
Bioinspired Central Pattern Generator and T-S Fuzzy Neural Network-Based Control of a Robotic Manta for Depth and Heading Tracking



Abstract
:1. Introduction
2. The Design of the Robotic Manta
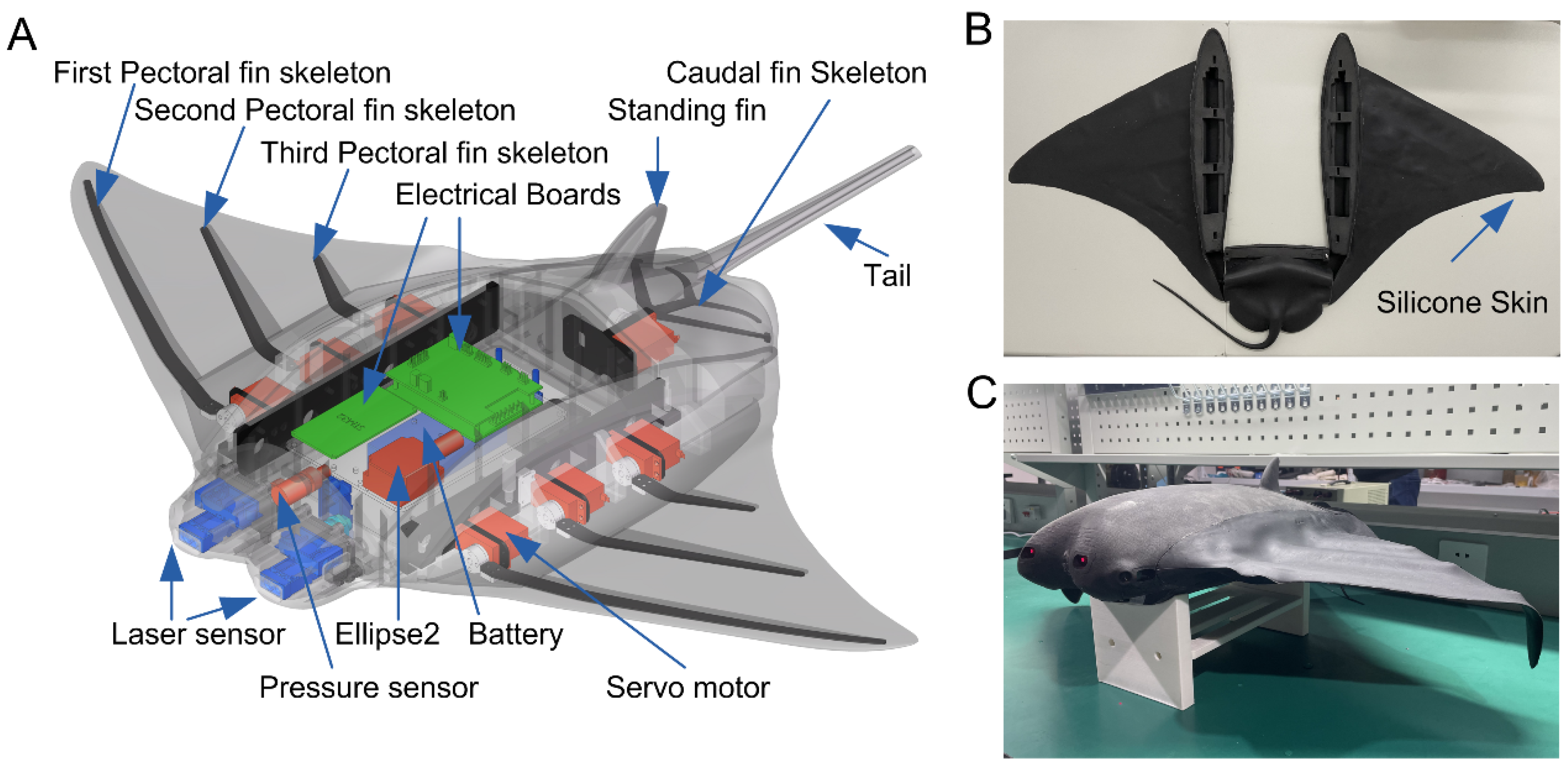
2.1. Overview of Mechanical Structure and Electronic Design
2.2. Basic Forms for the Movement of the Pectoral and Caudal Fins
3. Methods
3.1. Design of CPG-Driven Network
3.2. Design of T-S Based Fuzzy Neural Network Controller
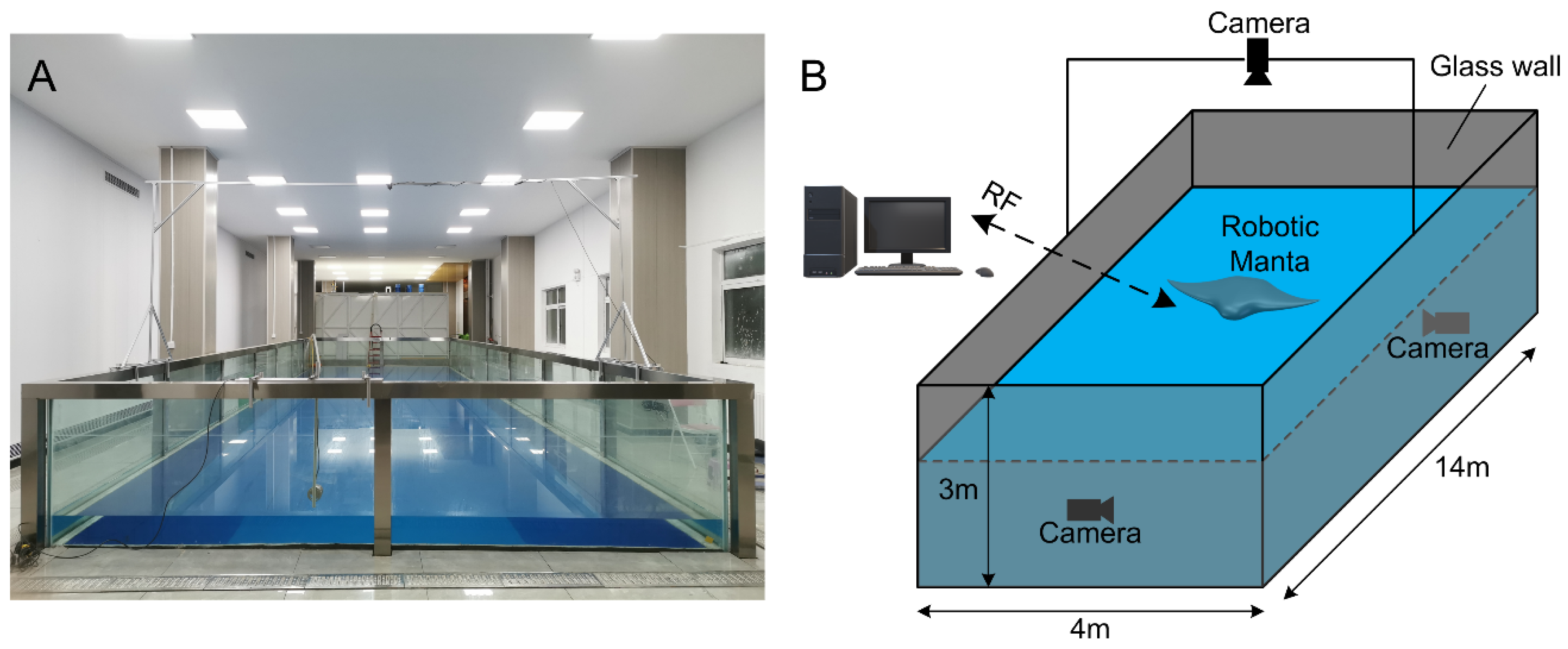
4. Experiments
4.1. Depth Control Experiments
4.2. Heading Control Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Vu, M.T.; Le, T.H.; Thanh, H.L.N.N.; Huynh, T.T.; Van, M.; Hoang, Q.D.; Do, T.D. Robust position control of an over-actuated underwater vehicle under model uncer-tainties and ocean current effects using dynamic sliding mode surface and optimal allocation control. Sensors 2021, 21, 747. [Google Scholar] [CrossRef] [PubMed]
- Vu, M.T.; Le Thanh, H.N.N.; Huynh, T.-T.; Thang, Q.; Duc, T.; Hoang, Q.-D.; Le, T.-H. Station-Keeping Control of a Hovering Over-Actuated Autonomous Underwater Vehicle Under Ocean Current Effects and Model Uncertainties in Horizontal Plane. IEEE Access 2021, 9, 6855–6867. [Google Scholar] [CrossRef]
- Yuh, J. Design and Control of Autonomous Underwater Robots: A Survey. Auton. Robot. 2000, 8, 7–24. [Google Scholar] [CrossRef]
- Alam, K.; Ray, T.; Anavatti, S.G. A brief taxonomy of autonomous underwater vehicle design literature. Ocean. Eng. 2014, 88, 627–630. [Google Scholar] [CrossRef]
- Yu, J.; Chen, E.R.K.; Wang, S.; Wang, M. Progress and analysis of bionic robotic fish research. Control Theory Appl. 2003, 20, 485–491. [Google Scholar]
- Sfakiotakis, M.; Lane, D.M.; Davies, J.B.C. Review of fish swimming modes for aquatic locomotion. IEEE J. Ocean. Eng. 1999, 24, 237–252. [Google Scholar] [CrossRef] [Green Version]
- Wei, Q.P.; Wang, S.H.; Tan, M.; Wang, Y. Progress and analysis of bionic robotic fish research. Syst. Sci. Math. 2012, 32, 1274–1286. [Google Scholar]
- Wang, R.; Wang, S.; Wang, Y.; Cheng, L.; Tan, M. Development and Motion Control of Biomimetic Underwater Robots: A Survey. IEEE Trans. Syst. Man Cybern. Syst. 2020, 52, 833–844. [Google Scholar] [CrossRef]
