
Predictive Control for a Wave-Energy Converter Array Based on an Interconnected Model

 ,
,  , and
, and
Abstract
:1. Introduction
2. Model of WEC Array
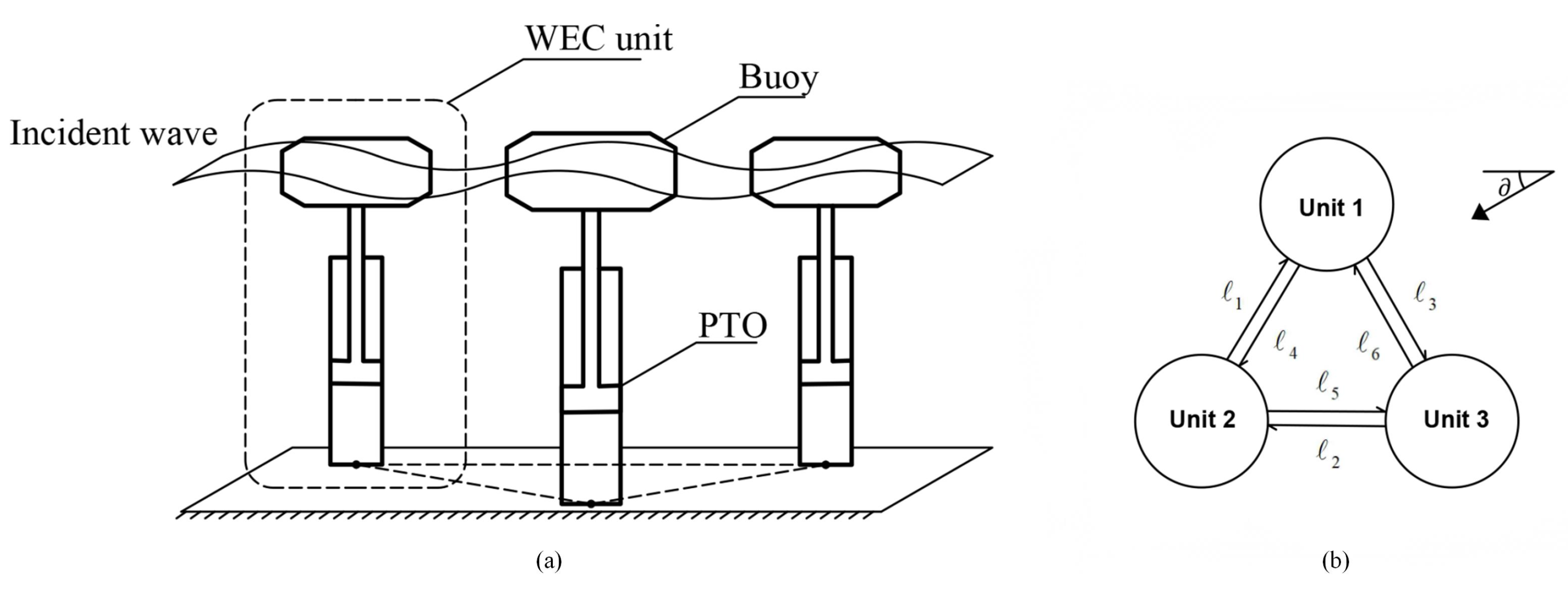
2.1. Model of WEC Unit
2.2. WEC Array
