
Leakage Fault Diagnosis of Lifting and Lowering Hydraulic System of Wing-Assisted Ships Based on WPT-SVM

 ,
,  and
and
Abstract
:1. Introduction
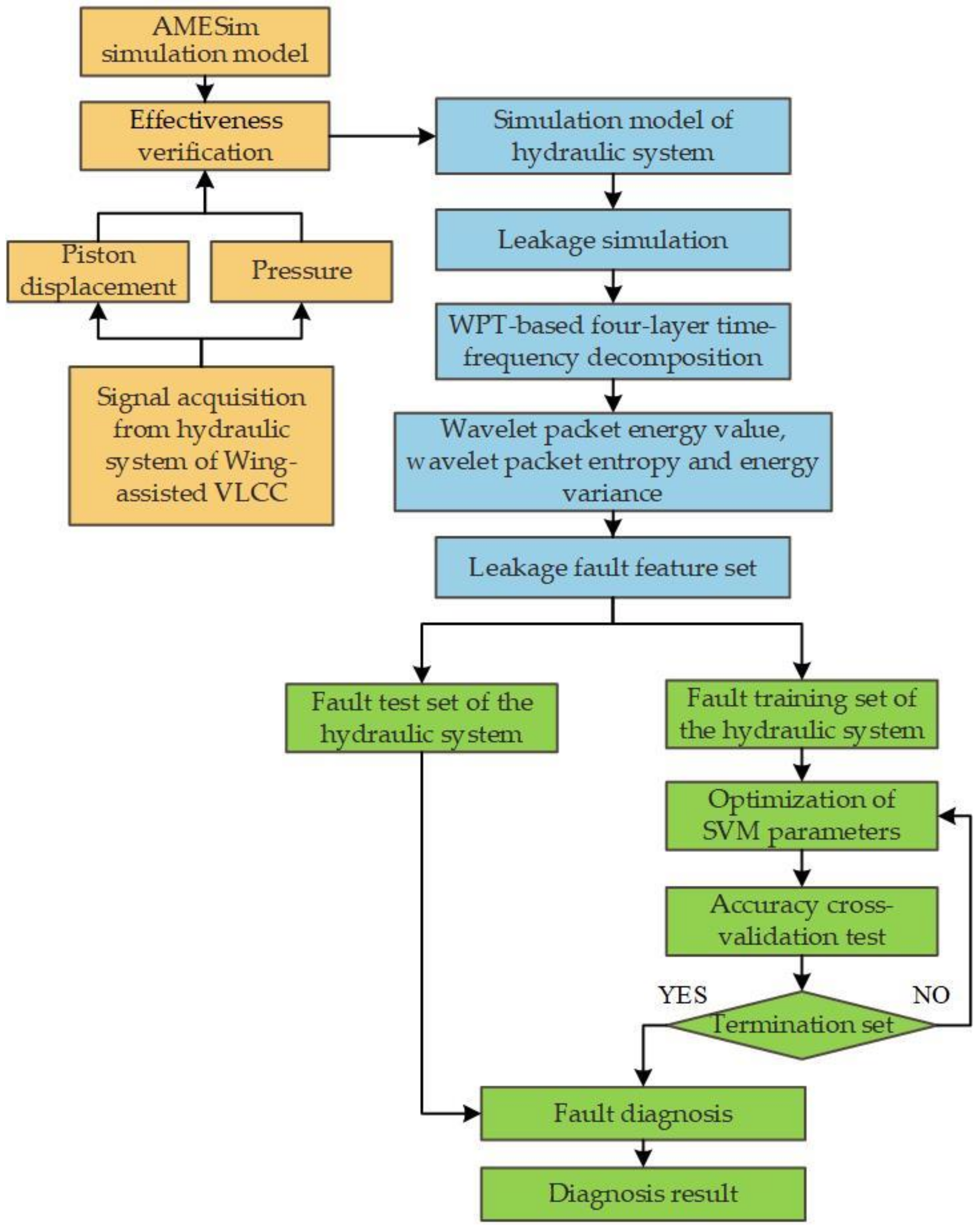
2. WPT-SVM Based Fault Diagnosis Method
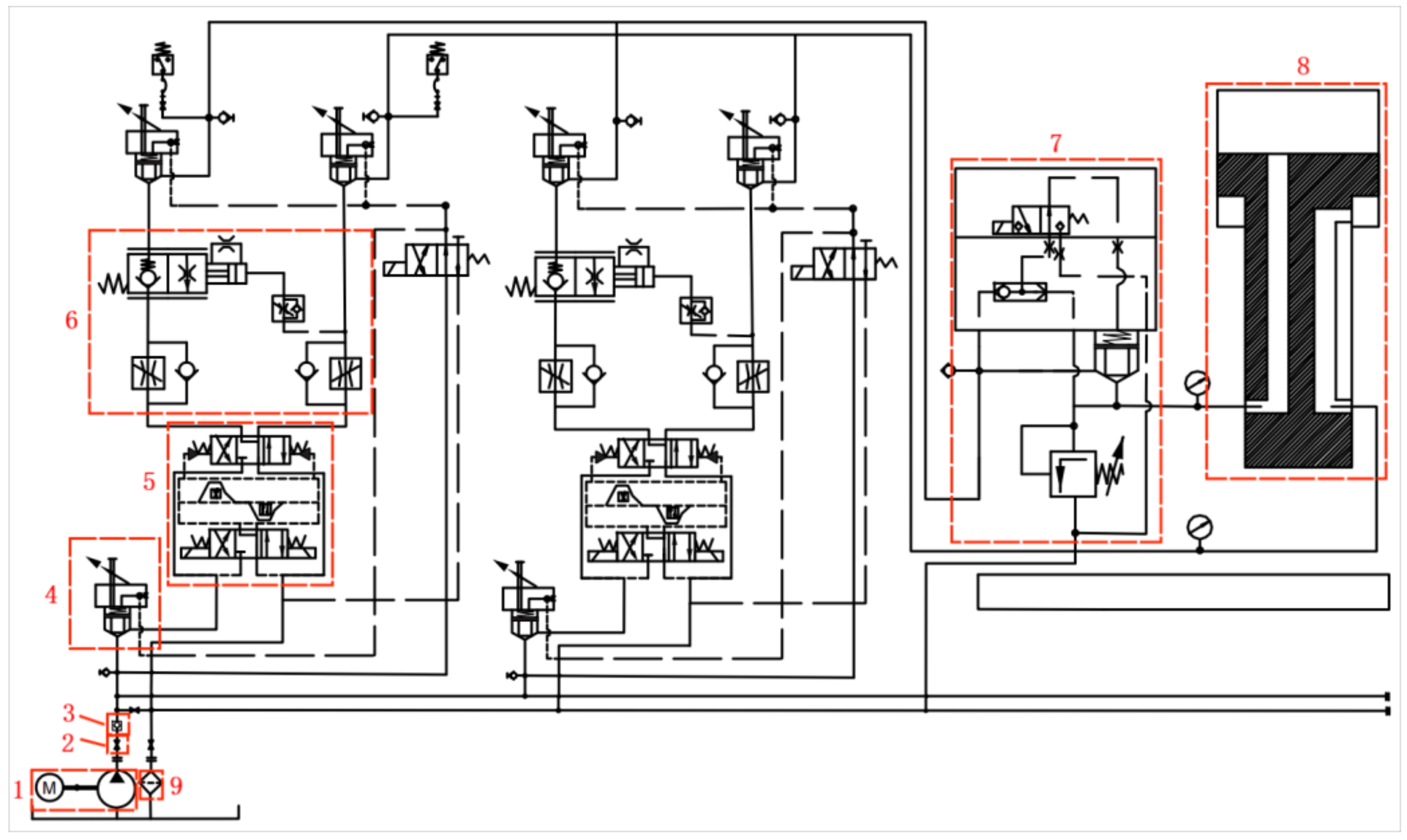
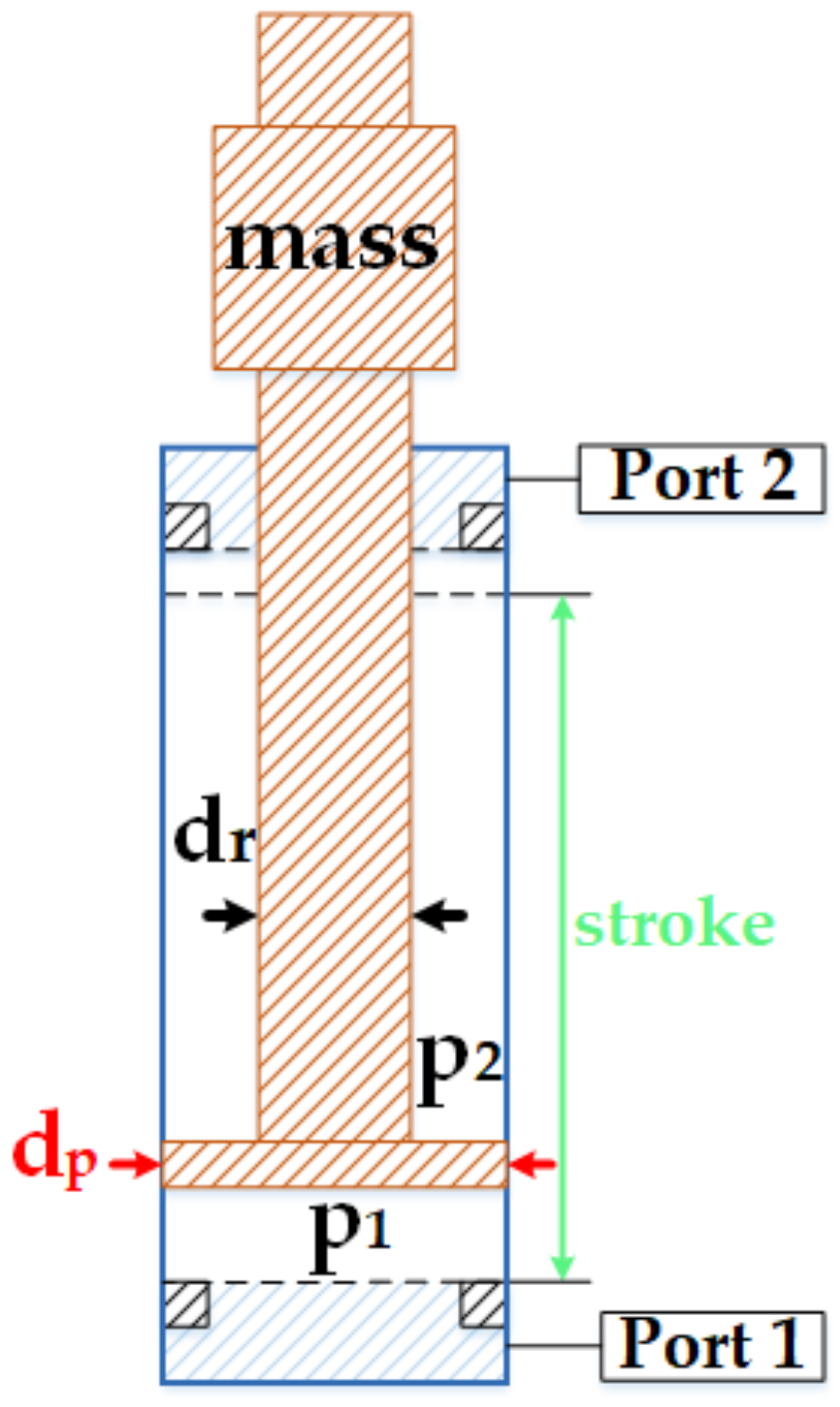
2.1. Modelling of the Wing Lifting and Lowering Hydraulic System
2.2. WPT Based Fault Feature Extraction Method of the Hydraulic System
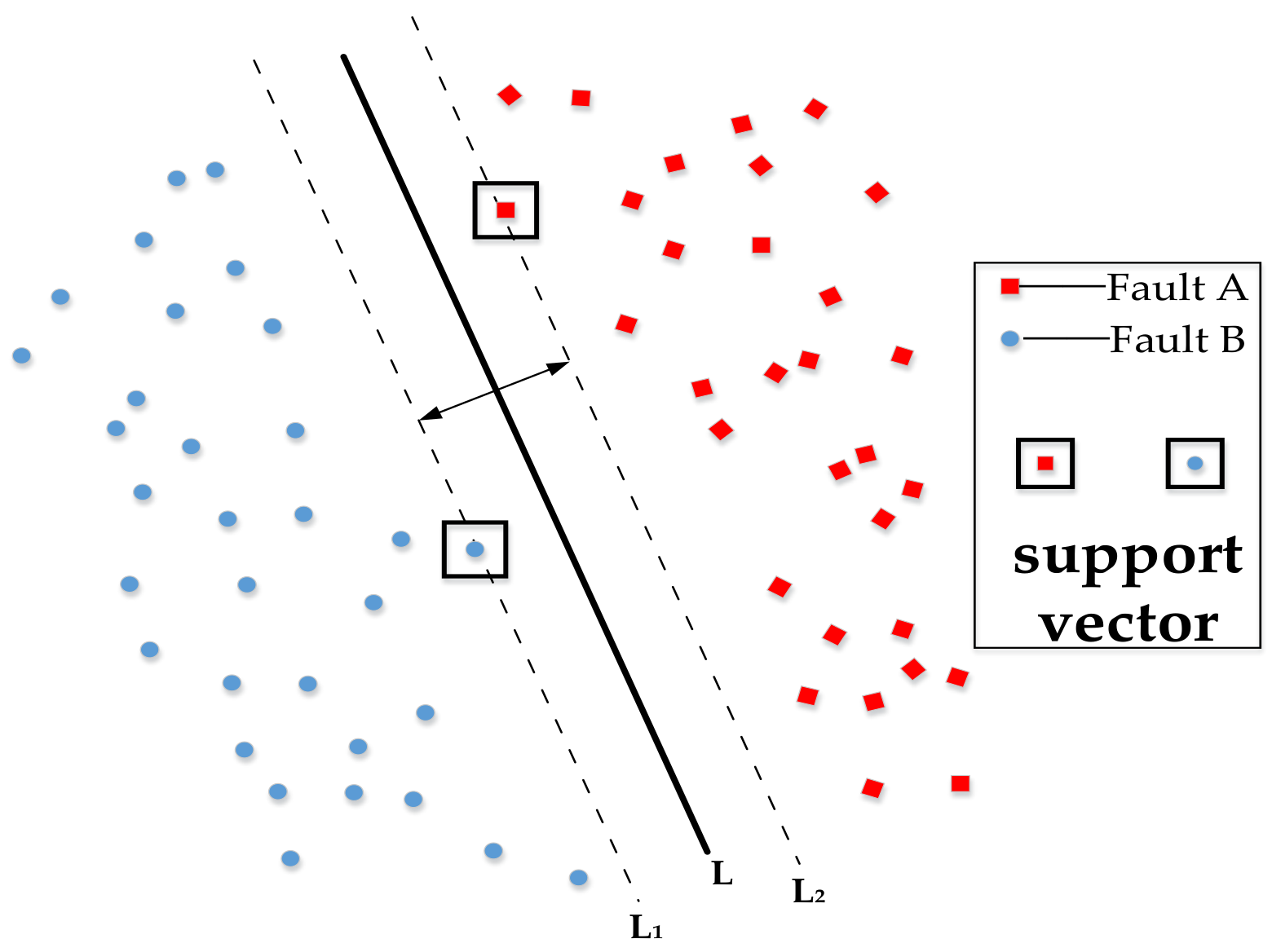
2.3. Classification and Diagnosis Method of Leakage Fault Based on SVM
3. Case Study
3.1. Research Objects
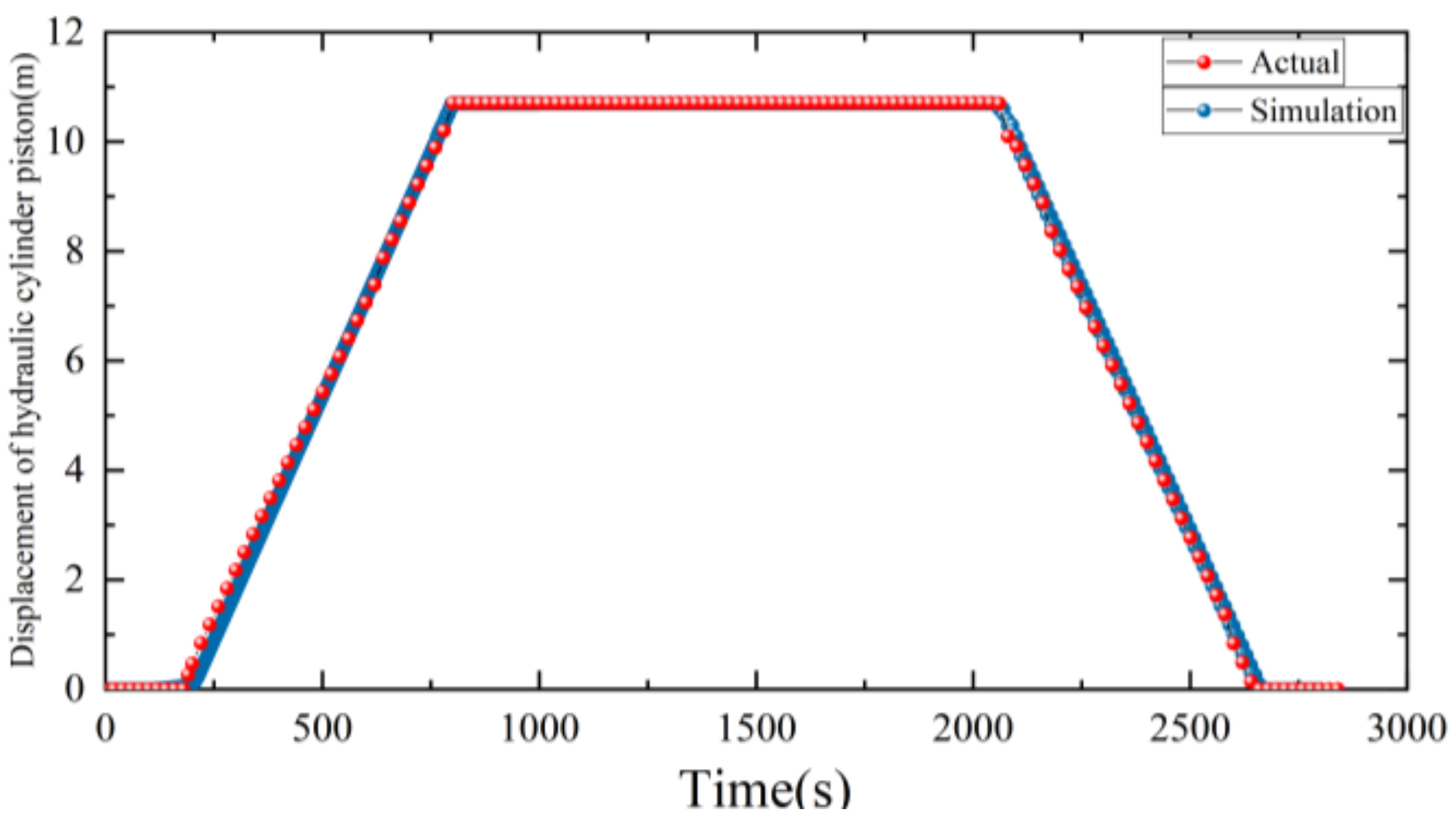
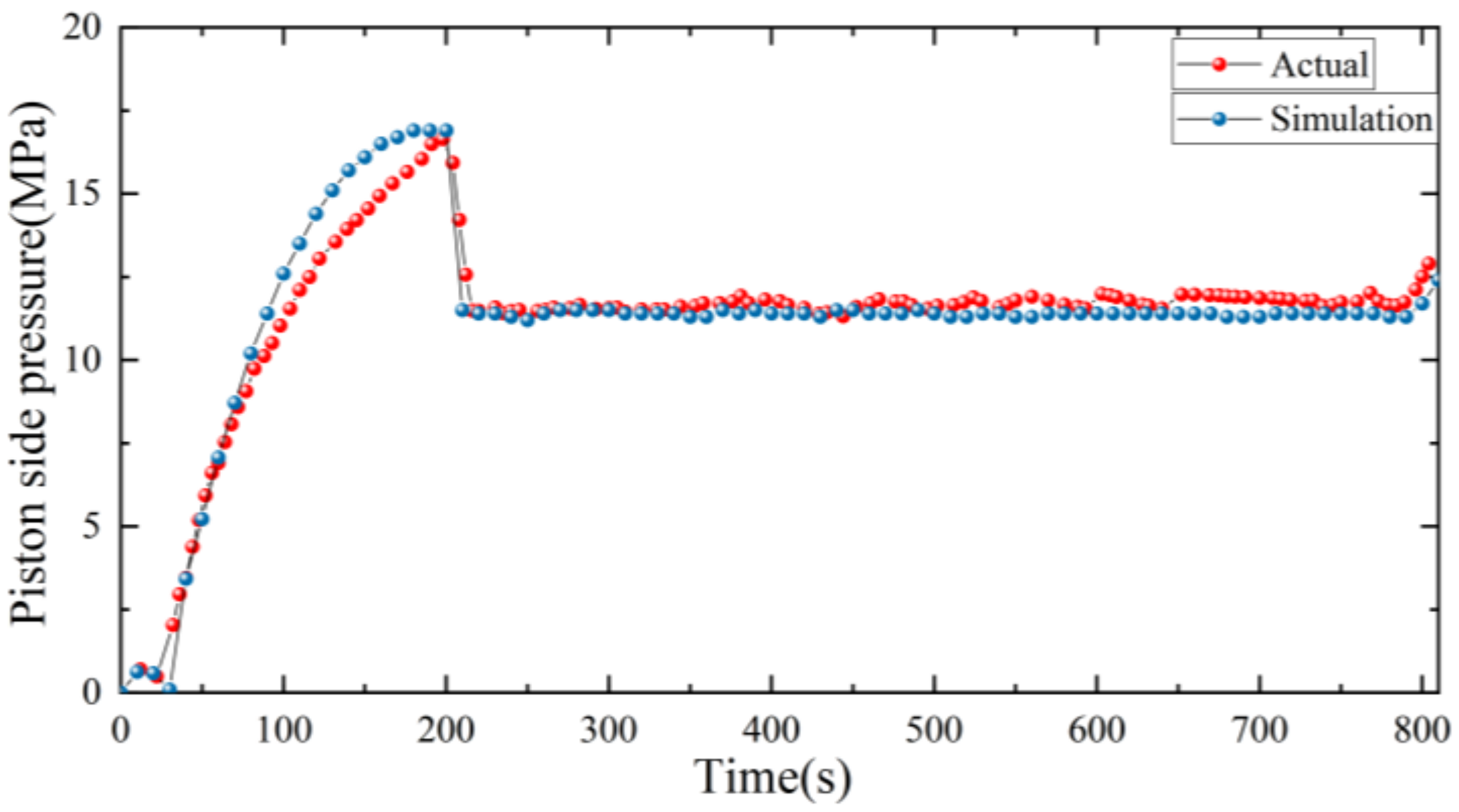
3.2. Effectiveness Analysis of the Model
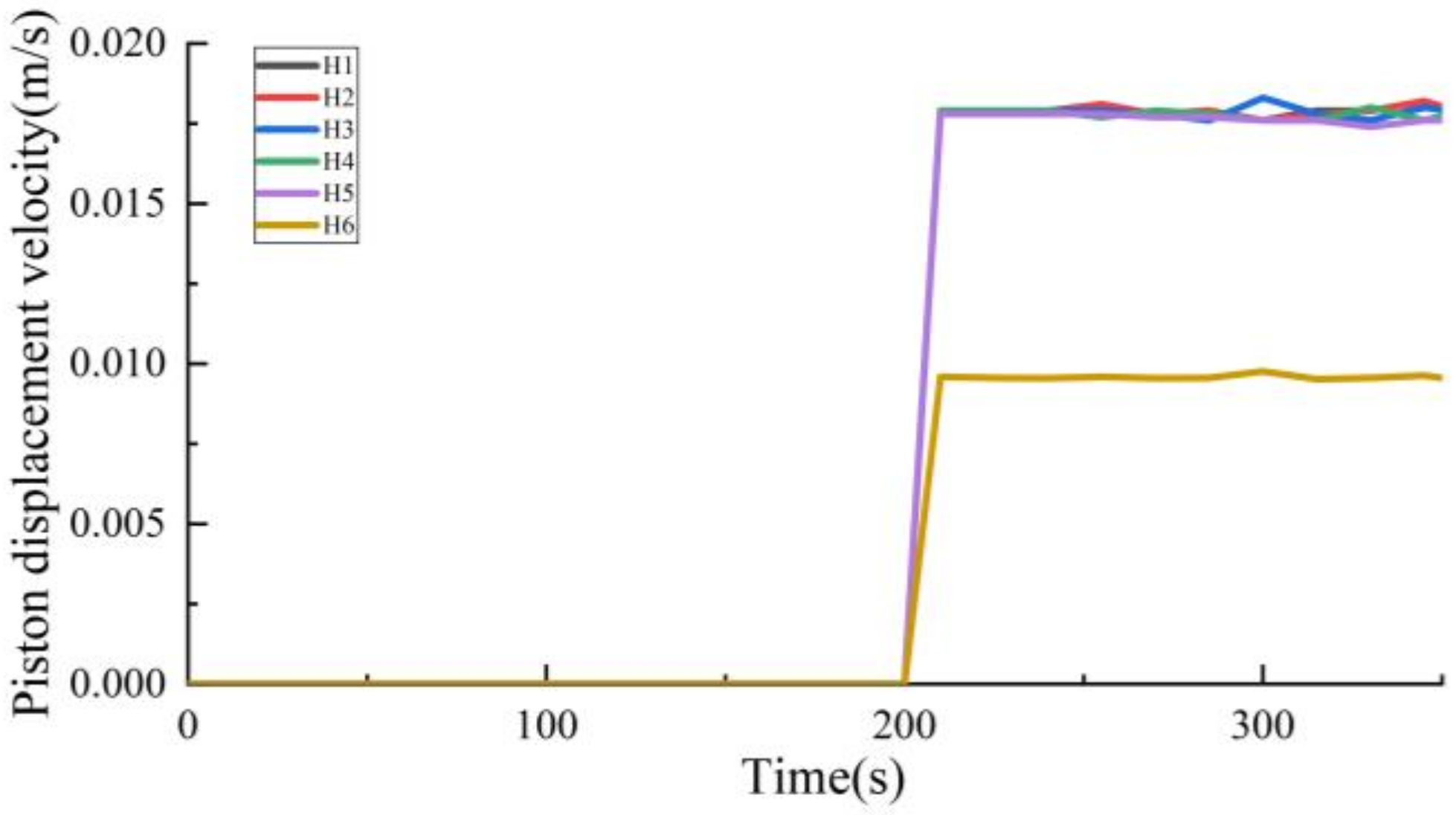
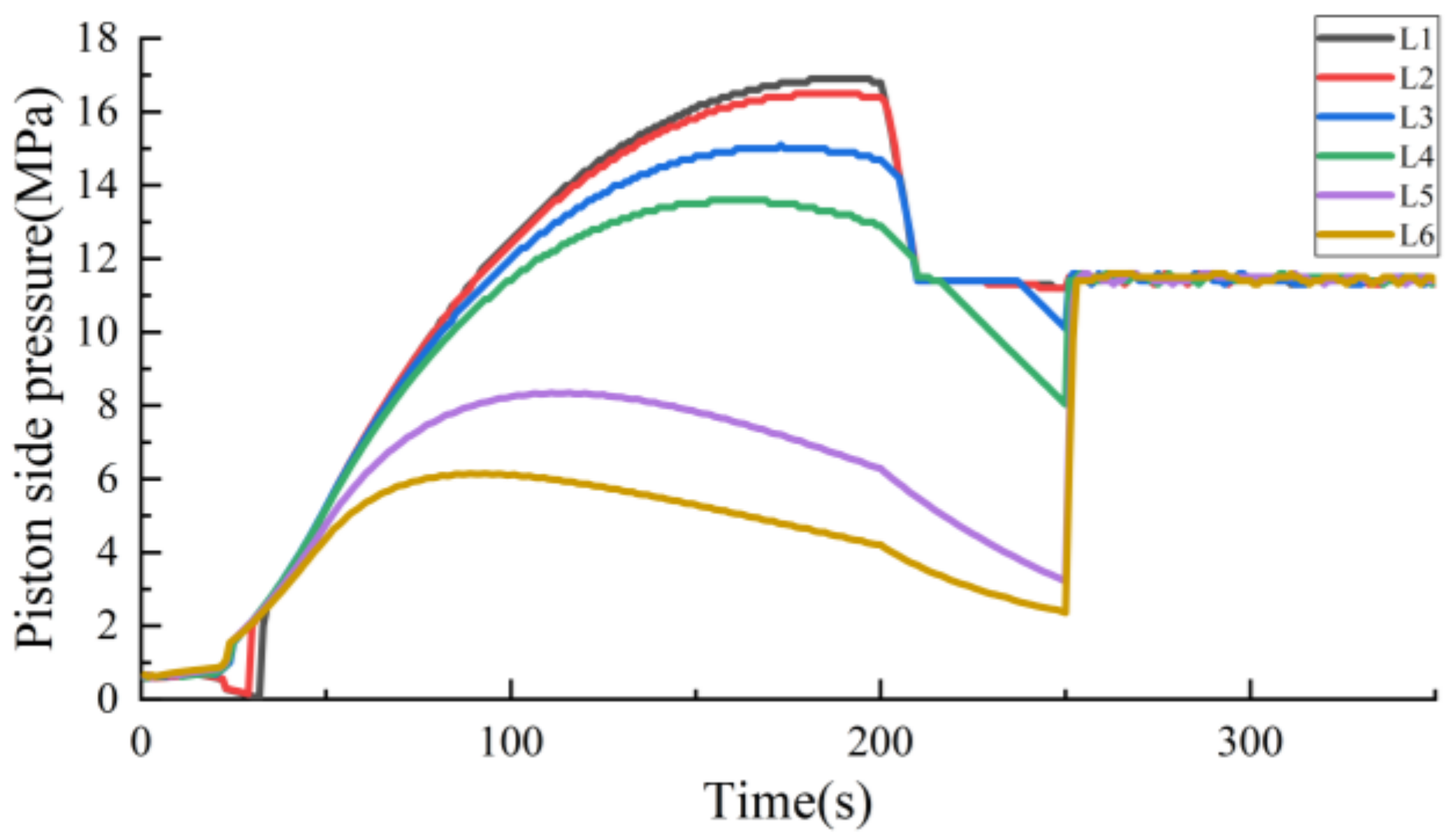
3.3. Leakage Fault Analysis Based on the Established Model
- (1)
- Simulation of leakage in reversing valve
- (2)
- Simulation of leakage in hydraulic cylinder
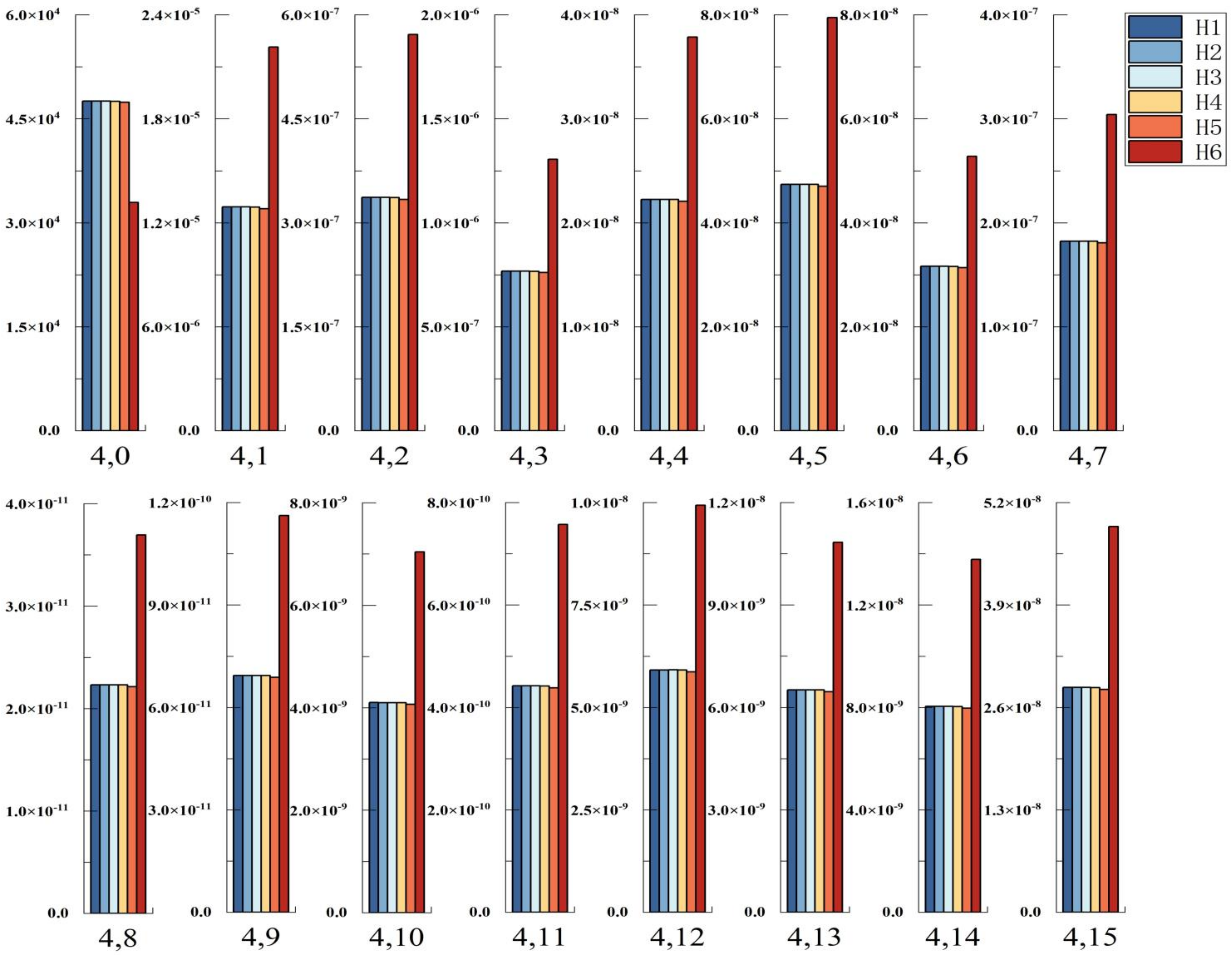
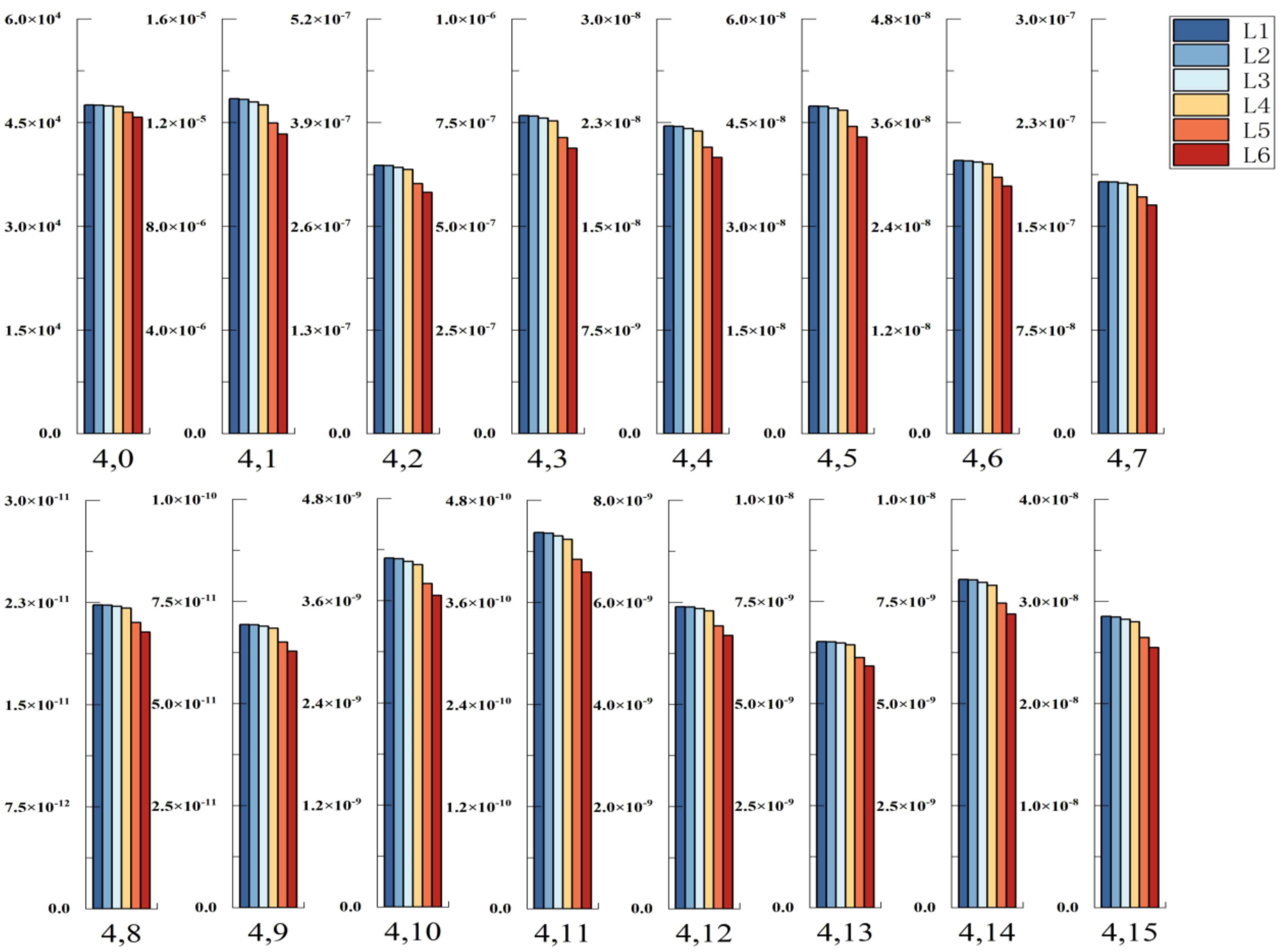
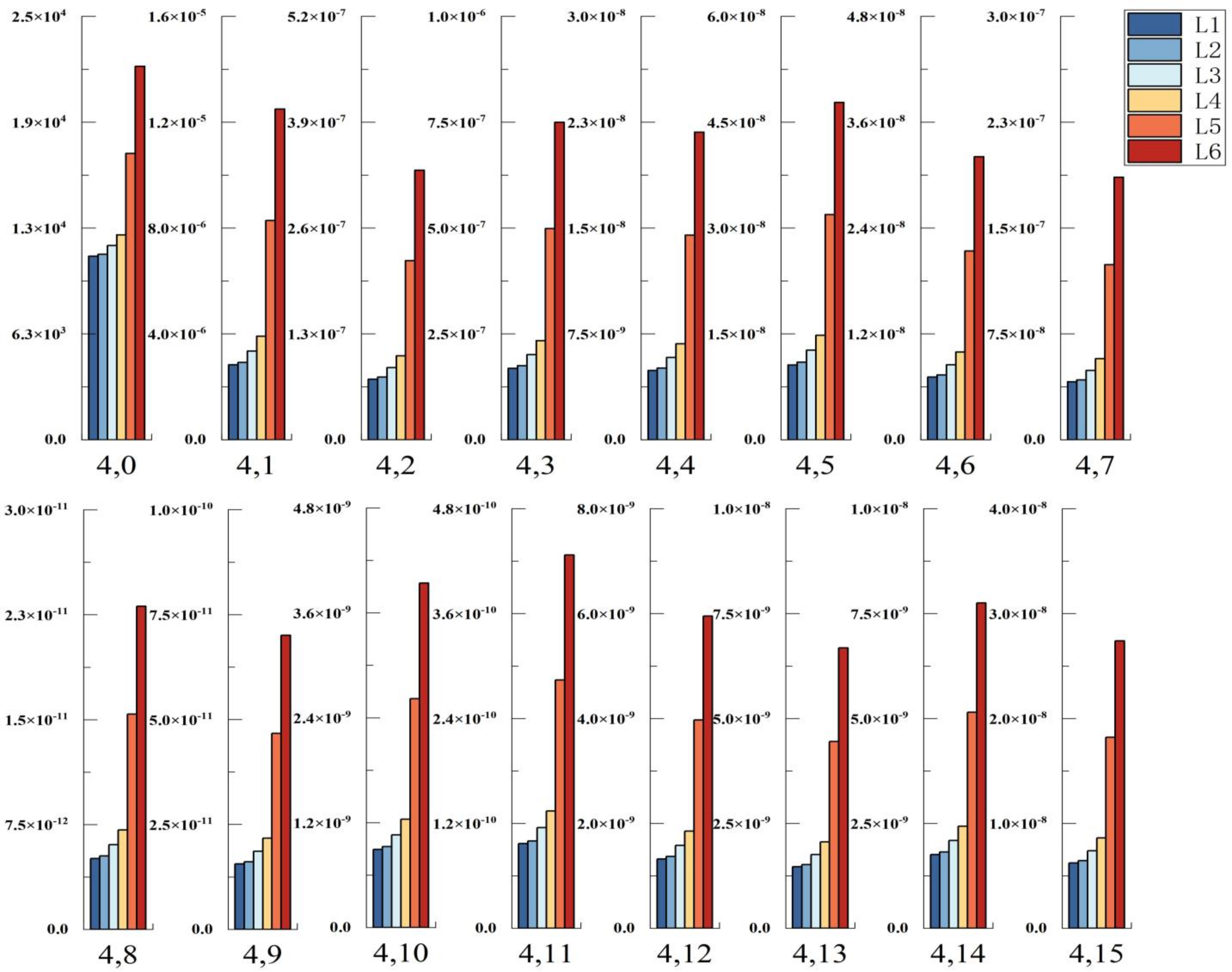
3.4. Leakage Fault Characteristics
3.5. Leakage Fault Diagnosis Results and Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Czermański, E.; Oniszczuk-Jastrzabek, A.; Spangenberg, E.F.; Kozłowski, Ł.; Adamowicz, M.; Jankiewicz, J.; Cirella, G.T. Implementation of the Energy Efficiency Existing Ship Index: An important but costly step towards ocean protection. Mar. Policy 2022, 145, 105259. [Google Scholar] [CrossRef]
- Jimenez, V.J.; Kim, H.; Munim, Z.H. A review of ship energy efficiency research and directions towards emission reduction in the maritime industry. J. Clean. Prod. 2022, 366, 132888. [Google Scholar] [CrossRef]
- IMO. Prevention of Air Pollution from Ships (Third IMO GHG Study 2014); Marine Environment Protection Committee (MEPC): London, UK, 25 July 2014. [Google Scholar]
