
A Risk-Based Model Using Communication Distance Reduction for the Assessment of Underwater Continuous Noise: An Application to the Bottlenose Dolphin (Tursiops truncatus) Inhabiting the Spanish North Atlantic Marine Demarcation

 , ,
, ,  and
and 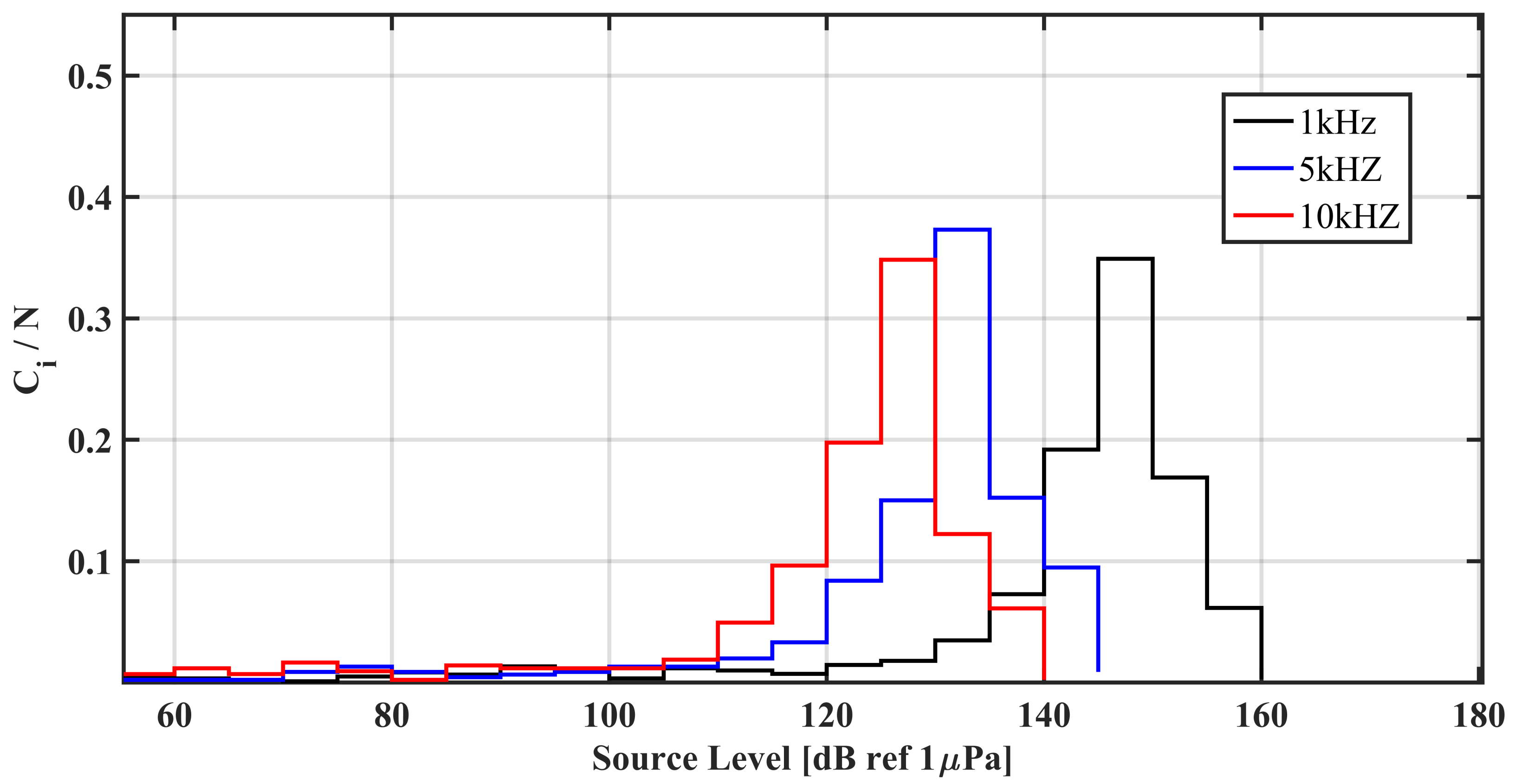{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Risk identification. The main aim of the risk-based model is to measure, in a quantitative way, the risk of masking for cetacean species due to the radiated low-frequency noise produced by marine traffic.
- Risk analysis. Risk analysis takes into account the human pressure produced on the marine environment due to marine traffic and the density of animals able to be used as a proxy to infer the probability of the masking effect appearance.
- Risk evaluation. The risk evaluation is probably the most controversial issue since usually the data used to feed the models in marine sciences are tentative, qualitative, or just missing, depending on the case. Despite these difficulties, there is a need to forecast the potential adverse impact on marine ecosystems caused by human activities. This is an important aspect to cover by competent authorities with the aim to define better strategies to manage anthropic tasks in the sea. The present methodology seeks to infer the probability of masking effect in relation to communication among individuals. The risk assessment process through the presented model allows detection of the potentially acoustic degraded zones, as well as monitoring the need or the influence of mitigation measurements on the marine traffic activity.
2. Material and Methods
2.1. Risk Identification
2.2. Risk Analysis
2.2.1. Underwater Noise Modeling
- The characteristics of ships as noise sources (source level, spectral components, and directivity).
- The environmental conditions that determine the seasonal variation of the speed of sound in the water column, because the sound speed profile determines the geometry of noise propagation through the medium.
- The bathymetry and sea-bottom properties.
- The implementation of a propagation model with affordable computational costs and suitable prediction accuracy.
