1. Introduction
Wind power is considered to be among the most promising renewable energy sources and has attracted widespread world interest in recent years, due to the sustainability, cost-effectiveness, and low environmental impact of wind generators [
1]. Production of offshore wind energy is becoming more appealing as the need for renewable energy grows, with benefits such as higher wind speeds, fewer noise constraints, and fewer visual impacts in marine environments [
2]. The two most common forms of offshore wind turbines are bottom-fixed and floating wind turbines. Monopile, gravity-based, and suction bucket structures are the most popular nearshore bottom-fixed wind-based turbines, whereas the best-known floating offshore wind turbine platforms are the spar, tension leg, and barge types [
3,
4]. Offshore floating wind turbine systems are still in the early stages of development, and they are being tested in the laboratory or real-world scenarios utilizing proof-of-concept tests.
Environmental stress leads to severe vibration effects on offshore platforms, causing deck platform failure, structural failure, operational failure, and even injury to workers. Currently, two methodologies are generally used to reduce structural loads and extend the life of offshore wind turbines [
5,
6,
7,
8]. The first method uses blade pitch control to minimize the thrust force of the rotor, while the second technique involves vibration suppression devices which have three modes: passive, semi-active, and active. Passive control methods are characterized by using constant parameters and the absence of the need for external energy. A tuned mass damper (TMD) is an example of a passive technique, which is used to absorb vibrational energy by setting one of the natural frequencies of a vibrated system. The passive TMD control technique is the main foundation of the research on OFWT stabilization [
9,
10]. In comparison with passive strategies, the semi-active control method offers higher performance since it can be adapted over time owing to the additional sensors and control algorithms. Prior authors [
11,
12] have proved that the semi-active varying-damper-and-spring system is determined to be the most successful overall, managing vibrations just as efficiently with half the mass of a passive TMD. The combination of mass and an actuator is called an active mass damping (AMD) system. A few studies have applied the AMD control strategy to OFWTs [
13,
14].
The underactuated mechanical system (UMS), with its improved system adaptability, efficiency improvements, and cost-saving, has long been a fascinating topic for researchers [
15,
16,
17,
18,
19]. The underactuated TORA is an AMD control approach, in which the oscillating cart as a transnational un-actuated part is connected with the actuator known as the rotational eccentric proof mass [
20]. For TORA stabilization, numerous control techniques have been devised [
21,
22]. Furthermore, when dealing with any practicable stabilizing issues, such as OFWTs, there is often a discrepancy between the dynamical model and the real plant used for controller design. Parasitic/unmodeled dynamics, plant uncertainties, and external unknown disturbances result from these inconsistencies. Designing a closed-loop control law is a difficult task, especially in the presence of disturbances and perturbations [
23,
24]. To deal with these problems, robust control algorithms are considered the best solutions [
25]. Sliding mode control (SMC) is a renowned robust nonlinear control strategy in academia and industry for dealing with large and abrupt changes in system dynamics [
26,
27,
28]. Chattering that appears on the input of control law is one of SMC’s drawbacks. The integral sliding mode control (ISMC) ensures a free-reaching phase surface so that the total system behavior accomplishes the desired invariance. It has high robustness properties against external disturbances, and it can overcome system uncertainty, particularly in nonlinear systems [
29]. Backstepping is another nonlinear control strategy that is used to split a high-order nonlinear system into subsystems lower than the original system order. It provides virtual control input and “steps back” all the system until the entire control law design is accomplished [
30]. For perturbed nonlinear systems, integrating the backstepping design and ISMC is an alternate robust control strategy. Other authors [
31,
32] have provided adequate knowledge of adaptive control laws in their research works. The inaccessibility of the actual OFWT system states is also an issue. Researchers [
33,
34,
35] have proposed control strategies by using HGO for estimating the system’s states and stable zero dynamics minimum-phase nonlinear systems respectively. Therefore, inspired by all the above-mentioned robust control techniques, this article aims to design a hybrid control algorithm that can provide all system state estimations and can mitigate disturbances/uncertainties at the same time.
The barge-type TORA-based multiple dynamics of the OFWT model, which we recently published [
14], is used as an active structure control strategy in this article, where control input is provided to the proof-mass actuator for controlling the rotor’s position. This successfully stabilized the OFWT’s vibration movement. Limiting the platform pitch and the tower bending angle of the outputs of the OFWT is also a significant problem, which will be solved in this article. A barrier Lyapunov function (BLF) is a possible solution, which can handle the output constraints of platform pitch and tower bending angle. Therefore, this article presents a novel control framework for OFWT stabilization under output constraint by applying a high-gain observer (HGO)-based adaptive backstepping integral sliding mode control based on the barrier Lyapunov function. Furthermore, the proposed control law based on the BLF has been compared with adaptive backstepping ISMC to show the efficiency of the new output constraint control scheme. Through MATLAB/SIMULINK simulations, the effectiveness of the proposed control scheme has been examined. The results confirm the validity and efficiency of the proposed control approaches.
The following sections are included in the rest of the paper:
Section 2 presents the dynamical model of a barge-type TORA-based OFWT. The methodology of the new adaptive robust control law is presented in
Section 3. The high-gain observer with stability analysis is formulated in
Section 4 for the TORA-based proposed OFWT. The MATLAB/SIMULINK results, as well as the research work conclusions, are presented sequentially in
Section 5 and
Section 6.
2. Dynamical Model of Barge-Type TORA-Based OFWT
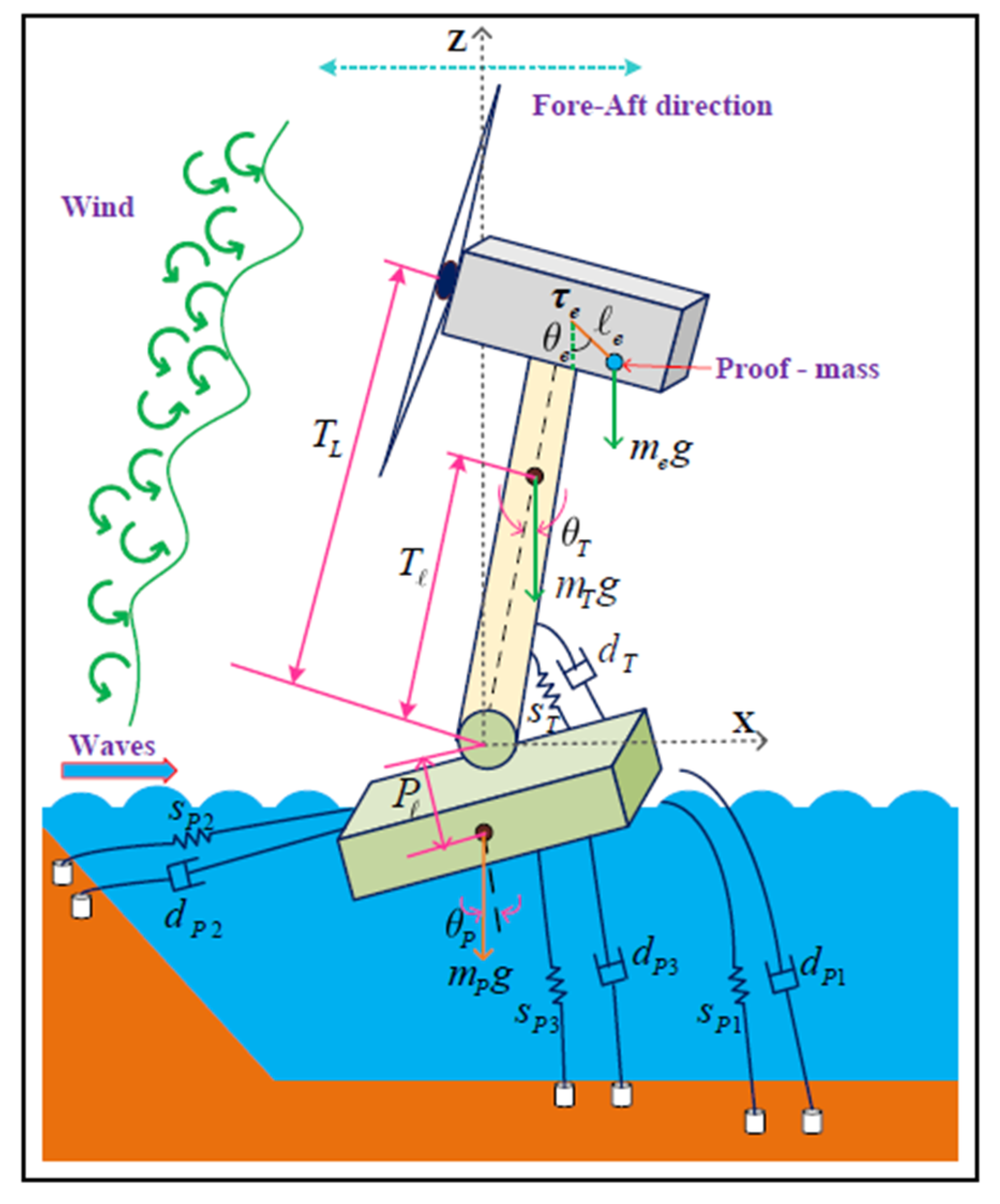
The barge-type TORA-based five degrees of freedom (5DOF) OFWT model has been taken from our recent research article [
14], as shown in
Figure 1. It is capable of generating five megawatts. Towards the direction of the negative z-axis, the rotating proof mass (18 m
6 m
6 m) has been attached outside of the nacelle. The hub height of the tower is 90 m. The dimension of the barge-type platform attached with mooring lines is (40 m
40 m
10 m). The overall OFWT vibratory motion has been considered a linear movement component of the TORA, whereas the proof mass circular motion represents the TORA controllable actuated component. In this way, the five degrees of freedom OFWT model has become an underactuated mechanical system. The designed dynamic system consists of proof-mass rotational movement, tower fore–aft bending, platform pitch motion, and two linear surge and heave displacements. In this research work, the generator’s dynamic behavior, degrees of freedom, rotor, and gearbox will not be used according to the designed model [
13]. For the fore–aft and pitch motion of the tower and the platform, respectively, the approximated small-angle is used despite the most severe wave and wind cases, so that the equilibrium position not does exceed 10 degrees [
