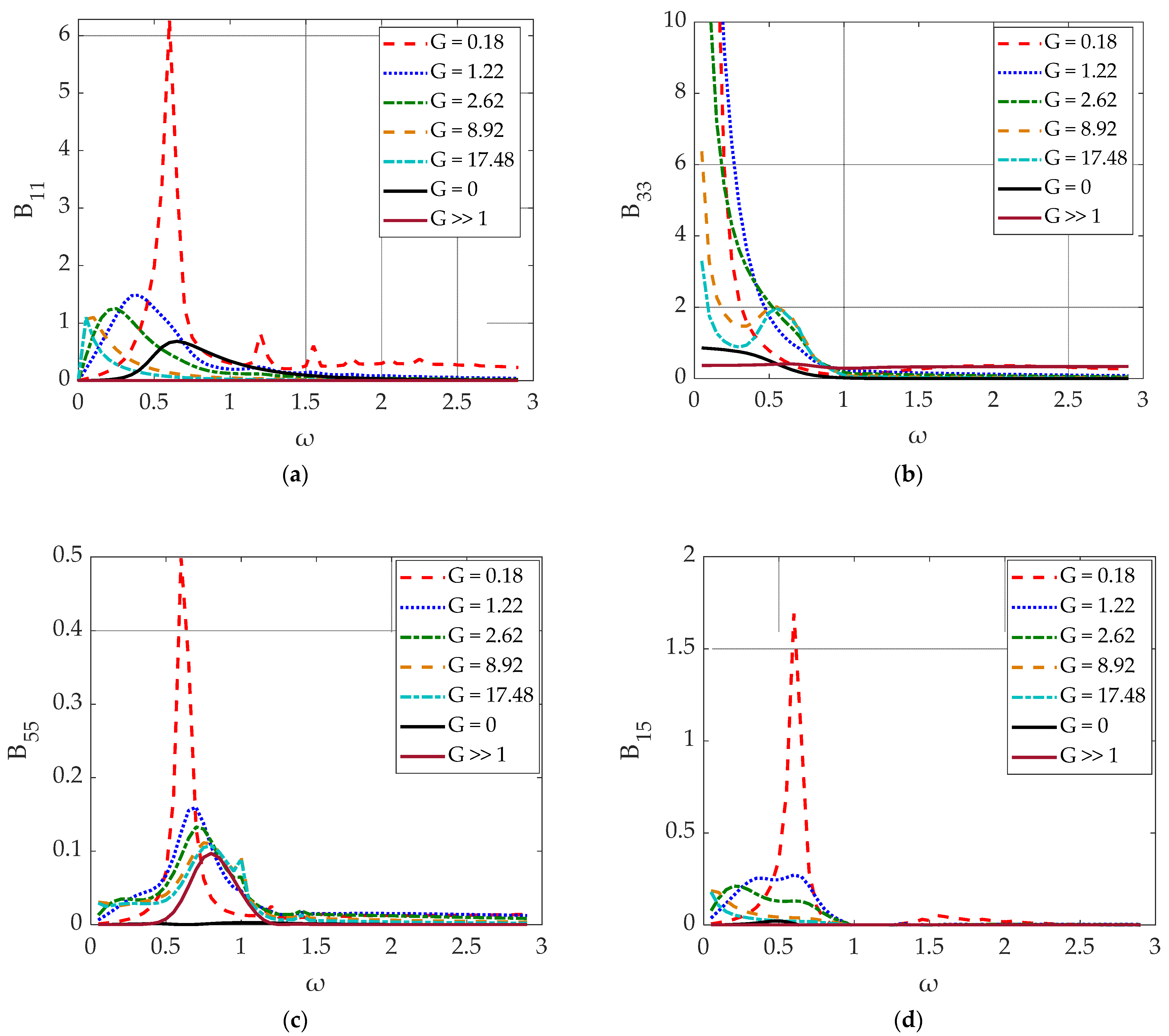
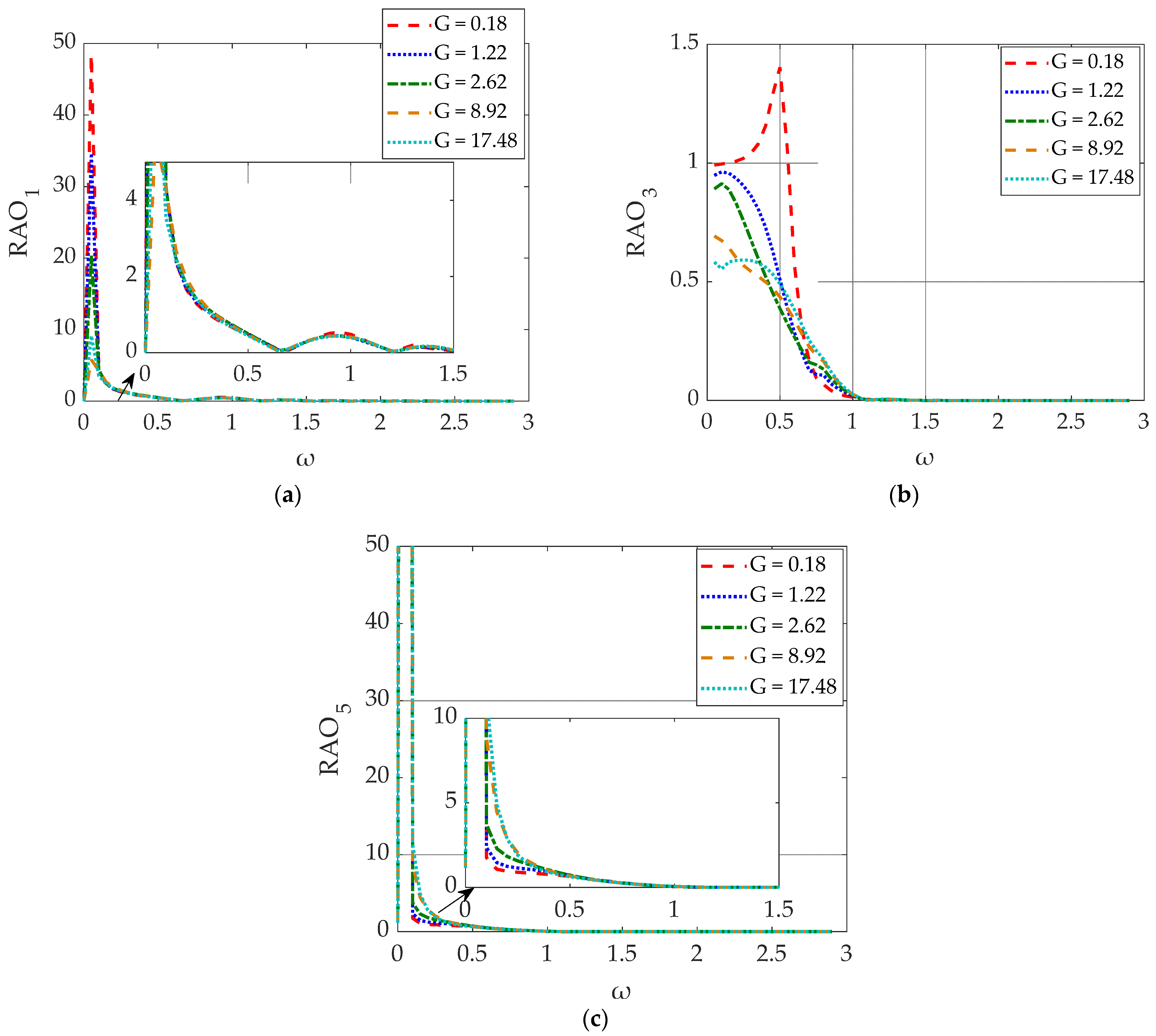
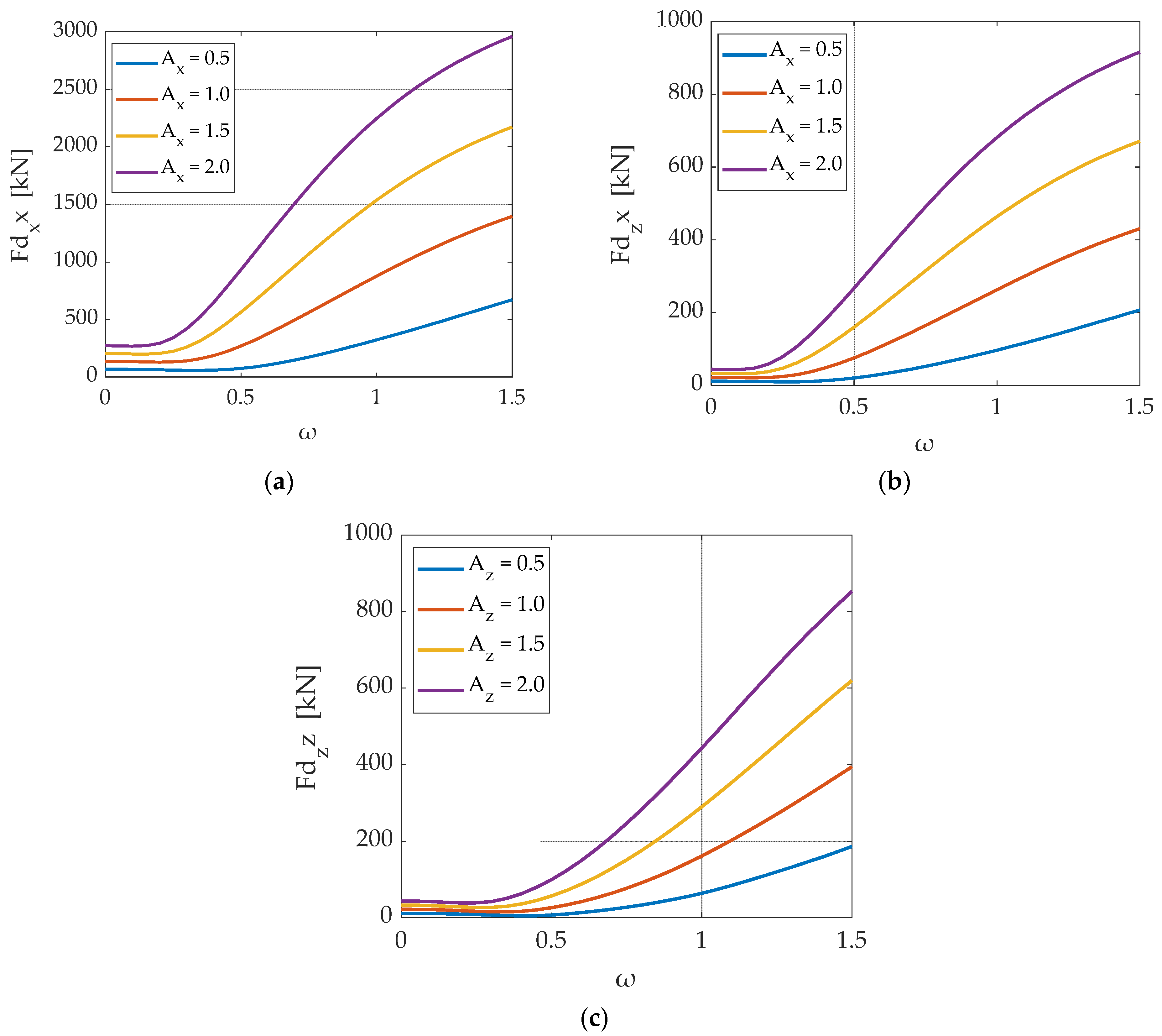
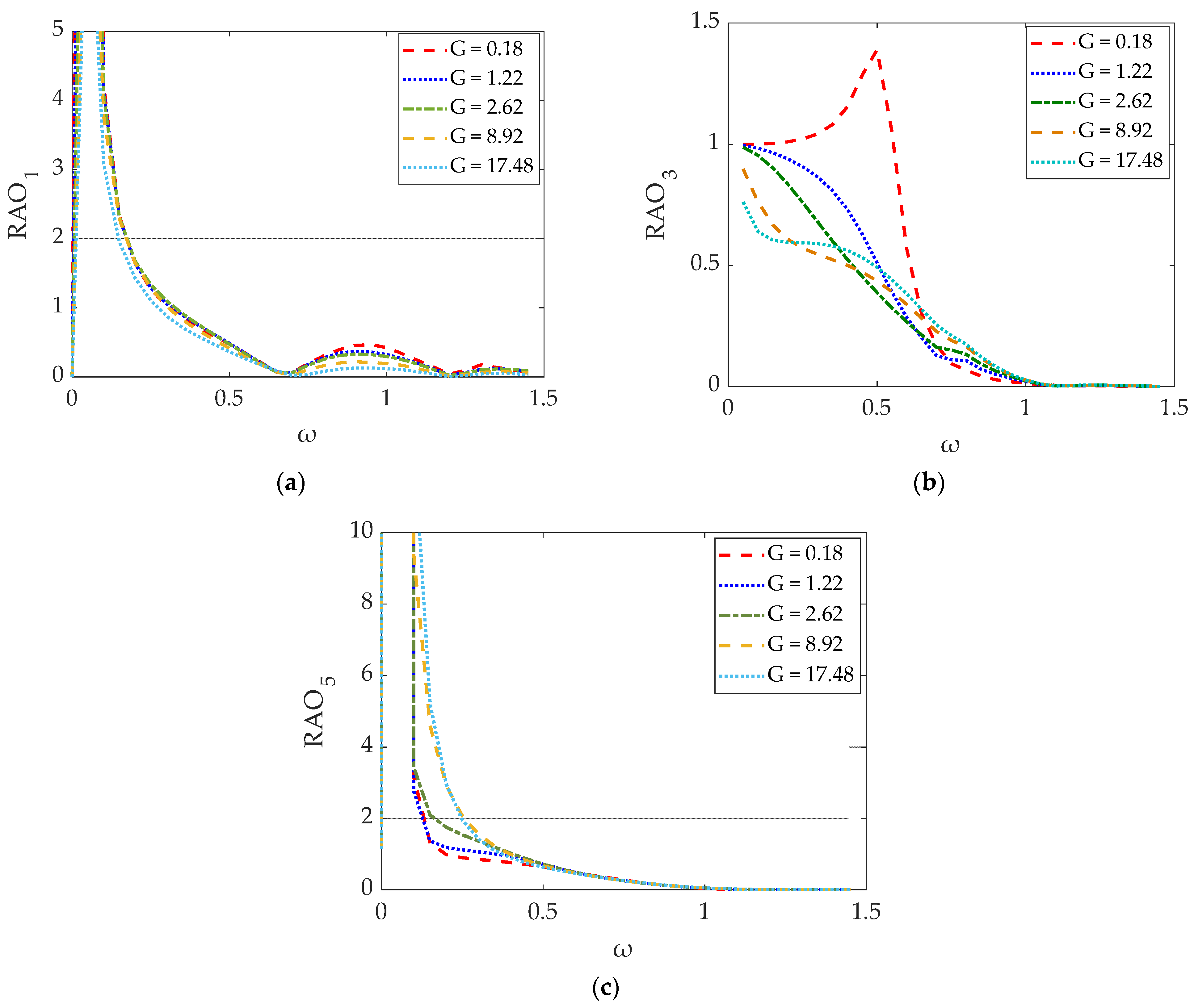
4.2. Numerical Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Sollitt, C.; Cross, R. Wave transmission through permeable breakwaters. In Proceedings of the 13th Coastal Engineering Conference, Vancouver, BC, Canada, 10–14 July 1972; pp. 1827–1846. [Google Scholar]
- Madsen, O. Wave transmission through porous structures. J. Waterw. Ports Coast. Ocean. Eng. Div. 1974, 100, 169–188. [Google Scholar] [CrossRef]
- Solitt, C.; Cross, R. Wave Reflection and Transmission at Permeable Breakwaters; Tech. Paper 76-8; US Army Corps of Engineers, Coastal Engineering Research Center: Fort Belvoir, VA, USA, 1976. [Google Scholar]
- Sulisz, W. Wave reflection and transmission at permeable breakwaters of arbitrary cross section. Coast. Eng. 1985, 9, 371–386. [Google Scholar] [CrossRef]
- Pengzhi, L.; Karunarathna, S. Numerical study of solitary wave interaction with porous breakwaters. J. Waterw. Port Coast. Ocean. Eng. 2007, 133, 352–363. [Google Scholar]
- Huang, Z.; Li, Y.; Liu, Y. Hydraulic performance and wave loadings of perforated/slotted coastal structures: A review. Ocean Eng. 2011, 38, 1031–1053. [Google Scholar] [CrossRef]
- Lan, Y.; Hsu, T.; Lai, J.; Chwang, C.; Ting, C. Bragg scattering of waves propagating over a series of poro-elastic submerged breakwaters. Wave Motion 2011, 48, 1–12. [Google Scholar] [CrossRef]
- Liu, Y.; Li, H.J. Wave reflection and transmission by porous breakwaters: A new analytical solution. Coast. Eng. 2013, 78, 46–52. [Google Scholar] [CrossRef]