2.2.1. WEC Units in Array
2.2.2. Interactions among WEC Units
2.2.3. WEC Array System
3. MPC Algorithm Design
3.1. Control Problem Statement
3.2. Prediction Model
3.3. Quadratic Programming Problem
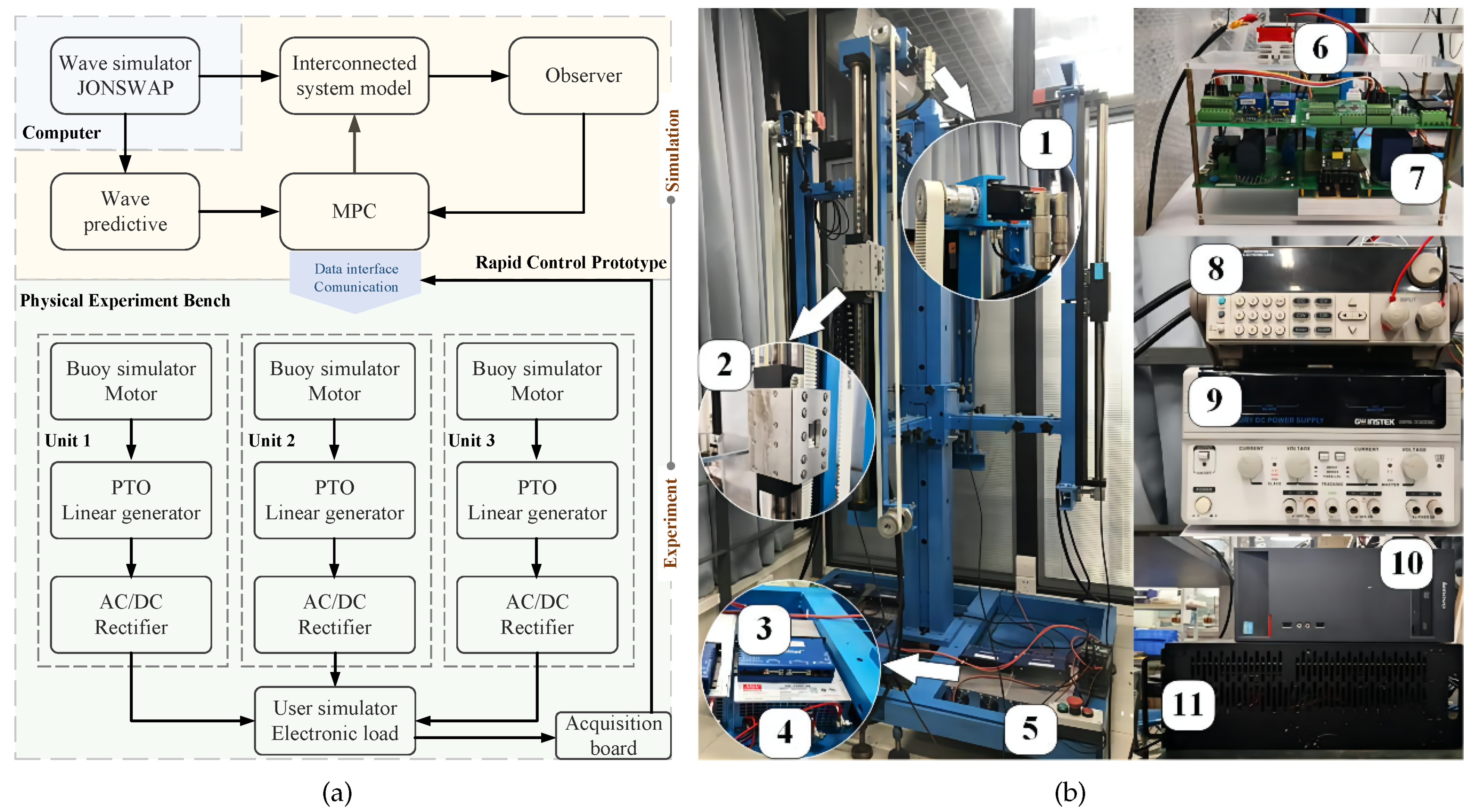
