1. Introduction
The ocean is a significant source of food, energy, and valuable materials. In this regard, production from major offshore hydrocarbon fields began in the 1960s. The exhaustion of these fields and the continuous demand for hydrocarbon products has attracted offshore industry experts to explore and produce from fields located in deeper waters. These floating drilling/production systems are moored or tethered to the seabed via TCs [
1]. For station-keeping seabed operating vehicles, continuous human presence in the loop necessitates the utilization of TCs. Knowledge of cable dynamics is very important in ensuring the underwater tethered platform responds properly to external disturbances. Generally, TCs are used for electrical power supply and communication purposes between the surface ship and underwater vehicle/system [
2]. Tethers are a means for real-time telemetry and continuous power delivery between a surface station and a deployed underwater system. Moreover, TCs maintain a physical link with the deployed underwater vehicle and systems; therefore, they should work genuinely so that these systems operate safely and efficiently. It is likely that TCs will be used extensively in future underwater vehicles and systems [
3,
4,
5,
6]. The success of an underwater tethered vehicle’s operations is contingent on the ability of the human operator to control various operations of the vehicle. All the communications between the vehicle and the operator take place through the tether cable. To date, there are no wireless alternatives for subsea applications that can match the bandwidth provided by tether cables [
7].
Tethered underwater vehicles equipped with robotic manipulators are used for many tasks, such as the extraction of specimens, the repair of underwater structures, and the inspection of subsurface phenomena. The success of these tethered vehicles greatly depends on the ability of the human pilot(s) to control the vehicle motion and the motion of the robotic manipulators through haptic and visual interfaces. A TC is a bundle of electrical conductors and fiber optics. Communication between the pilot and vehicle can occur in real time, and scientific data can also be transmitted to the surface through the TC. Moreover, the accuracy of the UV dynamic model and the navigation of the UV depends on minimal disturbances from the TC to some extent [
8].
Numerous applications of marine cables, such as in oceanographic research, towing, hydrographic survey, salvage, telecommunications, and fishing, require accurate analysis to predict their static and dynamic behavior. A TC that connects a UV to the surface ship can be affected by many parameters, including the motions of either the UV or the vessel, the current along the cable, the total length of the cable itself, the diameter of the cable, and the density of the cable. TC configuration can be optimized through numerical simulations. TC analysis is a challenging task due to the difficulty in modeling the hydrodynamic forces, which in turn depend on the prevailing physical conditions. Hence, there is a need for a reliable and efficient solution technique for determining the cable profile and tensions [
1,
9,
10,
11].
Many researchers have modeled and analyzed underwater marine cable systems [
6,
11,
12,
13,
14,
15]. Generally, two types of techniques are used for tether cable analysis: steady-state analysis and time domain analysis. In [
16], a finite element method was used to model the hydro-elastic instability of a ship-towed array system in axial flow. Computer codes were established, and several validation examples were carried out. In [
17], Xu et al. used MATLAB code to model the position and tension estimation of an underwater cable system at certain depths using a finite element modeling and lumped mass technique.
There are several methods with different assumptions and considerations for the analysis of the motion of underwater cables or mooring lines, including analytical methods, the finite segment lumped mass method, the catenary method, the high-order finite element model, and the finite difference method. In the case of the high-order finite element analysis, there are more components and nodes as the length of the cable increases. The order of stiffness of the matrix rises as the number of elements and nodes increases, and the matrix becomes extremely sparse. Consequently, achieving convergence of the computing process is challenging and necessitates a significant amount of computation time. In the finite difference approach, discrete approximation of the differential, which is necessary for the finite difference technique, employs the function values of the discrete points to estimate the differential of the point. However, the finite difference technique is not appropriate for engineering issues with complex boundary conditions. An additional complication in applying the finite difference approach to the slack tether modeling is the limits on the mesh size that result due to the first-order finite differencing procedure. Due to these reasons, challenges exist in adapting both the finite difference and finite element cable modeling techniques to simulations of low-tension tethers. Of all these, the lumped mass method has been widely applied due to its ease of implementation and the accuracy of the numerical results.
