
Multi-AUV Formation Predictive Control Based on CNN-LSTM under Communication Constraints


Abstract
:1. Introduction
2. AUV Nonlinear Model Building and Feedback Linearization
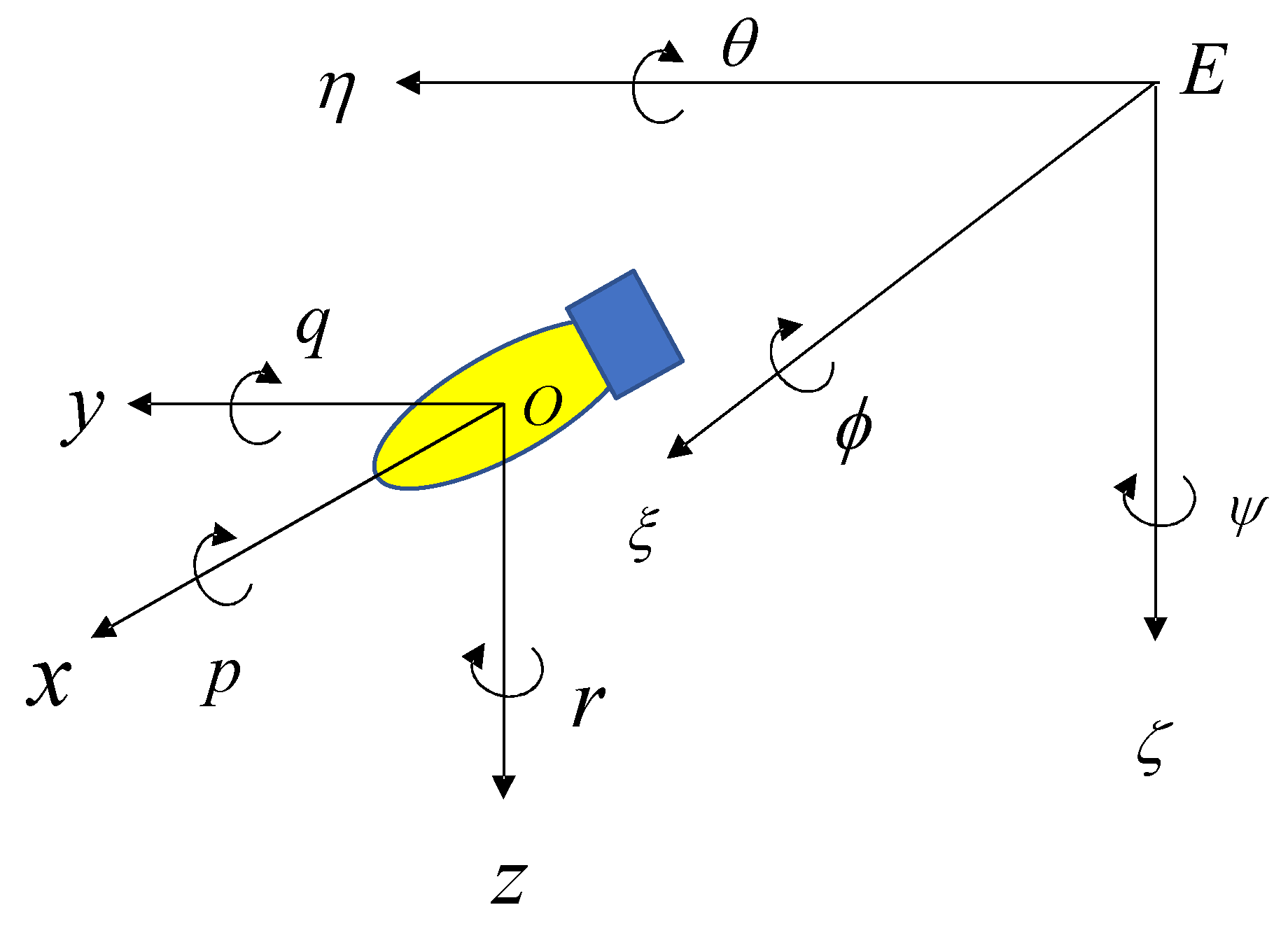
2.1. AUV Nonlinear Model
2.2. AUV Feedback Linearization Model
3. CNN-LSTM Prediction Model
3.1. Pre-Requisite Knowledge
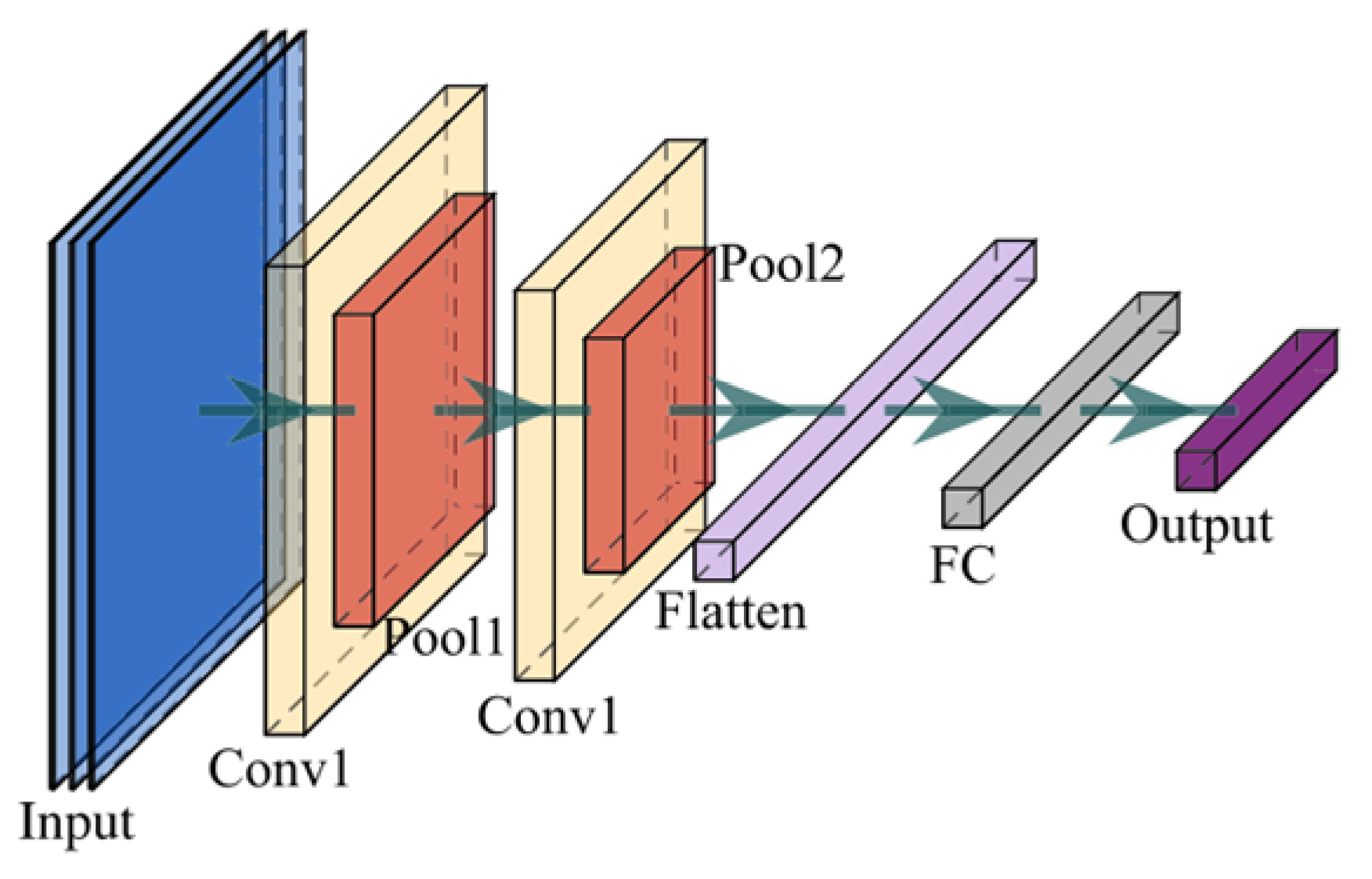
3.1.1. Convolutional Neural Network
- CNNs use a common filter for different regions, which reduces parameters, improves training speed, and prevents overfitting;
- The output of a CNN is related to only a portion of the input data due to the convolutional layers, which allows for the extraction of exclusive features for each input, whereas a traditional neural network is fully connected and outputs are related to all input units.