4. Experimental Results and Discussion
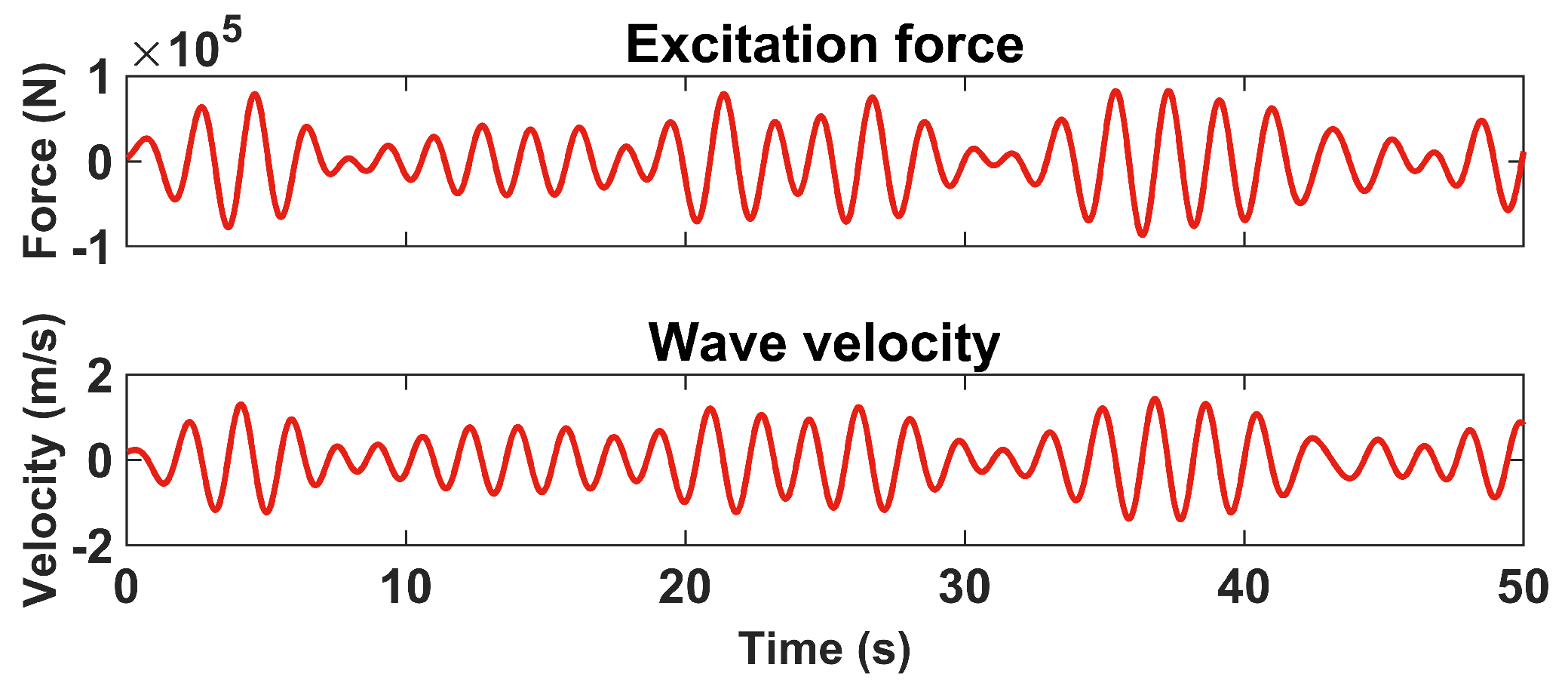
4.1. Simulation of Wave Energy Harvesting
- (i)
- Verifying the correctness of the interconnected model and the control performance of the proposed MPC algorithm;
