
Research on Intelligent Trajectory Control Method of Water Quality Testing Unmanned Surface Vessel

Abstract
:1. Introduction
2. Water Quality Testing Unmanned Surface Vessel Control System
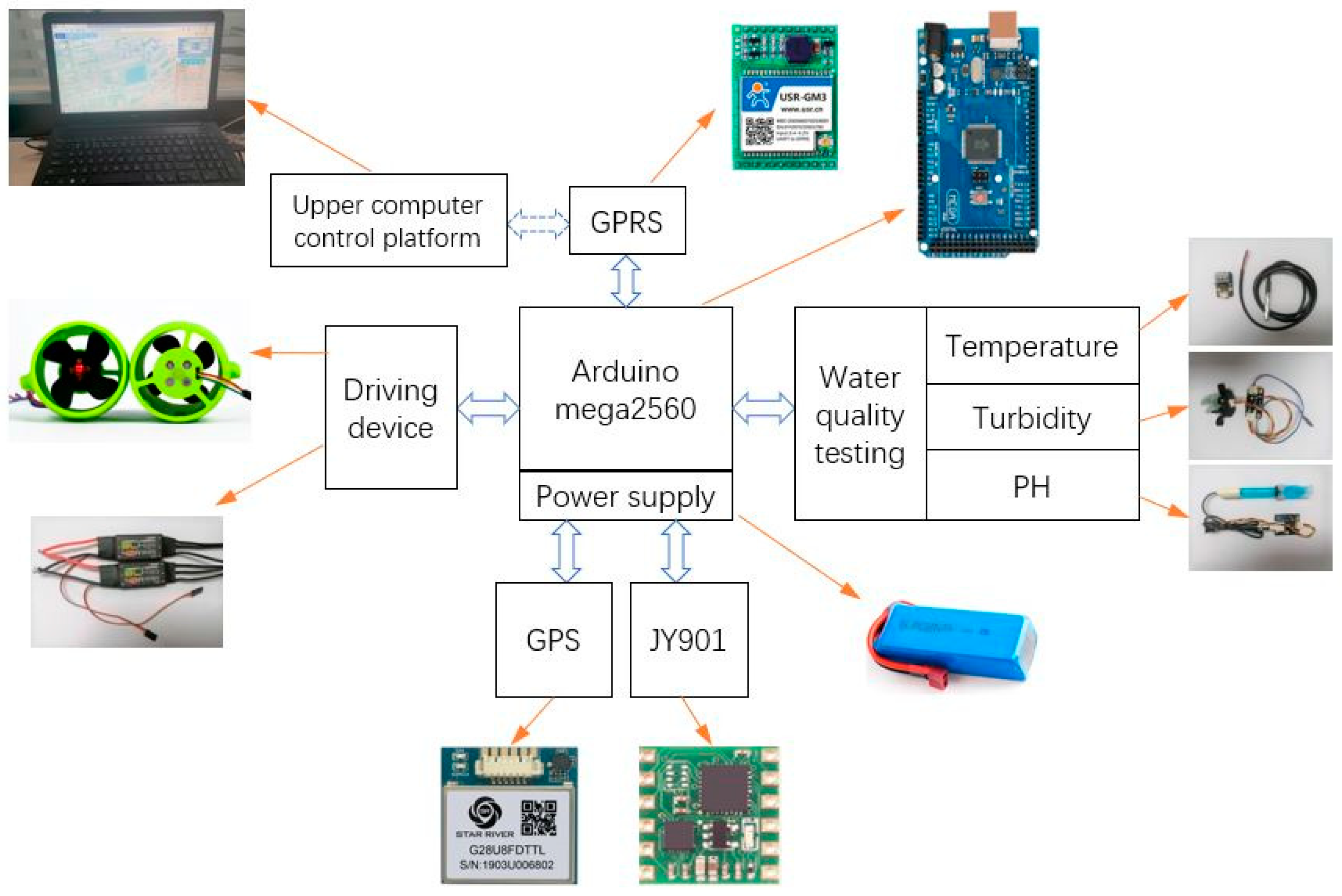
2.1. Design Selection
2.2. Lower Computer Control Platform
2.3. Upper Computer Control Platform
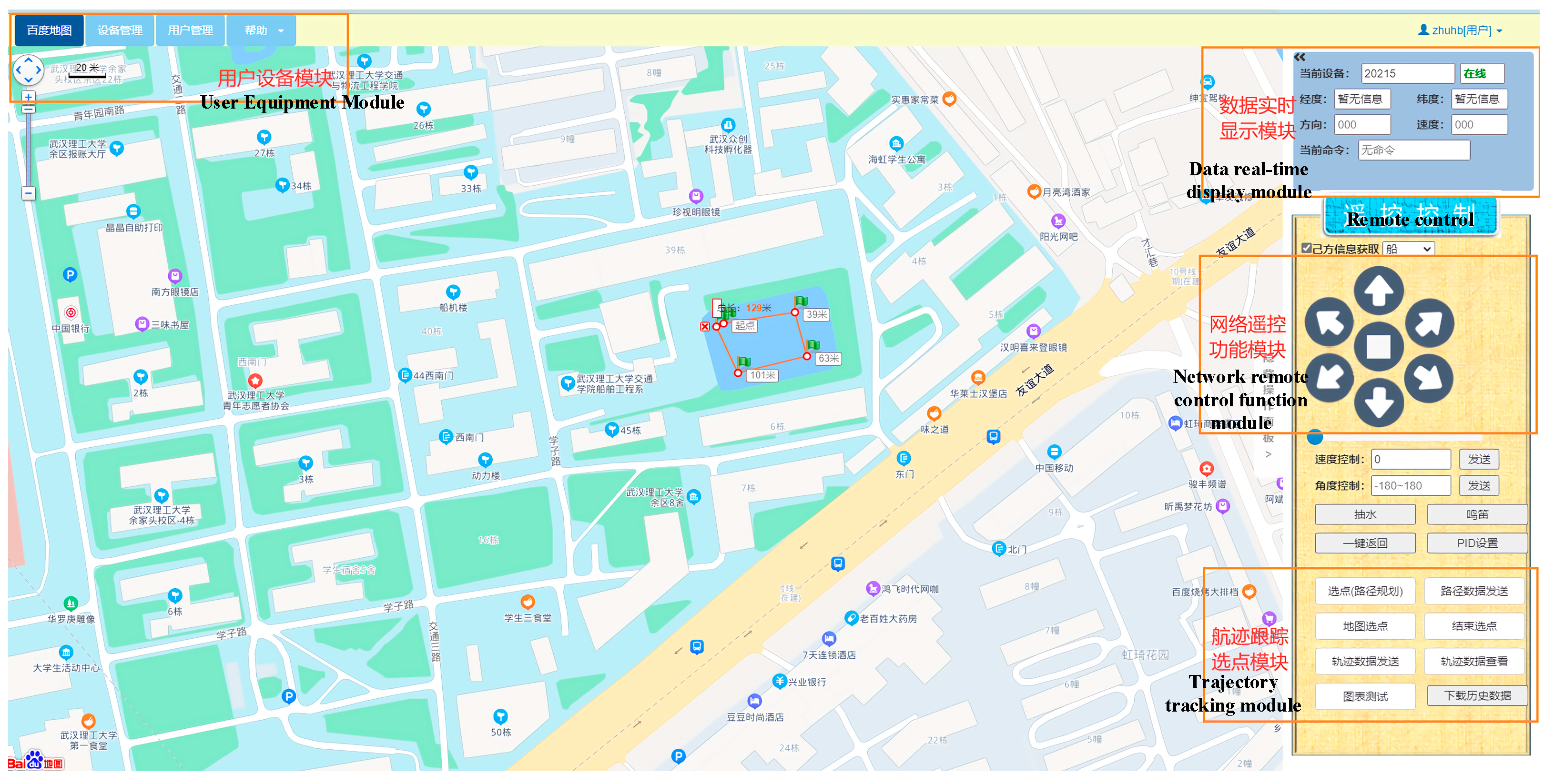
2.3.1. Control Platform Functions
2.3.2. Parameter Configuration
3. Mathematical Model of Unmanned Surface Vessel
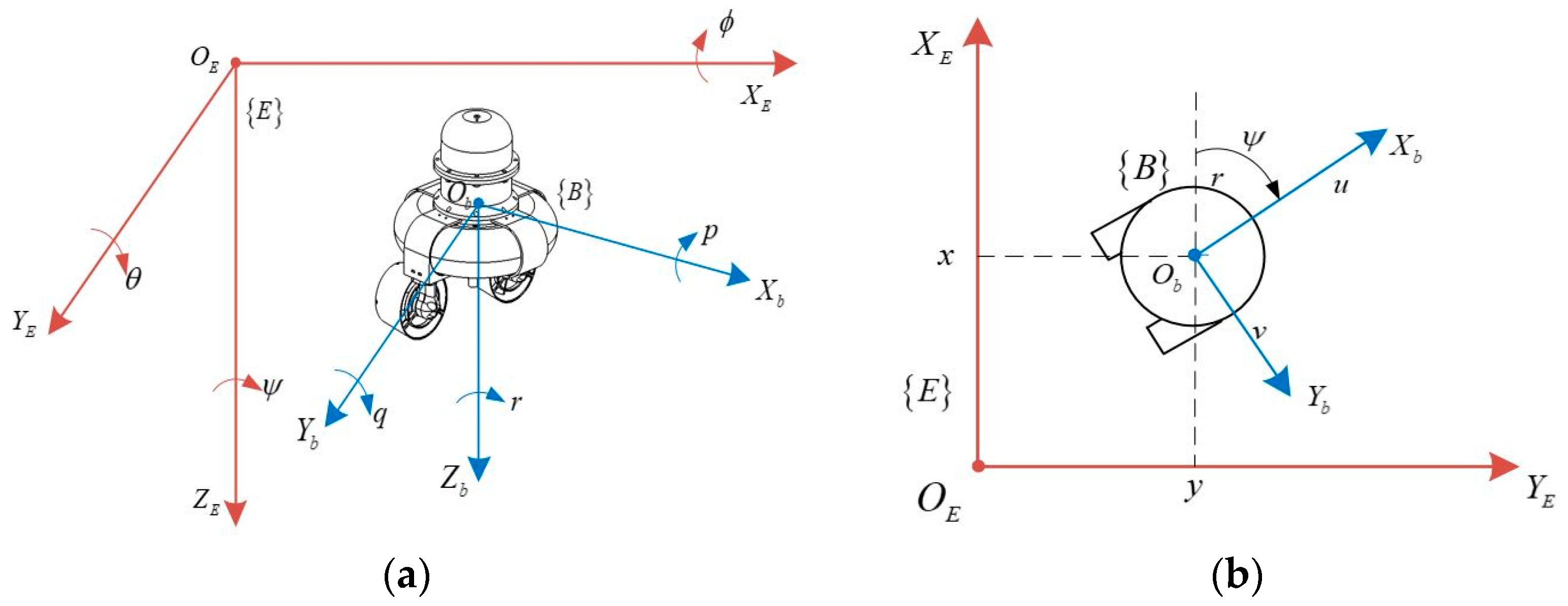
3.1. Mathematical Model of Motion
- The hull is symmetrical from left to right and from front to back, ;
- The coordinate origin of the hull coordinate system coincides with the center of gravity with ;
- Considering only the motion of the horizontal plane of the vessel load and ignoring the effect of transverse, longitudinal, and bow rocking motion, we set ;
- The influence of model uncertainty and external disturbance can be ignored.