- Pereira, E.; The, H.; Manoharan, L.; Lim, C. Design optimization of porous box-type breakwater subjected to regular waves. MATEC Web Conf. 2018, 203, 01018. [Google Scholar] [CrossRef] [Green Version]
- Dai, J.; Wang, C.M.; Utsunomiya, T.; Duan, W. Review of recent research and developments on floating breakwaters. Ocean Eng. 2018, 158, 132–151. [Google Scholar] [CrossRef]
- Han, M.M.; Wang, C.M. Hydrodynamics study on rectangular porous breakwater with horizontal internal water channels. J. Ocean Eng. Mar. Energy 2020, 6, 377–398. [Google Scholar] [CrossRef]
- Kawakami, T. The theory of designing and testing fishing nets in model. In Modern Fishing Gear of the World (2); Fishing News (Books) Ltd.: London, UK, 2006; pp. 471–481. [Google Scholar]
- Aarsnes, J.V.; Rudi, H.; Loland, G. Current forces on cage, net deflection. Engineering for offshore fish farming. In Proceedings of the a Conference Organized by the Institution of Civil Engineers, Glasgow, UK, 17–18 October 1990. [Google Scholar]
- Bessonneau, J.S.; Marichal, D. Study of the dynamics of submerged supple nets (applications to trawls). Ocean. Eng. 1998, 25, 563–583. [Google Scholar] [CrossRef]
- Cho, I.H.; Kim, M.H. Interactions of horizontal porous flexible membrane with waves. J. Waterw. Port Coast. Ocean Eng. 2000, 126, 245–253. [Google Scholar] [CrossRef]
- Chan, A.; Lee, S.W.C. Wave characteristics past a flexible fishnet. Ocean Eng. 2001, 28, 1517–1529. [Google Scholar] [CrossRef]
- Wan, R.; Hu, F.; Tokai, T. A static analysis of the tension and configuration of submerged plane nets. Fish. Sci. 2002, 68, 815–823. [Google Scholar] [CrossRef]
- Tagaki, T.; Suzuki, K.; Hiraishi, T. Development of the numerical simulation method of dynamic fishing net shape. Nippon Suisan Gakkaishi 2002, 68, 320–326. [Google Scholar] [CrossRef] [Green Version]