- Quality cuts and snapshot definition. The starting point of sound map estimation is related to the application of quality cuts over the AIS raw data. Quality cuts consist of applying a filtering process to neglect missing and NaN values present in the variables used to calculate the source level emitted by each ship. Once the data are filtered, a snapshot of 1 h is considered for each day. To obtain this temporary segmentation, a second filter is applied to the Maritime Mobile Service Identity (MMSI) variable, ensuring that each ship is counted only once for each date interval. MMSI is a unique nine digit number for identifying a ship.
- Calculation of source level emitted by the selected ships. The SPL radiated by each of the considered ships was calculated using the Randi model [34]. To apply this model, aspects such as speed over ground, longitude, latitude, and length of the ships must be known. These data were extracted from AIS raw data for the entire year 2019. The Randi model offers the distribution of source-level values for each frequency considered (see Figure 1).
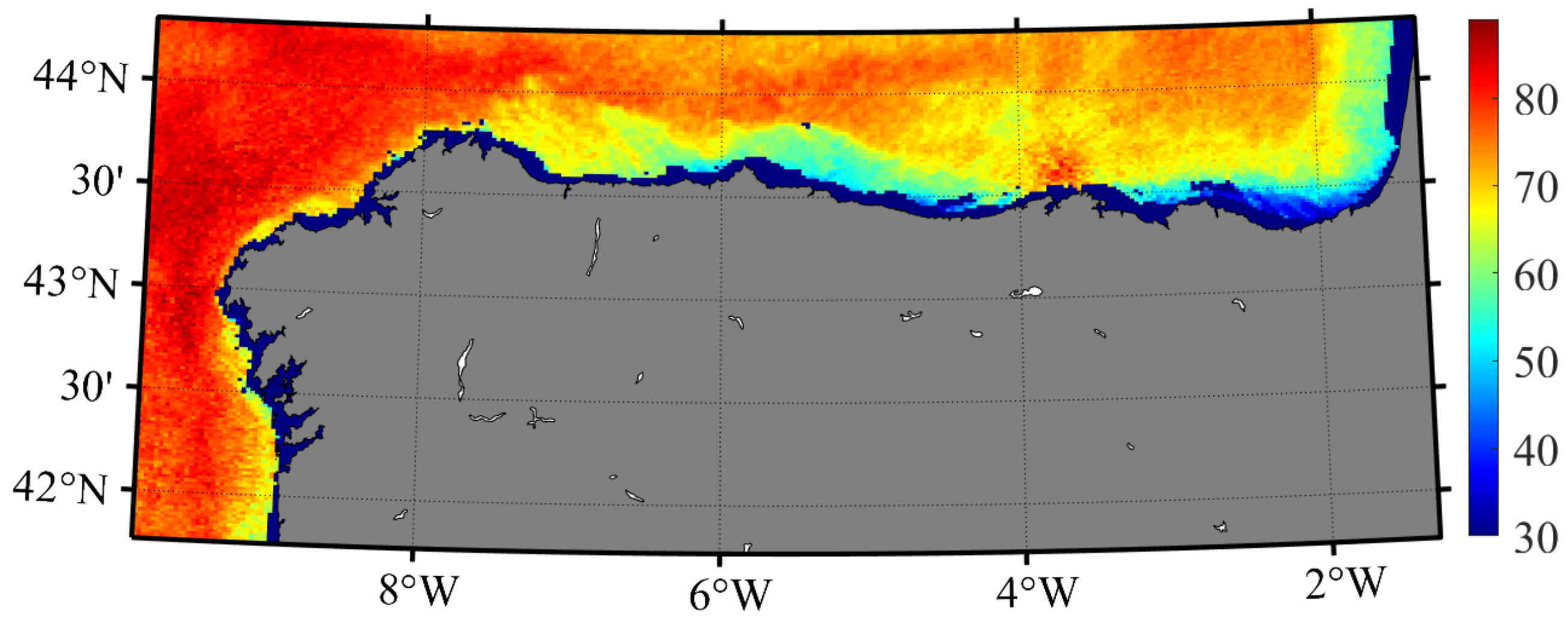
- Propagation of sound through the medium. Once the source levels associated with the specific frequency for each ship are calculated, the propagation of sound must be computed. There are different types of models and different theories for calculating the transmission loss (TL) (TL: describes the attenuation of sound as it propagates through a medium, ), and their suitability traditionally depends on the frequency range considered (high, medium, low) and on the depth (deep water or shallow water) [35]. Traditionally, the application of parabolic equation [36] is accepted for low-frequency and shallow-water environments. In the case presented, the frequencies are equal to or greater than 1 kHz, and a model based on ray theory [37] has been applied. The implemented model is based on the BELLHOP [38] open-source algorithm, applied ship by ship. One of the main benefits of using this method is linked to the computing resources needed. As the frequency increases, the computational costs do not rise. Moreover, ray-based models can offer a good approximation, even at low frequencies, if the source and the receiver are located at least at half-wavelength above the seabed, as some authors have pointed out [39].It must be underscored that the aim of this work is not to perform a study of different propagation methods but to establish a methodology that combines sound maps related to marine traffic and the population density of marine mammals with the aim to infer the possibility of individuals being affected by masking. The theoretical models of source level and signal propagation applied in this work were validated experimentally in [40].Regarding environmental conditions, seasonal variations in salinity and temperature versus depth have been incorporated into the model since they are known to affect the propagation of sound. Information available on the Emodnet (https://www.emodnet.eu/en, accessed on 16 February 2022) site has been used, specifically data from the apex profiling float located at Lat/Lon 46.237/5.44 operated by BSH—Bundesamt Seeschifffahrt und Hydrographie of Germany. The speed of sound in the water column has been calculated using the Mckenzie equation [41] (see Figure 2). The bathymetry was obtained from the GEBCO portal (https://www.gebco.net/, accessed on 13 January 2022) [42].The propagation of sound performed for each temporal snapshot considers the sound speed profile at the same temporal window. An example of SPL values obtained at 1 kHz frequency band are shown using a sound map representation in Figure 3.