3.1.2. Long Short-Term Memory
3.2. CNN-LSTM Prediction Model Building
4. Predictive Control of Multi-AUV Formations Based on CNN-LSTM Models
4.1. Multi-AUV Formation Controller Design under Ideal Communication Conditions
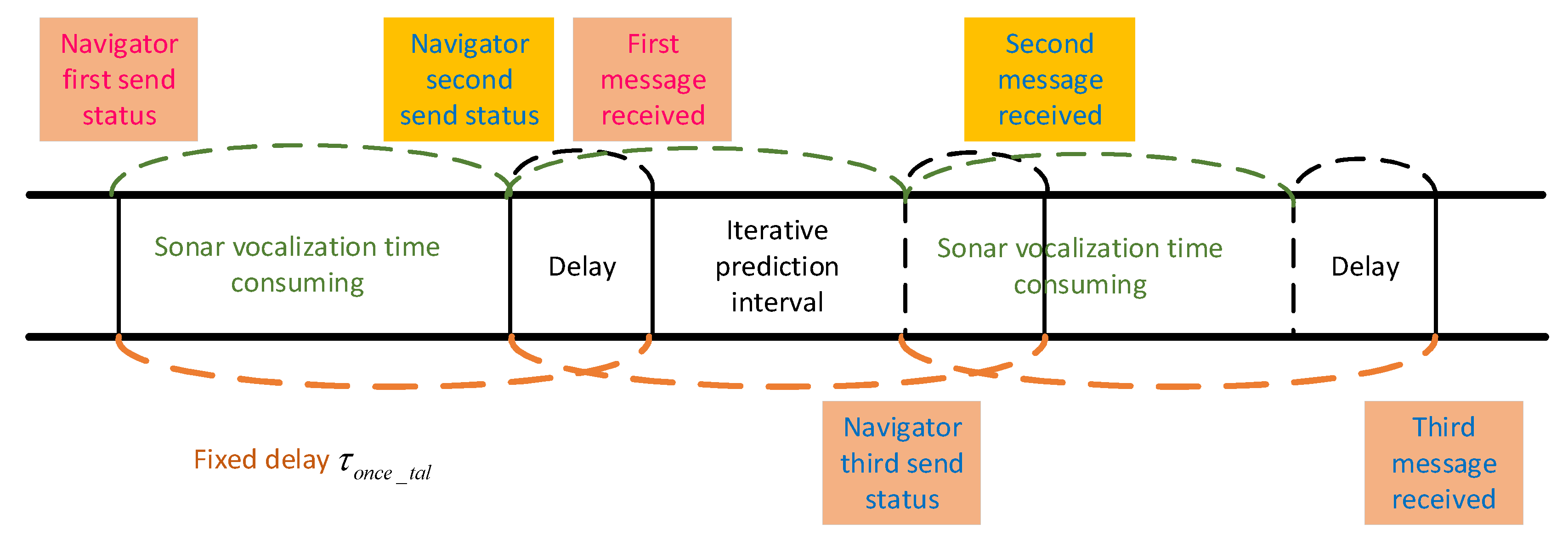
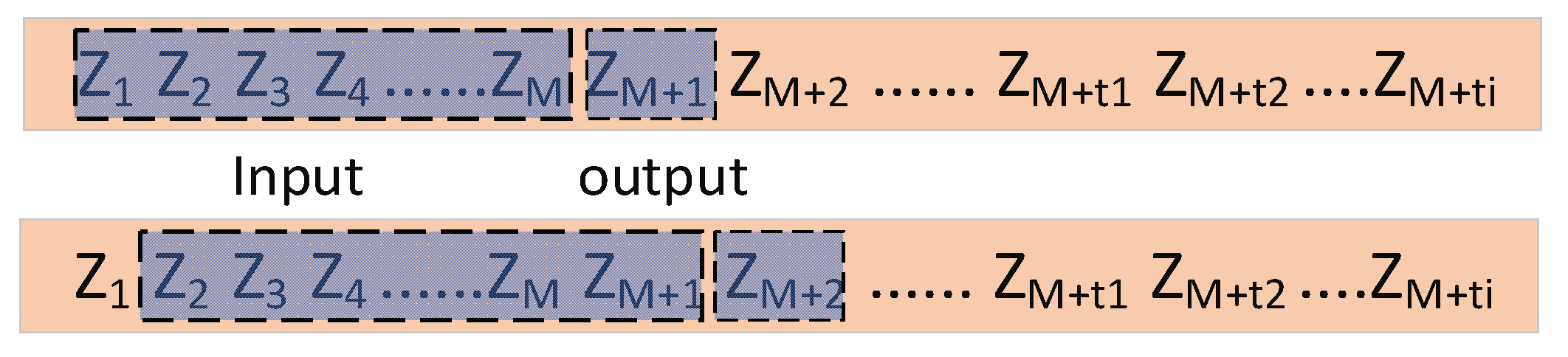
4.2. Sliding Window-Based Predictive Control of Multi-AUV Formations under Communication Constraints
5. Simulation Verification and Analysis
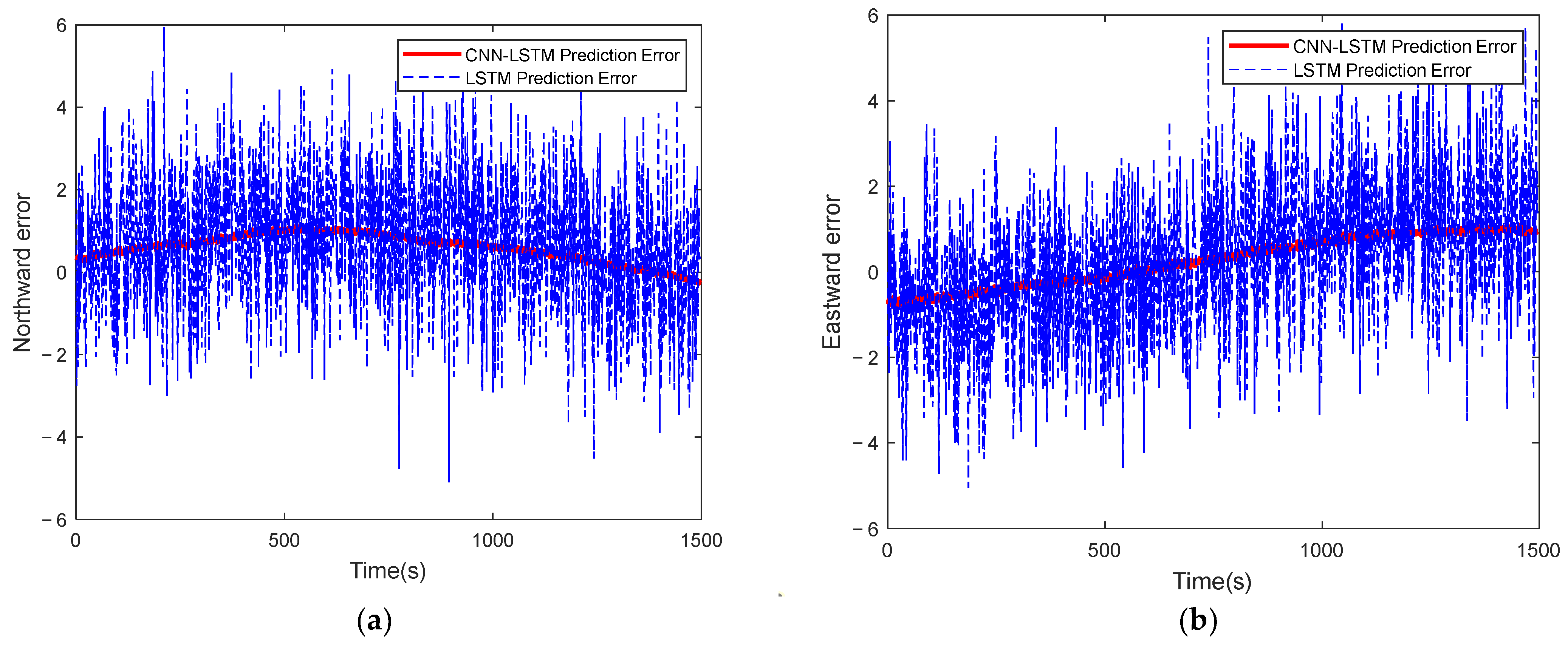
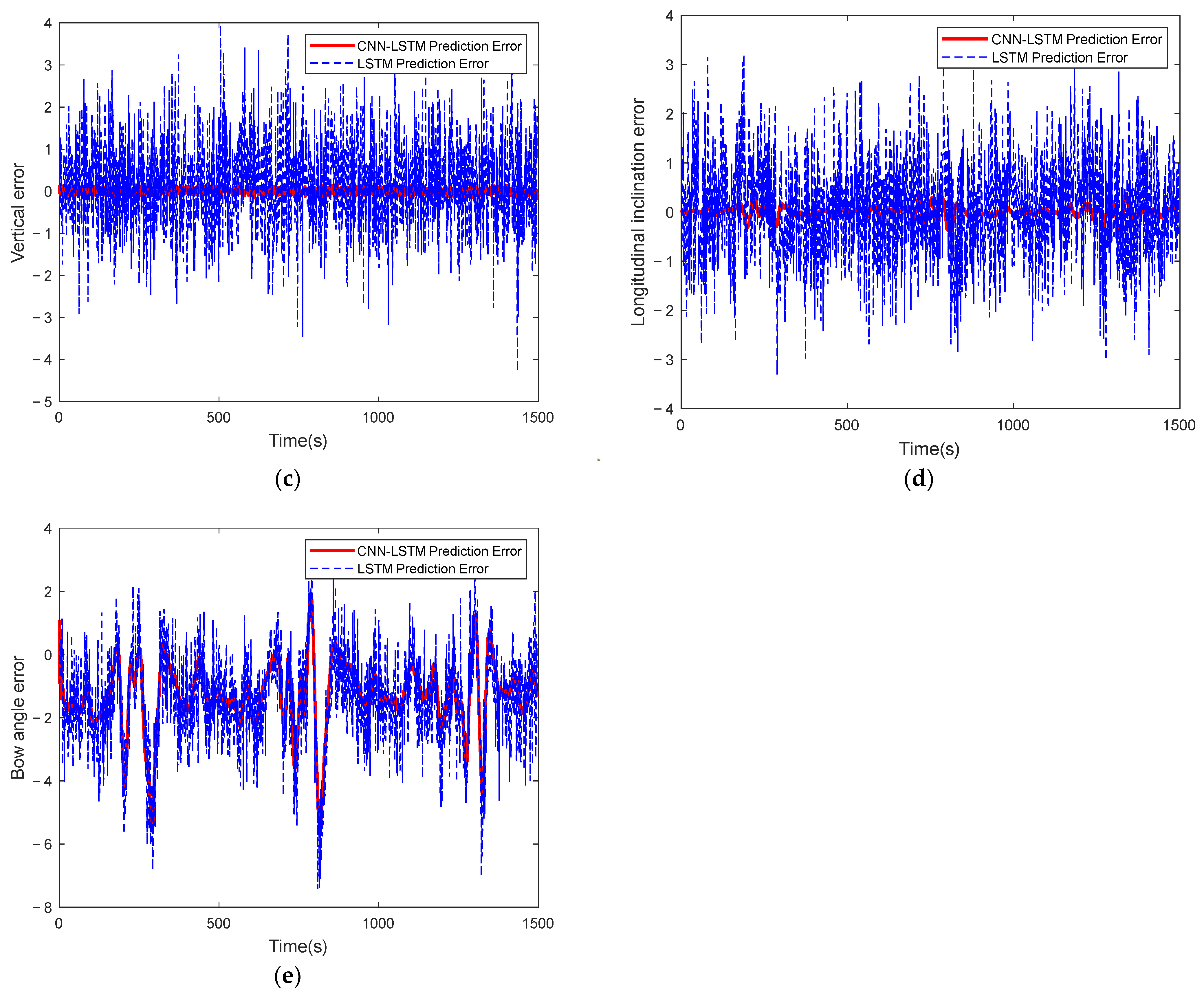
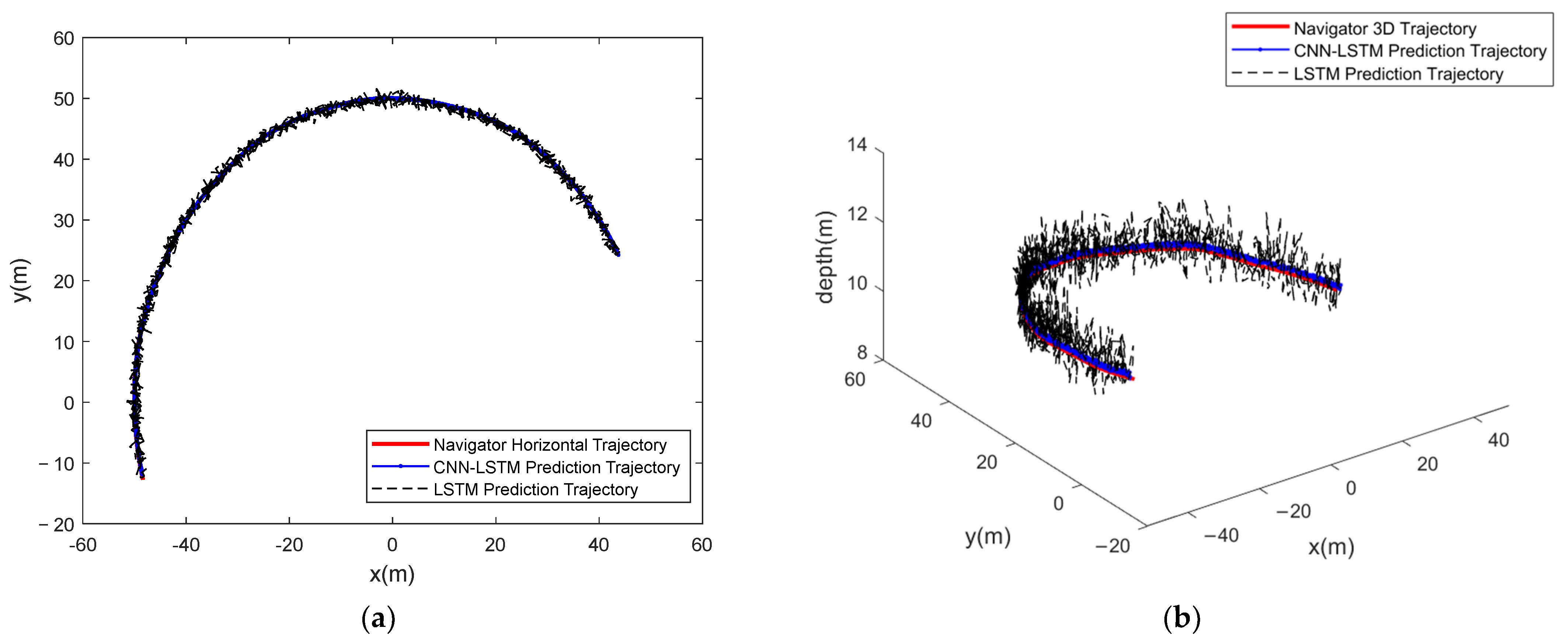
5.1. Simulation Results and Analysis of CNN-LSTM Model
5.2. Formatting of Mathematical Components
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Glaviano, F.; Esposito, R.; Di Cosmo, A.; Esposito, F.; Gerevini, L.; Ria, A.; Molinara, M.; Bruschi, P.; Costantini, M.; Zupo, V. Management and Sustainable Exploitation of Marine Environments through Smart Monitoring and Automation. J. Mar. Sci. Eng. 2022, 10, 297. [Google Scholar] [CrossRef]
- Wolek, A.; McMahon, J.; Dzikowicz, B.R.; Houston, B.H. The Orbiting Dubins Traveling Salesman Problem: Planning inspection tours for a minehunting AUV. Auton. Robot. 2021, 45, 31–49. [Google Scholar] [CrossRef]