- Fredheim, A.; Faltinsen, O.M. Hydroelastic analysis of a fishing net in steady inflow conditions. In Proceedings of the 3rd International Conference on Hydroelasticity in Marine Technology 2003, Oxford, UK, 15–17 September 2003. [Google Scholar]
- Bao, W.; Kinoshita, T.; Zhao, F. Wave forces acting on a semi-submerged porous circular cylinder. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2009, 223, 349–360. [Google Scholar] [CrossRef]
- Faltinsen, O.M. Hydrodynamic aspects of a floating fish farm with circular collar. In Proceedings of the 26th International Workshop on Water Waves and Floating Bodies (IWWWFB 2011), Athens, Greece, 17–20 April 2011. [Google Scholar]
- Kristiansen, T.; Faltinsen, O.M. Modelling of current loads on aquaculture net cages. J. Fluids Struct. 2012, 34, 218–235. [Google Scholar] [CrossRef]
- Kristiansen, T.; Faltinsen, O.M. Experimental and numerical study of an aquaculture net cage with floater in waves and current. J. Fluids Struct. 2015, 54, 1–26. [Google Scholar] [CrossRef] [Green Version]
- Shen, Y.G.; Greco, M.; Faltinsen, O.M.; Nygaard, I. Numerical and experimental investigations on mooring loads of a marine fish farm in waves and current. J. Fluids Struct. 2018, 79, 115–136. [Google Scholar] [CrossRef]
- Ito, S.; Kinoshita, T.; Bao, W. Hydrodynamic behaviors of an elastic net structure. Ocean Eng. 2014, 92, 188–197. [Google Scholar] [CrossRef]
- Mandal, S.; Sahoo, T. Wave interaction with floating flexible circular cage system. In Proceedings of the 11th International Conference on Hydrodynamics (ICHD 2014), Singapore, 19–24 October 2014. [Google Scholar]
