
Numerical Simulations of Tank Sloshing Problems Based on Moving Pseudo-Boundary Method of Fundamental Solution



Abstract
:1. Introduction
2. Governing Equation and Boundary Conditions
3. Numerical Methods
3.1. The Implementation of MFS
3.2. Time Marching
4. Numerical Results and Comparisons
4.1. Standing Waves in Fixed NWT
4.1.1. Convergence Study of the Number of Nodes and Time Step Size
4.1.2. The Numerical Solution of Standing Waves
4.2. Vertically Excited NWT
4.3. Horizontally Excited NWT
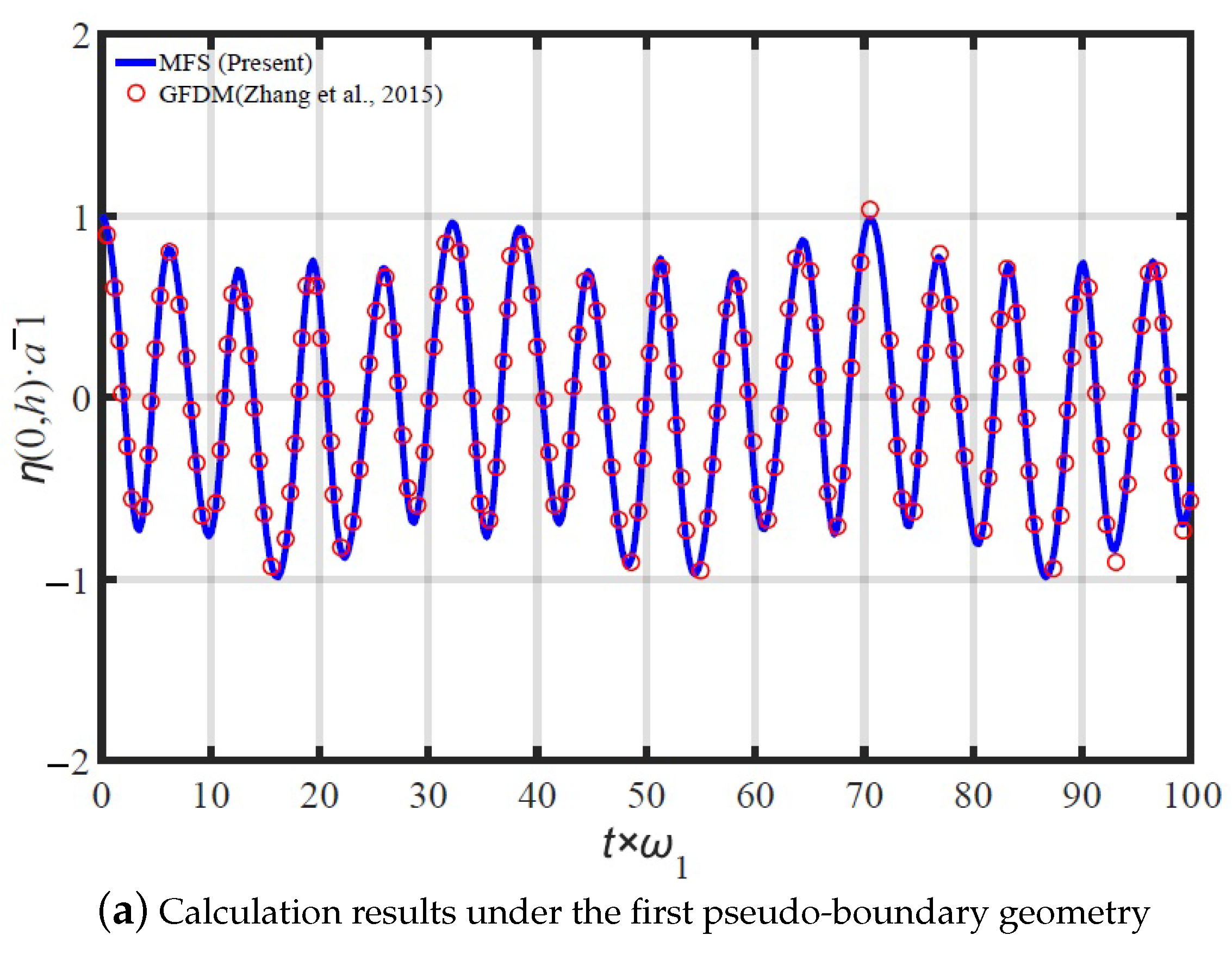
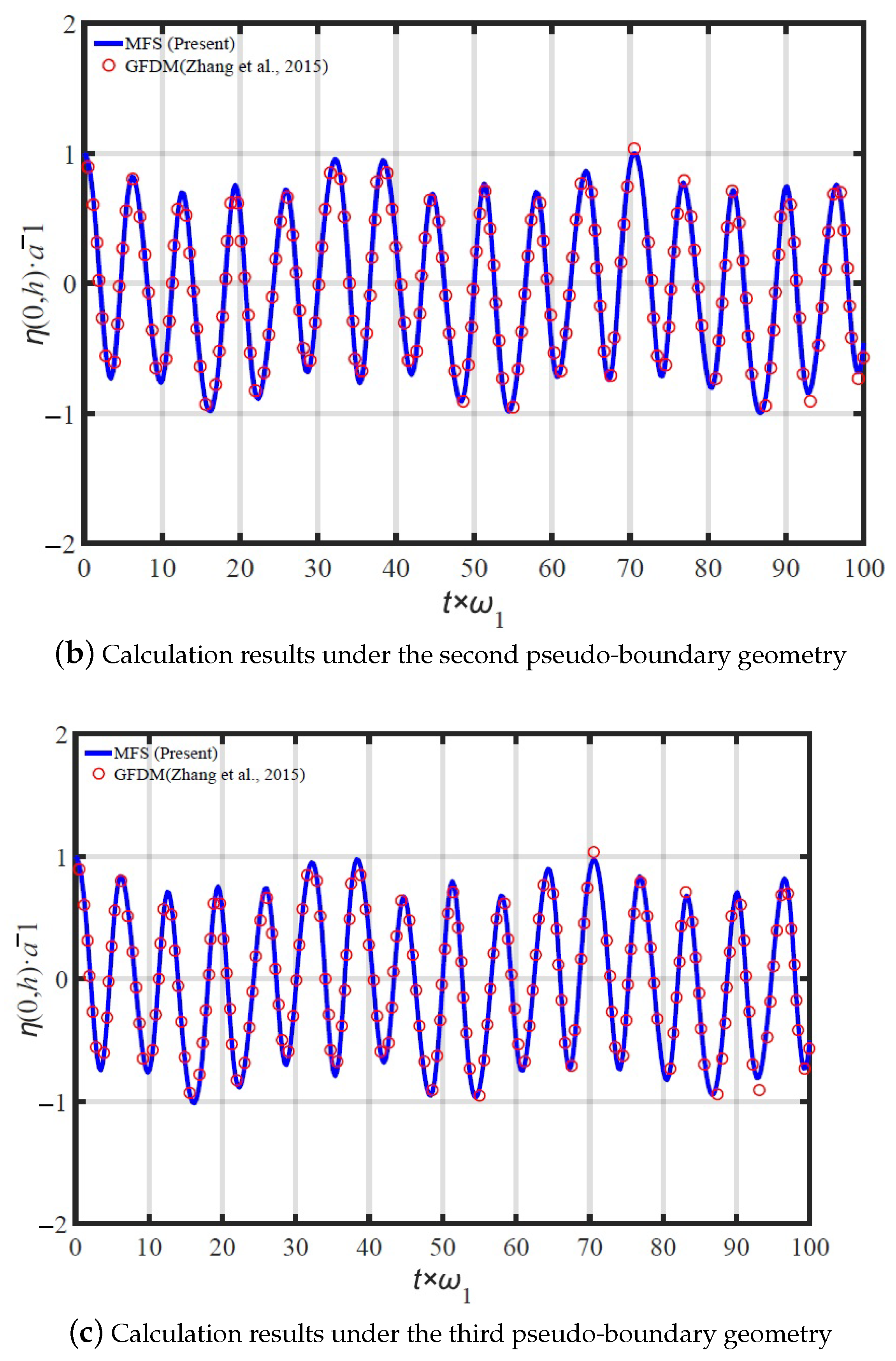
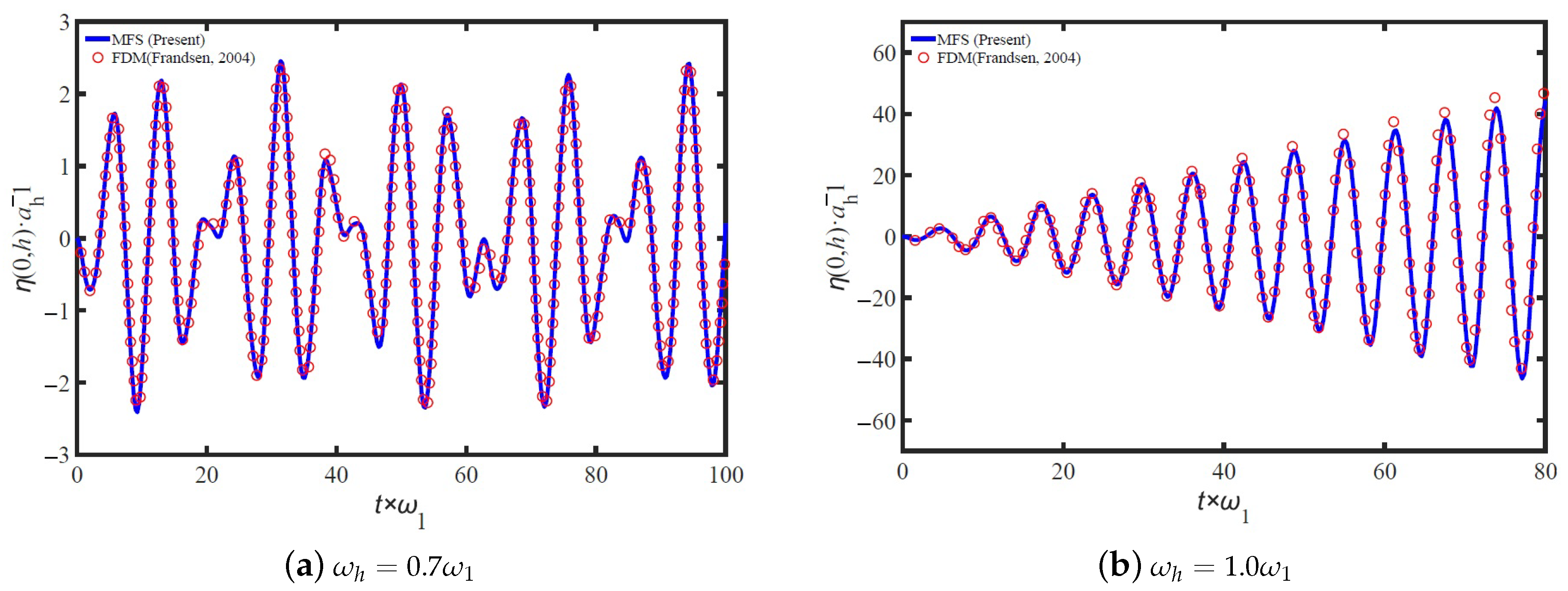
4.3.1. Validation of Numerical Scheme
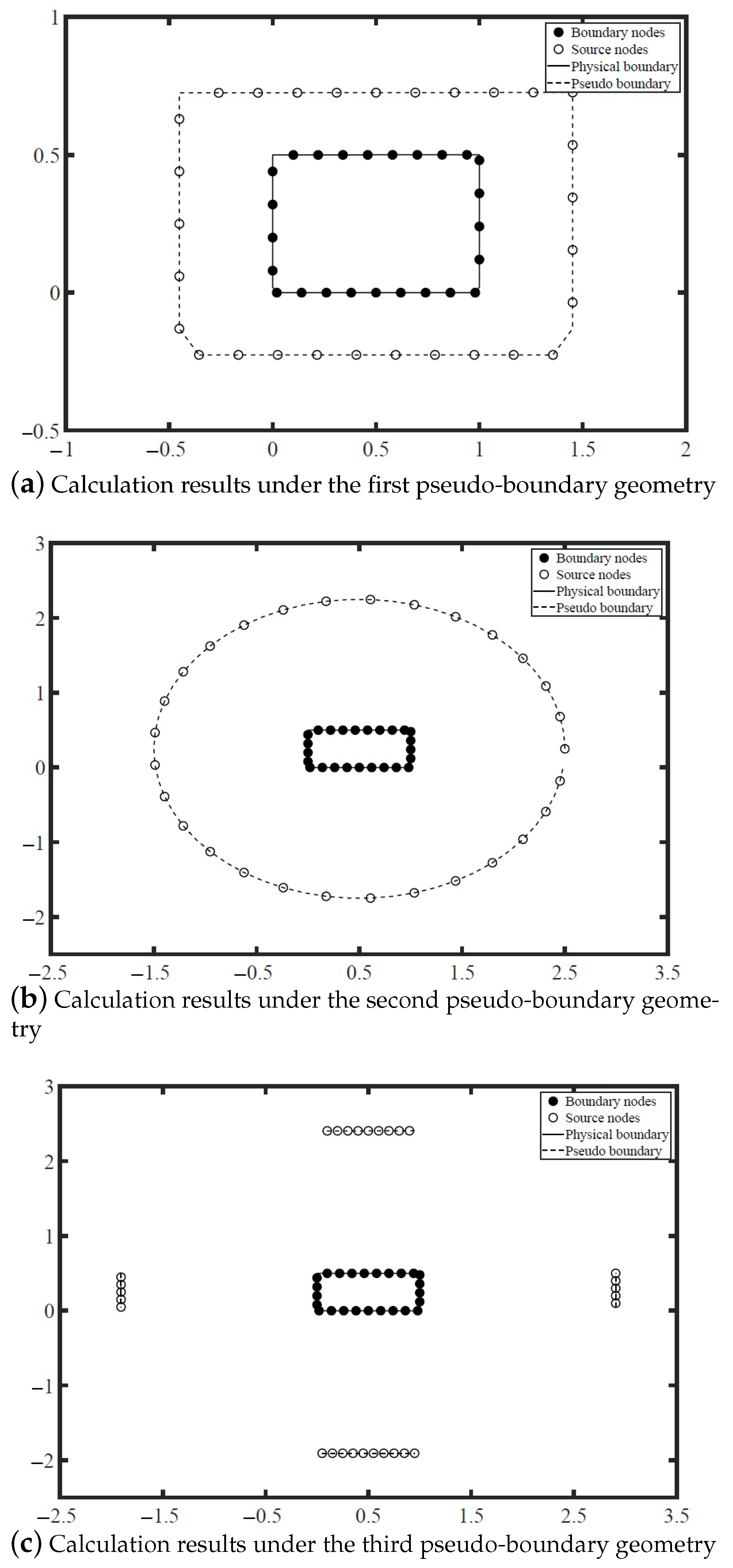
4.3.2. Distribution of Source Nodes after Iterations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| free surface elevation (m) | |
| h | height of still water (m) |
| b | width of the tank (m) |
| a | amplitude of the initial wave profile |
| g | acceleration due to gravity (m/s) |
| number of waves | |
| acceleration in the vertical direction (m/s) | |
| acceleration in the horizontal direction (m/s) |
References
- Gotoh, H.; Okayasu, A.; Watanabe, Y. Computational Wave Dynamics; World Scientific: Singapore, 2013. [Google Scholar]
- Ma, Q. Advances in Numerical Simulation of Nonlinear Water Waves; World Scientific: Singapore, 2010. [Google Scholar]
- Faltinsen, O.M.; Timokha, A.N. On sloshing modes in a circular tank. J. Fluid Mech. 2012, 695, 467–477. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.Z.; Khoo, B.C. Finite element analysis of two-dimensional nonlinear sloshing problems in random excitations. Ocean. Eng. 2005, 32, 107–133. [Google Scholar] [CrossRef]