2.2.2. Density of Dolphins
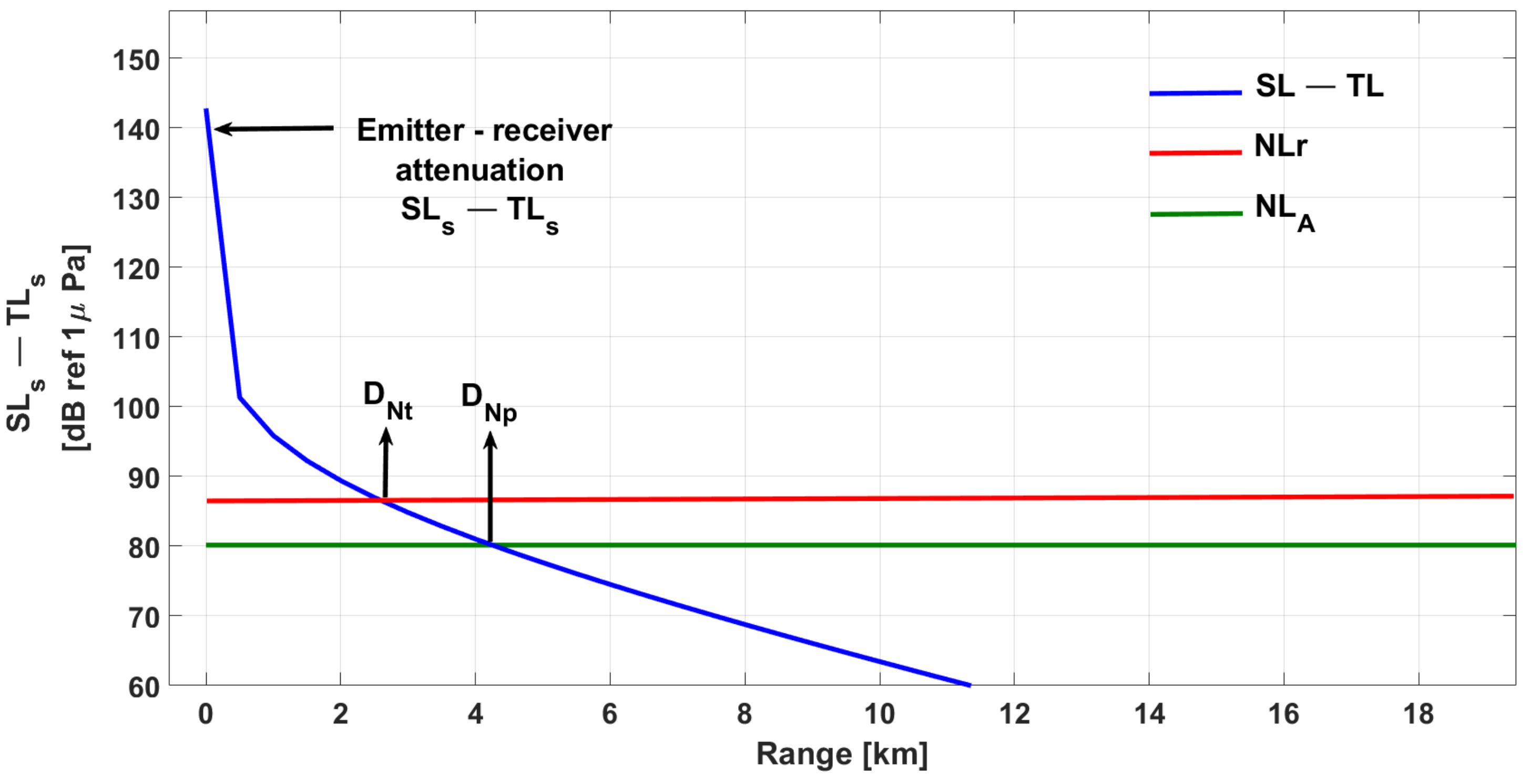
2.2.3. Communication Distance Reduction
- Performing an experimental measurement of ambient noise in a location where ship traffic influence is minimized as much as possible.