5]. It is considered that the proof-mass actuator in the proposed OFWT is unable to cross 90 degrees out of its state of equilibrium due to the small-angle approximation.
Figure 1 presents a pivoting linear rigid beam with the same point of origin XYZ reference frame, where the pivot point connects the platform with the tower. The size from the middle of the platform to the middle of the mutual pivot point is denoted by
, and, respectively, the mass of the barge-type platform and its moment of inertia are denoted by
and
. The platform and tower’s attached dampers coefficient,
, and the tightness of springs,
, have constant values. Likewise,
and
, respectively, represent the mass of the tower and its moment of inertia.
stands for the distance between the nacelle’s mid-point and the mutual pivot point, and
stands for the distance between the center of mass of the tower and the mutual pivot point. Gravity is denoted with
, and
is the mass composed of the rotary proof mass
with the attached rod mass
. The rotating proof mass has a moment of inertia
, where
stands for the rod size from the applicable control input
to the rotary proof mass. The angles
stand for angular positions and
stand for the angular velocities of the rotary proof mass, tower, and platform. The translational positions
and respective velocities are represented by
After thoroughly examining and grasping the working theory of the TORA active mass damper control approach and using the OFWT system, the mathematical model of the TORA floating wind turbine has been obtained using the Euler–Lagrange equation of motion [
14]. The following are some necessary equations taken from the derived model [
14]. The overall kinetic energy of the considered model is determined by finding the platform kinetic energy
, tower kinetic energy
, and rotary proof-mass kinetic energy
, as follows:
In the same way, the overall potential energy of the considered model is determined by finding the platform potential energy
tower potential energy
and rotary proof-mass potential energy
as follows:
The Lagrangian of the system is determined by the difference between
and
as follows:
By using the Euler–Lagrange equations of motion, the respective dynamics of the barge-type TORA-based five degrees of freedom OFWT model are as follows:
where the platform mass is
= 6,150,000 kg, the tower mass is
= 347,460 kg, the nacelle mass is
= 350,000 kg, the proof mass is
= 84,000 kg and the proof-mass rod mass is
= 42,000 kg. The tower and proof-mass rod length are respectively taken as
= 90 m and
= 6 m. In general,
= −0.28 m, 0,
= 64 m is the center of the mass. Consequently
= 3,528,000 kg
= 182,170,000 kg
and
= 169,450,000 kg
are the inertia of the rotary proof mass, tower, and platform, where
= 9.81
is the gravity constant. The stiffness value of the springs is
= 14,171,000,000 N/m,
= 1,417,100,000 N/m and
= 97,990,000,000 N/m, and
= 2,103,200,000 N
= 3,637,400,000 N
and
= 363,740,000 N
are the values of the dampers coefficient. Due to the small angles of the tower and platform, we have considered the following approximation:
and
. For simplicity, let the system’s states be
hence, the barge-type 5DOF TORA-based OFWT model into a generalized affine form will be as follows:
Equation (5) contains the following data:
where
where the equilibrium points of the 5DOF barge-type OFWT model are as follows:
We supposed that the nacelle’s rotary proof mass could not reach 90° from the equilibrium position due to the small-angle approximation. Therefore, the equilibrium position is in Equation (15). The robust adaptive control laws for the output constraints of the 5DOF barge-type TORA-based OFWT are developed in the following parts.
3. Design of Robust Adaptive ISMC Algorithm
The design of a robust control algorithm for the TORA actuator in a nacelle is required to reduce the overall system’s vibrations effectively. The dynamics of 5DOF barge-type TORA-based OFWT have nonlinearities that are subjected to a variety of perturbations caused by unknown disturbances and parametric uncertainties. We can take the following matched perturbation in a suggested generalized form of Equation (5), as follows:
where
is the matched perturbation and
. To implement the robust control technique [
22], the general affine form of Equation (16) must be divided into second-order nonlinear systems. In this way, we will be able to achieve the following subsystems:
where
are the state variables. A three-step method will be used to implement a robust adaptive control scheme for a rotary actuator of the proof mass. Firstly, by using the backstepping methodology, a backstepped OFWT subsystem model will be achieved. After this, we will design an adaptive chattering suppression gain for robust backstepping integral sliding mode control laws. Finally, we will design a high-gain observer with stability analysis for the suggested model. The backstepping procedure [
30] has been adapted to convert the proposed model (17) to another pattern. For this, a new state variable is selected for the first subsystem of Equation (17) as follows:
Next, we choose the Lyapunov function and take its derivative, as follows:
Select a fictitious control input value
to maintain the stability of
, as in:
where
. Equation (20) is modified by substituting the value of
, giving:
By selecting
, stable
dynamics can be achieved. Equation (21) will be backstepped and the variable changed, such as:
Following the aforementioned method, the chosen state variables of backstepping in a subsystem form of Equation (17) will be:
where
represent the positive constants. The remaining Lyapunov functions are defined as
The rest of the fictitious control inputs have been taken as:
Taking the Equation (24) derivative and further evaluating it, the following results will be achieved:
The second-order backstepping-based subsystems of the presented OFWT system are represented by Equation (25). Furthermore, two different control algorithms are presented for the stabilization of the OFWT model. The first one is called an adaptive integral sliding mode control and the second is the adaptive integral sliding mode control using BLF. The sliding manifold for each subsystem of Equation (25) is used for designing proposed control laws, as follows:
where
and
are the positive constants. The surfaces (26)–(30) sum and respective derivatives sum are as follows:
where
Theorem 1. Consider the backstepping-based proposed model (25) and select the sliding manifold as in Equation (31) for the adaptive ISMC algorithm, as follows:where the adaptive gain is represented by and switching gain is represented by . The proposed control algorithm will effectively stabilize the OFWT, against all the matched unknown bounded perturbations. Proof of Theorem 1. Stability analysis using the Lyapunov function is a very precise method of control design. We took a Lyapunov candidate function, such as:
where
and
are the bounded positive constants. Now, substituting the respective values after taking the derivative of the Lyapunov function (38) to time yields:
Now, substituting the control input
into Equation (39) yields:
where the adaptive gain is designed from
. Let
and fulfils the bounded unknown perturbation constraint as
where
. After applying these parameter values, Equation (40) will be as follows:
where
and further simplifying yields:
The derivative of the Lyapunov function is negative definite, as shown in Equation (42). As a result, the suggested control algorithm stabilizes the system effectively and robustly, completing the verification. □
Theorem 2. Consider the backstepping-based proposed model (25) and select the sliding manifold as in Equation (31) for adaptive ISMC algorithm with output constraint (
and )
, as follows:
where are the positive gains, the adaptive and switching gains are respectively as: .