- Ru, J.; Yu, H.; Liu, H.; Liu, J.; Zhang, X.; Xu, H. A Bounded Near-Bottom Cruise Trajectory Planning Algorithm for Underwater Vehicles. J. Mar. Sci. Eng. 2023, 11, 7. [Google Scholar] [CrossRef]
- Khan, J.U.; Cho, H.-S. Data-Gathering Scheme Using AUVs in Large-Scale Underwater Sensor Networks: A Multihop Approach. Sensors 2016, 16, 1626. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Xu, B.; Liu, B. An Automatic Search and Energy-Saving Continuous Tracking Algorithm for Underwater Targets Based on Prediction and Neural Network. J. Mar. Sci. Eng. 2022, 10, 283. [Google Scholar] [CrossRef]
- Chen, T.; Qu, X.; Zhang, Z.; Liang, X. Region-Searching of Multiple Autonomous Underwater Vehicles: A Distributed Cooperative Path-Maneuvering Control Approach. J. Mar. Sci. Eng. 2021, 9, 355. [Google Scholar] [CrossRef]
- Li, J.; Zhai, X.; Xu, J.; Li, C. Target Search Algorithm for AUV Based on Real-Time Perception Maps in Unknown Environment. Machines 2021, 9, 147. [Google Scholar] [CrossRef]