- Joung, T.H.; Kang, S.G.; Lee, J.K.; Ahn, J. The IMO initial strategy for reducing Greenhouse Gas (GHG) emissions, and its follow-up actions towards 2050. J. Int. Marit. Saf. Environ. Aff. Shipp. 2020, 4, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Wang, K.; Guo, X.; Zhao, J.H.; Ma, R.Q.; Huang, L.Z.; Tian, F.; Dong, S.Y.; Zhang, P.; Liu, C.L.; Wang, Z. An integrated collaborative decision-making method for optimizing energy consumption of sail-assisted ships towards low-carbon shipping. Ocean. Eng. 2022, 266, 112810. [Google Scholar] [CrossRef]
- Yuan, Y.; Wang, J.; Yan, X.; Shen, B.; Long, T. A review of multi-energy hybrid power system for ships. Renew. Sustain. Energy Rev. 2020, 132, 110081. [Google Scholar] [CrossRef]
- Wang, K.; Xue, Y.; Xu, H.; Huang, L.; Ma, R.; Zhang, P.; Jiang, X.; Yuan, Y.; Negenborn, R.R.; Sun, P. Joint energy consumption optimization method for wing-diesel engine-powered hybrid ships towards a more energy-efficient shipping. Energy 2022, 245, 123155. [Google Scholar] [CrossRef]
- Gan, M.; Hou, H.; Wu, X.; Liu, B.; Yang, Y.; Xie, C. Machine learning algorithm selection for real-time energy management of hybrid energy ship. Energy Rep. 2022, 8, 1096–1102. [Google Scholar] [CrossRef]
- Tillig, F.; Ringsberg, J.W. Design, operation and analysis of wind-assisted cargo ships. Ocean. Eng. 2020, 211, 107603. [Google Scholar] [CrossRef]
- Silva, M.F.; Friebe, A.; Malheiro, B.; Guedes, P.; Ferreira, P.; Waller, M. Rigid wing sailboats: A state of the art survey. Ocean. Eng. 2019, 187, 106150. [Google Scholar] [CrossRef]
- Nyanya, M.N.; Vu, H.B.; Schönborn, A.; Ölçer, A.I. Wind and solar assisted ship propulsion optimisation and its application to a bulk carrier. Sustain. Energy Technol. Assess. 2021, 47, 101397. [Google Scholar] [CrossRef]
- He, J.; Hu, Y.; Tang, J.; Xue, S. Research on sail aerodynamics performance and sail-assisted ship stability. J. Wind. Eng. Ind. Aerodyn. 2015, 146, 81–89. [Google Scholar] [CrossRef]
- Talluri, L.; Nalianda, D.K.; Giuliani, E. Techno economic and environmental assessment of Flettner rotors for marine propulsion. Ocean. Eng. 2018, 154, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Schönborn, A. Combination of propulsive thrust and rotational power for ships from a cyclic pitch Darrieus rotor sail. Sustain. Energy Technol. Assess. 2022, 52, 102008. [Google Scholar] [CrossRef]
