
Prediction Method and Validation Study of Tensile Performance of Reinforced Armor Layer in Marine Flexible Pipe/Cables

 ,
, 


 and
and
Abstract
:1. Introduction
2. Structural Characteristics of Reinforced Armor Layer in Marine Flexible Pipe/Cables
- Ignoring the interaction between layers, only one of the armoring layers is taken to conduct the property analysis. The core is an undeformable cylinder.
- The diameter of the helically wound structure is much smaller than that of the core.
- Under the axial load, the section of the deformed structure remains flat.
- The material property of the helically wound structure is isotropic.
- The helically wound structure cannot be affected by the external bending moment per unit length.
3. Theoretical Model of Tensile Behavior of the Helically Wound Structure
3.1. Mechanical Model of Helically Wound Structures
3.2. Theoretical Model of Tensile Mechanical Behavior of Helically Wound Structures with Typical Winding Angles
4. Numerical Simulation Verification Analysis
4.1. Establishing the Numerical Model
4.2. Loads and Boundary Conditions
4.3. Tensile Mechanical Behavior Deformation Mechanism
5. Validation of Model Analysis
5.1. Mechanical Tensile Performance of Helically Wound Structures
5.2. Theory Suitability Analysis
5.3. Error Analysis of Tensile Behavior of Marine Flexible Pipe/Cables
- The normal stress of the umbilical increases by 0.36%, and the shear stress decreases by 50.51%.
- The normal stress of the flexible pipe increases by 0.62%, and the shear stress decreases by 67.62%.
- The normal stress of the cryogenic hose increases by 0.72%, and the shear stress decreases by 8.44%.
6. Conclusions
- A more general method was deduced for different winding angles, which solves the problem of poor applicability of previous theoretical formulas. The theoretical calculation errors of different marine flexible pipe/cables were analyzed, and the theoretical calculation accuracy was improved.
- Under the premise of the same axial strain, the tensile–torsion ratio of different winding angles was analyzed. It was found that with the increase of winding angle, the torsion of the structure gradually replaced the stretch, leading to increased error, so the effect of torsion should be fully considered.
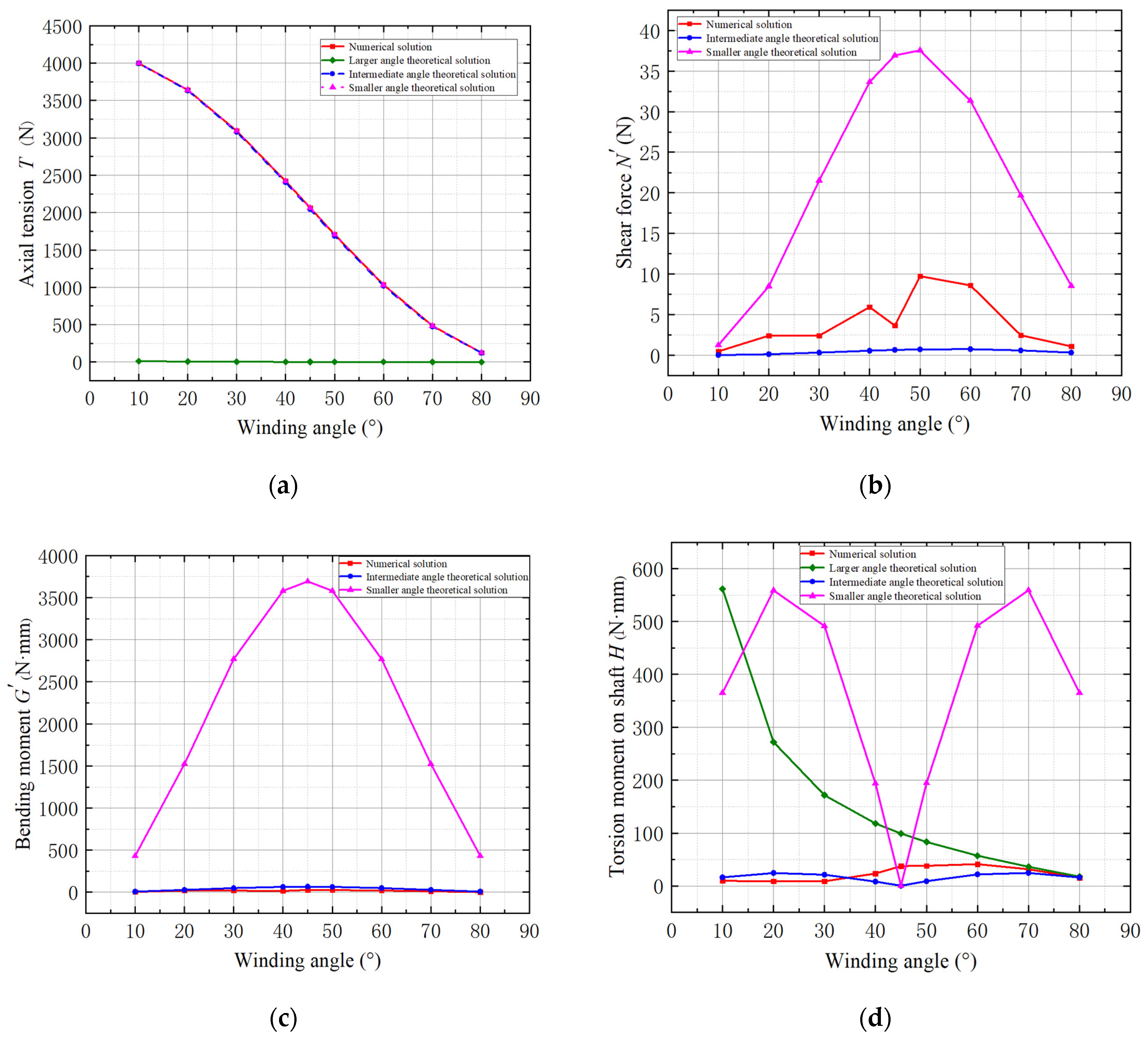
- When the increase of winding angle T decreased linearly, the tensile strength decreased, and the theoretical formulas of , and H had sine and cosine trigonometric functions. Therefore, the calculation results of the complementary winding angles were the same, resulting in a normal distribution of the curves.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Xia, R.; Zhang, X.; Zheng, L.J. Reliability analysis of an umbilical under ultimate tensile load based on response surface approach. Underw. Technol. 2020, 37, 87–93. [Google Scholar]