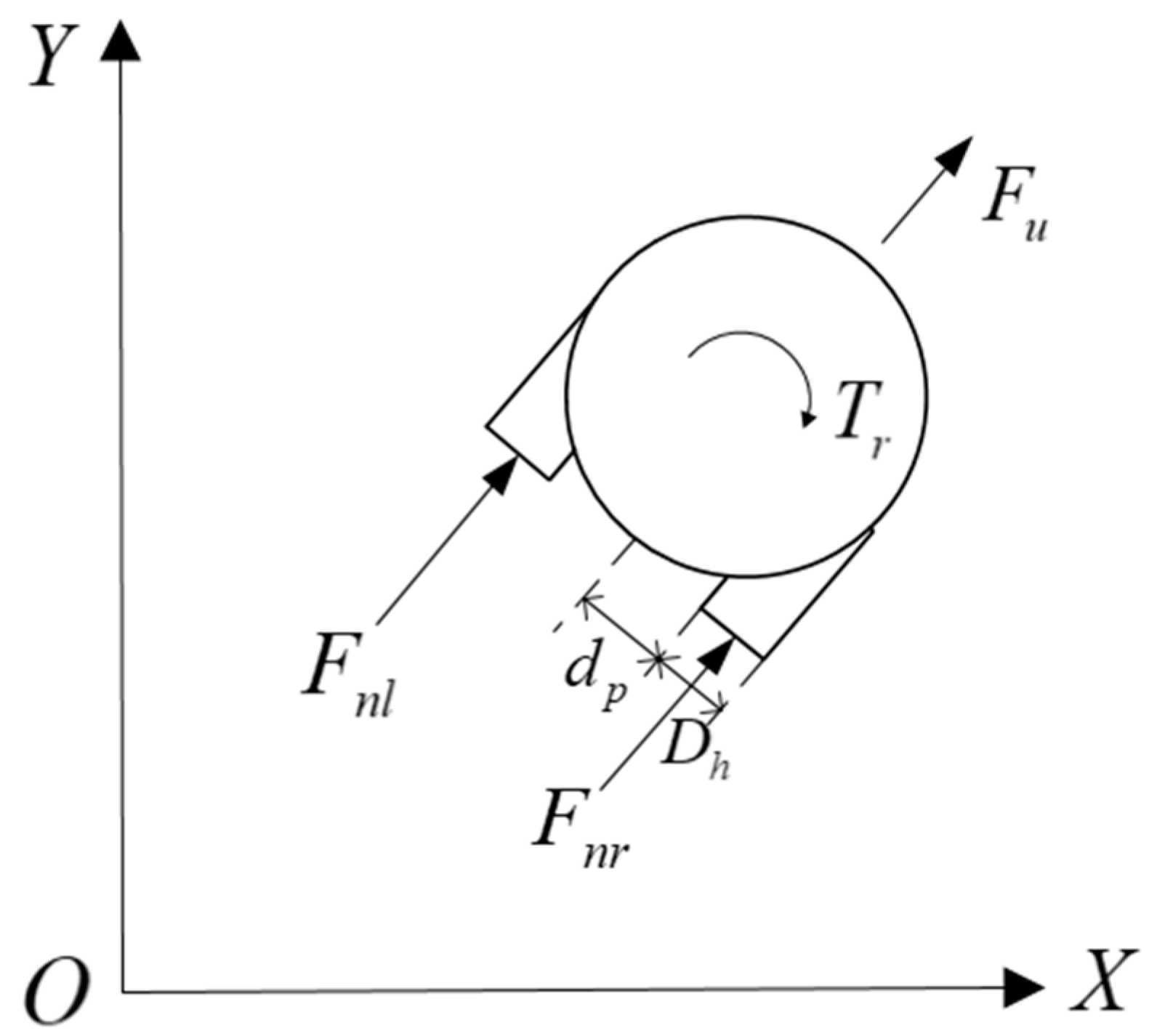
3.2. Mathematical Model of Propulsion
3.3. Morporation of Virtual Rudder Angle and Speed
4. Heading Control and Trajectory Tracking Algorithms
4.1. Heading Control Based on HSIC Algorithm
4.1.1. HSIC Algorithm Improvement
4.1.2. Control Level Design
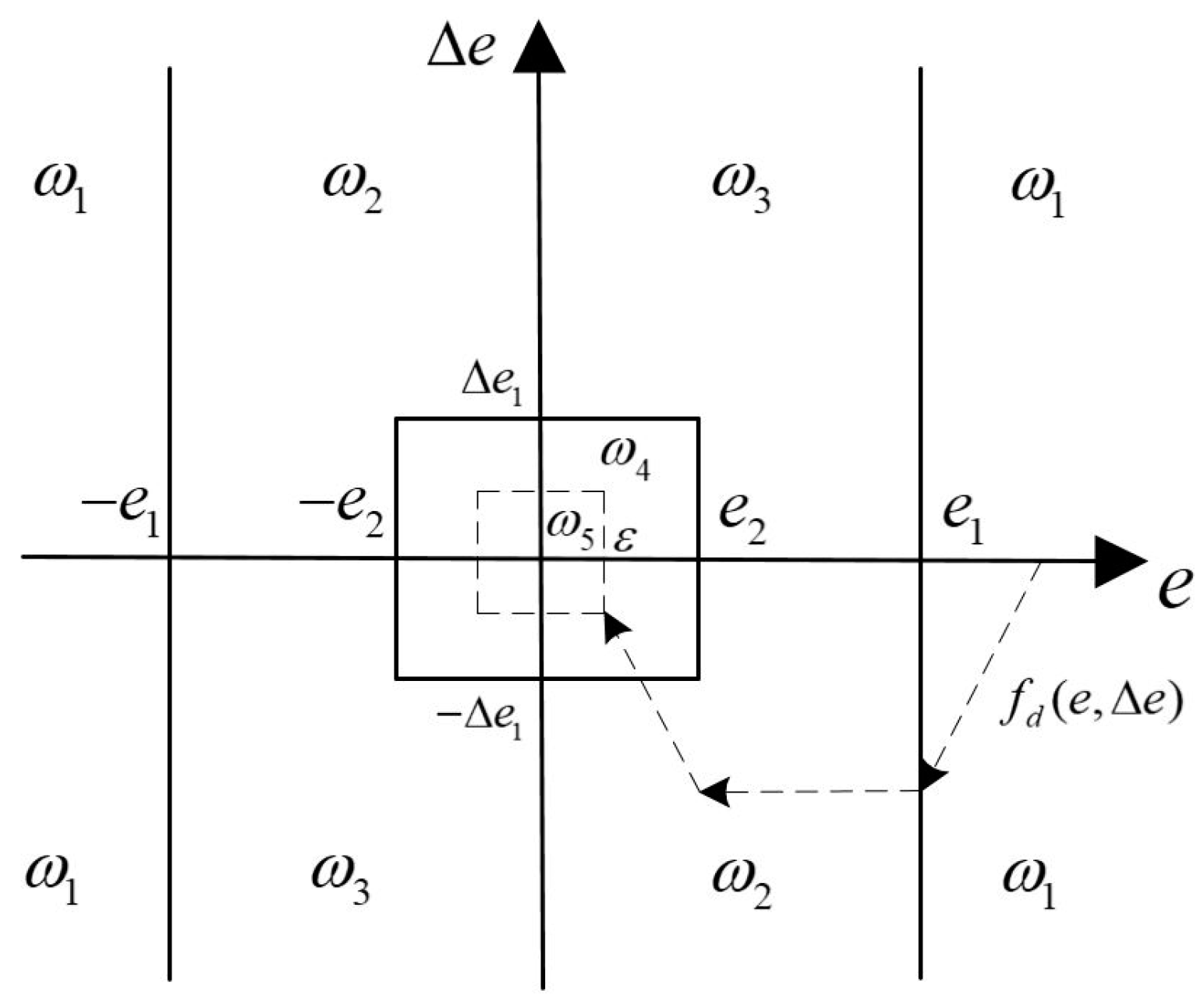
- Feature mode : . Which reflects that the actual heading angle of the USV deviates greatly from the target heading. The difference in the sign of deviation e between quadrant one and four and quadrant two and three in the figure reflects the left or right deviation in the actual heading. At this time, in order to track the target heading as soon as possible, it is necessary to execute the maximum position of the rudder command (control the maximum speed difference between the left and right motors) in order to control the USV to perform a larger steering action;
- Feature mode : . The deviation and are both in a wide range. makes have a decreasing trend, and the PID control module is multiplied by the suppression factor to ensure the and the to decrease further;
- Feature mode : . Both and are in a large state, and the makes the change in the direction of increasing. A stronger PID regulation control is needed to achieve rapid convergence of deviation, so the gain factor is multiplied by the output of the original PID control module;
- Feature mode : , . and are small, and the PID control module is used to update the system output by continuously calculating the increment of the deviation;
- Feature mode : , ( is a very small positive number). and are very small, and at this time can be considered to have completed the tracking, the system control output remains unchanged. The output of the next moment and the current output value is the same, reflected in the motor by the consistent interval moment motor speed, maintaining the current heading state.