- Kim, J.; Park, C. Wind power generation with a parawing on ships, a proposal. Energy 2010, 35, 1425–1432. [Google Scholar] [CrossRef]
- Ma, Y.; Bi, H.; Hu, M.; Zheng, Y.; Gan, L. Hard sail optimization and energy efficiency enhancement for sail-assisted vessel. Ocean. Eng. 2019, 173, 687–699. [Google Scholar] [CrossRef]
- Yu, H.; Li, H.; Li, Y. Vibration signal fusion using improved empirical wavelet transform and variance contribution rate for weak fault detection of hydraulic pumps. ISA Trans. 2020, 107, 385–401. [Google Scholar] [CrossRef]
- Ji, X.; Ren, Y.; Tang, H.; Shi, C.; Xiang, J. An intelligent fault diagnosis approach based on Dempster-Shafer theory for hydraulic valves. Measurement 2020, 165, 108129. [Google Scholar]
- Nie, S.; Guo, M.; Yin, F.; Ji, H.; Ma, Z.; Hu, Z.; Zhou, X. Research on fluid-structure interaction for piston/cylinder tribopair of seawater hydraulic axial piston pump in deep-sea environment. Ocean. Eng. 2021, 219, 108222. [Google Scholar] [CrossRef]
- Zhao, X.; Zhang, S.; Zhou, C.; Hu, Z.; Li, R.; Jiang, J. Experimental study of hydraulic cylinder leakage and fault feature extraction based on wavelet packet analysis. Comput. Fluids 2015, 106, 33–40. [Google Scholar] [CrossRef]
- Kumar, N.; Kumar, R.; Sarkar, B.K.; Maity, S. Condition monitoring of hydraulic transmission system with variable displacement axial piston pump and fixed displacement motor. Mater. Today Proc. 2021, 46, 9758–9765. [Google Scholar] [CrossRef]
- Shi, J.; Yi, J.; Ren, Y.; Li, Y.; Zhong, Q.; Tang, H.; Chen, L. Fault diagnosis in a hydraulic directional valve using a two-stage multi-sensor information fusion. Measurement 2021, 179, 109460. [Google Scholar] [CrossRef]
- Qiu, Z.; Min, R.; Wang, D.; Fan, S. Energy features fusion based hydraulic cylinder seal wear and internal leakage fault diagnosis method. Measurement 2022, 195, 111042. [Google Scholar] [CrossRef]