The proposed control algorithm will effectively stabilize the OFWT to the output constraint, against all the matched unknown bounded perturbations. Proof of Theorem 2. Select a Lyapunov candidate function, as follows:
where
and
. Now, substituting the respective values after taking the derivative of the Lyapunov function (44) to time yields:
where the following parameters are defined as
Let
and fulfill the bounded unknown perturbation constraint as
where
. Now, substituting the control input
in Equation (46) yields:
where the adaptive gain is designed from
. The derivative of the Lyapunov function is negative definite, as shown in Equation (47). As a result, the suggested control algorithm stabilizes the system effectively and robustly, and will never become unbounded due to the conditions mentioned in Theorem 2. It completes the verification. □
4. Formulation of HGO
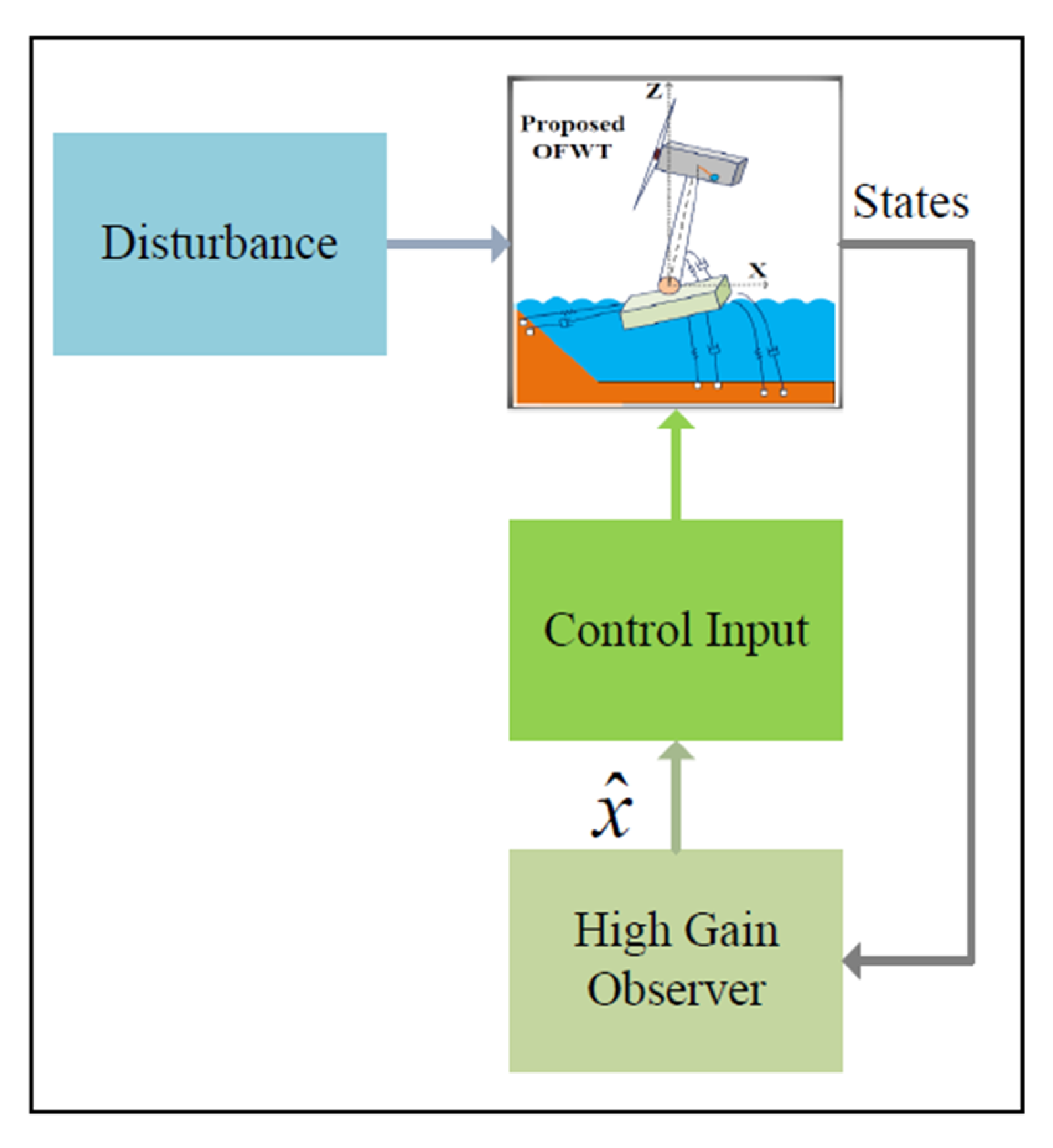
With information on desired output states, the high-gain observer can generate the estimation of the unknown states in the presence of system uncertainties and disturbances. The HGO’s state estimation property ensures that the controller has access to unknown states.
Figure 2 represents the schematic diagram of the adaptive robust control scheme for the OFWT system. The HGO uses the actual system states information and provides all known and unknown estimated states to the control input of the closed-loop system, as shown in the schematic diagram.
In the form of a second order, we have presented five subsystems in this article, where each of them is defined in normal form. After that we developed HGOs for each subsystem for the nominal values of the system, as follows:
where
and
while
has a small positive constant value, such as
. Constant parameters
are chosen from these polynomials
and
in such a way that in the left half-plane, the polynomials’ roots will exist.
Stability Analysis: The stability analysis of the high-gain observer of the suggested barge-type OFWT model is determined by rewriting Equation (16) into a generalized form as follows:
where
is a real-valued map, and
is the image of
. Overall, the proposed OFWT model Equation (16) has a 10-degree order
and each subsystem of the proposed OFWT model Equation (17) has a 2-degree order
. According to the HGO design [
35], the derivative of estimated states can be expressed as follows:
where
here,
is the estimation error of the observer. For simplicity, a notation can be defined as
. Now, taking the derivative of Equation (55) yields:
where
Now, the scale estimation is defined as
where
and
After substituting the values, the scale estimation of each state is as follows:
For simplicity, we assumed that
and similarly for the remaining parameters. From this, we can get
From the scale estimation of each state, a generalized form can be written as follows:
taking the derivative of Equation (57) and substituting the values yields:
hence, Equation (59) can be written as:
since
is Hurwitz, thus it is concluded from Equation (60) that as the value
approaches zero, the uncertain term becomes zero, and the error converges to zero asymptotically. The derived matrices for the stability analysis are presented in
Appendix A.