- Meng, X.B.; Gao, K.; Sun, Y.H. Mathematical modeling and geometric analysis for wire rope strands. Appl. Math. Model. 2015, 39, 1019–1032. [Google Scholar]
- Xiang, L.; Wang, H.Y.; Chen, Y. Modeling of multi-strand wire ropes subjected to axial tension and torsion loads. Int. J. Solids Struct. 2015, 58, 233–246. [Google Scholar] [CrossRef]
- Inagaki, K.; Ekg, J.; Zahrai, S. Mechanical analysis of second order helical structure in electrical cable. Int. J. Solids Struct. 2007, 44, 1657–1679. [Google Scholar] [CrossRef] [Green Version]
- Usabiaga, H.; Pagalday, J.M. Analytical procedure for modelling recursively and wire by wire stranded ropes subjected to traction and torsion loads. Int. J. Solids Struct. 2008, 45, 5503–5520. [Google Scholar] [CrossRef] [Green Version]
- Hruska, F.H. Radial forces in wire ropes. Wire Wire Prod. 1952, 27, 459–463. [Google Scholar]
- Hruska, F.H. Tangential forces in wire ropes. Wire Wire Prod. 1953, 28, 455–460. [Google Scholar]
- Cardou, A.; Jolicoeur, C. Mechanical models of helical strands. Appl. Mech. Rev. 1997, 50, 1–14. [Google Scholar] [CrossRef]
- Knapp, R.H. Derivation of a new stiffness matrix for helically armoured cables considering tension and torsion. IJNME 1979, 14, 515–529. [Google Scholar] [CrossRef]
- Knapp, R.H. Structural modeling of undersea cables. J. Offshore Mech. Arct. Eng. 1989, 111, 323–330. [Google Scholar] [CrossRef]
- Knapp, R.H. Design methodology for undersea umbilical cables. In Proceedings of the OCEANS 91 Proceedings, Honololu, HI, USA, 1–3 October 1991; pp. 1319–1327. [Google Scholar]
- Feyrer, K. Wire Ropes: Tension, Endurance, Reliability; Springer: Berlin/Heidelberg, Germany, 2007; pp. 1–322. [Google Scholar]
- Liu, Y.W.; Chen, J.B.; Liu, J.G. Nonlinear mechanics of flexible cables in space robotic arms. Orig. Pap. 2018, 94, 649–667. [Google Scholar]
- Lanteigne, J. Theoretical estimation of the response of helically armored cables to tension, torsion, and bending. J. Appl. Mech. 1985, 52, 423–432. [Google Scholar] [CrossRef]
- Li, X.; Liang, L.; Wu, S. Analysis of mechanical behaviors of internal helically wound strand wires of stranded wire helical spring. Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci. 2018, 232, 1009–1019. [Google Scholar] [CrossRef]
- Chang, H.C.; Chen, B.F. Mechanical behavior of submarine cable under coupled tension, torsion and compressive loads. J. Appl. Mech. 2019, 189, 106272. [Google Scholar] [CrossRef]
- Yang, Z.X.; Su, Q.; Yan, J. Study on the nonlinear mechanical behaviour of an umbilical under combined loads of tension and torsion. Ocean Eng. 2021, 238, 109742. [Google Scholar] [CrossRef]