- Lei, Y.; Yang, B.; Jiang, X.; Jia, F.; Li, N.; Nandi, A.K. Applications of machine learning to machine fault diagnosis: A review and roadmap. Mech. Syst. Signal Process. 2020, 138, 106587. [Google Scholar] [CrossRef]
- Panda, A.K.; Rapur, J.S.; Tiwari, R. Prediction of flow blockages and impending cavitation in centrifugal pumps using Support Vector Machine (SVM) algorithms based on vibration measurements. Measurement 2018, 130, 44–56. [Google Scholar] [CrossRef]
- Jegadeeshwaran, R.; Sugumaran, V. Fault diagnosis of automobile hydraulic brake system using statistical features and support vector machines. Mech. Syst. Signal Process. 2015, 52–53, 436–446. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, J.; Zhong, M.; Zheng, J.; Yao, L. A GOA-MSVM based strategy to achieve high fault identification accuracy for rotating machinery under different load conditions. Measurement 2020, 163, 108067. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, M.; Xiang, Z.; Mo, J. Research on diagnosis algorithm of mechanical equipment brake friction fault based on MCNN-SVM. Measurement 2021, 186, 110065. [Google Scholar] [CrossRef]
- Tang, S.; Zhu, Y.; Yuan, S. An adaptive deep learning model towards fault diagnosis of hydraulic piston pump using pressure signal. Eng. Fail. Anal. 2022, 138, 106300. [Google Scholar] [CrossRef]
- Zhu, Y.; Li, G.; Wang, R.; Tang, S.; Su, H.; Cao, K. Intelligent fault diagnosis of hydraulic piston pump combining improved LeNet-5 and PSO hyperparameter optimization. Appl. Acoust. 2021, 183, 108336. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, X.; Xing, S.; Sun, C.; Chen, X. Sparse representation theory for support vector machine kernel function selection and its application in high-speed bearing fault diagnosis. ISA Trans. 2021, 118, 207–218. [Google Scholar] [CrossRef]
- Lan, Y.; Hu, J.; Huang, J.; Niu, L.; Zeng, X.; Xiong, X.; Wu, B. Fault diagnosis on slipper abrasion of axial piston pump based on Extreme Learning Machine. Measurement 2018, 124, 378–385. [Google Scholar] [CrossRef]