- (ii)
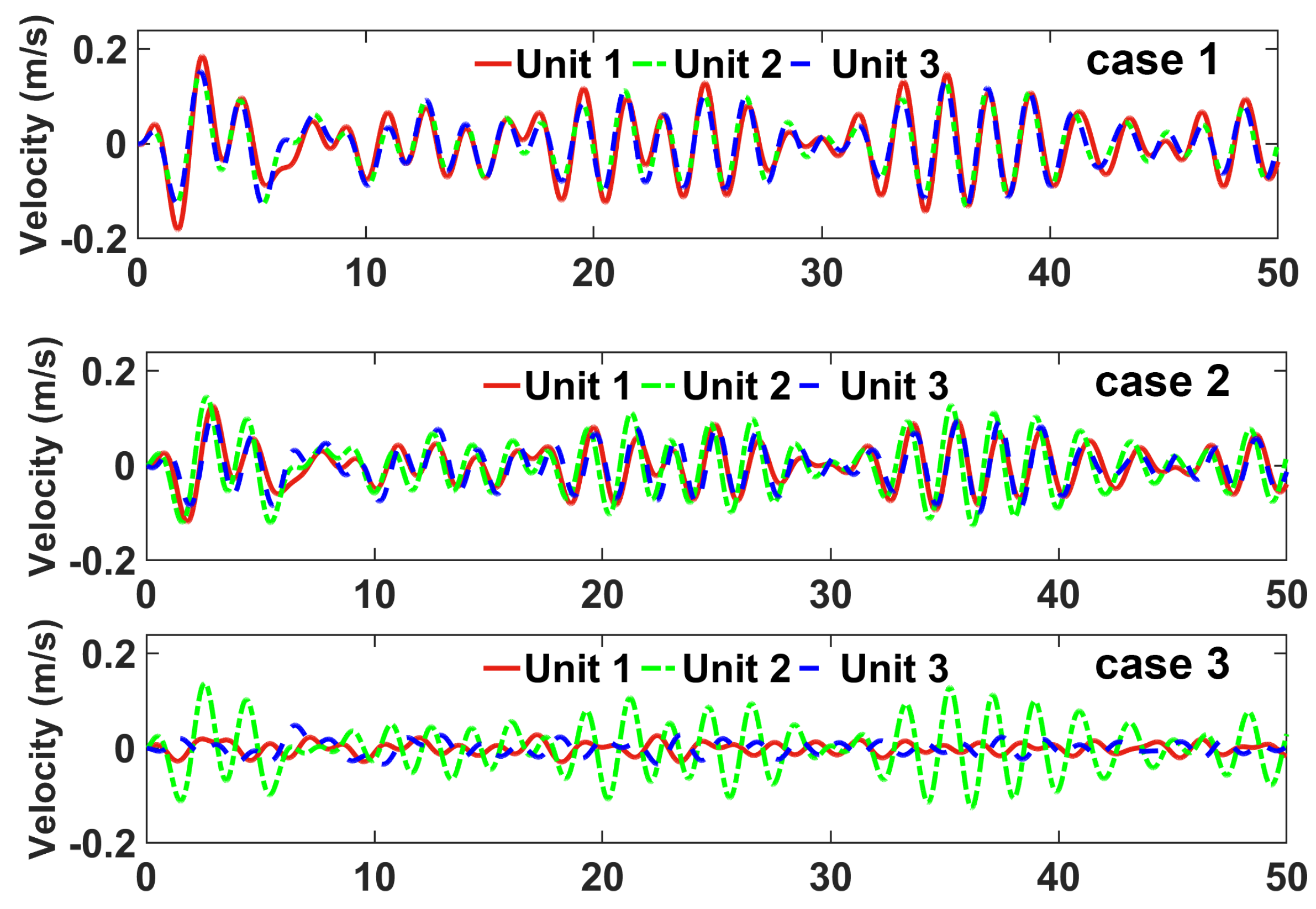
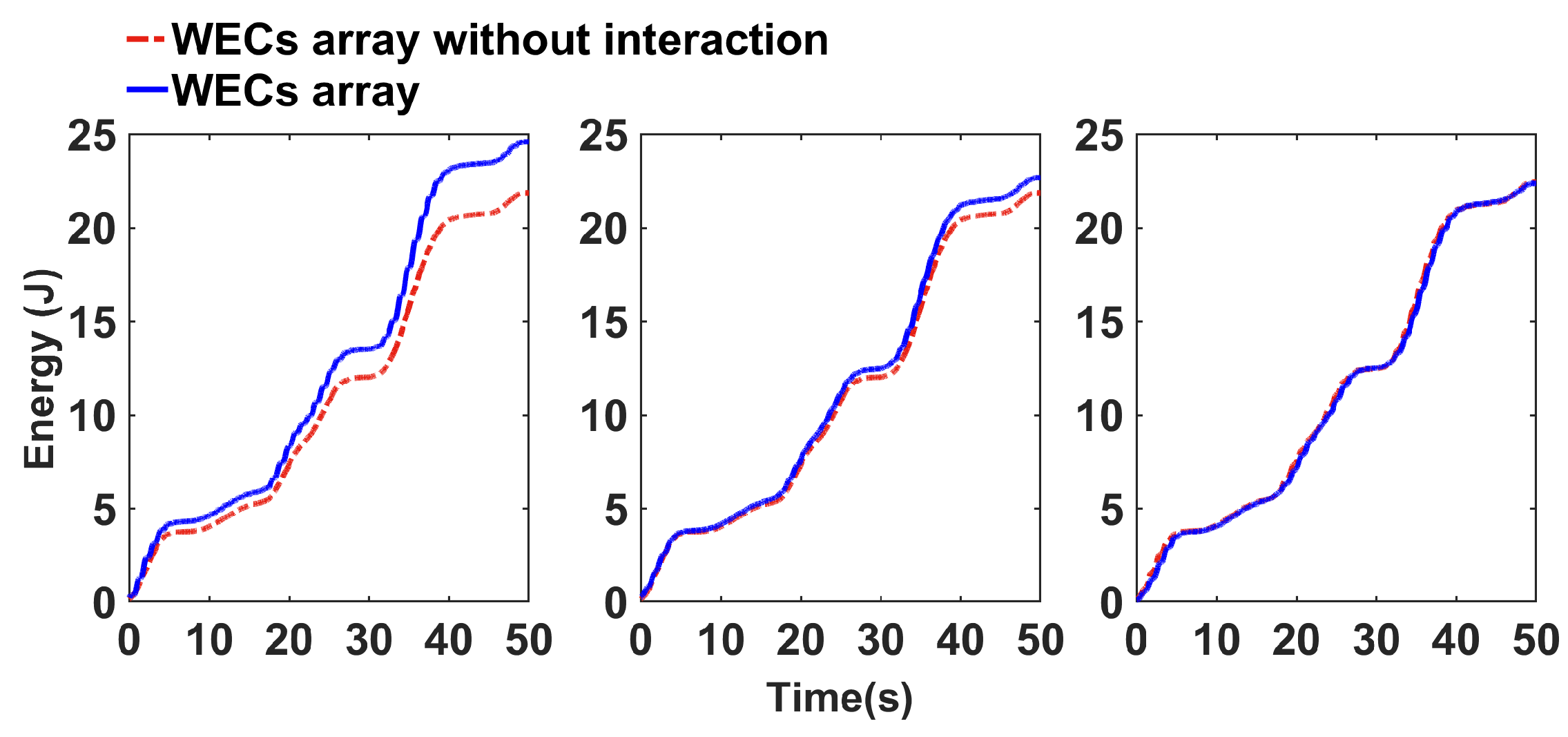
- Comparing the difference in the motion characteristics affected by the interaction and the wave energy harvesting efficiency between the interconnected model and the isolated model of the WEC array, and exploring how to affect the wave energy harvesting efficiency by change in the incident wave propagation direction in the WEC interconnected system.