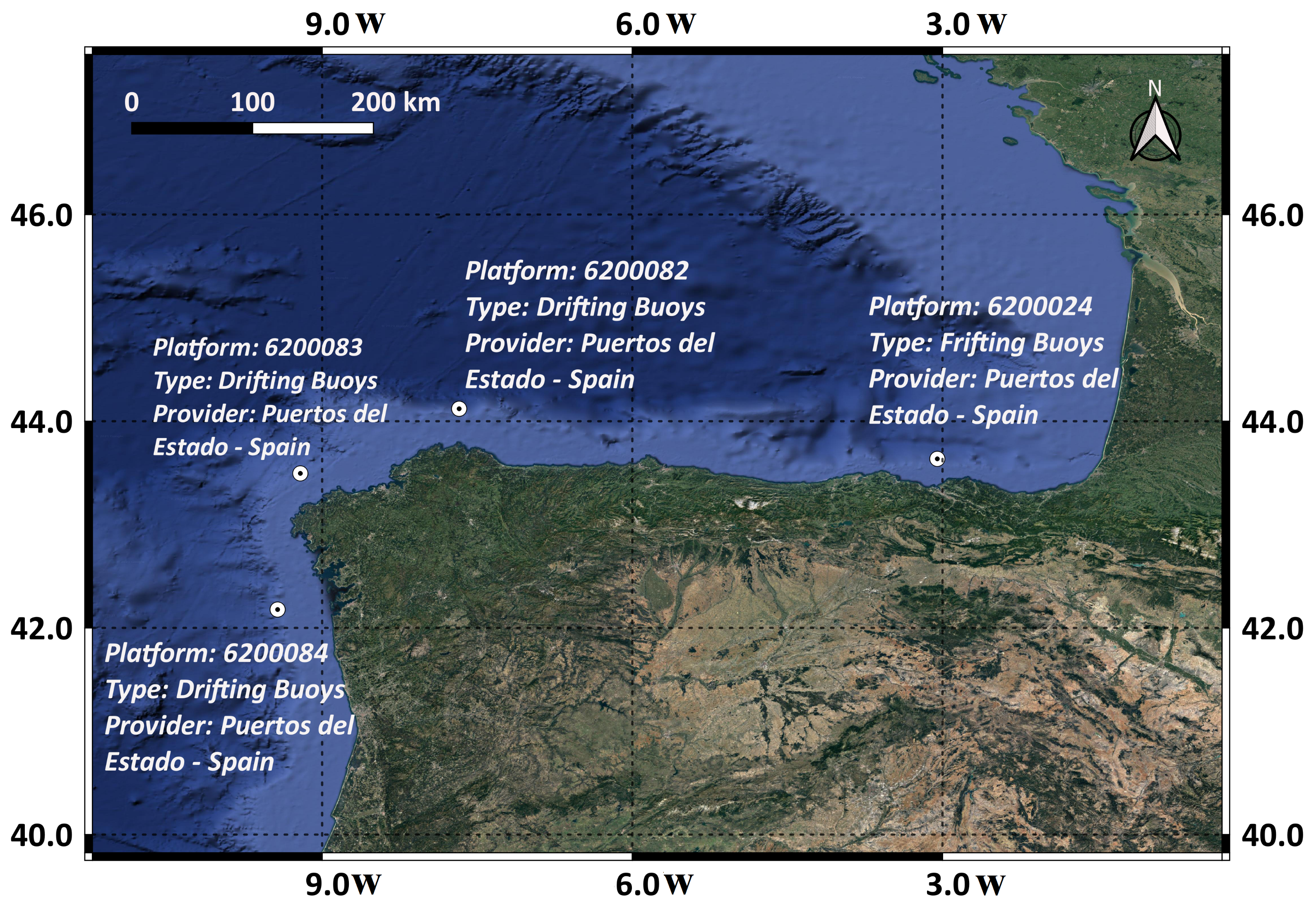
- Developing a theoretical framework to infer the value of natural environmental noise based on meteorological conditions for the same period for which experimental measurements are available.
- Validating the theoretical values for natural ambient noise by means of the experimental data.