- Rajeswari, C.; Sathiyabhama, B.; Devendiran, S.; Manivannan, K. Bearing Fault Diagnosis using Wavelet Packet Transform Hybrid PSO and Support Vector Machine. Procedia Eng. 2014, 97, 1772–1783. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Cao, H.; Chen, X.; He, Z.; Shen, Z. Multi-fault classification based on wavelet SVM with PSO algorithm to analyze vibration signals from rolling element bearings. Neurocomputing 2013, 99, 399–410. [Google Scholar] [CrossRef]
- Wei, H.; Zhang, Q.; Shang, M.; Gu, Y. Extreme learning Machine-based classifier for fault diagnosis of rotating Machinery using a residual network and continuous wavelet transform. Measurement 2021, 183, 109864. [Google Scholar] [CrossRef]
- Li, N.; Zhou, R.; Hu, Q.; Liu, X. Mechanical fault diagnosis based on redundant second generation wavelet packet transform, neighborhood rough set and support vector machine. Mech. Syst. Signal Process. 2012, 28, 608–621. [Google Scholar] [CrossRef]
- Qu, J.; Zhang, Z.; Gong, T. A novel intelligent method for mechanical fault diagnosis based on dual-tree complex wavelet packet transform and multiple classifier fusion. Neurocomputing 2016, 171, 837–853. [Google Scholar] [CrossRef]
- Liu, J.; Li, Y.F.; Zio, E. A SVM framework for fault detection of the braking system in a high speed train. Mech. Syst. Signal Process. 2017, 87, 401–409. [Google Scholar] [CrossRef]
- Mei, F.; Liu, N.; Miao, H.; Pan, Y.; Sha, H.; Zheng, J. On-line fault diagnosis model for locomotive traction inverter based on wavelet transform and support vector machine. Microelectron. Reliab. 2018, 88–90, 1274–1280. [Google Scholar]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Parameter |
|---|---|
| Height | 39.68 m |
| Width | 14.80 m |
| Wing height | 35.60 m |
| Mast height | 37.40 m |
| Base height | 2.268 m |
| Section | 3 |
| Numbers of the wing | 4 |
| Equipment | Pictures | Parameter | Value |
|---|---|---|---|
| Hydraulic pump |  | Rated speed Displacement Volumetric efficiency Mechanical efficiency | 1780 r/min 100 cc/rev 98% 98% |
| Cartridge valve |  | Diameter of poppet Diameter of hole Opening for maximum area | 40 mm 30 mm 5 mm |