- Mao, S.; Yang, P.; Gao, D.; Bao, C.; Wang, Z. A Motion Planning Method for Unmanned Surface Vehicle Based on Improved RRT Algorithm. J. Mar. Sci. Eng. 2023, 11, 687. [Google Scholar] [CrossRef]
- Chen, Y.; Wu, W.; Jiang, P.; Wan, C. An Improved Bald Eagle Search Algorithm for Global Path Planning of Unmanned Vessel in Complicated Waterways. J. Mar. Sci. Eng. 2023, 11, 118. [Google Scholar] [CrossRef]
- Yan, Z.; Yue, L.; Zhou, J.; Pan, X.; Zhang, C. Formation Coordination Control of Leaderless Multi-AUV System with Double Independent Communication Topology and Nonconvex Control Input Constraints. J. Mar. Sci. Eng. 2023, 11, 107. [Google Scholar] [CrossRef]
- Yu, H.; Zeng, Z.; Guo, C. Coordinated Formation Control of Discrete-Time Autonomous Underwater Vehicles under Alterable Communication Topology with Time-Varying Delay. J. Mar. Sci. Eng. 2022, 10, 712. [Google Scholar] [CrossRef]
- Kang, X.; Xu, H.; Feng, X. Fuzzy Logic Based Behavior Fusion for Multi-AUV Formation Keeping in Uncertain Ocean Environment. In Proceedings of the OCEANS 2009, Biloxi, MS, USA, 26–29 October 2009; pp. 1–7. [Google Scholar]