- Mitra, S.; Upadhyay, P.P.; Sinhamahapatra, K.P. Slosh dynamics of inviscid fluids in two-dimensional tanks of various geometry using finite element method. Int. J. Numer. Methods Fluids 2010, 56, 1625–1651. [Google Scholar] [CrossRef]
- Gómez-GoI, J.; Garrido-Mendoza, C.A.; Cercós, J.; González, L. Two phase analysis of sloshing in a rectangular container with Volume of Fluid (VOF) methods. Ocean Eng. 2013, 73, 208–212. [Google Scholar] [CrossRef]
- Tang, Y.Y.; Liu, Y.D.; Chen, C.; Chen, Z.; Zheng, M.M. Numerical study of liquid sloshing in 3D LNG tanks with unequal baffle height allocation schemes. Ocean Eng. 2021, 234, 109181. [Google Scholar] [CrossRef]
- Hamano, K.; Murashige, S.; Hayami, K. Boundary element simulation of large amplitude standing waves in vessels. Eng. Anal. Bound. Elem. 2003, 27, 565–574. [Google Scholar] [CrossRef]
- Frandsen, J.B. Sloshing motions in excited tanks. J. Comput. Phys. 2004, 196, 53–87. [Google Scholar] [CrossRef]
- Wang, Z.H.; Jiang, S.C.; Bai, W.; Li, J.X. Liquid sloshing in a baffled rectangular tank under irregular excitations. Ocean Eng. 2023, 278, 114472. [Google Scholar] [CrossRef]
- Wu, N.J.; Chang, K.A. Simulation of free-surface waves in liquid sloshing using a domain-type meshless method. Int. J. Numer. Methods Fluids 2011, 67, 269–288. [Google Scholar] [CrossRef]
- Chen, Y.W.; Liu, C.S.; Chang, C.M.; Chang, J.R. Applications of the modified Trefftz method to the simulation of sloshing behaviours. Eng. Anal. Bound. Elem. 2010, 34, 581–598. [Google Scholar] [CrossRef]