- Yu, J.; Tan, M.; Chen, J.; Zhang, J. A Survey on CPG-Inspired Control Models and System Implementation. IEEE Trans. Neural Netw. Learn. Syst. 2013, 25, 441–456. [Google Scholar] [CrossRef]
- Yang, W.; Wu, P.; Zhou, X.; Zhu, P.; Liu, X. Central Pattern Generator Model Design and Gait Control Research of Amphibious Robotic Fish. In Proceedings of the Journal of Physics: Conference Series, London, UK, 5 March 2021; IOP Publishing: Bristol, UK, 2021; Volume 2029, p. 012109. [Google Scholar]
- Chen, Y.; Wang, T.; Wu, C.; Wang, X. Design, control, and experiments of a fluidic soft robotic eel. Smart Mater. Struct. 2021, 30, 065001. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, C.; Liu, Z.; Zhao, R.; An, D.; Wei, Y.; Wu, Z.; Yu, J. Design and analysis of a novel tendon-driven continuum robotic dolphin. Bioinspir. Biomim. 2021, 16, 065002. [Google Scholar] [CrossRef]
- Chen, S.; Liu, Y.; Chen, T.; Lou, J. Rhythm motion control in bio-inspired fishtail based on central pattern generator. IET Cyber-Syst. Robot. 2021, 3, 53–67. [Google Scholar] [CrossRef]
- Chen, J.; Yin, B.; Wang, C.; Xie, F.; Du, R.; Zhong, Y. Bioinspired Closed-loop CPG-based Control of a Robot Fish for Obstacle Avoidance and Di-rection Tracking. J. Bionic Eng. 2021, 18, 171–183. [Google Scholar] [CrossRef]
- Wang, J.; Wu, Z.; Tan, M.; Yu, J. Controlling the depth of a gliding robotic dolphin using dual motion control modes. Sci. China Inf. Sci. 2020, 63, 1–14. [Google Scholar] [CrossRef]
- Wang, M.; Yu, J.; Tan, M.; Zhang, J. Multimodal swimming control of a robotic fish with pectoral fins using a CPG network. Chin. Sci. Bull. 2012, 57, 1209–1216. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.; Yu, J.; Su, Z.; Tan, M.; Li, Z. Towards an Esox lucius inspired multimodal robotic fish. Sci. China Inf. Sci. 2015, 58, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Cao, Y.; Lu, Y.; Cai, Y.; Bi, S.; Pan, G. CPG-fuzzy-based control of a cownose-ray-like fish robot. Ind. Robot. Int. J. Robot. Res. Appl. 2019, 46, 779–791. [Google Scholar] [CrossRef]
- Alattas, K.A.; Mobayen, S.; Din, S.U.; Asad, J.H.; Fekih, A.; Assawinchaichote, W.; Vu, M.T. Design of a non-singular adaptive integral-type finite time tracking control for non-linear systems with external disturbances. IEEE Access 2021, 9, 102091–102103. [Google Scholar] [CrossRef]