5. Simulation Results and Discussion
In this paper, MATLAB/SIMULINK software is utilized to simulate the mathematical model of the barge-type TORA-based 5DOF OFWT and as well as to verify the efficiency of the designed BLF-based adaptive backstepping ISMC compared with the adaptive backstepping ISMC law. As in the control design portion, we have selected a backstepping ISMC surface and designed two robust adaptive ISMC laws based on the high-gain observer. The objective of this study is to examine the OFWT model stability under the applied output constraints and to improve its performance in terms of stability by using the suggested control strategy. For this, the parametric values discussed in the suggested perturbed 5DOF OFWT model section have been used in simulation with the assumption that the system is in vibrating condition with these initial values:where the following are the initial design conditions for the HGO: and .
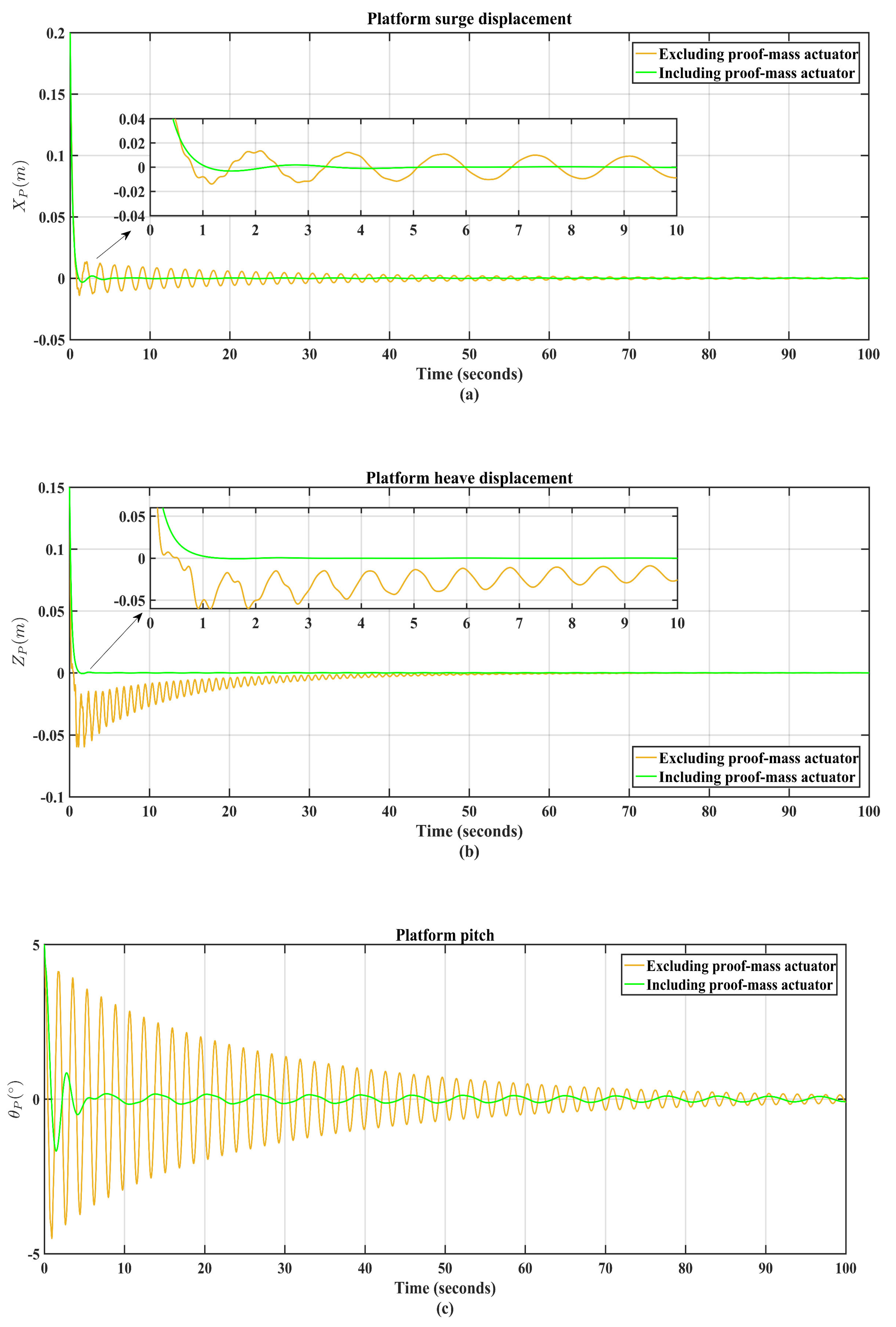
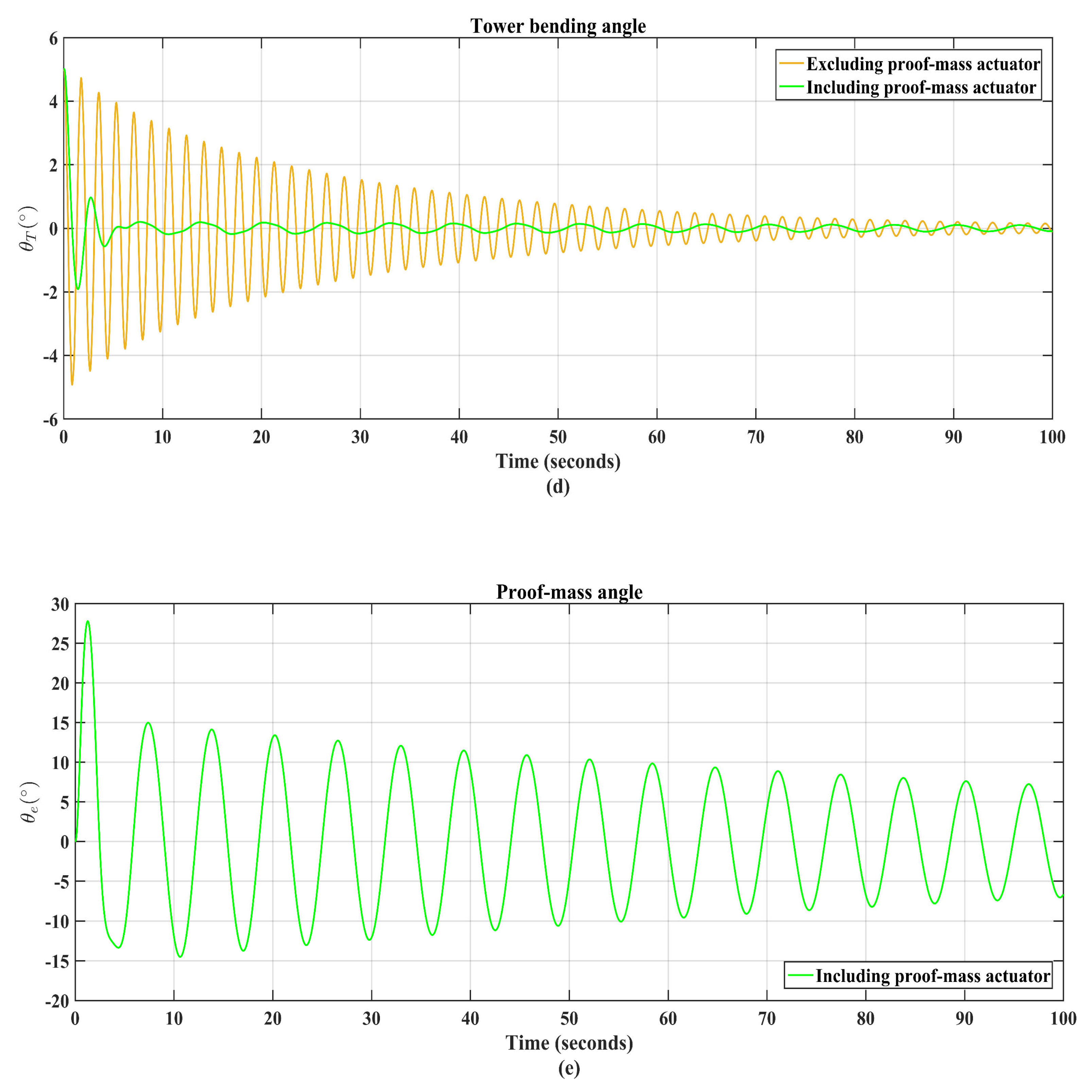
We have been able to achieve the simulation results displayed in
Figure 3 by utilizing the initial values rather than incorporating control input. Throughout every simulation outcome,
of the part (a) and
of the part (b) represent the platform surge and heave linear displacement, while parts (c), (d), and (e) represent the platform pitch angle (
), bending tower angle (
), and rotary angle (
) of the TORA actuator, respectively. Without applying control laws, the suggested model’s natural response, including and excluding the actuated proof mass, has been studied using the system comparison analysis shown in
Figure 3.