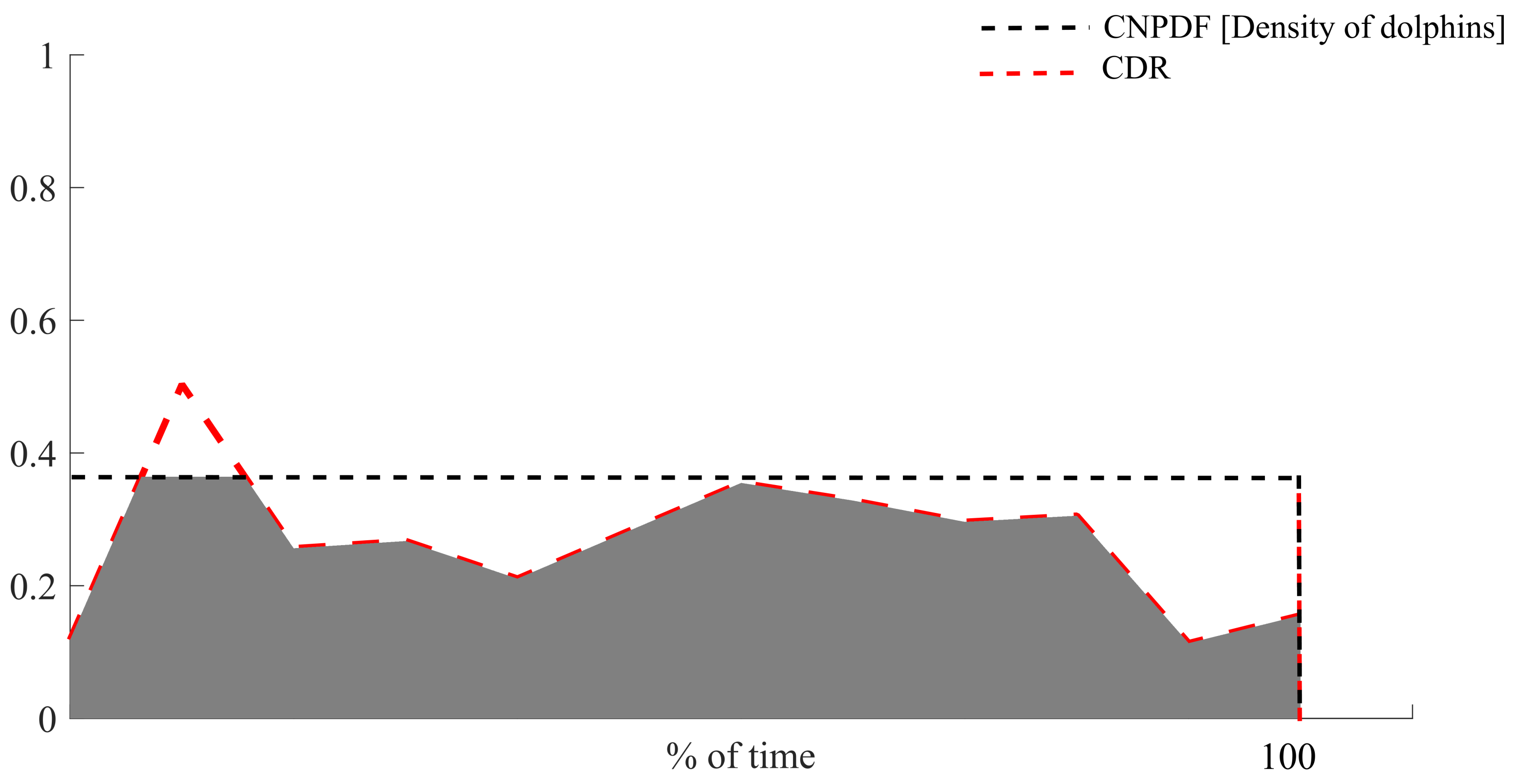
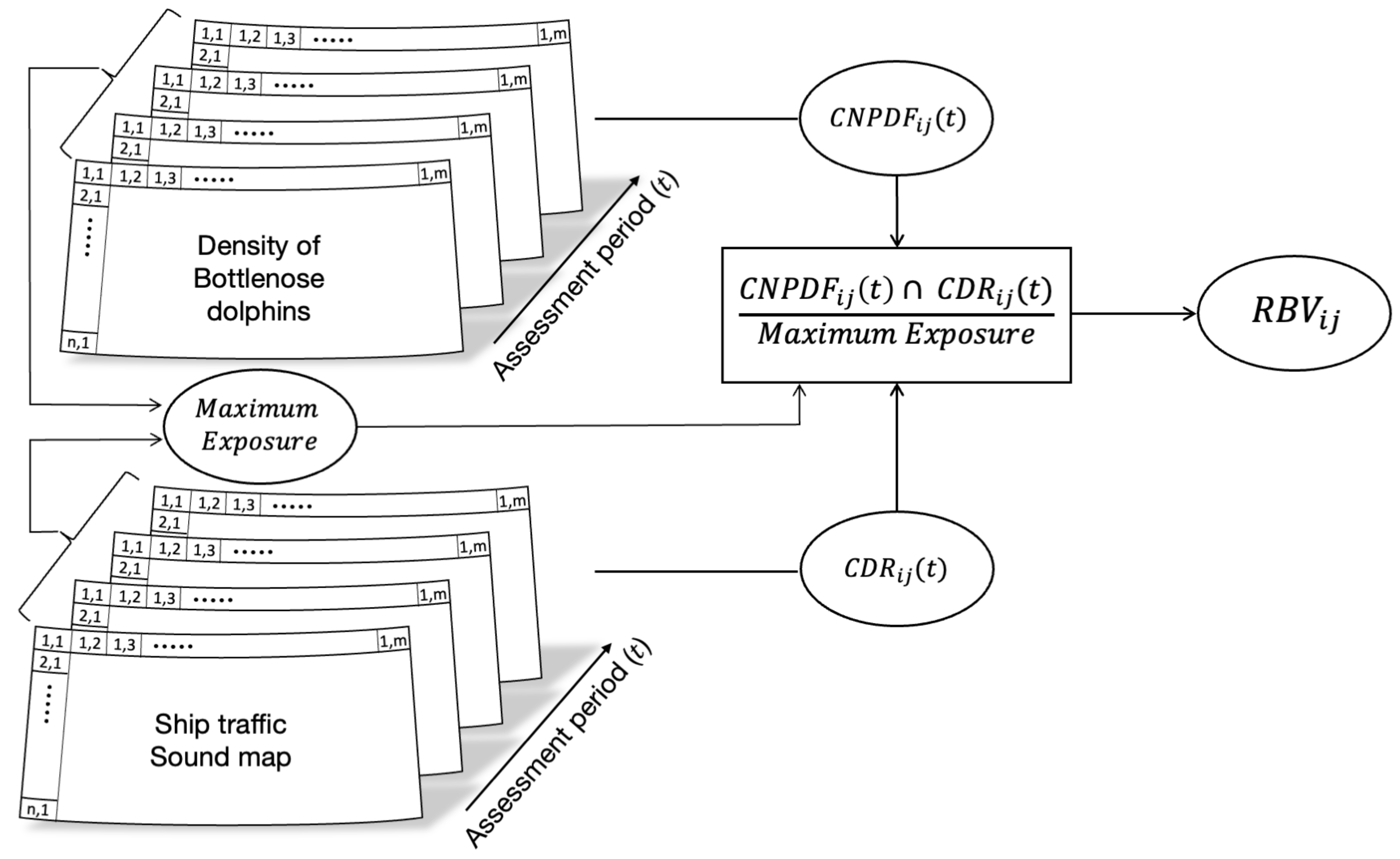
2.2.4. Risk-Based Variable
3. Results and Discussion (Risk Evaluation)
4. Conclusions and Future Work
- A specific ecological interest (e.g., endangered species).
- Its use as a global indicator because it represents a group of species very sensitive to noise.