- Su, W.; Zhan, J.M.; Huang, H. Wave interactions with a porous and flexible cylindrical fish cage. Procedia Eng. 2015, 126, 254–259. [Google Scholar] [CrossRef] [Green Version]
- Ma, M.; Zhang, H.; Jeng, D.S.; Wang, C.M. A semi-analytical model for studying hydroelastic behaviour of a cylindrical net cage under wave action. J. Mar. Sci. Eng. 2021, 9, 1445. [Google Scholar] [CrossRef]
- Liu, Z.; Mohapatra, S.C.; Guedes Soares, C. Finite element analysis of the effect of currents on the dynamics of a moored flexible cylindrical net cage. J. Mar. Sci. Eng. 2021, 9, 159. [Google Scholar] [CrossRef]
- Ma, M.; Zhang, H.; Jeng, D.S.; Wang, C.M. Analytical solutions of hydroelastic interactions between waves and submerged open-net fish cage modeled as a porous cylindrical thin shell. Phys. Fluids 2022, 34, 017104. [Google Scholar] [CrossRef]
- Williams, A.N.; Li, W. Water wave interaction with an array of bottom-mounted surface-piercing porous cylinders. Ocean Eng. 2000, 27, 841–866. [Google Scholar] [CrossRef]
- Williams, A.N.; Li, W.; Wang, K.H. Water wave interaction with a floating porous cylinder. Ocean Eng. 2000, 27, 1–28. [Google Scholar] [CrossRef]
- Park, M.S.; Koo, W.; Choi, Y. Hydrodynamic interaction with an array of porous circular cylinders. Int. J. Nav. Archit. Ocean Eng. 2010, 2, 146–154. [Google Scholar] [CrossRef] [Green Version]
- Zhao, F.; Bao, W.; Kinoshita, T.; Itakura, H. Theoretical and experimental study on a porous cylinder floating in waves. ASME J. Offshore Mech. Arct. Eng. 2011, 133, 011301. [Google Scholar] [CrossRef]
- Zhao, F.; Kinoshita, T.; Bao, W.G.; Huang, L.Y.; Liang, Z.; Wan, R. Interaction between waves and an array of floating porous circular cylinders. China Ocean Eng. 2012, 26, 397–412. [Google Scholar] [CrossRef]