4.2. Simulation Parameter Setting
4.3. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- O’Sullivan, A.; Sheng, W.; Lightbody, G. An analysis of the potential benefits of centralised predictive control for optimal electrical power generation from wave energy arrays. IEEE Trans. Sustain. Energy 2018, 9, 1761–1771. [Google Scholar] [CrossRef]
- Babarit, A. On the park effect in arrays of oscillating wave energy converters. Renew. Energy 2013, 58, 68–78. [Google Scholar] [CrossRef]
- Kagemoto, H.; Yue, D.K. Interactions among multiple three–dimensional bodies in water waves: An exact algebraic method. J. Fluid Mech. 1986, 166, 189–209. [Google Scholar] [CrossRef]
- Babarit, A.; Borgarino, B.; Ferrant, P.; Clément, A.H. Assessment of the influence of the distance between two wave energy converters on energy production. IET Renew. Power Gener. 2009, 4, 592–601. [Google Scholar] [CrossRef]
- Borgarino, B.; Babarit, A.; Ferrant, P. Impact of wave interactions effects on energy absorption in large arrays of wave energy converters. Ocean Eng. 2012, 41, 79–88. [Google Scholar] [CrossRef]
- Devolder, B.; Stratigaki, V.; Troch, P.A.; Rauwoens, P. CFD simulations of floating point absorber wave energy converter arrays subjected to regular waves. Energies 2018, 11, 641. [Google Scholar] [CrossRef]
- Chen, W.; Gao, F.; Meng, X.; Fu, J. Design of the wave energy converter array to achieve constructive effects. Ocean Eng. 2016, 124, 13–20. [Google Scholar] [CrossRef]
- Fang, H.; Feng, Y.; Li, G. Optimization of wave energy converter arrays by an improved differential evolution algorithm. Energies 2018, 11, 3522. [Google Scholar] [CrossRef]
- Sharp, C.; DuPont, B. Wave energy converter array optimization: A genetic algorithm approach and minimum separation distance study. Ocean. Eng. 2018, 163, 148–156. [Google Scholar] [CrossRef]
- Previsic, M.; Karthikeyan, A.; Scruggs, J.T. A comparative study of model predictive control and optimal causal control for heaving point absorbers. J. Mar. Sci. Eng. 2021, 9, 805. [Google Scholar] [CrossRef]
- Faedo, N.; Olaya, S.; Ringwood, J.V. Optimal control, MPC and MPC–like algorithms for wave energy systems: An overview. IFAC J. Syst. Control 2017, 1, 37–56. [Google Scholar] [CrossRef]
- Haider, A.S.; Brekken, T.K.; Mccall, A.K. Real-Time nonlinear model predictive controller for multiple degrees of freedom wave energy converters with non–ideal power take-off. J. Mar. Sci. Eng. 2021, 9, 890. [Google Scholar] [CrossRef]
- Jia, Y.; Meng, K.; Dong, L.; Liu, T.; Sun, C.; Dong, Z.Y. Economic model predictive control of a point absorber wave energy converter. IEEE Trans. Sustain. Energy 2021, 12, 578–586. [Google Scholar] [CrossRef]
- Montoya, D.G.; Tedeschi, E.; Castellini, L.; Martins, T.D. Passive model predictive control on a two–body self–referenced point absorber wave energy converter. Energies 2021, 14, 1731. [Google Scholar] [CrossRef]
- Haider, A.S.; Brekken, T.K.; Mccall, A.K. Application of real-time nonlinear model predictive control for wave energy conversion. IET Renew. Power Gener. 2021, 15, 3331–3340. [Google Scholar] [CrossRef]
- Richter, M.; Magaña, M.E.; Sawodny, O.; Brekken, T.K. Nonlinear model predictive control of a point absorber wave energy converter. IEEE Trans. Sustain. Energy 2013, 4, 118–126. [Google Scholar] [CrossRef]
- Oetinger, D.; Magaña, M.E.; Sawodny, O. Decentralized model predictive control for wave energy converter arrays. IEEE Trans. Sustain. Energy 2014, 5, 1099–1107. [Google Scholar] [CrossRef]