- The data availability.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- 2017/848; Laying down Criteria and Methodological Standards on Good Environmental Status of Marine Waters and Specifications and Standardised Methods for Monitoring and Assessment, and Repealing Decision 2010/477/EU. Commission Decision (EU), Publications Office of the European Union: Luxembourg, 17 May 2017.
- Protecting Marine Life from Ship Noise. 2018. Available online: https://www.imo.org/en/MediaCentre/Pages/WhatsNew-1105.aspx (accessed on 1 February 2022).
- Kunc, H.P.; McLaughlin, K.E.; Schmidt, R. Aquatic noise pollution: Implications for individuals, populations, and ecosystems. Proc. R. Soc. 2015, B, 12304–12323. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dekeling, R.; Tasker, M.; Van Der Graaf, S.; Ainslie, M.; Andersson, M.; André, M.; Borsani, J.; Brensing, K.; Castellote, M.; Cronin, D.; et al. Monitoring Guidance for Underwater noise in European Seas: Monitoring Guidance specifications, Part II: Monitoring Guidance Specifications. In JRC Scientific and Policy Report EUR 26555; Publications Office of the European Union: Luxembourg, 2015; pp. 1–49. [Google Scholar]
- Medwin, C.C.H. Fundamentals of Acoustical Oceanography; Academic Press: Cambridge, MA, USA, 1997. [Google Scholar]
- Peng, C.; Zhao, X.; Liu, G. Noise in the sea and its impacts on marine organisms. J. Environ. Res. Public Health 2015, 12, 12304–12323. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Williams, R. Impacts of anthropogenic noise on marine life: Publication patterns, new discoveries, and future directions in research and management. Ocean. Coast. Manag. 2015, 115, 17–24. [Google Scholar] [CrossRef] [Green Version]
- Richardson, W.J. Marine Mammals and Noise; Academic Press: Cambridge, MA, USA, 1995. [Google Scholar] [CrossRef]
- National Research Council. Ocean Noise and Marine Mammals; The National Academies Press: Washington, DC, USA, 2003; Volume 12. [Google Scholar] [CrossRef]
- Finneran, J.J. Noise-induced hearing loss in marine mammals: A review of temporary threshold shift studies from 1996 to 2015. J. Acoust. Soc. Am. 2015, 138, 1702–1726. [Google Scholar] [CrossRef] [PubMed]
- Jepson, P.D.; Arbelo, M.; Deaville, R.; Patterson, I.A.; Castro, P. Gas-bubble lesions in stranded cetaceans. Nature 2003, 425, 575–576. [Google Scholar] [CrossRef] [PubMed]
- Erbe, C. Communication masking in marine mammals: A review and research strategy. Mar. Pollut. Bull. 2016, 103, 15–38. [Google Scholar] [CrossRef]
- Wright, A.J.; Soto, N.A.; Baldwin, A.L.; Bateson, M.; Beale, C.M.; Clark, C.; Deak, T.; Edwards, E.F.; Fernández, A.; Godinho, A.; et al. Do Marine Mammals Experience Stress Related to Anthropogenic Noise? Int. Soc. Comp. Psychol. 2007, 20, 274–316. [Google Scholar]
- Weilgart, L.S. The impacts of anthropogenic ocean noise on cetaceans and implications for management. Can. J. Zool. 2007, 85, 1091–1116. [Google Scholar] [CrossRef]
- Rey-Baquero, M.P.; Huertas-Amaya, L.V.; Seger, K.D.; Botero-Acosta, N.; Luna-Acosta, A.; Perazio, C.E.; Boyle, J.K.; Rosenthal, S.; Vallejo, A.C. Understanding Effects of Whale-Watching Vessel Noise on Humpback Whale Song in the North Pacific Coast of Colombia With Propagation Models of Masking and Acoustic Data Observations. Front. Mar. Sci. 2021, 8, 623724. [Google Scholar] [CrossRef]
- Whitlow, W.; Au, L.; Patrick, W.; Moore, B. Critical ratio and critical bandwidth for the Atlantic bottlenose dolphin. J. Acoust. Soc. Am. 1990, 88, 1635–1638. [Google Scholar] [CrossRef]
- Erbe, C. Critical ratios of beluga whales (Delphinapterus leucas) and masked signal duration. J. Acoust. Soc. Am. 2008, 124, 2216–2223. [Google Scholar] [CrossRef] [PubMed]
- Kastelein, R.A. Critical ratios in harbor porpoises (Phocoena phocoena) for tonal signals between 0.315 and 150 kHz in random Gaussian white noise. J. Acoust. Soc. Am. 2009, 126, 1588–1597. [Google Scholar] [CrossRef] [PubMed]
- Fouda, L.; Wingfield, J.E.; Bailey, H. Dolphins simplify their vocal calls in response to increased ambient noise. Biol. Lett. 2018, 14, 20180484. [Google Scholar] [CrossRef] [Green Version]
- Popov, A.Y.; Supin, V.O.K. Frequency tuning of the dolphin’s hearing as revealed by auditory brain-stem response with notch-noise masking. J. Acoust. Soc. Am. 1997, 102, 795–801. [Google Scholar] [CrossRef] [PubMed]
- Castellote, M.; Clark, C.W.; Lammers, M.O. Acoustic and behavioural changes by fin whales (Balaenoptera physalus) in response to shipping and airgun noise. Biol. Conserv. 2012, 147, 115–122. [Google Scholar] [CrossRef]
- ISO 2018-02; International Standard. Risk Management—Guidelines. 2nd ed. International Standards Organisation: Geneva, Switzerland, 2018.