- Zhang, T.; Ren, Y.F.; Fan, C.M.; Li, P.W. Simulation of two-dimensional sloshing phenomenon by generalized finite difference method. Eng. Anal. Bound. Elem. 2016, 63, 82–91. [Google Scholar] [CrossRef]
- Pal, P. Slosh dynamics of liquid-filled rigid containers: Two-dimensional meshless local Petrov-Galerkin approach. J. Eng. Mech. 2012, 138, 567–581. [Google Scholar] [CrossRef]
- Ren, Y.; Khayyer, A.; Lin, P.; Hu, X. Numerical modeling of sloshing flow interaction with an elastic baffle using SPHinXsys. Ocean Eng. 2023, 267, 113110. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, L.; Xu, M. Study on the Damping Effect and Mechanism of Vertical Slotted Screens Based on the BM-MPS Method. J. Mar. Sci. Eng. 2023, 11, 1270. [Google Scholar] [CrossRef]
- Li, D.; Xiao, H.; Jin, Y.C. Design optimization of sloshing tank using weakly compressible mesh free model. Ocean Eng. 2023, 284, 115218. [Google Scholar] [CrossRef]
- Gholamipoor, M.; Ghiasi, M. Numerical analysis of fully non-linear sloshing waves in an arbitrary shape tank by meshless method. Eng. Anal. Bound. Elem. 2022, 144, 366–379. [Google Scholar] [CrossRef]
- Luo, X.; Kareem, A.; Yu, L.; Yoo, S. A machine learning-based characterization framework for parametric representation of liquid sloshing. Results Eng. 2023, 18, 101148. [Google Scholar] [CrossRef]
- Kupradze, V.D.; Aleksidze, M.A. The method of functional equations for the approximate solution of certain boundary value problems. USSR Comput. Math. Math. Phys. 1964, 4, 82–126. [Google Scholar] [CrossRef]