4.1.3. Control Parameters
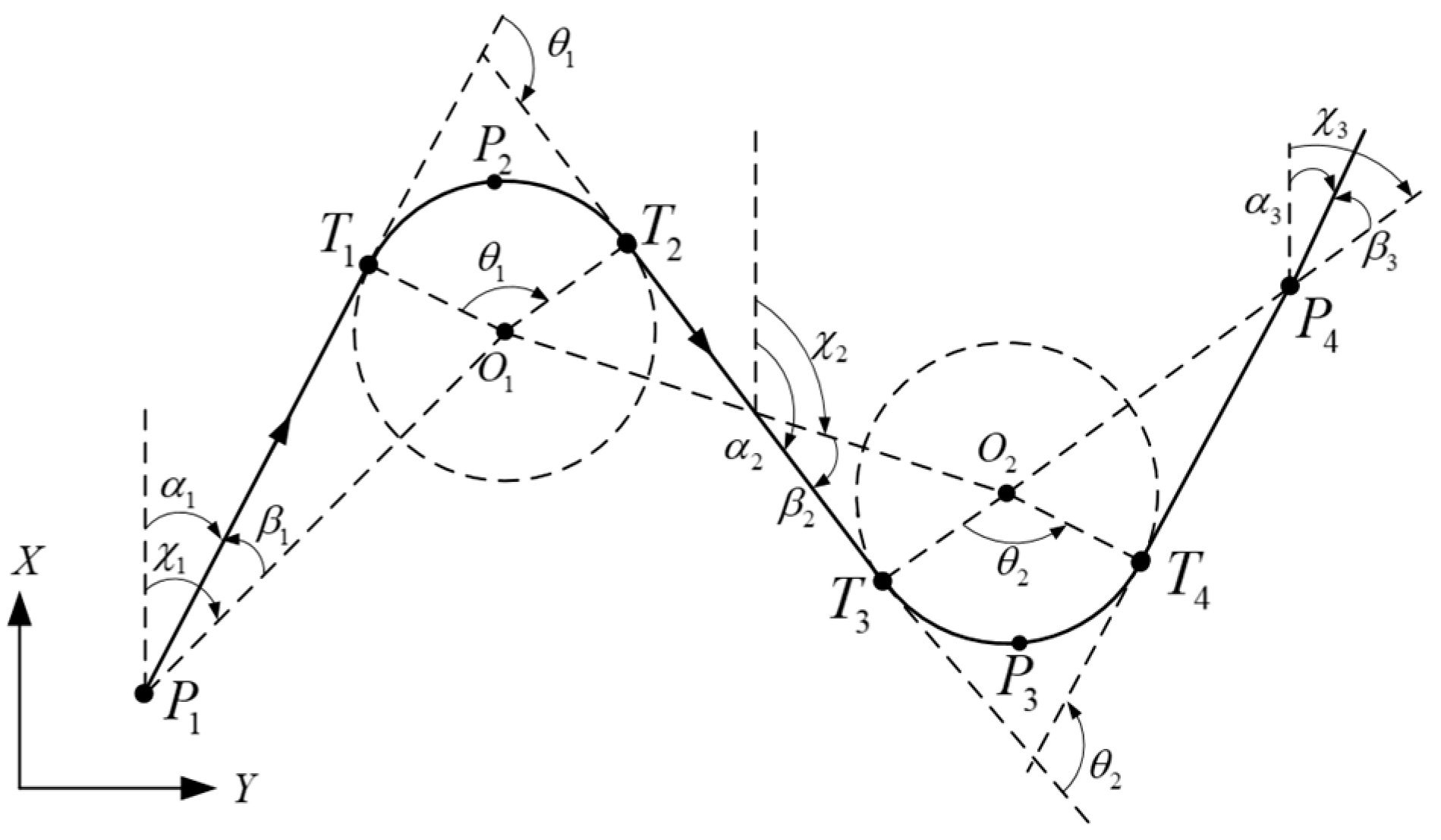
4.2. Trajectory Tracking Control Based on LOS Algorithm
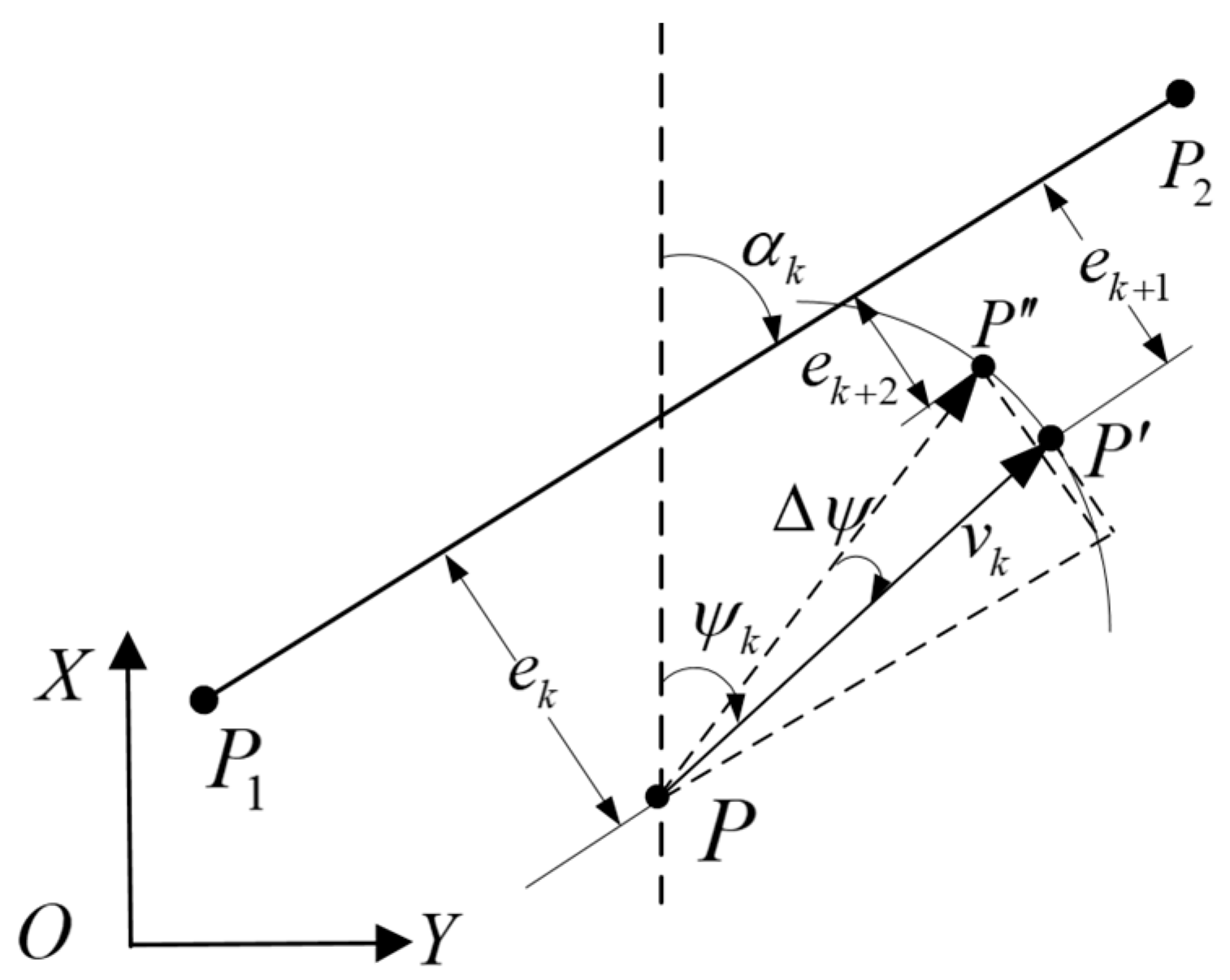
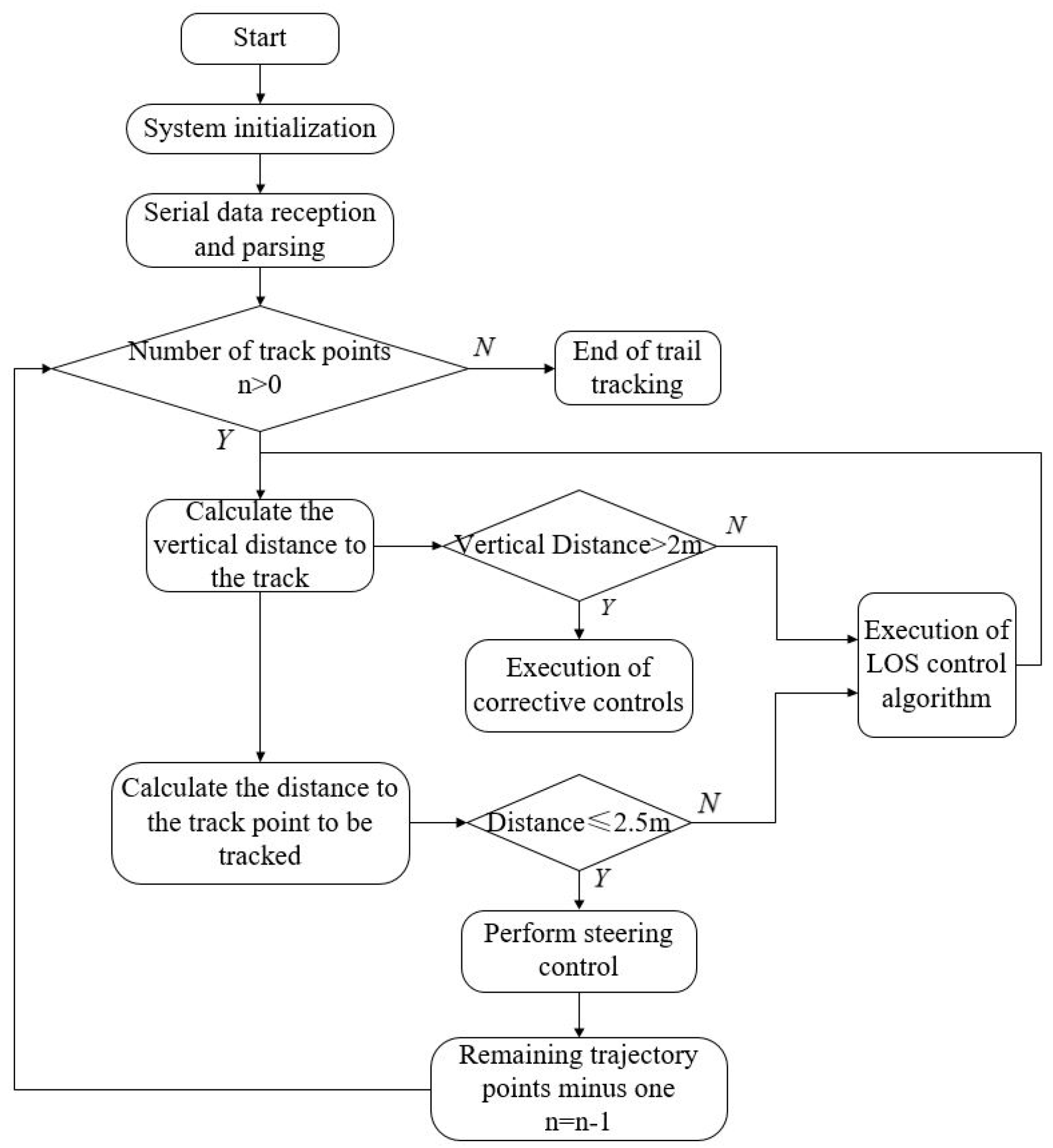
4.2.1. Track Correction
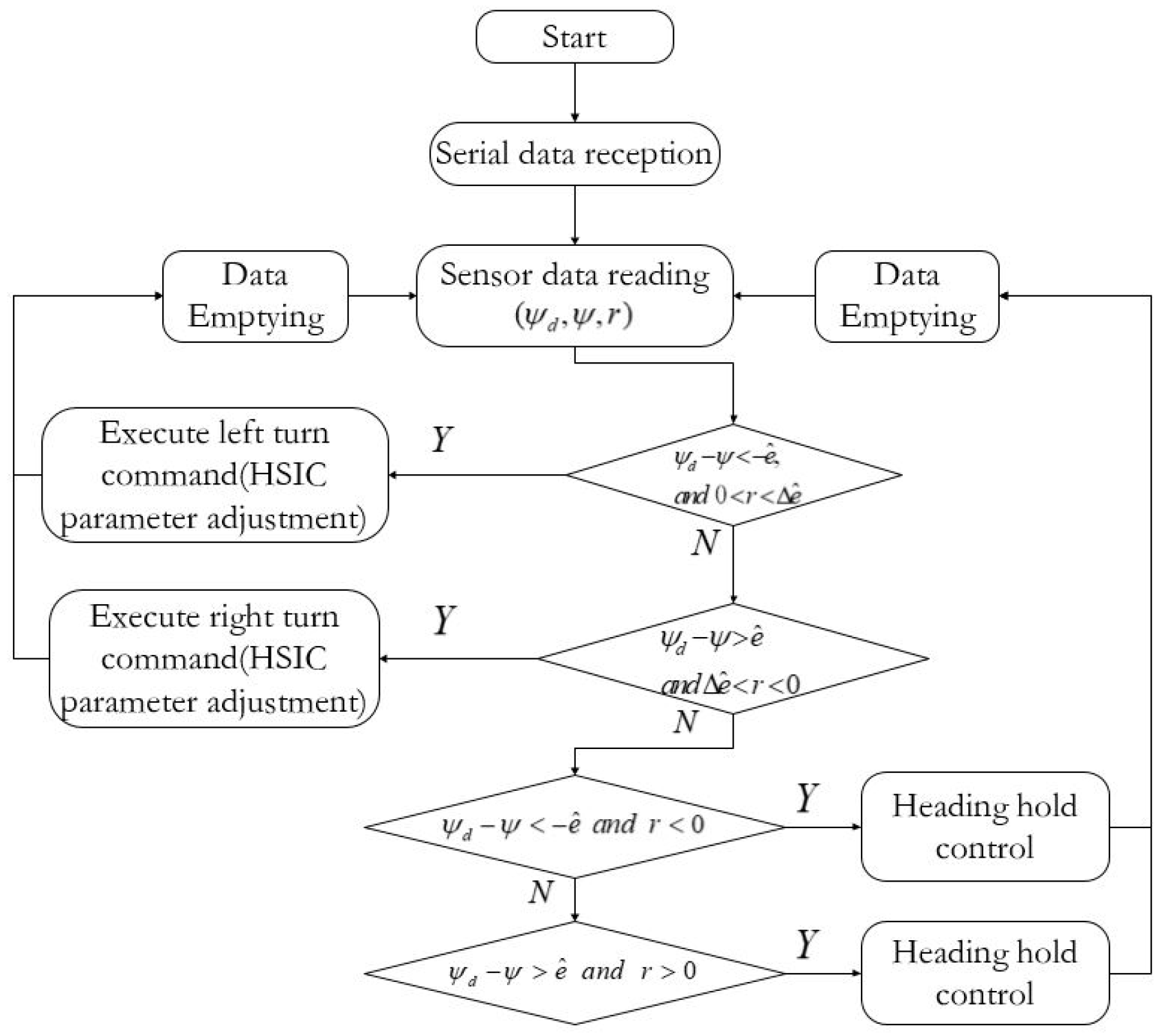
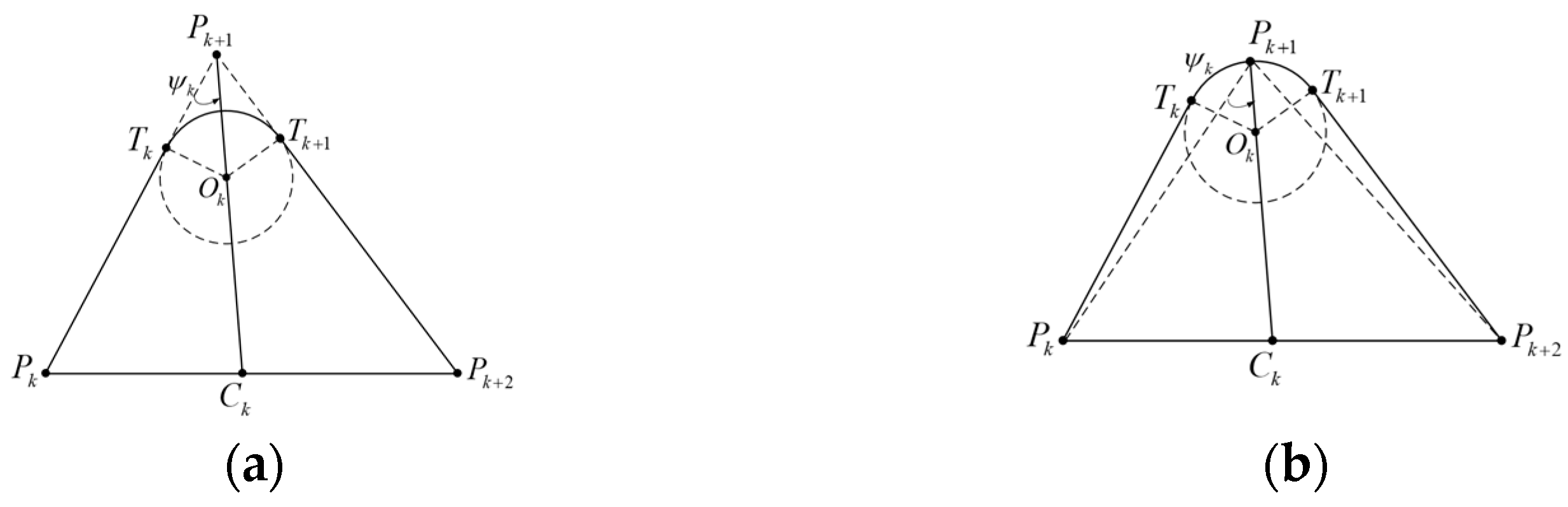
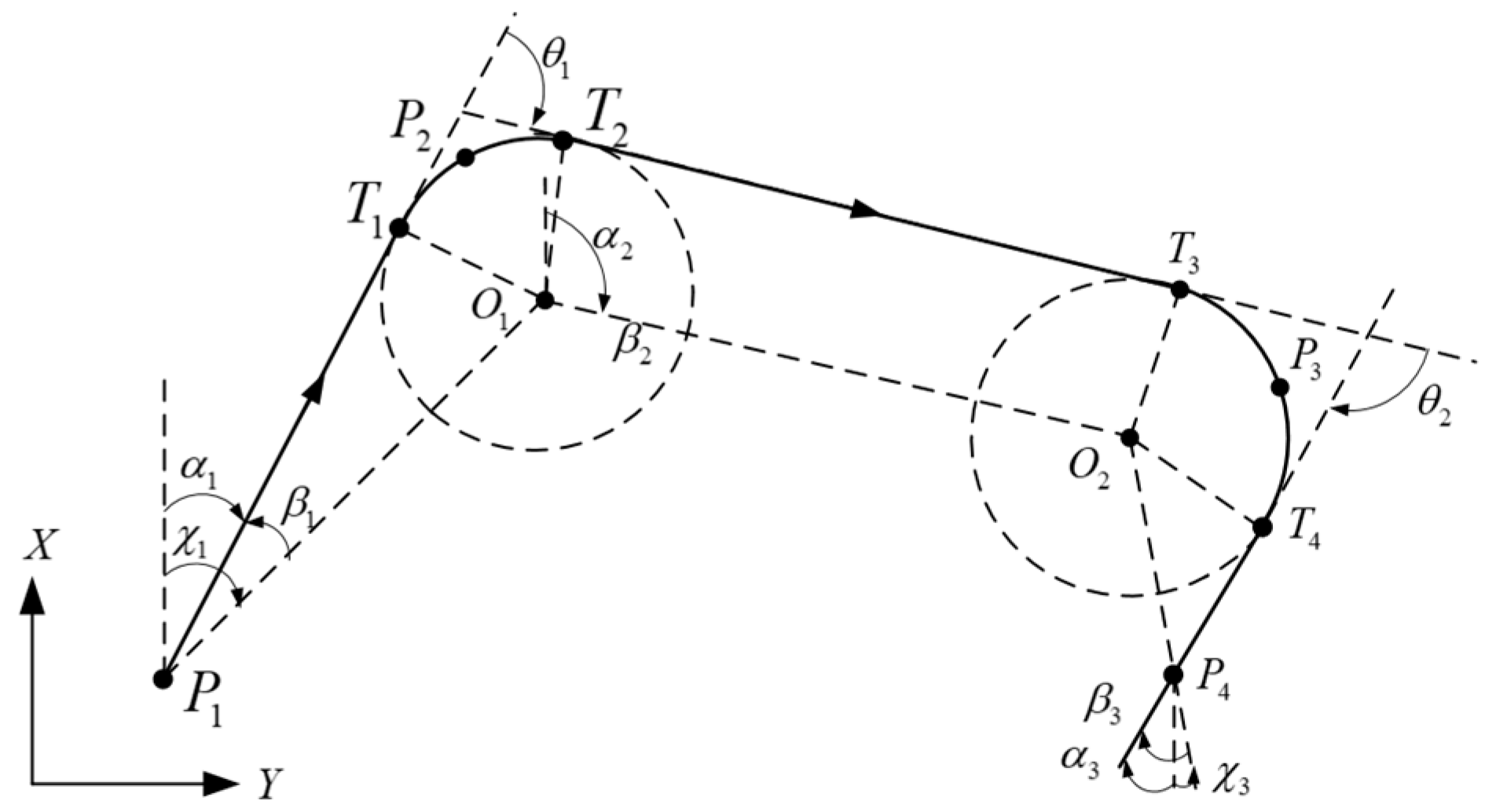
4.2.2. Steering Control
5. Experiments and Discussions
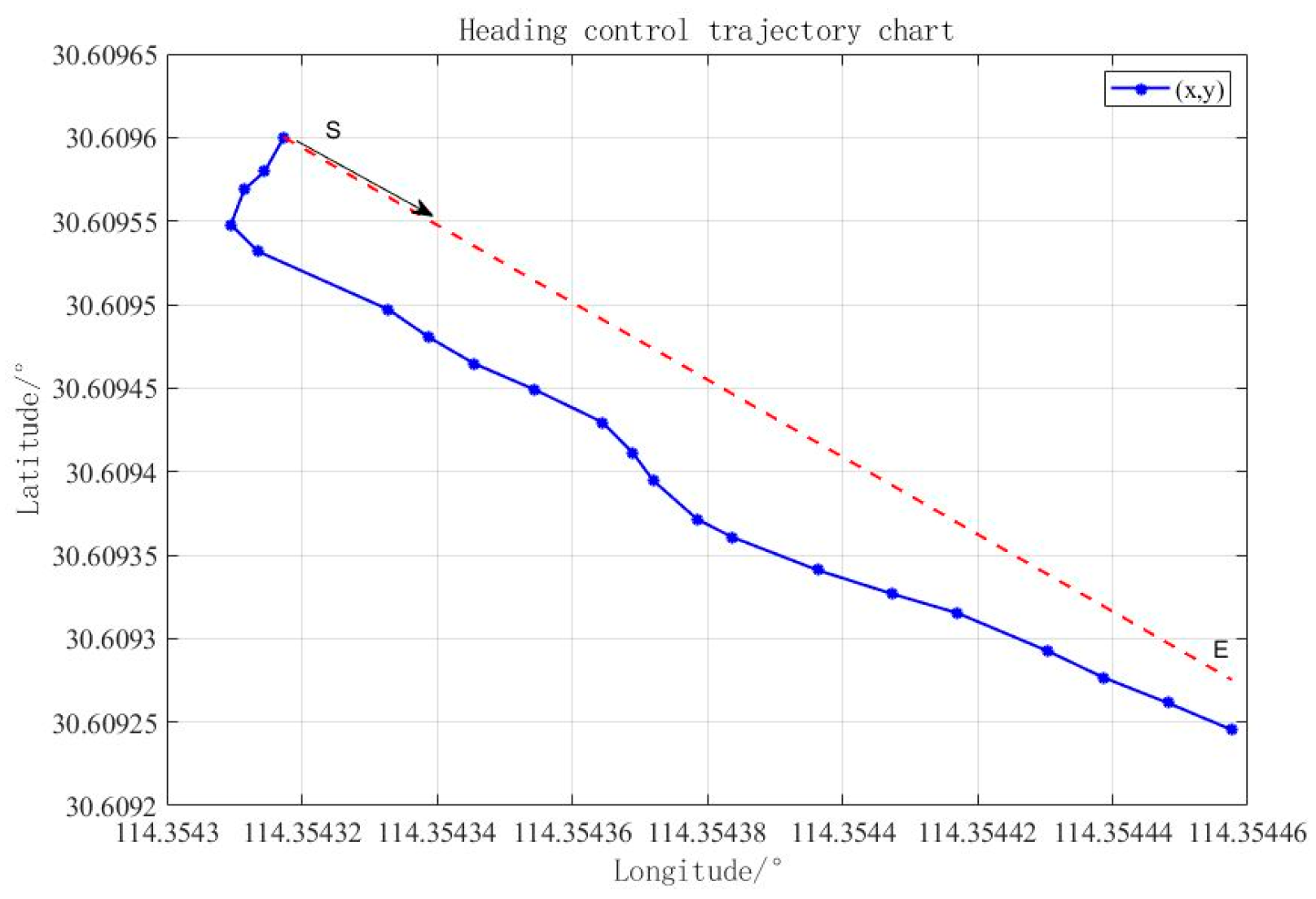
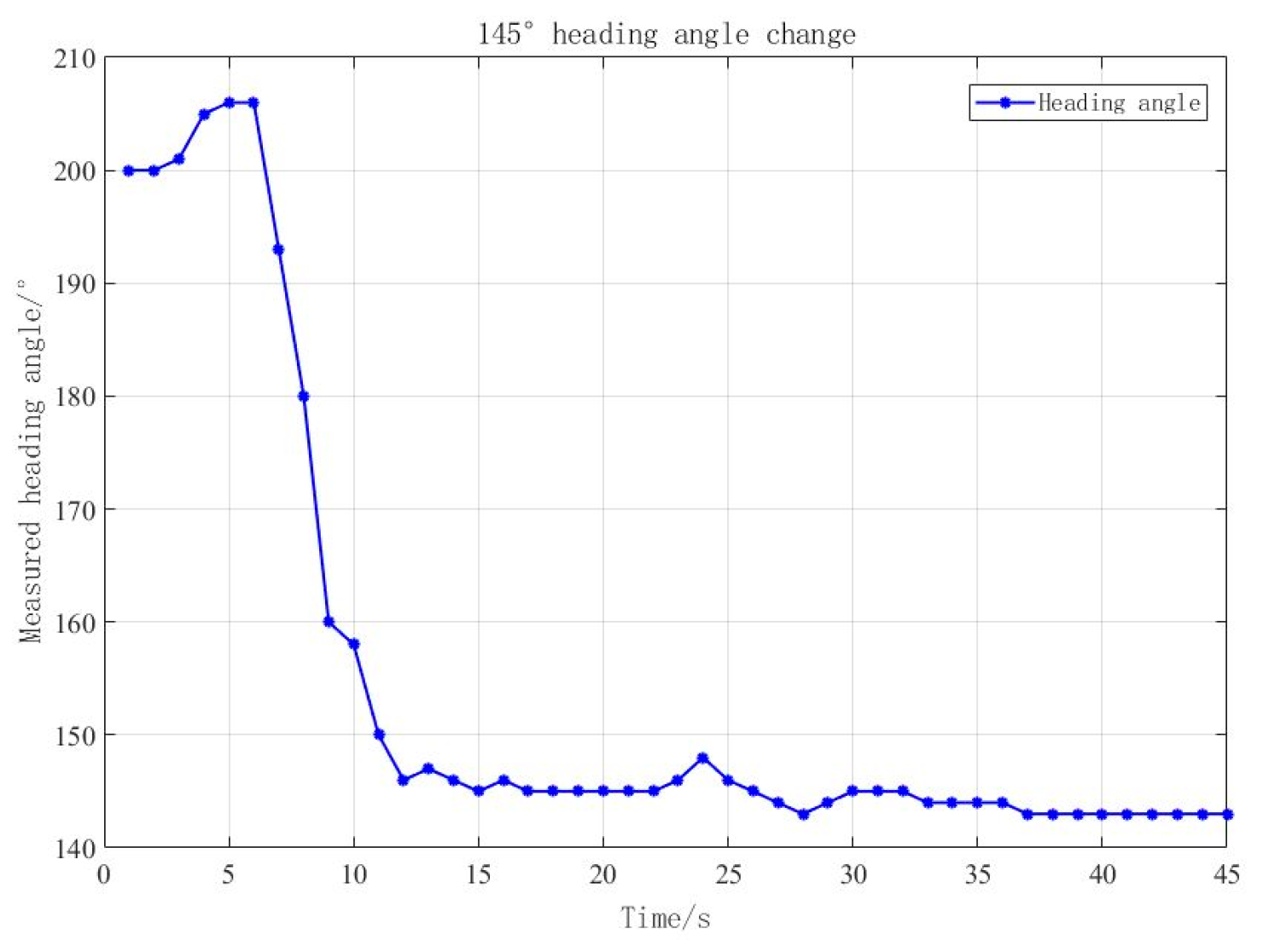
5.1. Heading Control Experiment
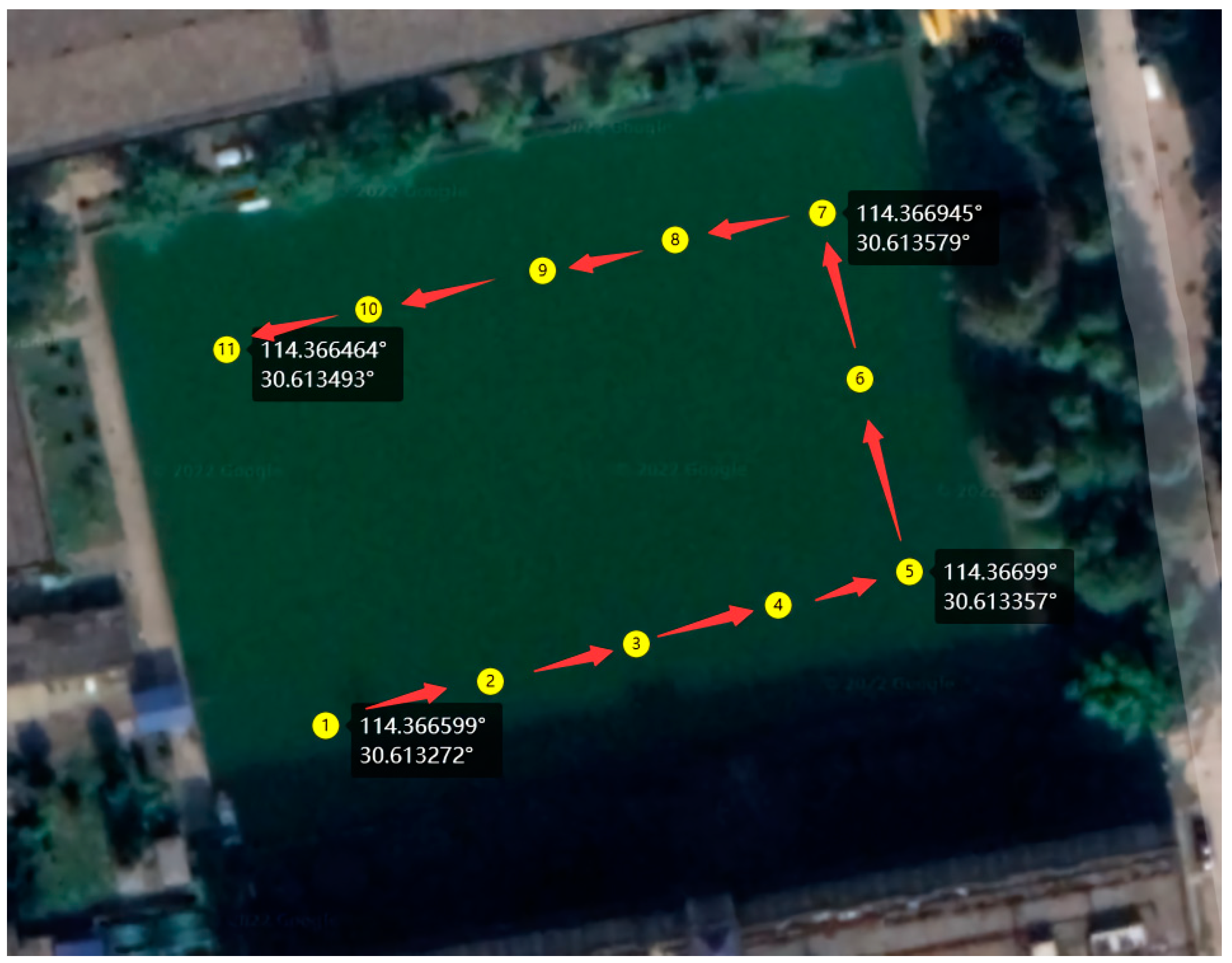
5.2. Multi-Point Trajectory Tracking Experiment
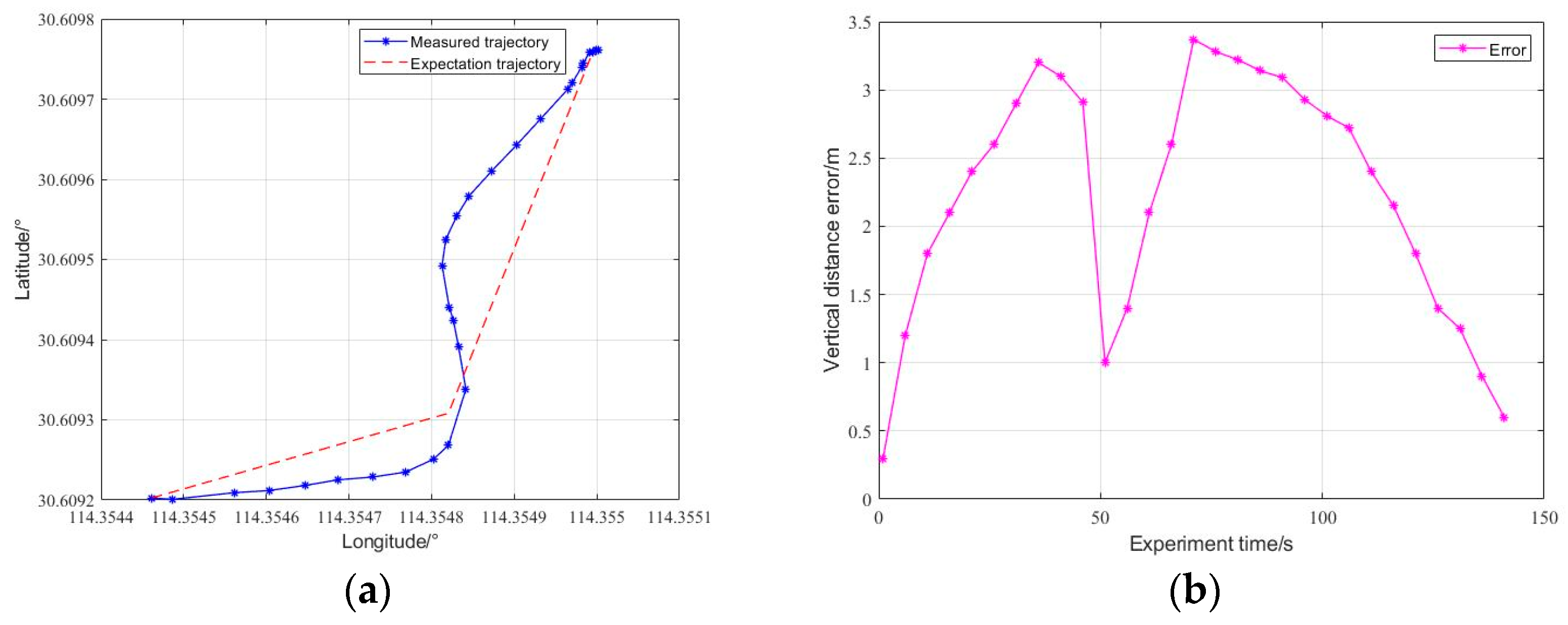
5.2.1. Refractive Line Tracking Experiment
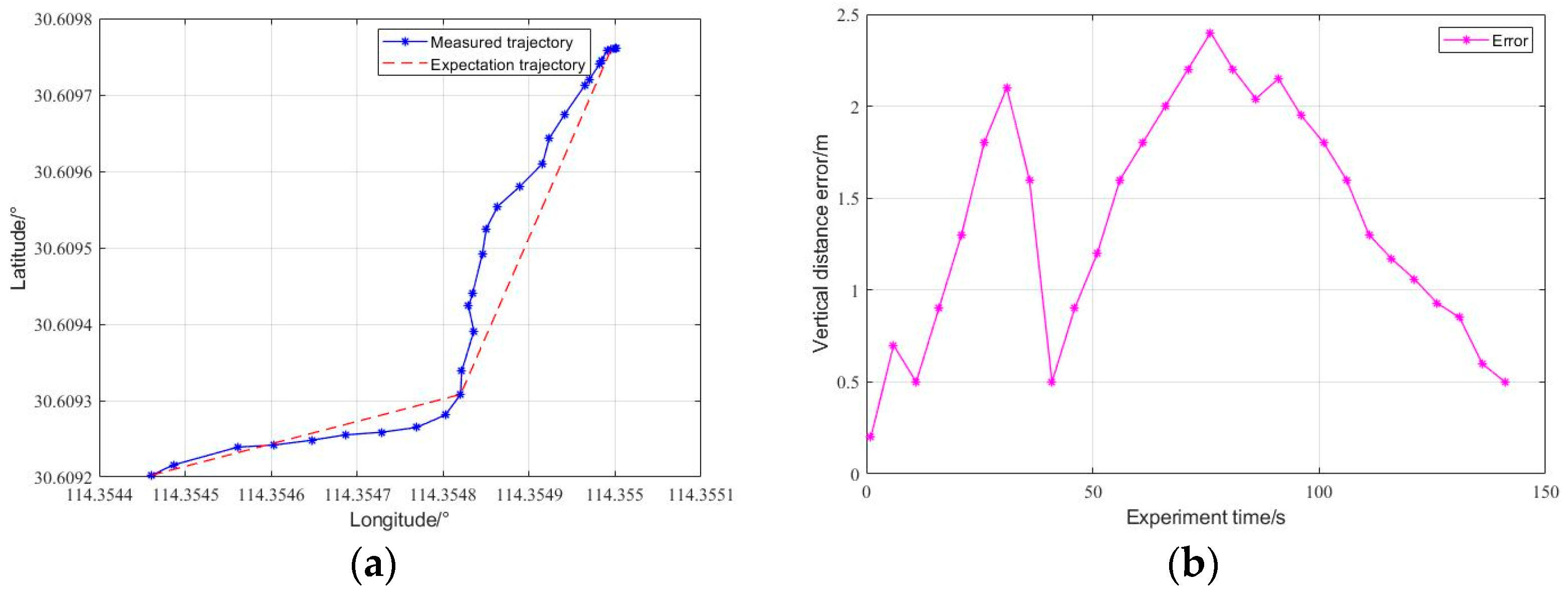
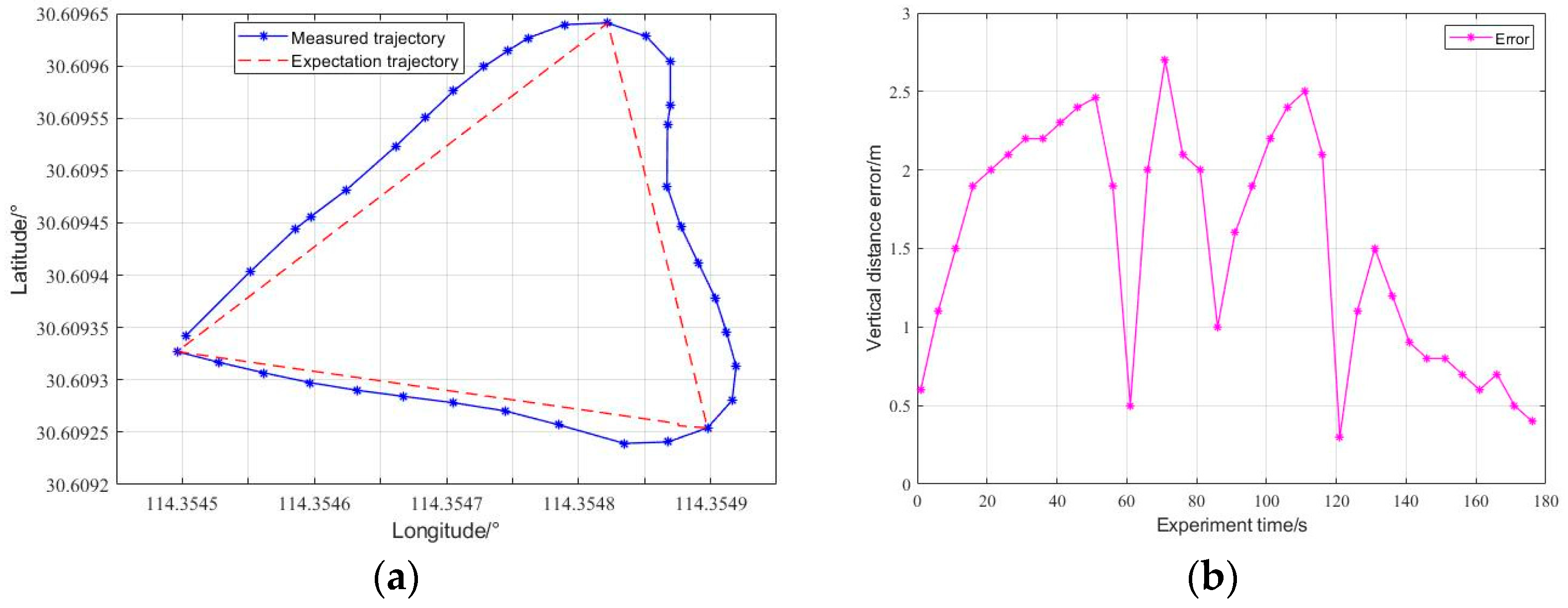
5.2.2. Triangle Tracking Experiment
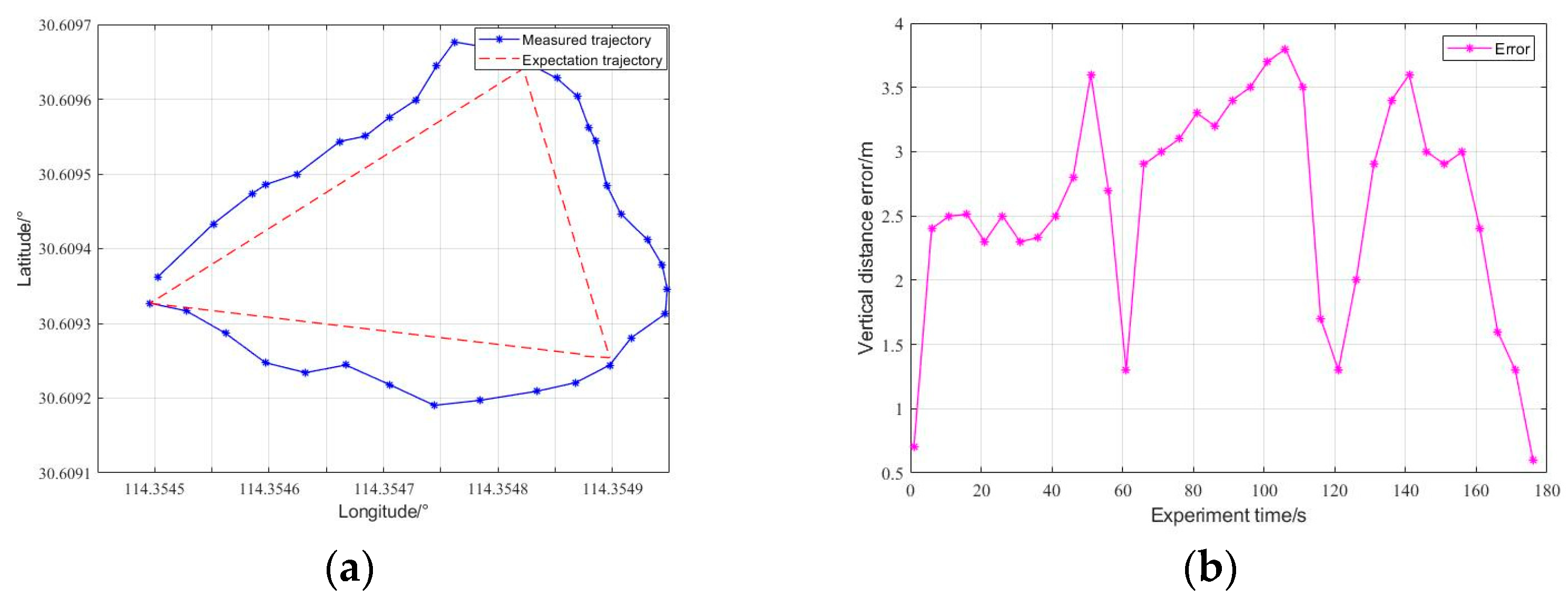
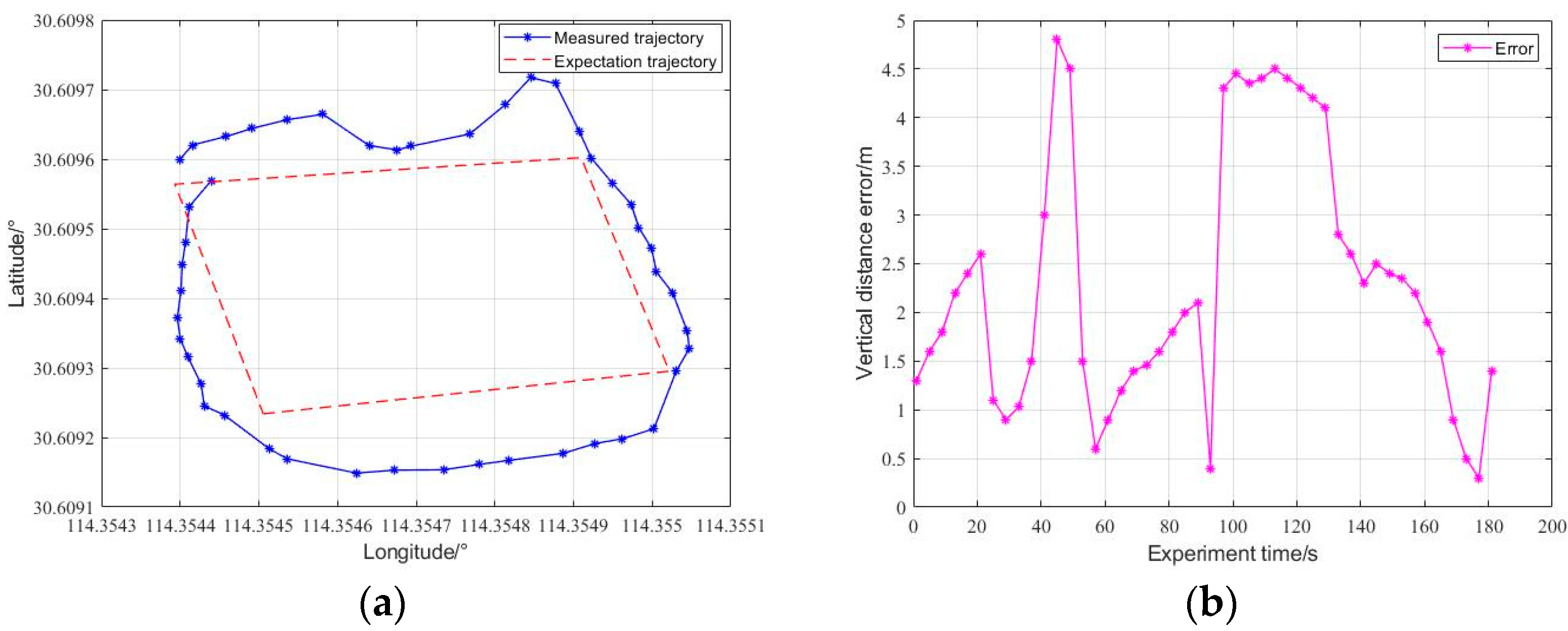
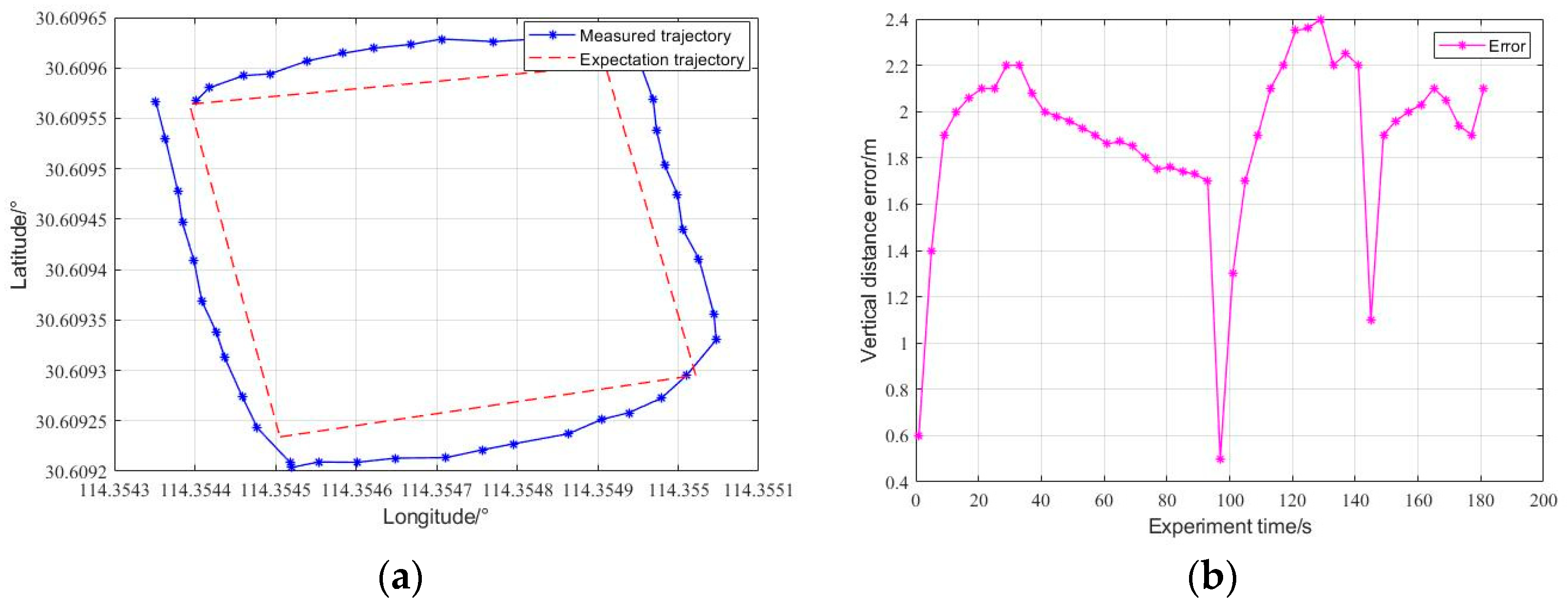
5.2.3. Quadrilateral Tracking Experiment
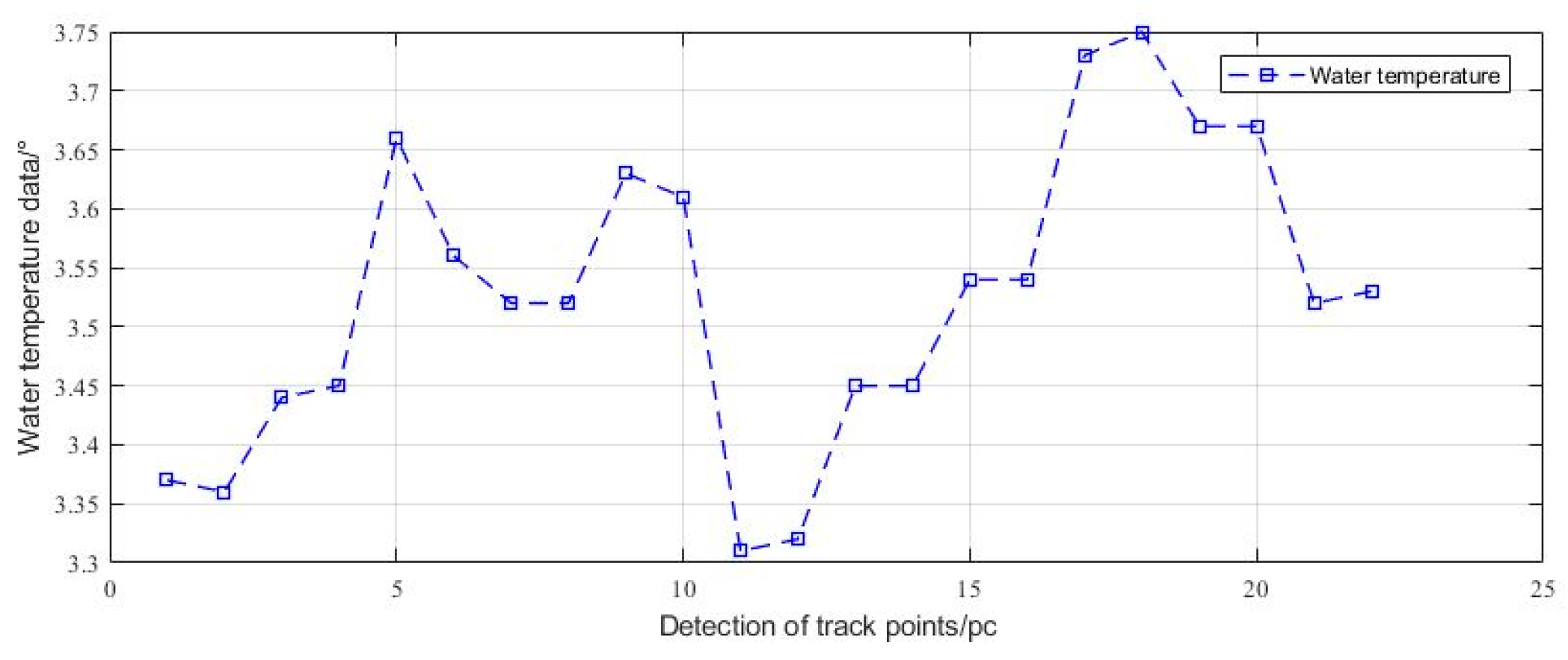
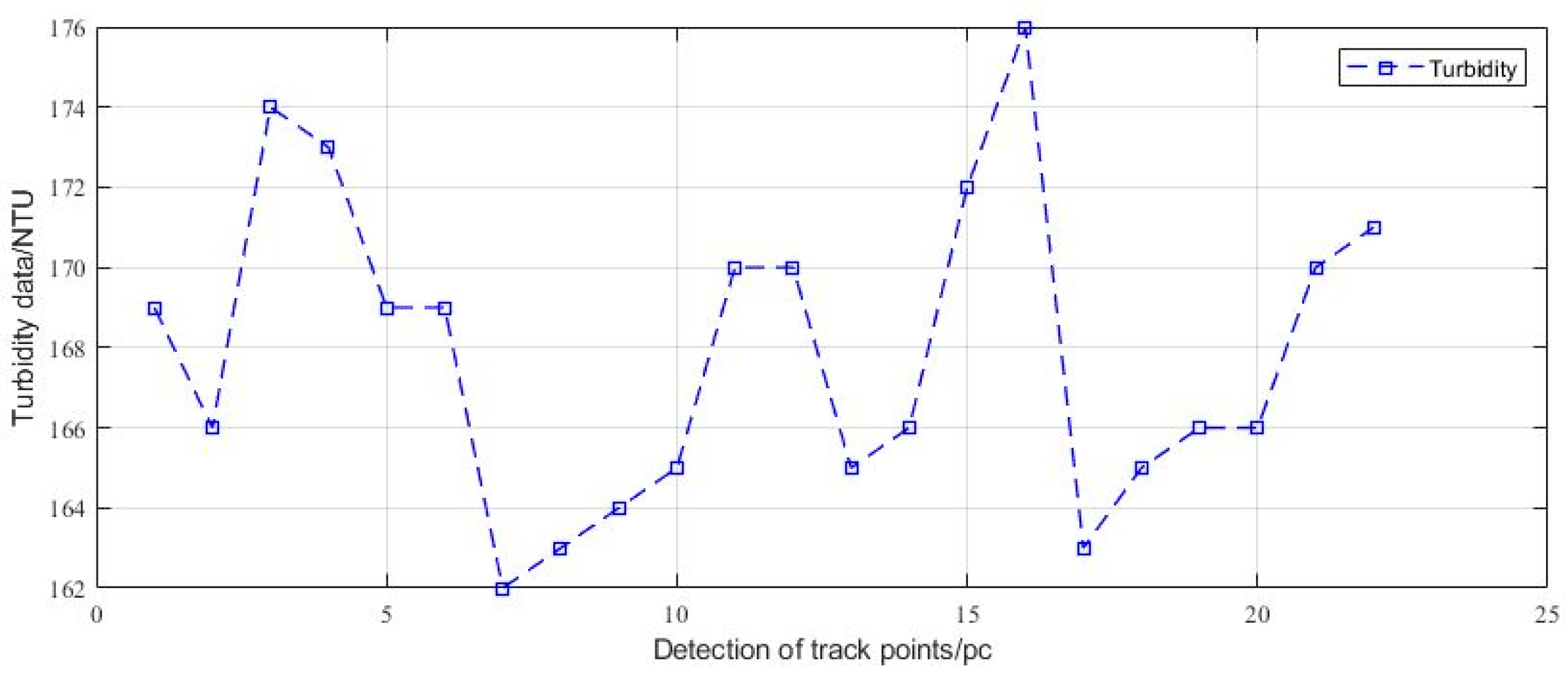
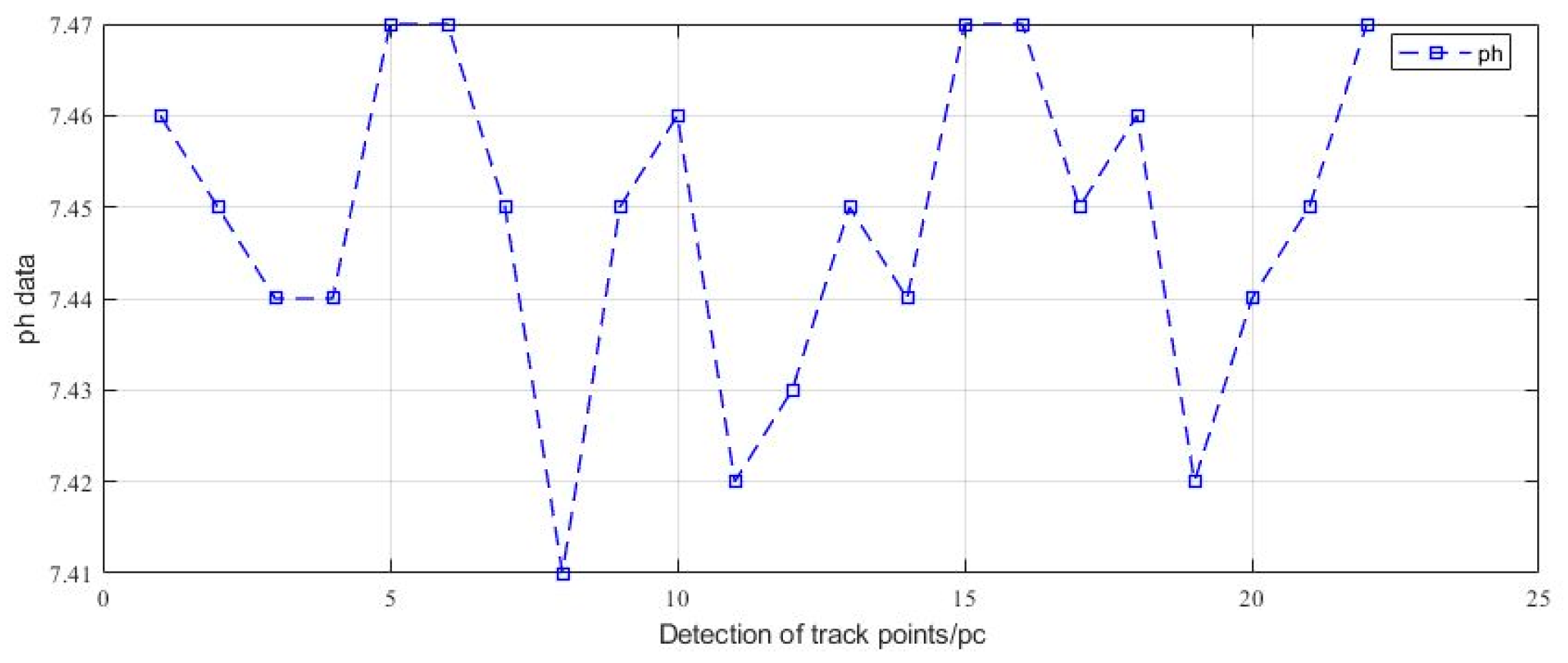
5.3. Water Quality Test
5.4. Summary
6. Conclusions
- The intelligent control system of the USV was designed from the perspective of low cost and small volume, which provides perfect experimental conditions for the subsequent experiments of remote manipulation and autonomous navigation motion control;
- In this paper, a mathematical model of the simplified planar motion of the unmanned ship was established to lay the foundation for the subsequent research. We combined the symmetrical two-motor structure of the unmanned ship and its type to establish a mathematical model of the motion of the two thrusters. Through simulation experiments, combined with the actual steering control, we derived the mapping relationship between rudder angle and motor speed;
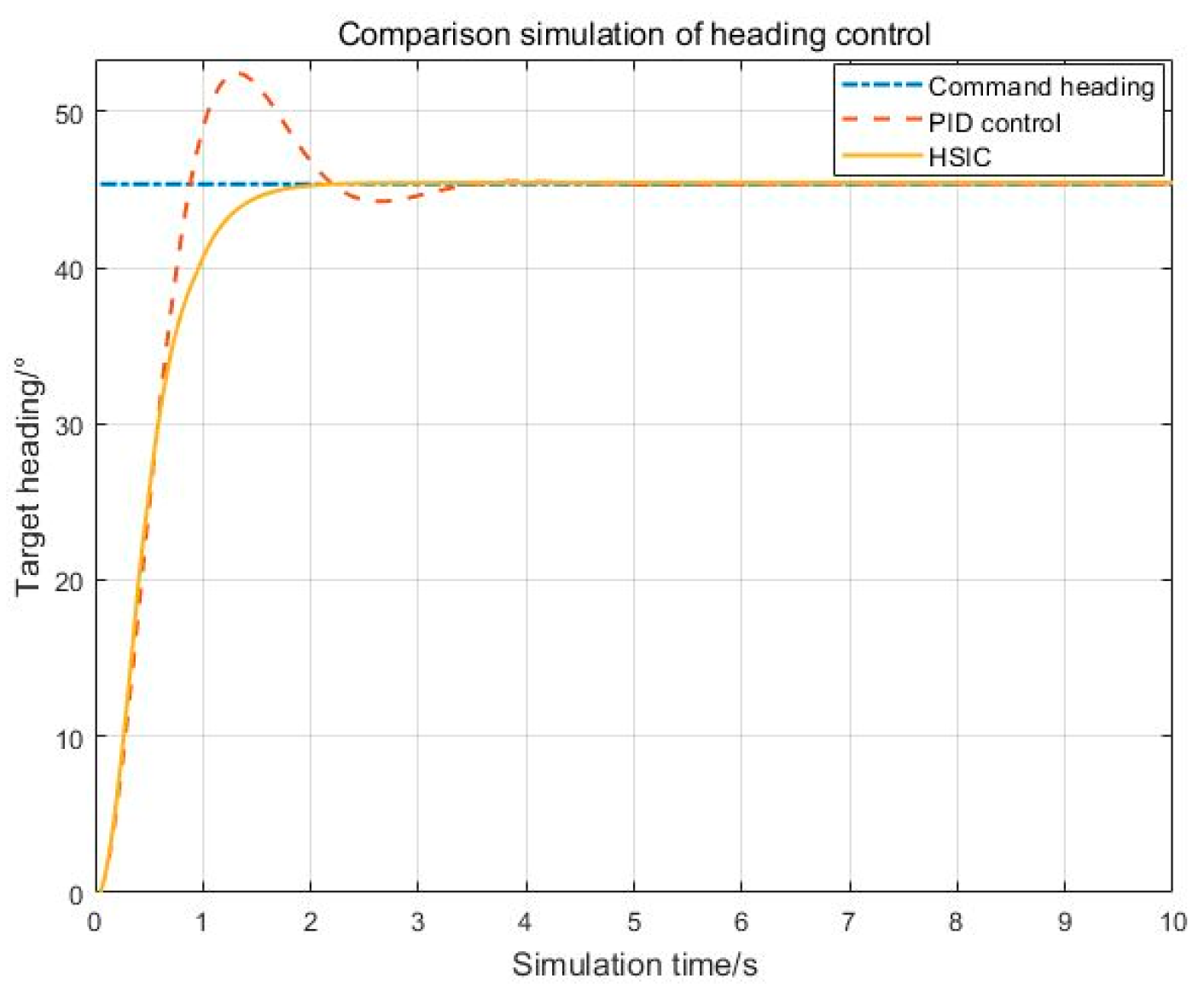
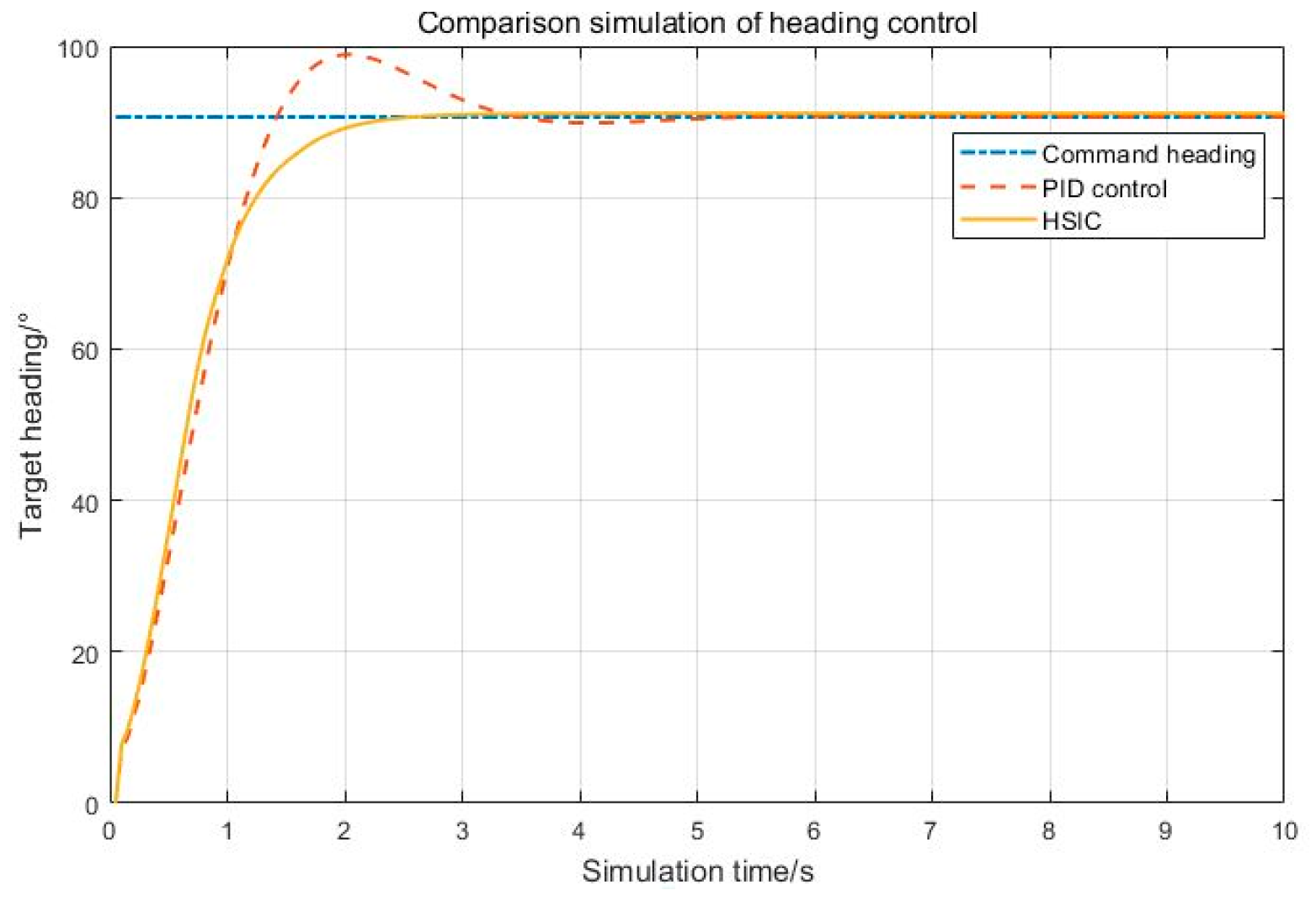