- Verling, E. Application of a risk-based approach to continuous underwater noise at local and subregional scales for the Marine Strategy Framework Directive. Mar. Policy 2021, 134, 104786. [Google Scholar] [CrossRef]
- Kinneging, N.A.; Tougaard, J. Assessment North Sea. Report of the EU INTERREG Joint Monitoring Programme for Ambient Noise North Sea (Jomopans). 2021, pp. 1–23. Available online: https://northsearegion.eu/media/17013/jomopans_assessment_eiha2021_1.pdf (accessed on 1 February 2022).
- Merchant, N.D.; Faulkner, R.C.; Martinez, R. Marine Noise Budgets in Practice. Conserv. Lett. 2017, 11, 1–8. [Google Scholar] [CrossRef]
- Brill, R.L.; Moore, P.W.; Dankiewicz, L.A. Assessment of dolphin (Tursiops truncatus) auditory sensitivity and hearing loss using jawphones. J. Acoust. Soc. Am. 2001, 109, 1717–1722. [Google Scholar] [CrossRef]
- Jhonson, C.S. Sound detection thresholds in marine mammals. In Marine Bioacoustics; Pergamon Press: Oxford, UK, 1967; pp. 247–260. [Google Scholar]
- Lilly, J.C.; Miller, A. Vocal exchanges between dolphins: Bottlenose dolphins “talk” to each other with whistles, clicks and a variety of other noises. Science 1961, 134, 1873–1876. [Google Scholar] [CrossRef]
- Ding, W.; Wursig, B.; Evans, W.E. Whistles of Bottlenose dolphins: Comparison among populations. Aquat. Mamm. 1995, 21, 65–67. [Google Scholar]
- Díaz, B. Whistle characteristics in free-ranging bottlenose dolphins (Tursiops truncatus) in the Mediterranean Sea: Influence of behaviour. Mamm. Biol. 2011, 76, 180–189. [Google Scholar] [CrossRef]
- Caldwell, M.C.; Caldwell, D.K. The whistle of the Atlantic bottlenosed dolphin (Tursions-truncatus)-ontogeny. Behav. Mar. Anim. 1979, 3, 369–401. [Google Scholar]
- Gannier, A.; Fuchs, S.; Quèbre, P.; Oswald, J. Performance of a contour-based classification method for whistles of Mediterranean delphinids. Appl. Acoust. 2010, 71, 1063–1069. [Google Scholar] [CrossRef]
- Schoeman Renée, P.; Patterson-Abrolat Claire, P.S. A Global Review of Vessel Collisions With Marine Animals. Front. Mar. Sci. 2020, 7, 292. [Google Scholar] [CrossRef]
- WP 2: Noise Sources Task T2.1. AQUO Achieve QUieter Oceans by Shipping Noise Footprint Reduction FP7—Collaborative Project n° 314227; European Commission: Brussels, Belgium, 2016. [Google Scholar]
- Wang, L.; Heaney, K.; Pangerc, T.; Theobald, P.; Robinson, S.; Ainslie, M. Review of Underwater Acoustic Propagations Models; NPL Report AC 12; National Physical Laboratory: Teddington, UK, 2014. [Google Scholar]
- Tappert, F.D. The parabolic approximation method. In Wave Propagation and Underwater Acoustics; Keller, J.B., Papadakis, J.S., Eds.; Springer: Berlin/Heidelberg, Germany, 1977; pp. 224–287. [Google Scholar] [CrossRef]
- Clay, C.S.; Medwin, H. Acoustical Oceanography: Principles and Applications; John Wiley and Sons: Hoboken, NJ, USA, 1977. [Google Scholar]
- Porter, M.B.; Liu, Y. Finite Element Ray Tracing. Theor. Comput. Acoust. 1994, 2, 947–956. [Google Scholar]
- Hovem, J.M. Ray Trace Modeling of Underwater Sound Propagation. In Modeling and Measurement Methods for Acoustic Waves and for Acoustic Microdevices; IntechOpen Limited: London, UK, 2013; pp. 573–598. [Google Scholar] [CrossRef] [Green Version]
- Lara, G.; Miralles, R.; Bou-Cabo, M.; Esteban, J.A.; Espinosa, V. New Insights into the Design and Application of a Passive Acoustic Monitoring System for the Assessment of the Good Environmental Status in Spanish Marine Waters. Sensors 2020, 20, 5353. [Google Scholar] [CrossRef]
- Mackenzie, K.V. Nine-term equation for the sound speed in the oceans. J. Acoust. Soc. Am. 1981, 70, 807–812. [Google Scholar] [CrossRef]
- Becker, J.J. Global bathymetry and elevation data at 30 Arc seconds resolution: SRTM30 PLUS. Mar. Geod. 2009, 70, 355–371. [Google Scholar] [CrossRef]
- Buckland, S.T.; Anderson, D.R.; Burnham, K.P.; Laake, J.L.; Borchers, D.L.; Thomas, L. Introduction to Distance Sampling: Estimating Abundance of Biological Populations; Oxford University Press: Oxford, UK, 2001. [Google Scholar]
- 1.6.6.2 OSPAR Request on Indicator Assessment of Coastal Bottlenose Dolphins. Available online: https://www.ices.dk/sites/pub/Publication%20Reports/Advice/2016/Special_Requests/OSPAR_Indicator_assessment_of_coastal_bottlenose_dolphins.pdf (accessed on 10 April 2022).