- Fairweather, G.; Karageorghis, A. The method of fundamental solutions for elliptic boundary value problems. Adv. Comput. Math. 1998, 9, 69–95. [Google Scholar] [CrossRef]
- Kythe, P. Fundamental Solutions for Differential Operators and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1996. [Google Scholar]
- Young, D.; Hu, S.; Chen, C.; Fan, C.; Murugesan, K. Analysis of elliptical waveguides by the method of fundamental solutions. Microw. Opt. Technol. Lett. 2005, 44, 552–558. [Google Scholar] [CrossRef]
- Young, D.; Chiu, C.; Fan, C.; Tsai, C.; Lin, Y. Method of fundamental solutions for multidimensional Stokes equations by the dual-potential formulation. Eur. J. Mech.-B/Fluids 2006, 25, 877–893. [Google Scholar] [CrossRef]
- Mathon, R.; Johnston, R.L. The approximate solution of elliptic boundary-value problems by fundamental solutions. SIAM J. Numer. Anal. 1977, 14, 638–650. [Google Scholar] [CrossRef]
- Bogomolny, A. Fundamental solutions method for elliptic boundary value problems. SIAM J. Numer. Anal. 1985, 22, 644–669. [Google Scholar] [CrossRef]
- Wang, F.; Liu, C.S.; Qu, W. Optimal sources in the MFS by minimizing a new merit function: Energy gap functional. Appl. Math. Lett. 2018, 86, 229–235. [Google Scholar] [CrossRef]
- Hematiyan, M.; Haghighi, A.; Khosravifard, A. A two-constraint method for appropriate determination of the configuration of source and collocation points in the method of fundamental solutions for 2D Laplace equation. Adv. Appl. Math. Mech. 2017, 10, 554–580. [Google Scholar] [CrossRef]