- Park, M.S.; Koo, W. Mathematical modeling of partial-porous circular cylinders with water waves. Hindawio Publishing Corporation. Math. Probl. Eng. 2015, 2015, 903748. [Google Scholar] [CrossRef]
- Dokken, J.; Grue, J.; Karstensen, P. Wave analysis of porous geometry with linear resistance law. J. Mar. Sci. Appl. 2017, 16, 480–489. [Google Scholar] [CrossRef] [Green Version]
- Dokken, J.; Grue, J.; Karstensen, P. Wave forces on porous geometries with linear and quadratic pressure-velocity relations. In Proceedings of the 32nd International Workshop on Water Waves and Floating Bodies, IWWWFB, Dalian, China, 23–26 April 2017. [Google Scholar]
- Cong, P.; Bai, W.; Teng, B. Analytical modeling of water wave interaction with bottom-mounted surface-piercing porous cylinder in front of a vertical wall. J. Fluids Struct. 2019, 88, 292–314. [Google Scholar] [CrossRef]
- Qiao, D.; Mackay, E.; Yan, J.; Feng, C.; Li, B.; Feichtner, A.; Ning, D.; Johanning, L. Numerical simulation with a macroscopic CFD method and experimental analysis of wave interaction with fixed porous cylinder structures. Mar. Struct. 2021, 80, 103096. [Google Scholar] [CrossRef]
- Kokkinowrachos, K.; Mavrakos, S.A.; Asorakos, S. Behavior of vertical bodies of revolution in waves. Ocean Eng. 1986, 13, 505–538. [Google Scholar] [CrossRef]
- Konispoliatis, D.; Chatjigeorgiou, I.; Mavrakos, S. Theoretical hydrodynamic analysis of a surface-piercing porous cylindrical body. Fluids 2021, 6, 320. [Google Scholar] [CrossRef]
- Sankar, A.; Bora, S.N. Hydrodynamic coefficients for a floating semi-porous compound cylinder in finite ocean depth. Mar. Syst. Ocean Technol. 2020, 15, 270–285. [Google Scholar] [CrossRef]