| Electro-hydraulic reversing valve |  | Piston diameter Rod diameter Spring rate | 40 mm 20 mm 20 N/mm |
| Balance valve group |  | Characteristic flow rate at maximum opening | 120 L/min |
| Safety globe valve group |  | Relief valve cracking pressure Diameter of poppet Diameter of hole | 25 MPa 40 mm 30 mm |
| Hydraulic cylinder |  | Piston diameter Rod diameter Length of stroke Total mass being moved | 320 mm 280 mm 10.705 m 170,000 kg |
| Item | Actual | Simulation |
|---|---|---|
| Lifting time | 608 s | 600 s |
| Lowering time | 602 s | 600 s |
| Piston side pressure before lifting | 16.6 MPa | 16.9 MPa |
| Piston rod side pressure before lifting | 1.7 MPa | 1.6 MPa |
| Piston side pressure when lifting | 11.3–11.5 MPa | 11.2–11.5 MPa |
| Piston rod side pressure when lifting | 0.2–0.4 MPa | 0.2–0.5 MPa |
| Piston side pressure before lowering | 24.1 MPa | 24 MPa |
| Piston rod side pressure before lowering | 2.5 MPa | 2.5 MPa |
| Piston side pressure when lowering | 13.8–14.3 MPa | 14.3 MPa |
| Piston rod side pressure when lowering | 3.9–4.1 MPa | 4.1 MPa |
| Leakage Clearance (mm) | 0.0001 | 0.001 | 0.005 | 0.01 | 0.05 | 0.2 |
| Label | H1 | H2 | H3 | H4 | H5 | H6 |
| Leakage Clearance (mm) | 0.045 | 0.208 | 0.378 | 0.476 | 0.814 | 1.025 |
| Label | L1 | L2 | L3 | L4 | L5 | L6 |
| Decomposition Object | Feature Name | Label |
|---|---|---|
| Four-layer decomposition of db6 wavelet packet for piston side pressure data | Wavelet packet energy quantization value | a |
| Wavelet packet entropy | b | |
| Wavelet packet energy variance | c | |
| Four-layer decomposition of db6 wavelet packet for piston rod lateral pressure data | Wavelet packet energy quantization value | d |
| Wavelet packet entropy | e | |
| Wavelet packet energy variance | f |
| Label | Leakage Clearance (mm) | a (×104) | b (×10−9) | c (×105) | d (×104) | e (×10−9) | f (×104) |
|---|---|---|---|---|---|---|---|
| H1 | 0.0001 | 4.7539 | 7.0638 | 5.5177 | 1.0908 | 6.7347 | 2.9047 |
| H2 | 0.001 | 4.7540 | 7.0634 | 5.5179 | 1.0911 | 6.7351 | 2.9064 |
| H3 | 0.005 | 4.7541 | 7.0634 | 5.5180 | 1.0911 | 6.7353 | 2.9065 |