Figure 3 shows that while achieving the equilibrium position, the effect of the vibration is smaller in the suggested proof-mass actuator model case, while
Figure 3e shows the actuated proof-mass vibrating behavior. Similarly, without considering the actuated proof-mass case,
Figure 3a,b go to their equilibrium position approximately in 60 s, while in the case of including the proof-mass actuator, and with no applying control input, the states go to the equilibrium position within 5 s. In the remaining subparts of
Figure 3c–e, in both cases (excluding and including the proof-mass actuator model), the states go to their equilibrium position after 100 s, but the difference is in terms of vibrational amplitude. Furthermore, the barge-type OFWT is a fundamentally stable system, as has been demonstrated in the literature [
6,
9]. Our proposed model’s simulated results demonstrate a similar pattern to that shown in previous articles. As the standard matched sinusoidal disturbance,
(
t) is taken in our proposed model as a perturbation factor. The selection of disturbances
(
t) and
(
t) are used in such a way as to cause the drifting phenomena into the barge platform of the proposed model, where
(
t) = 5
sin(2
)
(
t) = 5
sin(2
)
and
is the drifting angle. Moreover,
(
t) = 5
sin(2
),
, and
φ = 30°.
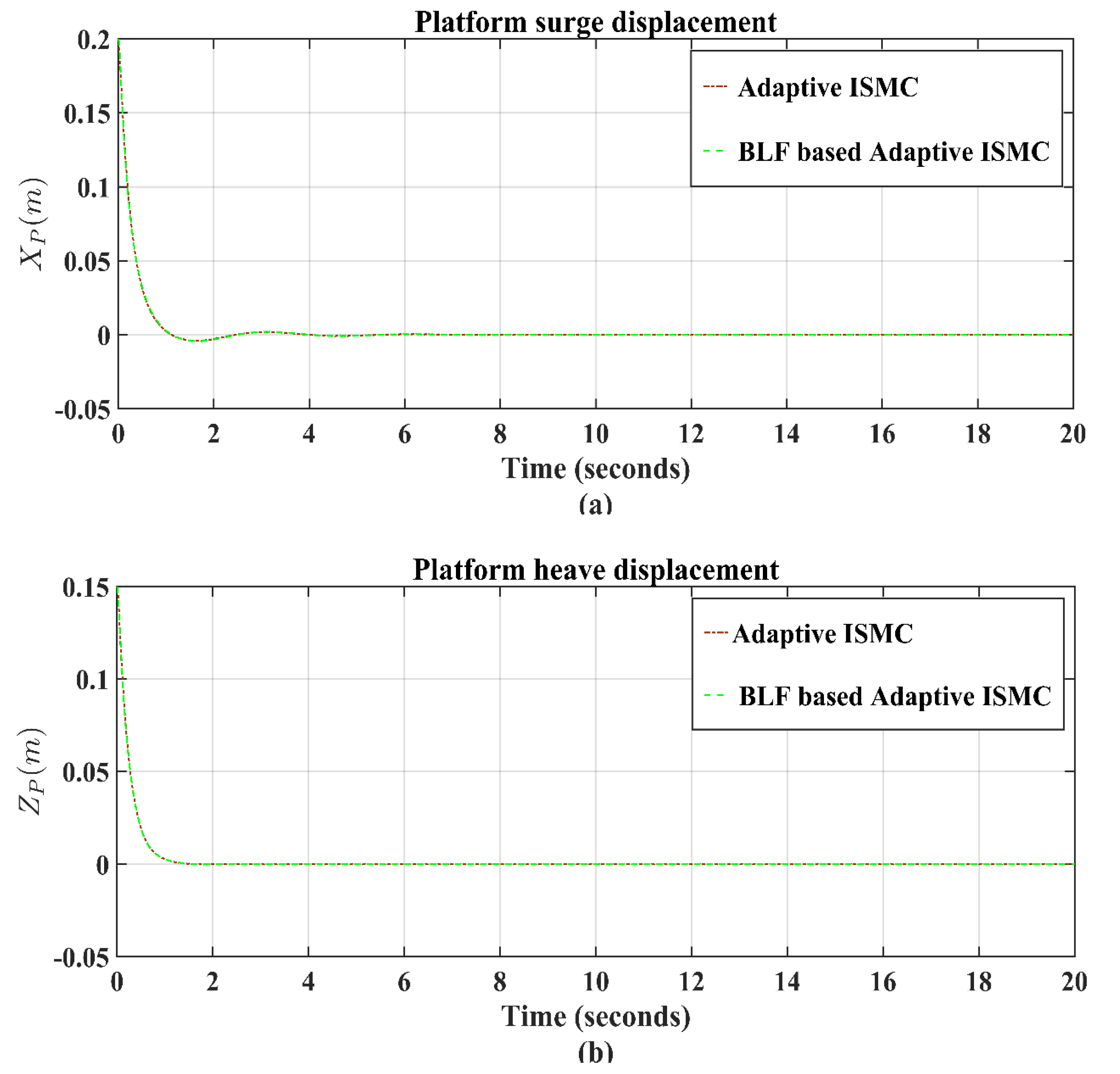
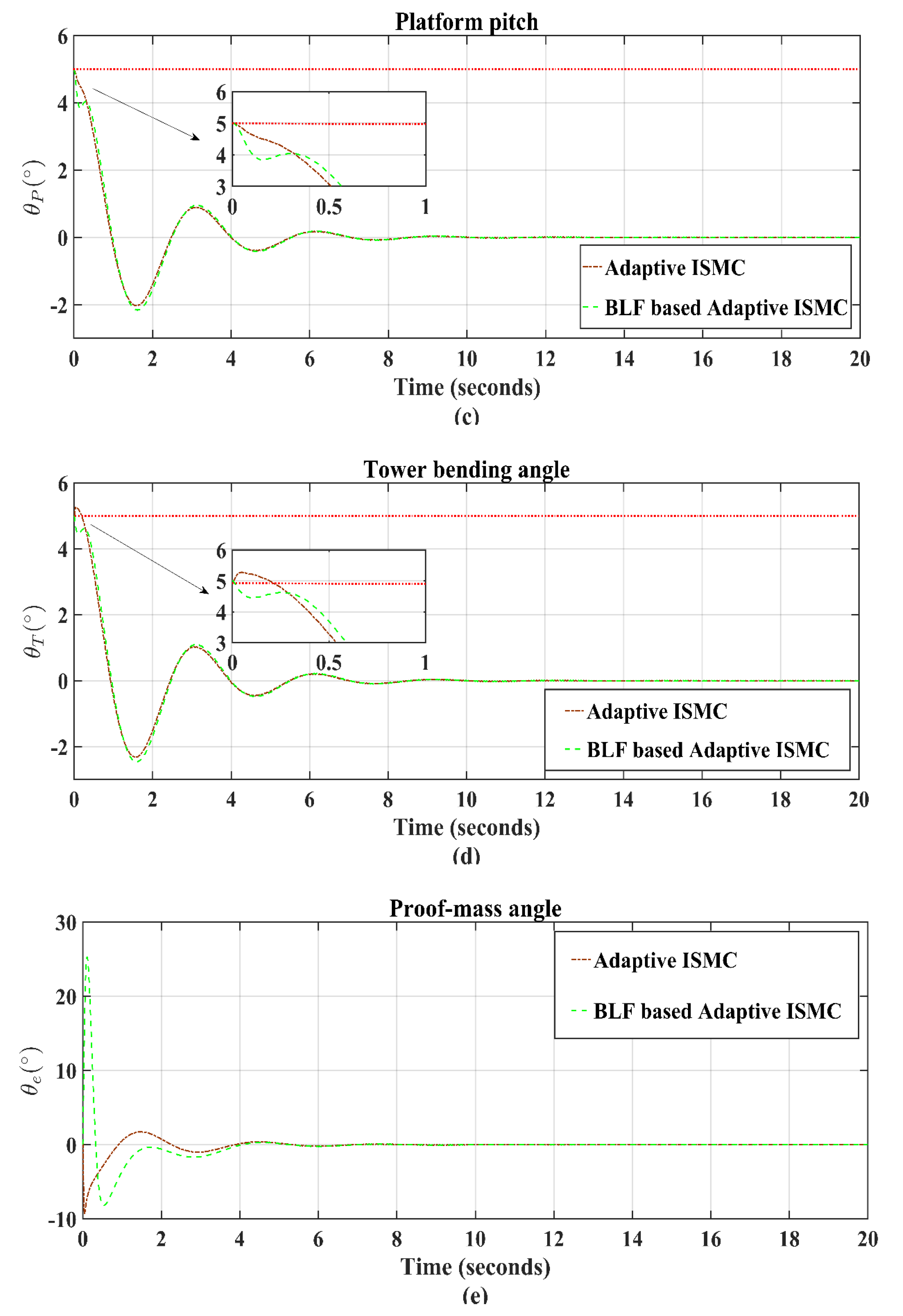
The comparison study has been conducted by applying the proposed adaptive backstepping ISMC and BLF-based adaptive backstepping ISMC to the proof-mass actuator, as shown in
Figure 4.
Table 1 shows the positive constants parameters. For comparison purposes, we have chosen the same values for both tuning control laws. All the parts of
Figure 4 show that the states go to their equilibrium position at the same time (within 10 s) by using the adaptive backstepping ISMC and the BLF-based adaptive backstepping ISMC. Parts (c) and (d) of
Figure 4 show that the BLF-based control algorithm works accurately and bound the platform pitch angle and the tower bending angle within five degrees, while the adaptive backstepping ISMC violates