- Thanh, H.L.N.N.; Vu, M.T.; Mung, N.X.; Nguyen, N.P.; Phuong, N.T. Perturbation Observer-Based Robust Control Using a Multiple Sliding Surfaces for Nonlinear Systems with Influences of Matched and Unmatched Uncertainties. Mathematics 2020, 8, 1371. [Google Scholar] [CrossRef]
- Morgansen, K.A.; Triplett, B.I.; Klein, D.J. Geometric Methods for Modeling and Control of Free-Swimming Fin-Actuated Un-derwater Vehicles. IEEE Trans. Robot. 2007, 23, 1184–1199. [Google Scholar] [CrossRef]
- Shen, F.; Cao, Z.; Zhou, C.; Xu, D.; Gu, N. Depth Control for Robotic Dolphin Based on Fuzzy PID Control. Int. J. Off-Shore Polar Eng. 2013, 23, 166–171. [Google Scholar]
- Yu, J.; Liu, J.; Wu, Z.; Fang, H. Depth Control of a Bioinspired Robotic Dolphin Based on Sliding-Mode Fuzzy Control Method. IEEE Trans. Ind. Electron. 2017, 65, 2429–2438. [Google Scholar] [CrossRef]
- Wei, Q.; Wang, S.; Wang, Y.; Zhou, C.; Tan, M. Course and depth control for a biomimetic underwater vehicle-RobCutt-I. Int. J. Off-Shore Polar Eng. 2015, 25, 81–87. [Google Scholar] [CrossRef]
- Yuan, J.; Wu, Z.; Yu, J.; Tan, M. Sliding Mode Observer-Based Heading Control for a Gliding Robotic Dolphin. IEEE Trans. Ind. Electron. 2017, 64, 6815–6824. [Google Scholar] [CrossRef]
- Gong, Z.; Cai, Y.; Bi, S.; Ma, H. Roll maneuver control of robotic fish propelled by oscillating pectoral fins. J. Beijing Univ. Aeronaut. Astronaut. 2015, 41, 2184. [Google Scholar]
- Fossen, T.I. Marine control systems–guidance, navigation, and control of ships, rigs and underwater vehicles. In Marine Cyber-Netics; TU Delft Publisher: Delft, The Netherlands, 2002; ISBN 8292356 002. [Google Scholar]
- Cao, Y.; Ma, S.; Xie, Y.; Hao, Y.; Zhang, D.; He, Y.; Cao, Y. Parameter Optimization of CPG Network Based on PSO for Manta Ray Robot. In Proceedings of the 2021 International Conference on Autonomous Unmanned Systems (ICAUS), Changsha, China, 24–26 September 2021; Springer: Berlin/Heidelberg, Germany, 2021; pp. 3062–3072. [Google Scholar]
- Chen, Z.; Zhang, B.; Stojanovic, V.; Zhang, Y.; Zhang, Z. Event-based fuzzy control for T-S fuzzy networked systems with various data missing. Neurocomputing 2020, 417, 322–332. [Google Scholar] [CrossRef]