- Gorzelańczyk, P.; Kołodziej, J.A. Some remarks concerning the shape of the source contour with application of the method of fundamental solutions to elastic torsion of prismatic rods. Eng. Anal. Bound. Elem. 2008, 32, 64–75. [Google Scholar] [CrossRef]
- Nishimura, R.; Nishimori, K. Arrangement of fictitious charges and contour points in charge simulation method for electrodes with 3-D asymmetrical structure by immune algorithm. J. Electrost. 2005, 63, 743–748. [Google Scholar] [CrossRef]
- Jopek, H.; Kołodziej, J. Application of genetic algorithms for optimal positions of source points in method of fundamental solutions. Comput. Assist. Mech. Eng. Sci. 2008, 15, 215–224. [Google Scholar]
- Grabski, J.K.; Karageorghis, A. Moving pseudo-boundary method of fundamental solutions for nonlinear potential problems. Eng. Anal. Bound. Elem. 2019, 105, 78–86. [Google Scholar] [CrossRef]
- Lin, B.H.; Chen, B.F.; Tsai, C.C. Method of fundamental solutions on simulating sloshing liquids in a 2D tank. Comput. Math. Appl. 2021, 88, 52–69. [Google Scholar] [CrossRef]
- Chen, B.F.; Chiang, H.W. Complete 2D and fully nonlinear analysis of ideal fluid in tanks. J. Eng. Mech. 1999, 125, 70–78. [Google Scholar] [CrossRef]
- Faltinsen, O.M. A nonlinear theory of sloshing in rectangular tanks. J. Ship Res. 1974, 18, 224–241. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Options of lsqnonlin | Default Value | Set Value |
|---|---|---|
| StepTolerance | ||
| FunctionTolerance | ||
| MaxFunctionEvaluations | 100 × number of variables | |
| MaxIterations | 400 | |
| OptimalityTolerance |
| Case Number | Number of Physical Boundary Nodes | Number of Pseudo-Boundary Nodes | Time Cost (Scheme 1) | Time Cost (Scheme 2) |