- Sankar, A.; Bora, S.N. Hydrodynamic forces and moments due to interaction of linear water waves with truncated partial-porous cylinders in finite depth. J. Fluids Struct. 2020, 94, 120898. [Google Scholar]
- Abramowitz, M.; Stegun, I.A. Handbook of Mathematical Functions, 9th ed.; Dover Publication: Washington, DC, USA, 1970. [Google Scholar]
- Mavrakos, S.A.; Chatjigeorgiou, I.K. Mooring-induced damping on floating structures. In Proceedings of the 1st International Conference on Marine Industry, Varna, Bulgaria, 2–7 June 1996; Volume II, pp. 365–378. [Google Scholar]
- Triantafyllou, M.S. Preliminary design of mooring systems. J. Ship Res. 1982, 26, 25–35. [Google Scholar] [CrossRef]
- Triantafyllou, M.S.; Bliek, A.; Shin, H. Static and Fatigue Analysis of Multi-Leg Mooring Systems; Technical report; MIT Press: Cambridge, MA, USA, 1986. [Google Scholar]
- Amaechi, C.V.; Wang, F.; Ye, J. Numerical studies on CALM buoy motion responses and the effect of buoy geometry cum skirt dimensions with its hydrodynamic waves—Current interactions. Ocean. Eng. 2022, 244, 110378. [Google Scholar] [CrossRef]
- Loukogeorgaki, E.; Angelides, D. Stiffness of mooring lines and performance of floating breakwater in three dimensions. Appl. Ocean Res. 2005, 27, 187–208. [Google Scholar] [CrossRef]
- Mavrakos, S.A. User’s manual for the computer code HAMVAB. In Laboratory for Floating Bodies and Mooring Systems; National Technical University of Athens: Athens, Greece, 2001. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Submerged weight per unit length | 415.25 N/m | |
| Line diameter | 0.1 m | |
| Mooring length | 700 m | |
| Axial stiffness | 1.293 × 109 N | |
| Horizontal environmental force | 300 × 103 N | |
| Bottom seated mooring length | 79.11 m | |