the constraint. Furthermore, the proposed BLF-based adaptive backstepping ISMC better stabilizes the pitch and the bending movement of the barge-type OFWT tower within 10 s as compared with the active and passive control approaches mentioned in other articles [
9,
13].
Table 2 presents the root mean square error (RMSE) of
Figure 4. For quantitative comparison purposes,
Table 2 also presents the transient state and steady-state error response. From
Table 2, it can be seen clearly that the error of controlled states (CS) using the adaptive backstepping ISMC and BLF-based adaptive backstepping ISMC shows a very small error. Overall, the RMSE of the controlled states using the adaptive backstepping ISMC has less error than the BLF-based adaptive backstepping ISMC.
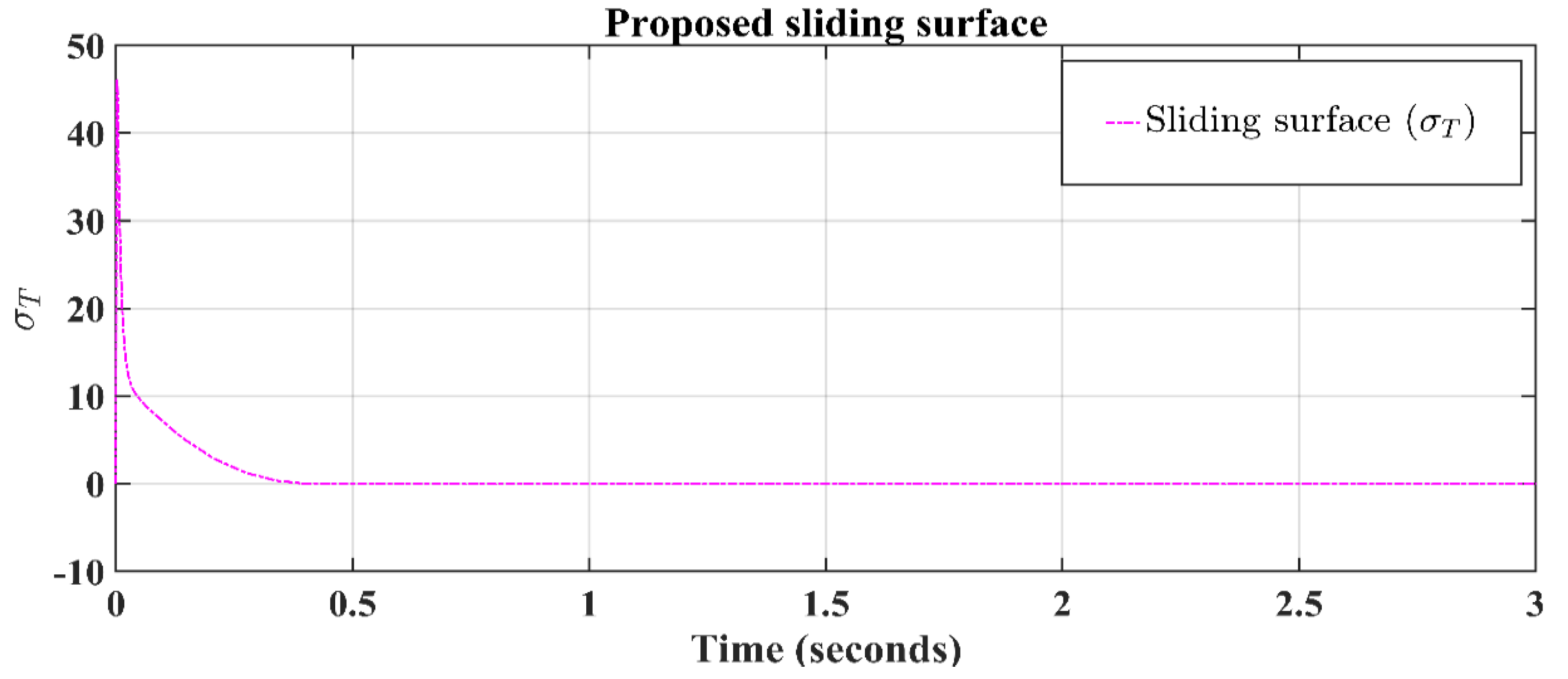
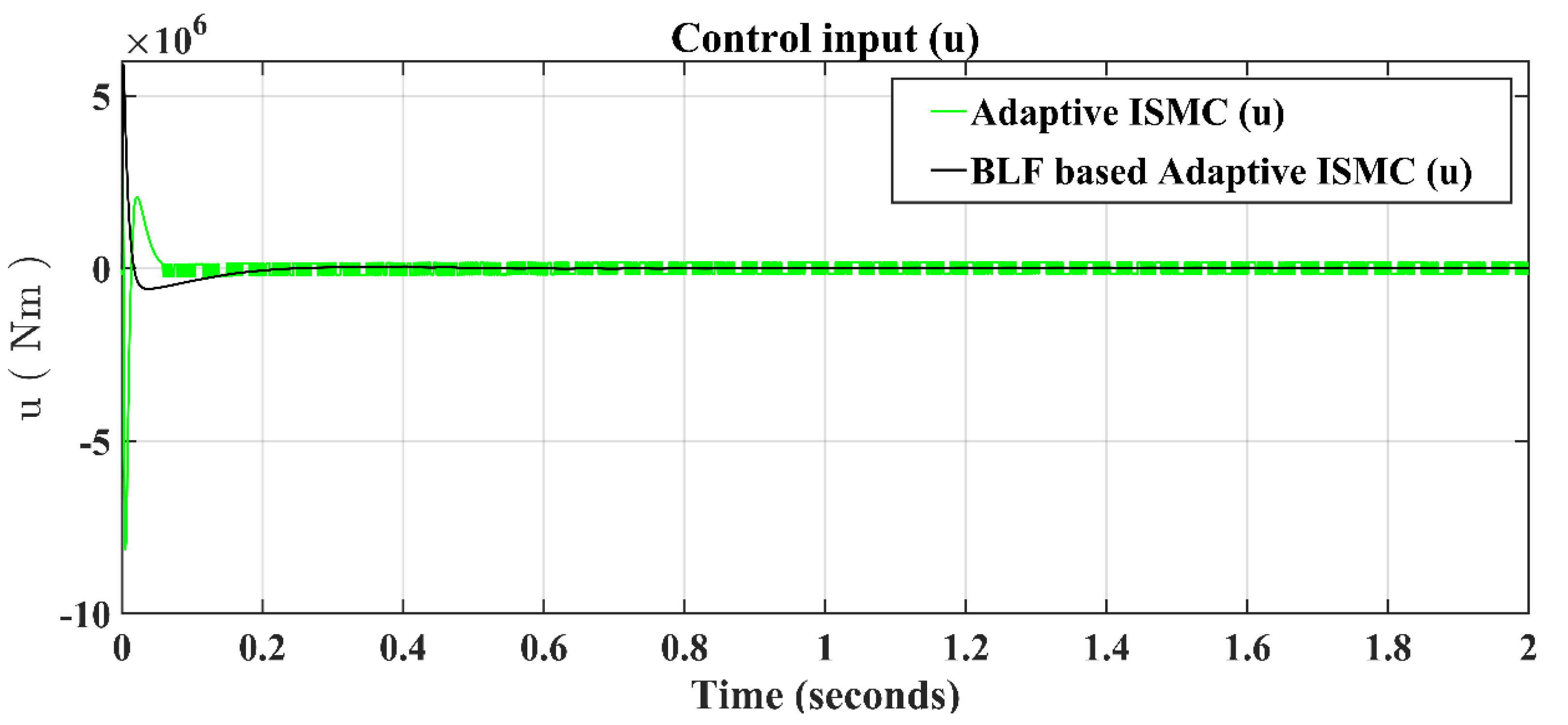
Figure 5 represents the total backstepping ISMC surface response for designing HGO-based proposed control algorithms. It can be observed that the system trajectories reach the sliding manifold in 0.5 s i.e.,