- Oetinger, D.; Magaña, M.E.; Sawodny, O. Centralised model predictive controller design for wave energy converter arrays. IET Renew. Power Gener. 2015, 9, 142–153. [Google Scholar] [CrossRef]
- Vicente, P.C.; Falcão, A.F.; Gato, L.M.; Justino, P.A. Dynamics of arrays of floating point-absorber wave energy converters with inter-body and bottom slack-mooring connections. Appl. Ocean Res. 2009, 31, 267–281. [Google Scholar] [CrossRef]
- Li, G.; Belmont, M. Model predictive control of sea wave energy converters—Part I: A convex approach for the case of a single device. Renew. Energy 2014, 69, 453–463. [Google Scholar] [CrossRef]
- Yu, Z.; Falnes, J. State-Space modelling of a vertical cylinder in heave. Appl. Ocean Res. 1995, 17, 265–275. [Google Scholar] [CrossRef]
- Jama, M.A.; Wahyudie, A.; Noura, H. Robust predictive control for heaving wave energy converters. Control. Eng. Pract. 2018, 77, 138–149. [Google Scholar] [CrossRef]
- Li, G.; Belmont, M. Model predictive control of sea wave energy converters—Part II: The case of an array of devices. Renew. Energy 2014, 68, 540–549. [Google Scholar] [CrossRef]
- Coogan, S.D.; Arcak, M. A dissipativity approach to safety verification for interconnected systems. IEEE Trans. Autom. Control 2015, 60, 1722–1727. [Google Scholar] [CrossRef]
- Falnes, J. Radiation impedance matrix and optimum power absorption for interacting oscillators in surface waves. Appl. Ocean Res. 1980, 2, 75–80. [Google Scholar] [CrossRef]
- Product Specifications for the pb3. Available online: https://oceanpowertechnologies.com/product/ (accessed on 1 March 2021).
- Viet, N.V.; Carpinteri, A.; Wang, Q. A novel heaving ocean wave energy harvester with a frequency tuning capability. Arab. J. Sci. Eng. 2019, 44, 5711–5722. [Google Scholar] [CrossRef]
- Aranuvachapun, S. Parameters of JONSWAP spectral model for surface gravity waves—I. Monte Carlo simulation study. Ocean Eng. 1987, 14, 89–100. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Electrical Parameters | Value | Mechanical Parameters | Value |
|---|---|---|---|
| Rated power (W) | 50 | Mover stroke (cm) | 70 |
| Rated current (A) | 20 | Mover speed (m/s) | m |
| Rated voltage (V) | 20 | Mover length (cm) | 18 |
| Conversion efficiency | Mover weight (kg) |
| Description | Notation | Value |
|---|---|---|
| Diameter | a | m |
| Height | h | m |
| Damping | D | Nm/s |
| Buoy mass | m | 8300 kg |
| Added mass | 6100 kg | |
| Stiffness | N/m | |
| Density of sea water | 1020 kg/m | |
| Gravity | g | m/s |
| Maximum heave motion | m | |
| Maximum input magnitude | N |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Zhang, H.; Yang, S.; Chen, S.; Bai, X.; Khan, A. Predictive Control for a Wave-Energy Converter Array Based on an Interconnected Model. J. Mar. Sci. Eng. 2022, 10, 1033. https://doi.org/10.3390/jmse10081033
Zhang B, Zhang H, Yang S, Chen S, Bai X, Khan A. Predictive Control for a Wave-Energy Converter Array Based on an Interconnected Model. Journal of Marine Science and Engineering. 2022; 10(8):1033. https://doi.org/10.3390/jmse10081033
Chicago/Turabian StyleZhang, Bo, Haixu Zhang, Sheng Yang, Shiyu Chen, Xiaoshan Bai, and Awais Khan. 2022. "Predictive Control for a Wave-Energy Converter Array Based on an Interconnected Model" Journal of Marine Science and Engineering 10, no. 8: 1033. https://doi.org/10.3390/jmse10081033
APA StyleZhang, B., Zhang, H., Yang, S., Chen, S., Bai, X., & Khan, A. (2022). Predictive Control for a Wave-Energy Converter Array Based on an Interconnected Model. Journal of Marine Science and Engineering, 10(8), 1033. https://doi.org/10.3390/jmse10081033