| H4 | 0.01 | 4.7542 | 7.0630 | 5.5181 | 1.0911 | 6.7304 | 2.9066 |
| H5 | 0.05 | 4.7370 | 7.0610 | 5.4785 | 1.0733 | 6.9191 | 2.8224 |
| H6 | 0.20 | 3.2919 | 16.7814 | 2.6457 | 0.9963 | 9.3802 | 2.4944 |
| Label | Leakage Speed (L/min) | a (×104) | b (×10−9) | c (×105) | d (×104) | e (×10−9) | f (×104) |
|---|---|---|---|---|---|---|---|
| L1 | 0 | 4.7540 | 7.0638 | 5.5177 | 1.0908 | 6.7331 | 2.9047 |
| L2 | 0.1 | 4.7505 | 7.0493 | 5.5095 | 1.1104 | 6.9776 | 3.0107 |
| L3 | 0.6 | 4.7419 | 7.0179 | 5.4897 | 1.1554 | 7.5476 | 3.2590 |
| L4 | 1.2 | 4.7301 | 6.9744 | 5.4624 | 1.2194 | 8.2850 | 3.6300 |
| L5 | 6 | 4.6493 | 6.7205 | 5.2774 | 1.7046 | 12.3314 | 7.0941 |
| L6 | 12 | 4.5781 | 6.5838 | 5.1170 | 2.2227 | 14.2546 | 12.0611 |
| Leakage Degree | Radial Clearance of Reversing Valve (mm) | Sign | Hydraulic Cylinder Leakage (L/min) | Sign |
|---|---|---|---|---|
| Normal | <0.02 | A | <0.5 | A |
| Slight leakage | 0.02~0.05 | B1 | 0.5~1 | C1 |
| Medium leakage | 0.05~0.1 | B2 | 1~5 | C2 |
| Severe leakage | >0.1 | B3 | >5 | C3 |
| Number | Leakage Clearance (mm) | a (×104) | b (×10−9) | c (×105) | d (×104) | e (×10−9) | f (×104) |
|---|---|---|---|---|---|---|---|
| 1 | 0.002 | 4.7540 | 7.0638 | 5.5187 | 1.0907 | 6.7331 | 2.9047 |
| 2 | 0.004 | 4.7541 | 7.0633 | 5.5180 | 1.0910 | 6.7309 | 2.9063 |
| 3 | 0.006 | 4.7541 | 7.0634 | 5.5180 | 1.0911 | 6.7315 | 2.9066 |
| 4 | 0.008 | 4.7540 | 7.0639 | 5.5186 | 1.0900 | 6.7336 | 2.9043 |
| 5 | 0.01 | 4.7542 | 7.0630 | 5.5181 | 1.0911 | 6.7304 | 2.9066 |
| … | … | … | … | … | … | … | … |
| 39 | 0.18 | 3.5436 | 13.3003 | 3.4618 | 1.0034 | 9.1823 | 2.5103 |
| 40 | 0.20 | 3.2919 | 16.7814 | 2.6457 | 0.9963 | 9.3802 | 2.4944 |
| Number | Leakage Speed (L/min) | a (×104) | b (×10−9) | c (×105) | d (×104) | e (×10−9) | f (×104) |
|---|---|---|---|---|---|---|---|
| 41 | 0 | 4.7540 | 7.0638 | 5.5177 | 1.0908 | 6.7331 | 2.9047 |
| 42 | 0.05 | 4.7517 | 7.0540 | 5.5123 | 1.1040 | 6.8963 | 2.9756 |
| 43 | 0.10 | 4.7505 | 7.0493 | 5.5095 | 1.1104 | 6.9776 | 3.0107 |
| 44 | 0.15 | 4.7492 | 7.0449 | 5.5065 | 1.1168 | 7.0594 | 3.0455 |