|---|---|---|---|---|
| Case 1 | = 59, = 30 | = 29, = 15 | 3232.9 s | 6998.1 s |
| Case 2 | = 49, = 25 | = 19, = 10 | 1094.1 s | 2658.6 s |
| Case 3 | = 39, = 20 | = 19, = 10 | 1021.7 s | 2186.1 s |
| Case 4 | = 19, = 10 | = 9, = 5 | 1245.2 s | 2879.5 s |
| Case | Number of Physical Boundary Nodes | Number of Pseudo-Boundary Nodes | Time Consumption |
|---|---|---|---|
| Domain-dependent pseudo-boundary type | 148 | 58 | 3.36 h |
| Circular pseudo-boundary type | 148 | 58 | 2.10 h |
| Boundary-dependent pseudo-boundary type | 148 | 58 | 4.19 h |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Zou, Y.; Huang, J.; Fan, C.-M. Numerical Simulations of Tank Sloshing Problems Based on Moving Pseudo-Boundary Method of Fundamental Solution. J. Mar. Sci. Eng. 2023, 11, 1448. https://doi.org/10.3390/jmse11071448
Wang C, Zou Y, Huang J, Fan C-M. Numerical Simulations of Tank Sloshing Problems Based on Moving Pseudo-Boundary Method of Fundamental Solution. Journal of Marine Science and Engineering. 2023; 11(7):1448. https://doi.org/10.3390/jmse11071448
Chicago/Turabian StyleWang, Chengyan, Yuanting Zou, Ji Huang, and Chia-Ming Fan. 2023. "Numerical Simulations of Tank Sloshing Problems Based on Moving Pseudo-Boundary Method of Fundamental Solution" Journal of Marine Science and Engineering 11, no. 7: 1448. https://doi.org/10.3390/jmse11071448
APA StyleWang, C., Zou, Y., Huang, J., & Fan, C. -M. (2023). Numerical Simulations of Tank Sloshing Problems Based on Moving Pseudo-Boundary Method of Fundamental Solution. Journal of Marine Science and Engineering, 11(7), 1448. https://doi.org/10.3390/jmse11071448