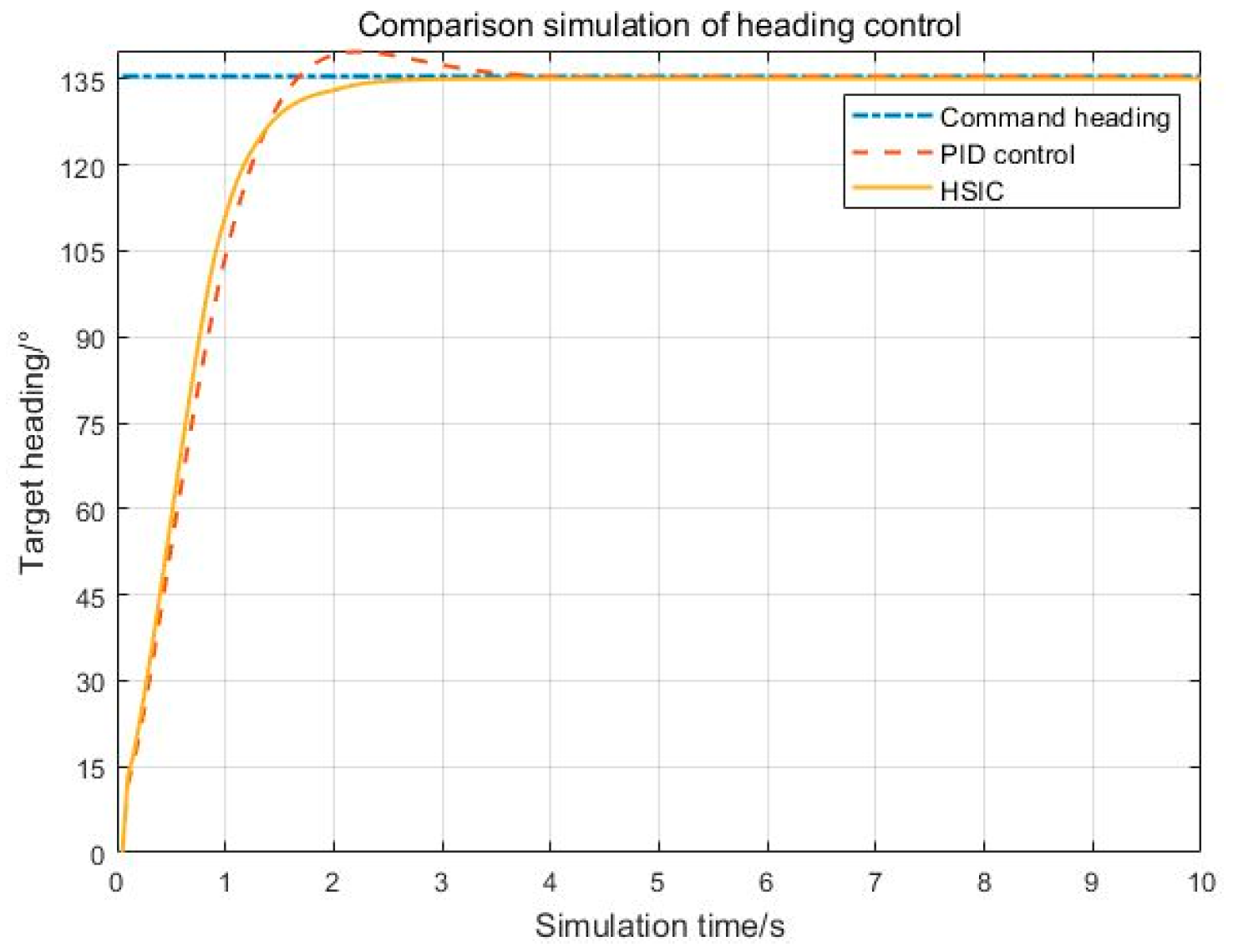
- For the underlying motion control, the HSIC humanoid intelligent motion control strategy was introduced and compared with the PID control method for simulation, and the simulation verified the stability and feasibility of the algorithm;
- In view of the large deviation and steering problems of the line-of-sight (LOS) algorithm, the trajectory correction and precise steering control strategy was proposed, and the improved algorithm trajectory tracking accuracy and control practicality were verified by the designed and completed multi-point trajectory tracking experiments, and the autonomous water quality fixed-point detection function was realized.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Qiu, B.; Wang, G.; Fan, Y.; Mu, D.; Sun, X. Path Following of Underactuated Unmanned Surface Vehicle Based on Trajectory Linearization Control with Input Saturation and External Disturbances. Int. J. Control Autom. Syst. 2020, 18, 2108–2119. [Google Scholar] [CrossRef]
- Karaki, A.A.; Bibuli, M.; Caccia, M.; Ferrando, I.; Gagliolo, S.; Odetti, A.; Sguerso, D. Multi-Platforms and Multi-Sensors Integrated Survey for the Submerged and Emerged Areas. J. Mar. Sci. Eng. 2022, 10, 753. [Google Scholar] [CrossRef]
- Xu, C.; Hu, J.; Chen, J.; Ge, Y.; Liang, R. Sensor Placement with Two-Dimensional Equal Arc Length Non-Uniform Sampling for Underwater Terrain Deformation Monitoring. J. Mar. Sci. Eng. 2021, 9, 954. [Google Scholar] [CrossRef]
- Allen, J.; Iglesias, G.; Greaves, D.; Miles, J. Physical Modelling of the Effect on the Wave Field of the WaveCat Wave Energy Converter. J. Mar. Sci. Eng. 2021, 9, 309. [Google Scholar] [CrossRef]
- Storey, M.V.; van der Gaag, B.; Burns, B.P. Advances in On-Line Drinking Water Quality Monitoring and Early Warning Systems. Water Res. 2011, 45, 741–747. [Google Scholar] [CrossRef] [PubMed]