- Tang, M.G.; Yan, J.; Wang, Y. Tensile stiffness analysis on ocean dynamic power umbilical. China Ocean Eng. 2014, 28, 259–270. [Google Scholar] [CrossRef]
- Zhu, X.H.; Lei, Q.L.; Meng, Y. Tensile response of a flexible pipe with an incomplete tensile armor layer. J. Offshore Mech. Arct. Eng. 2021, 143, 1–9. [Google Scholar] [CrossRef]
- Yue, Q.J.; Lu, Q.Z.; Yan, J. Tension behavior prediction of flexible pipelines in shallow water. Ocean Eng. 2013, 58, 201–207. [Google Scholar] [CrossRef]
- Yang, Z.X.; Yan, J.; Chen, J.L. Multi-objective shape optimization design for liquefied natural gas cryogenic helical corrugated steel pipe. J. Offshore Mech. Arct. Eng. 2017, 139, 1–11. [Google Scholar] [CrossRef]
- Love, A.E.H. A Treatise on the Mathematical Theory of Elasticity; Cambridge University Press: Cambridge, UK, 1944; p. 305. [Google Scholar]
- Lemaitre, J.; Chaboche, J.L.; Maji, A.K. Mechanics of solid materials. J. Eng. Mech. 1992, 119, 642–643. [Google Scholar] [CrossRef]
- ABAQUS CAE. Analysis User’s Manual Version 6.12; Dassault Systemes Simulia, Inc.: Johnston, RI, USA, 2012. [Google Scholar]
- Yin, Y.C.; Lu, Q.Z.; Wu, S.H. Experimental study on the interlayer friction and wear mechanism between armor wires of umbilicals. Mar. Struct. 2021, 80, 103102. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elasticity Modulus (MPa) | Poisson’s Ratio | Density (kg·m−3) |
|---|---|---|
| 210,000 | 0.3 | 7800 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Yang, Z.; Yan, J.; Wang, G.; Shi, D.; Zhou, B.; Li, Y. Prediction Method and Validation Study of Tensile Performance of Reinforced Armor Layer in Marine Flexible Pipe/Cables. J. Mar. Sci. Eng. 2022, 10, 642. https://doi.org/10.3390/jmse10050642
Wang H, Yang Z, Yan J, Wang G, Shi D, Zhou B, Li Y. Prediction Method and Validation Study of Tensile Performance of Reinforced Armor Layer in Marine Flexible Pipe/Cables. Journal of Marine Science and Engineering. 2022; 10(5):642. https://doi.org/10.3390/jmse10050642
Chicago/Turabian StyleWang, Hualin, Zhixun Yang, Jun Yan, Gang Wang, Dongyan Shi, Baoshun Zhou, and Yanchun Li. 2022. "Prediction Method and Validation Study of Tensile Performance of Reinforced Armor Layer in Marine Flexible Pipe/Cables" Journal of Marine Science and Engineering 10, no. 5: 642. https://doi.org/10.3390/jmse10050642
APA StyleWang, H., Yang, Z., Yan, J., Wang, G., Shi, D., Zhou, B., & Li, Y. (2022). Prediction Method and Validation Study of Tensile Performance of Reinforced Armor Layer in Marine Flexible Pipe/Cables. Journal of Marine Science and Engineering, 10(5), 642. https://doi.org/10.3390/jmse10050642