| 45 | 0.20 | 4.7480 | 7.0402 | 5.5038 | 1.1233 | 7.1401 | 3.0807 |
| … | … | … | … | … | … | … | … |
| 79 | 9.5 | 4.5953 | 6.6073 | 5.1554 | 2.0884 | 13.8831 | 10.6487 |
| 80 | 10 | 4.5927 | 6.6033 | 5.1496 | 2.1081 | 13.9307 | 10.8501 |
| Leakage Mode | Status Label | Quantity |
|---|---|---|
| Normal conditions | A | 30 |
| Slight leakage of reversing valve | B1 | 15 |
| Moderate leakage of reversing valve | B2 | 15 |
| Serious leakage of reversing valve | B3 | 15 |
| Slight leakage of hydraulic cylinder | C1 | 15 |
| Moderate leakage of hydraulic cylinder | C2 | 15 |
| Serious leakage of hydraulic cylinder | C3 | 15 |
| Modes | A | B1 | B2 | B3 | C1 | C2 | C3 | (Average) |
|---|---|---|---|---|---|---|---|---|
| Accuracy | 100% | 100% | 93.3% | 93.3% | 93.3% | 100% | 100% | 97.5% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, R.; Zhao, H.; Wang, K.; Zhang, R.; Hua, Y.; Jiang, B.; Tian, F.; Ruan, Z.; Wang, H.; Huang, L. Leakage Fault Diagnosis of Lifting and Lowering Hydraulic System of Wing-Assisted Ships Based on WPT-SVM. J. Mar. Sci. Eng. 2023, 11, 27. https://doi.org/10.3390/jmse11010027
Ma R, Zhao H, Wang K, Zhang R, Hua Y, Jiang B, Tian F, Ruan Z, Wang H, Huang L. Leakage Fault Diagnosis of Lifting and Lowering Hydraulic System of Wing-Assisted Ships Based on WPT-SVM. Journal of Marine Science and Engineering. 2023; 11(1):27. https://doi.org/10.3390/jmse11010027
Chicago/Turabian StyleMa, Ranqi, Haoyang Zhao, Kai Wang, Rui Zhang, Yu Hua, Baoshen Jiang, Feng Tian, Zhang Ruan, Hao Wang, and Lianzhong Huang. 2023. "Leakage Fault Diagnosis of Lifting and Lowering Hydraulic System of Wing-Assisted Ships Based on WPT-SVM" Journal of Marine Science and Engineering 11, no. 1: 27. https://doi.org/10.3390/jmse11010027
APA StyleMa, R., Zhao, H., Wang, K., Zhang, R., Hua, Y., Jiang, B., Tian, F., Ruan, Z., Wang, H., & Huang, L. (2023). Leakage Fault Diagnosis of Lifting and Lowering Hydraulic System of Wing-Assisted Ships Based on WPT-SVM. Journal of Marine Science and Engineering, 11(1), 27. https://doi.org/10.3390/jmse11010027