- de Sousa, J.B.; Andrade Gonçalves, G. Unmanned Vehicles for Environmental Data Collection. Clean Techn. Environ. Policy 2011, 13, 369–380. [Google Scholar] [CrossRef]
- Bonastre, A.; Ors, R.; Capella, J.V.; Fabra, M.J.; Peris, M. In-Line Chemical Analysis of Wastewater: Present and Future Trends. TrAC Trends Anal. Chem. 2005, 24, 128–137. [Google Scholar] [CrossRef]
- Greenwood, R.; Mills, G.A.; Roig, B. Introduction to Emerging Tools and Their Use in Water Monitoring. TrAC Trends Anal. Chem. 2007, 26, 263–267. [Google Scholar] [CrossRef]
- Scholin, C.; Doucette, G.; Jensen, S.; Roman, B.; Pargett, D.; Marin, R.; Preston, C.; Jones, W.; Feldman, J.; Everlove, C.; et al. Remote Detection of Marine Microbes, Small Invertebrates, Harmful Algae, and Biotoxins Using the Environmental Sample Processor (Esp). Oceanography 2009, 22, 158–167. [Google Scholar] [CrossRef]
- Matos, A.; Cruz, N. Positioning Control of an Underactuated Surface Vessel. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–5. [Google Scholar]
- Breivik, M.; Hovstein, V.E.; Fossen, T.I. Straight-Line Target Tracking for Unmanned Surface Vehicles. MIC J. 2008, 29, 131–149. [Google Scholar] [CrossRef] [Green Version]
- Lin, M.; Zhang, Z.; Pang, Y.; Lin, H.; Ji, Q. Underactuated USV Path Following Mechanism Based on the Cascade Method. Sci. Rep. 2022, 12, 1461. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Liu, C.; Zhang, N.; Ye, Q.; Su, W. Finite-Time Controller Design for the Dynamic Positioning of Ships Considering Disturbances and Actuator Constraints. J. Mar. Sci. Eng. 2022, 10, 1034. [Google Scholar] [CrossRef]
- Borme, D.; Legovini, S.; de Olazabal, A.; Tirelli, V. Diet of Adult Sardine Sardina Pilchardus in the Gulf of Trieste, Northern Adriatic Sea. J. Mar. Sci. Eng. 2022, 10, 1012. [Google Scholar] [CrossRef]