- Mohanty, P.K.; Kundu, S.; Srivastava, S.; Dash, R.N. A New TS Model Based Fuzzy Logic Approach for Mobile Robots Path Planning. In Proceedings of the IEEE International Women in Engineering (WIE) Conference on Electrical and Computer Engineering (WIECON-ECE), Bhubaneswar, India, 26–27 December 2020; pp. 476–480. [Google Scholar]
- Wai, R.-J.; Yang, Z.-W. Adaptive Fuzzy Neural Network Control Design via a T–S Fuzzy Model for a Robot Manipulator Including Actuator Dynamics. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2008, 38, 1326–1346. [Google Scholar] [CrossRef]
- Fan, Y.; An, Y.; Wang, W.; Yang, C. TS Fuzzy Adaptive Control Based on Small Gain Approach for an Uncertain Robot Manipula-tors. Int. J. Fuzzy Syst. 2020, 22, 930–942. [Google Scholar] [CrossRef]
- Vrkalovic, S.; Teban, T.A.; Borlea, I.D. Stable Takagi-Sugeno fuzzy control designed by optimization. Int. J. Artif. Intell. 2017, 15, 17–29. [Google Scholar]
- Li, J. Research on Robot Motion Control Based on Variable Structure Fuzzy Neural Network Based on TS Model. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Changchun, China, 21–23 August 2020; IOP Publishing: Bristol, UK, 2020; Volume 440, p. 032090. [Google Scholar]
- Nguyen, A.T.; Taniguchi, T.; Eciolaza, L.; Campos, V.; Palhares, R.; Sugeno, M. Fuzzy control systems: Past, present and future. IEEE Comput. Intell. Mag. 2019, 14, 56–68. [Google Scholar] [CrossRef]
- Cao, Y.; Xie, Y.; Ma, S.; Zhang, D.; Hao, Y.; He, Y.; Cao, Y. Control of Robotic Manta Based on T-S Fuzzy Neural Network. In Proceedings of the 2021 International Conference on Autonomous Unmanned Systems (ICAUS), Changsha, China, 24–26 September 2021; Springer: Berlin/Heidelberg, Germany, 2021; pp. 2813–2822. [Google Scholar]
- Xing, C.; Cao, Y.; Cao, Y.; Pan, G.; Huang, Q. Asymmetrical Oscillating Morphology Hydrodynamic Performance of a Novel Bionic Pectoral Fin. J. Mar. Sci. Eng. 2022, 10, 289. [Google Scholar] [CrossRef]
- Hao, Y.; Cao, Y.; Cao, Y.; Huang, Q.; Pan, G. Course Control of a Manta Robot Based on Amplitude and Phase Differences. J. Mar. Sci. Eng. 2022, 10, 285. [Google Scholar] [CrossRef]
- Ma, N.; Yu, J.; Dong, X.; Axinte, D. Design and stiffness analysis of a class of 2-DoF tendon driven parallel kinematics mechanism. Mech. Mach. Theory 2018, 129, 202–217. [Google Scholar] [CrossRef]