| 780 × 103 N | ||
| 258 × 103 N | ||
| Horizontal projection of the suspended mooring line length | 610.5 m | |
| Mooring stiffness in x-direction due to the unit translational motion of its attachment point in the x-direction | 135.9 kN/m | |
| Mooring stiffness in y-direction due to the unit translational motion of its attachment point in the y-direction | 1.27 kN/m | |
| Mooring stiffness in z-direction due to the unit translational motion of its attachment point in the z-direction | 4.84 kN/m | |
| Mooring stiffness in x-direction due to the unit translational motion of its attachment point in the z-direction | 21.87 kN/m |
| Line 1 | Line 2 | Line 3 | Line 4 | |
|---|---|---|---|---|
| 0 | /2 | /2 | ||
| 35 | 0 | −35 | 0 | |
| 0 | 0 | 0 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Konispoliatis, D.N.; Chatjigeorgiou, I.K.; Mavrakos, S.A. Hydrodynamics of a Moored Permeable Vertical Cylindrical Body. J. Mar. Sci. Eng. 2022, 10, 403. https://doi.org/10.3390/jmse10030403
Konispoliatis DN, Chatjigeorgiou IK, Mavrakos SA. Hydrodynamics of a Moored Permeable Vertical Cylindrical Body. Journal of Marine Science and Engineering. 2022; 10(3):403. https://doi.org/10.3390/jmse10030403
Chicago/Turabian StyleKonispoliatis, Dimitrios N., Ioannis K. Chatjigeorgiou, and Spyros A. Mavrakos. 2022. "Hydrodynamics of a Moored Permeable Vertical Cylindrical Body" Journal of Marine Science and Engineering 10, no. 3: 403. https://doi.org/10.3390/jmse10030403
APA StyleKonispoliatis, D. N., Chatjigeorgiou, I. K., & Mavrakos, S. A. (2022). Hydrodynamics of a Moored Permeable Vertical Cylindrical Body. Journal of Marine Science and Engineering, 10(3), 403. https://doi.org/10.3390/jmse10030403