- Huang, J.; Choi, H.-S.; Vu, M.T.; Jung, D.-W.; Choo, K.-B.; Cho, H.-J.; Nam Anh, P.H.; Zhang, R.; Park, J.-H.; Kim, J.-Y.; et al. Study on Position and Shape Effect of the Wings on Motion of Underwater Gliders. J. Mar. Sci. Eng. 2022, 10, 891. [Google Scholar] [CrossRef]
- Ntouras, D.; Papadakis, G.; Belibassakis, K. Ship Bow Wings with Application to Trim and Resistance Control in Calm Water and in Waves. J. Mar. Sci. Eng. 2022, 10, 492. [Google Scholar] [CrossRef]
- Wu, R.; Du, J. Adaptive Robust Course-Tracking Control of Time-Varying Uncertain Ships with Disturbances. Int. J. Control Autom. Syst. 2019, 17, 1847–1855. [Google Scholar] [CrossRef]
- Fang, Y.; Pang, M.; Wang, B. A Course Control System of Unmanned Surface Vehicle (USV) Using Back-Propagation Neural Network (BPNN) and Artificial Bee Colony (ABC) Algorithm. Procedia Comput. Sci. 2017, 111, 361–366. [Google Scholar] [CrossRef]
- Choi, W.; Kang, H.; Lee, J. Robust Localization of Unmanned Surface Vehicle Using DDQN-AM. Int. J. Control Autom. Syst. 2021, 19, 1920–1930. [Google Scholar] [CrossRef]
- Qi, Y.; Yu, W.; Huang, J.; Yu, Y. Model Predictive Control for Switched Systems with a Novel Mixed Time/Event-Triggering Mechanism. Nonlinear Anal. Hybrid Syst. 2021, 42, 101081. [Google Scholar] [CrossRef]
- Islam, M.M.; Siffat, S.A.; Ahmad, I.; Liaquat, M. Robust Integral Backstepping and Terminal Synergetic Control of Course Keeping for Ships. Ocean. Eng. 2021, 221, 108532. [Google Scholar] [CrossRef]
- Maurya, P.; Aguiar, A.P.; Pascoal, A. Marine Vehicle Path Following Using Inner-Outer Loop Control. IFAC Proc. Vol. 2009, 42, 38–43. [Google Scholar] [CrossRef]
- Min, B.; Zhang, X. Concise Robust Fuzzy Nonlinear Feedback Track Keeping Control for Ships Using Multi-Technique Improved LOS Guidance. Ocean. Eng. 2021, 224, 108734. [Google Scholar] [CrossRef]
- Gonzalez-Garcia, A.; Barragan-Alcantar, D.; Collado-Gonzalez, I.; Garrido, L. Adaptive Dynamic Programming and Deep Reinforcement Learning for the Control of an Unmanned Surface Vehicle: Experimental Results. Control. Eng. Pract. 2021, 111, 104807. [Google Scholar] [CrossRef]