- Borhaug, E.; Pavlov, A.; Pettersen, K.Y. Straight line path following for formations of underactuated underwater vehicles. In Proceedings of the 2007 IEEE 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007. [Google Scholar]
- Ding, G.; Zhu, D.; Sun, B. Formation control and obstacle avoidance of multi-AUV for 3-D underwater environment. In Proceedings of the 2014 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014. [Google Scholar]
- Li, J.; Zhang, Y.; Li, W. Formation Control of a Multi-Autonomous Underwater Vehicle Event-Triggered Mechanism Based on the Hungarian Algorithm. Machines 2021, 9, 346. [Google Scholar] [CrossRef]
- Chen, Y.; Guo, X.; Luo, G.; Liu, G. A Formation Control Method for AUV Group Under Communication Delay. Front. Bioeng. Biotechnol. 2022, 10, 848641. [Google Scholar] [CrossRef] [PubMed]
- Suryendu, C.; Subudhi, B. Formation Control of Multiple Autonomous Underwater Vehicles Under Communication Delays. In Proceedings of the 2020 IEEE Transactions on Circuits and Systems II: Express Briefs, Goa, India, 28 February 2020. [Google Scholar]
- Yang, S.; Chen, J.; Liu, F. Observer-Based Consensus Control of Multi-Agent Systems with Input Delay. In Proceedings of the 2018 IEEE 4th International Conference on Control Science and Systems Engineering (ICCSSE), Wuhan, China, 21–23 August 2018. [Google Scholar]
- Liu, Y.B. Research on Coordination Control of Multiple Underwater Vehicles for Ocean Exploratio. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2017. (In Chinese). [Google Scholar]
- He, Y.Y.; Yan, M.D. Nonlinear Control Theory and Application; Electronic Science and Technology University Press: Xi’an, China, 2007; pp. 115–119. (In Chinese) [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
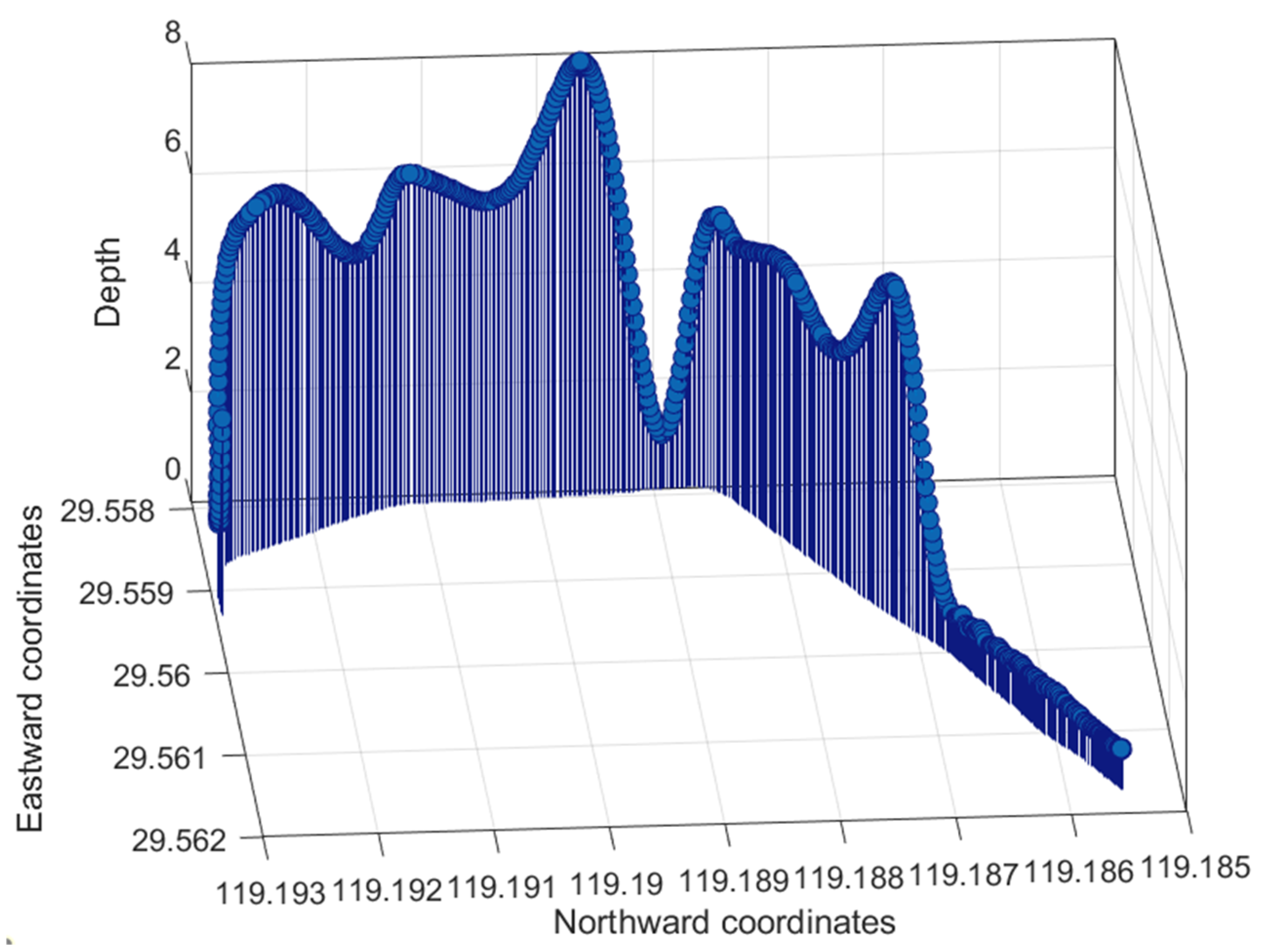
| Sample Size | Maximum Depth (m) | Lon | Lat | U (m/s) |
|---|---|---|---|---|
| 39,875 | 20 | 119.18° E | 29.56° N | 1–3 |
| Models | Structural Layer | Parameter Setting | Learning Rate |
|---|---|---|---|
| LSTM model | Hidden layer neurons | [10, 10, 10, 10] | 0.02 |
| activation function | ReLU | ||
| Optimizers | Adam | ||
| Epochs | 30 | ||
| Batch size | 128 | ||
| CNN-LSTM model | Filter 1 | ×16 size (2, 1) | 0.012 |
| Filter 2 | ×16 size (3, 1) | ||