- Wang, M.; Palmer, D.; Dong, X.; Alatorre, D.; Axinte, D.; Andy, N. Design and development of a slender dual-structure continuum robot for in-situ aeroengine repair. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 5648–5653. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Specification |
|---|---|
| Dimension (L × W × H) | 600 mm × 800 mm × 150 mm |
| Mass | 8.00 kg |
| Actuator mode | DC servomotors |
| Battery | 7.4-VDC 1500-mAH Ni-H |
| Micro-controller | STM32F103ZET6 |
| Inertial measurement unit | SBG ELLIPSE2 |
| Sensors | Pressure sensor, Laser sensors |
| Control mode | Radio control (433 MHz) |
| Items | Unit | ||
|---|---|---|---|
| 40 | 40 | ° | |
| 0 | 0 | ° | |
| 0.4 | 0.4 | Hz | |
| 0 | 30 | ° | |
| 0 | 0 | ° | |
| 0 | 30 | ° | |
| 10 | 10 | ° | |
| −35 | −55 | ° | |
| 20 | 20 | - | |
| 2 | 2 | - |
| Desired Value | Max Error | Average Error | Standard Deviation |
|---|---|---|---|
| 50 | 6 | 1.42 | 2.89 |
| 6 | −0.17 | 3.12 | |
| 6 | −0.19 | 3.36 | |
| 80 | 5 | 1.71 | 2.21 |
| 6 | 1.24 | 2.54 | |
| 6 | 2.57 | 2.46 |
| Desired Value | MAX Error | Average Error | Standard Deviation |
|---|---|---|---|
| 340 | 3.65 | 1.31 | 1.64 |
| 235 | −5.72 | −0.89 | 3.09 |
| 160 | 4.51 | 0.40 | 2.86 |
| 0 | 1.59 | 0.61 | 0.47 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Y.; Xie, Y.; He, Y.; Pan, G.; Huang, Q.; Cao, Y. Bioinspired Central Pattern Generator and T-S Fuzzy Neural Network-Based Control of a Robotic Manta for Depth and Heading Tracking. J. Mar. Sci. Eng. 2022, 10, 758. https://doi.org/10.3390/jmse10060758
Cao Y, Xie Y, He Y, Pan G, Huang Q, Cao Y. Bioinspired Central Pattern Generator and T-S Fuzzy Neural Network-Based Control of a Robotic Manta for Depth and Heading Tracking. Journal of Marine Science and Engineering. 2022; 10(6):758. https://doi.org/10.3390/jmse10060758
Chicago/Turabian StyleCao, Yonghui, Yu Xie, Yue He, Guang Pan, Qiaogao Huang, and Yong Cao. 2022. "Bioinspired Central Pattern Generator and T-S Fuzzy Neural Network-Based Control of a Robotic Manta for Depth and Heading Tracking" Journal of Marine Science and Engineering 10, no. 6: 758. https://doi.org/10.3390/jmse10060758
APA StyleCao, Y., Xie, Y., He, Y., Pan, G., Huang, Q., & Cao, Y. (2022). Bioinspired Central Pattern Generator and T-S Fuzzy Neural Network-Based Control of a Robotic Manta for Depth and Heading Tracking. Journal of Marine Science and Engineering, 10(6), 758. https://doi.org/10.3390/jmse10060758