- Kim, D.; Shin, J.-U.; Kim, H.; Kim, H.; Lee, D.; Lee, S.-M.; Myung, H. Development and Experimental Testing of an Autonomous Jellyfish Detection and Removal Robot System. Int. J. Control Autom. Syst. 2016, 14, 312–322. [Google Scholar] [CrossRef]
- Fossen, T.I. Guidance and Control of Ocean Vehicles. Doctors Thesis, University of Trondheim, Trondheim, Norway, 1999. Printed by John Wiley & Sons: Chichester, UK, 1999; ISBN 0-471-94113-1.. [Google Scholar]
- Ran, S.; Wang, N.; Pu, H.; Yin, C.; Wang, T.; Wang, T. Adaptive Point Stabilization Control of Two-Wheel Robot with Parameter Uncertainties Based on Human-Simulated Intelligent Backstepping Method. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 3915–3920. [Google Scholar]
- Qiu, B.; Wang, G.; Fan, Y. Predictor LOS-Based Trajectory Linearization Control for Path Following of Underactuated Unmanned Surface Vehicle with Input Saturation. Ocean. Eng. 2020, 214, 107874. [Google Scholar] [CrossRef]
- Fossen, T.I. Marine Control Systems–Guidance. Navigation, and Control of Ships, Rigs and Underwater Vehicles; Org. Number NO 985 195 005 MVA; Marine Cybernetics: Trondheim, Norway, 2002; ISBN 82-92356-00-2. [Google Scholar]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Numerical Size |
|---|---|
| USV Weight | 4.60 kg |
| Draught Depth | 0.06 m |
| Max Speed | 1.80 m/s |
| Motor Rated Speed | 1500 r/min |
| Length | 0.40 m |
| Width | 0.40 m |
| Function | Device |
|---|---|
| Micro Control Unit | Arduino Mega2560 |
| Positioning Unit | GPS |
| Inertial Measurement Unit | JY901 |
| Communication Unit | GPRS |
| Water Quality Testing Unit | Temperature, Turbidity, pH |
| Others | SIM, Motor Controller |
| Options | Configuration Parameters |
|---|---|
| Server IP Address | 39.105.116.226 |
| Port Number | 40002 |
| Connection Type | TCP Long Connections |