- Saavedra, C. Assessing the environmental status of the short-beaked common dolphin (Delphinus delphis) in North-western Spanish waters using abundance trends and safe removal limits. Prog. Oceanogr. 2017, 166, 66–75. [Google Scholar] [CrossRef]
- Miller, D.L.; Burt, M.L.; Rexstad, E.A.; Thomas, L. Spatial models for distance sampling data: Recent developments and future directions. Methods Ecol. Evol. 2013, 4, 1001–1010. [Google Scholar] [CrossRef] [Green Version]
- Scott, W.R.S. Bottlenose dolphin, Tursiops truncatus, Common bottlenose dolphin. In Encyclopedia of Marine Mammals, 3rd ed.; Academic Press: San Diego, CA, USA, 2018; pp. 118–125. [Google Scholar]
- Fernández García, R. Ecology of the Bottlenose Dolphin, Tursiops Truncatus (Montagu 1821), in Galician Waters, NW Spain. Ph.D. Thesis, University of Vigo, Vigo, Spain, 2010. [Google Scholar]
- Hammond, P.S.; Lacey, C.; Gilles, A.; Viquerat, S.; Börjesson, P.; Herr, H. Estimates of Cetacean Abundance in European Atlantic Waters in Summer 2016 from the SCANS-III Aerial and Shipboard Surveys; Sea Mammal Research Unit University of St Andrews: St Andrews, UK, 2017; pp. 1–39. [Google Scholar]
- López, A.; Santos, M.B.; Pierce, G.J.; González, Á.F.; Valeiras, X.; Guerra, Á. Trends in strandings and by-catch of marine mammals in north-west Spain during the 1990s. J. Mar. Biol. Assoc. UK 2002, 82, 513–521. [Google Scholar] [CrossRef] [Green Version]
- Papale, E.; Gamba, M.; Perez-Gil, M.; Martin, V.M.; Giacoma, C. Dolphins Adjust Species-Specific Frequency Parameters to Compensate for Increasing Background Noise. PLoS ONE 2015, 10, e0121711. [Google Scholar] [CrossRef] [PubMed]
- NOAA Technical Memorandum NMFS-OPR-55. Technical Guidance for Assessing the Effects of Anthropogenic Sound on Marine Mammal Hearing: Underwater Acoustic Thresholds for Onset of Permanent and Temporary Threshold Shifts; United States Department of Commerce: Washington, DC, USA, 2016. [Google Scholar]
- Ainslie, M.A. Principles of Sonar Performance Modelling; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Clark, C.W.; Ellison, W.T.; Southall, B.L.; Hatch, L.; Van Parijs, S.M.; Frankel, A.; Ponirakis, D. Acoustic masking in marine ecosystems. Intuitions, analysis and implications. Mar. Ecol. Prog. Ser. 2009, 395, 201–222. [Google Scholar] [CrossRef]
- Au, W.W.; Snyder, K.J. Long-range target detection in open waters by an echolocating Atlantic Bottlenose dolphin (Tursiops truncatus). J. Acoust. Soc. Am. 1980, 68, 201–222. [Google Scholar] [CrossRef]
- Marsh, H.W.; Shulkin, M. Shallow water transmission. J. Acoust. Soc. Am. 1962, 34, 863–864. [Google Scholar] [CrossRef]
- Wenz, G.M. Acoustic Ambient Noise in the Ocean: Spectra and Sources. J. Acoust. Soc. Am. 1962, 34, 1936–1956. [Google Scholar] [CrossRef]
- Frankel, A.S.; Zeddies, D.; Simard, P.; Mann, D. Whistle source levels of free-ranging bottlenose dolphins and Atlantic spotted dolphins in the Gulf of Mexico. J. Acoust. Soc. Am. 2014, 125, 1624–1631. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bou-Cabo, M.; Lara, G.; Gutiérrez-Muñoz, P.; Saavedra, C.; Miralles, R.; Espinosa, V. A Risk-Based Model Using Communication Distance Reduction for the Assessment of Underwater Continuous Noise: An Application to the Bottlenose Dolphin (Tursiops truncatus) Inhabiting the Spanish North Atlantic Marine Demarcation. J. Mar. Sci. Eng. 2022, 10, 605. https://doi.org/10.3390/jmse10050605
Bou-Cabo M, Lara G, Gutiérrez-Muñoz P, Saavedra C, Miralles R, Espinosa V. A Risk-Based Model Using Communication Distance Reduction for the Assessment of Underwater Continuous Noise: An Application to the Bottlenose Dolphin (Tursiops truncatus) Inhabiting the Spanish North Atlantic Marine Demarcation. Journal of Marine Science and Engineering. 2022; 10(5):605. https://doi.org/10.3390/jmse10050605
Chicago/Turabian StyleBou-Cabo, Manuel, Guillermo Lara, Paula Gutiérrez-Muñoz, C. Saavedra, Ramón Miralles, and Víctor Espinosa. 2022. "A Risk-Based Model Using Communication Distance Reduction for the Assessment of Underwater Continuous Noise: An Application to the Bottlenose Dolphin (Tursiops truncatus) Inhabiting the Spanish North Atlantic Marine Demarcation" Journal of Marine Science and Engineering 10, no. 5: 605. https://doi.org/10.3390/jmse10050605
APA StyleBou-Cabo, M., Lara, G., Gutiérrez-Muñoz, P., Saavedra, C., Miralles, R., & Espinosa, V. (2022). A Risk-Based Model Using Communication Distance Reduction for the Assessment of Underwater Continuous Noise: An Application to the Bottlenose Dolphin (Tursiops truncatus) Inhabiting the Spanish North Atlantic Marine Demarcation. Journal of Marine Science and Engineering, 10(5), 605. https://doi.org/10.3390/jmse10050605