| Filter 3 | ×16 size (3, 1) | ||
| Dropout ratio | 0.3 | ||
| Optimizers | Adam | ||
| LSTM cells 1 | 10 | ||
| LSTM cells 2 | 10 | ||
| Activation function | ReLU |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Tian, Z.; Zhang, G.; Li, W. Multi-AUV Formation Predictive Control Based on CNN-LSTM under Communication Constraints. J. Mar. Sci. Eng. 2023, 11, 873. https://doi.org/10.3390/jmse11040873
Li J, Tian Z, Zhang G, Li W. Multi-AUV Formation Predictive Control Based on CNN-LSTM under Communication Constraints. Journal of Marine Science and Engineering. 2023; 11(4):873. https://doi.org/10.3390/jmse11040873
Chicago/Turabian StyleLi, Juan, Zhenyang Tian, Gengshi Zhang, and Wenbo Li. 2023. "Multi-AUV Formation Predictive Control Based on CNN-LSTM under Communication Constraints" Journal of Marine Science and Engineering 11, no. 4: 873. https://doi.org/10.3390/jmse11040873
APA StyleLi, J., Tian, Z., Zhang, G., & Li, W. (2023). Multi-AUV Formation Predictive Control Based on CNN-LSTM under Communication Constraints. Journal of Marine Science and Engineering, 11(4), 873. https://doi.org/10.3390/jmse11040873