| Baud Rate | 115200 |
| Device ID | 20215 |
| Virtual Rudder Angle (°) | Simulated Cycle Radius (m) | Simulated Speed (m/s) | (r/min) | Actual Cycle Radius (m) | Actual Speed (m/s) |
|---|---|---|---|---|---|
| 5 | 2.16 | 0.69 | 975–900 | 2.23 | 0.71 |
| 10 | 1.88 | 0.81 | 1065–900 | 1.88 | 0.81 |
| 15 | 1.42 | 0.82 | 1170–900 | 1.46 | 0.88 |
| 20 | 1.06 | 0.93 | 1290–900 | 1.13 | 0.90 |
| −5 | 2.64 | 1.27 | 1170–1320 | 2.68 | 1.29 |
| −10 | 2.15 | 1.16 | 1065–1320 | 2.19 | 1.17 |
| −15 | 1.76 | 1.15 | 975–1320 | 1.87 | 1.05 |
| −20 | 1.26 | 1.04 | 930–1320 | 1.25 | 0.98 |
| Virtual Rudder Angle | (r/min) | |||
|---|---|---|---|---|
| 5 | 975–900 | 75 | 15 | 0.2 |
| 10 | 1065–900 | 125 | 15 | 0.3 |
| 15 | 1170–900 | 150 | 15 | 0.5 |
| 20 | 1290–900 | 180 | 15 | 0.7 |
| −5 | 1170–1320 | 75 | 15 | 0.2 |
| −10 | 1065–1320 | 125 | 15 | 0.3 |
| −15 | 975–1320 | 150 | 15 | 0.5 |
| −20 | 930–1320 | 180 | 15 | 0.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, Y.; Zhu, H.; Pan, L.; Wang, J. Research on Intelligent Trajectory Control Method of Water Quality Testing Unmanned Surface Vessel. J. Mar. Sci. Eng. 2022, 10, 1252. https://doi.org/10.3390/jmse10091252
Xiong Y, Zhu H, Pan L, Wang J. Research on Intelligent Trajectory Control Method of Water Quality Testing Unmanned Surface Vessel. Journal of Marine Science and Engineering. 2022; 10(9):1252. https://doi.org/10.3390/jmse10091252
Chicago/Turabian StyleXiong, Yong, Haibin Zhu, Lin Pan, and Jiying Wang. 2022. "Research on Intelligent Trajectory Control Method of Water Quality Testing Unmanned Surface Vessel" Journal of Marine Science and Engineering 10, no. 9: 1252. https://doi.org/10.3390/jmse10091252
APA StyleXiong, Y., Zhu, H., Pan, L., & Wang, J. (2022). Research on Intelligent Trajectory Control Method of Water Quality Testing Unmanned Surface Vessel. Journal of Marine Science and Engineering, 10(9), 1252. https://doi.org/10.3390/jmse10091252