. The BLF-based adaptive backstepping ISMC input represents significantly less chattering than the adaptive backstepping ISMC input, as can be seen clearly in
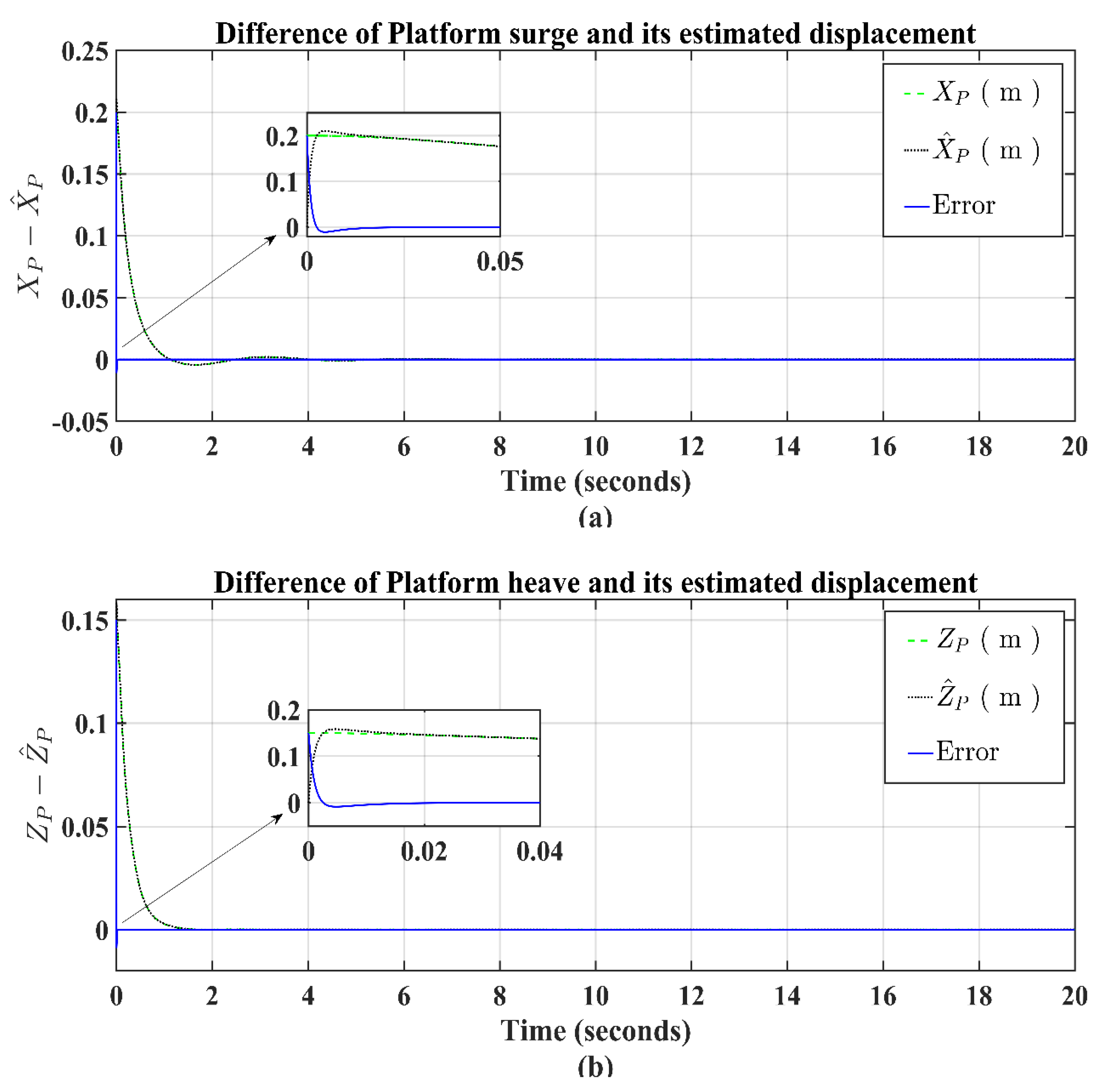
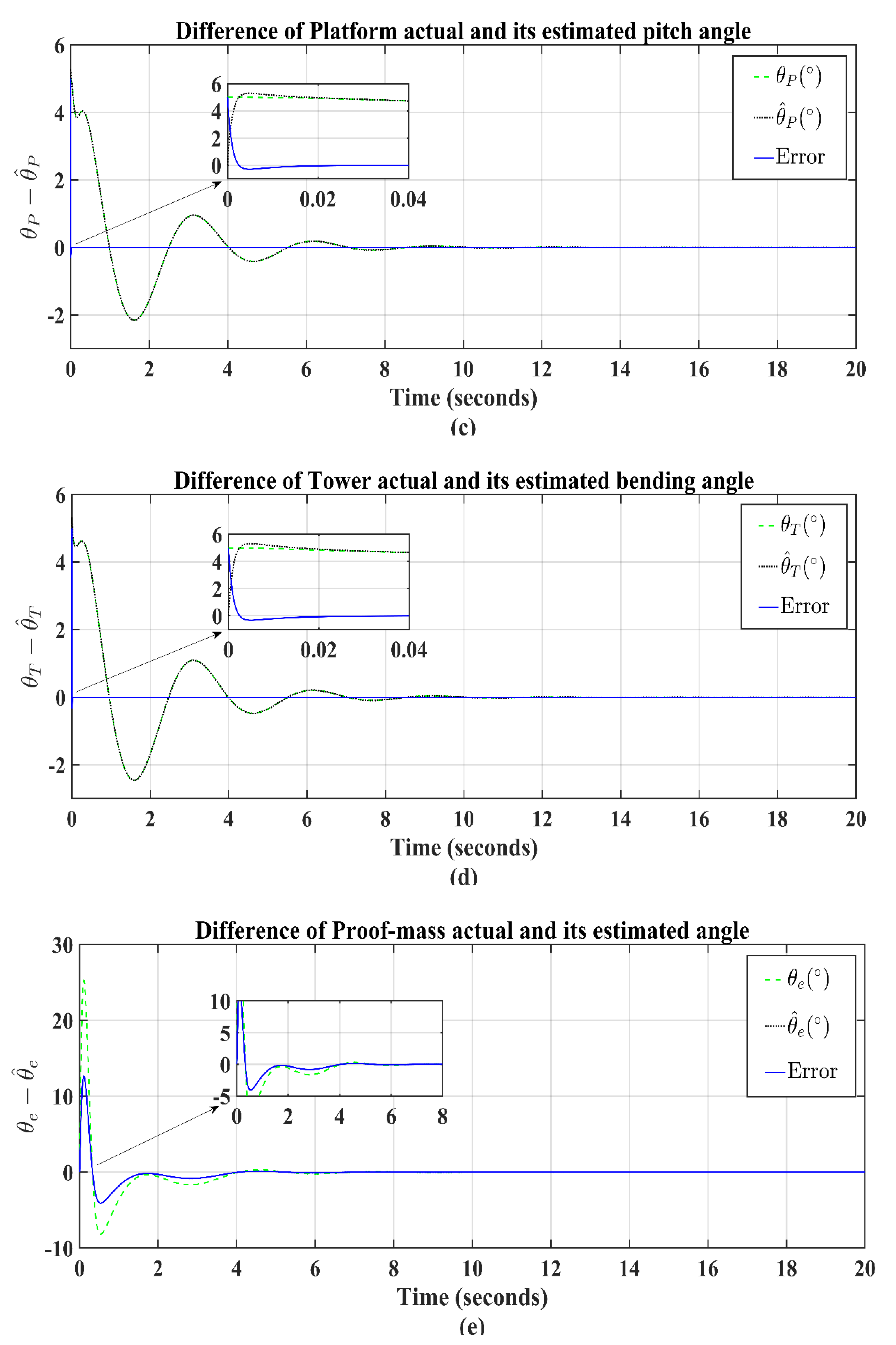
Figure 6. Using the HGO for the BLF−based adaptive backstepping ISMC, the original states and their estimated states with the respective error of the suggested model are shown in
Figure 7, where the numerical difference between the original and their estimated states are very minor, as shown in
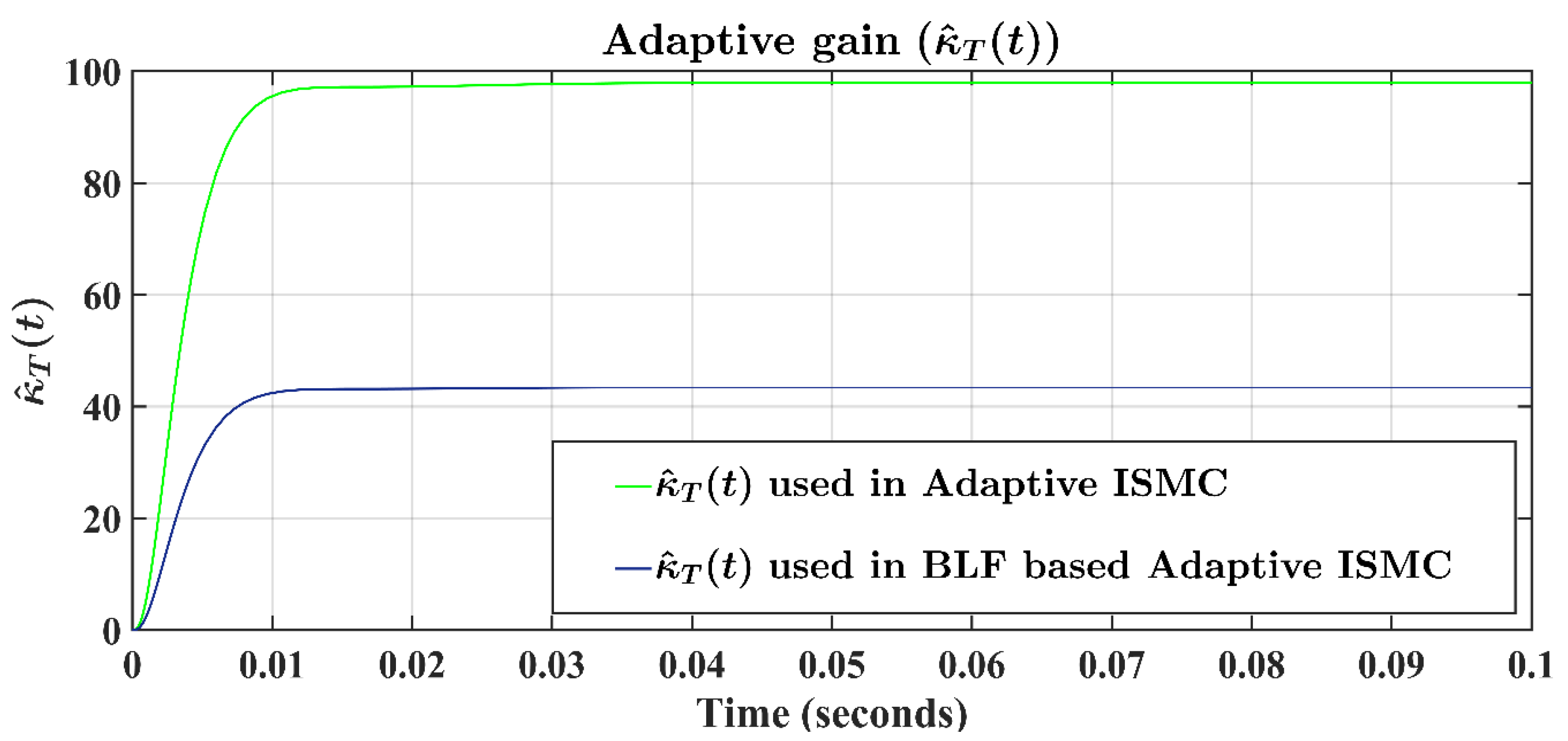
Table 2. This model works for all of the hypotheses provided in the modeling section. The response of the adaptive gains used in the adaptive backstepping ISMC and BLF-based adaptive backstepping ISMC algorithms are shown in
Figure 8, where the adaptive gain used in the adaptive backstepping ISMC settles at approximately 97 and the adaptive gain used in the BLF-based adaptive backstepping ISMC settles at approximately 43.




 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}