The lumped mass and finite segment approach is the predominant method for submerged cable modeling and is considered to be more suitable for this work. As an element method, lumped parameter models are extremely modular and can easily accommodate the insertion of other elements such as vehicles, buoyancy/ depressor elements at interior points, or end boundary locations of the discretization scheme. To date, the finite segment and lumped mass approach has remained extremely popular since its inception by Walton and Polacheck [
18]. The problem can be applied to a variety of problems. It is used to study the response of buoy-suspended cables and pipelines in three dimensions to cross currents and wave motion. It can be used to study the dynamic analysis of single point moorings and multiple submerged buoys along a single mooring line, buoy-cable system for aquaculture application and multi-component mooring lines in the dynamic response of a station-keeping vessel. Moreover, tow cables and towed vehicles for various towing ship maneuvers, dynamics of a slender towed array of acoustic sensors in three dimensions and low-tension tether cables of ROVs can also be studied with this method. The flexibility of the method to simulate such a wide range of cases makes the lumped mass method a favored approach to offshore engineering experts.
In [
19,
20], the finite element modeling technique was used for the analysis of underwater cable systems. In these studies, underwater cables were studied as a series of rigid rods connected by frictionless joints. These segments have identical formulations of joints, forces, and constraints. The mass of each segment is supposed to be at the end of the segment under consideration. In other words, lumped masses are connected by inextensible massless rods. In this case, the effect of drag forces and fluid motion can be augmented in rods. Dynamic equations are iteratively solved using the boundary condition of surface ship position and velocity of the lower end. Buckham et al. [
6] applied the finite element method to calculate the tension and bending force in a slack tether attached to an ROV.
In the quasi-static approximation method, the tether cable consists of a series of finite, linear, inextensible segments connected by massless pin joints. In this case, the mass of the tether segments is assumed to be distributed evenly over the length of the finite linear segments. In the finite segment and lumped parameter models, the tether elasticity is neglected, and the elements are considered to be rigid. The tension within each element is considered as an additional state variable, and geometric constraints that ensure constant element length are used to iteratively solve for these tension values. The assembly of forces that operate over the entire cable element are lumped at the center of gravity of the element. Many people have studied the quasi-static approach for the dynamic analysis of underwater cables. In [
21], a quasi-static problem in two dimensions using a lumped parameter model explicitly defined the nodal velocities, which were integrated using a fourth-order Runge–Kutta integrator to produce a history of cable motion. In [
22], an analysis of the quasi-static dynamics of a slender towed array of acoustic sensors in three dimensions was presented. In this study, tether cable was taken as a series of finite, linear, inextensible segments. The mass of the tether segments is to be distributed evenly over the length of the finite linear segments, giving rise to the inclusion of rotational inertia terms and coordinates specifically to the orientation of the tether segments. In [
23], finite segment formulation against experimental data describing the motion of an anchor cable was validated by Kamma et al. They also presented the use of this finite segment model in simulating buoy motion in three dimensions [
24].
The use of numerical models to simulate the dynamics of underwater vehicles and marine cables has been presented extensively in the literature. Numerical models provide a means for the analysis of TC dynamics, deep water moorings, and marine risers before the actual development and/or deployment of the system [
25]. An application that has not yet seen significant attention is the simulation of underwater seabed walking vehicles with slack tethers. Despite advances in autonomous technology, underwater tethered vehicles are still the predominant tool for complex intervention tasks. These vehicles typically follow omnidirectional paths during operation and deploy low-tension or slack neutrally buoyant tethers along the path. Travel to the limits of the tether, sudden movements of the UVs and/or environmental loads can cause the tether to become taut. To develop numerical dynamics models for the motion of the slack TC, it is necessary to develop an accurate representation of the external and internal effects that contribute significantly to the motion of the slackened tether. To ensure that the tether cables forces transmitted to the UV are minimal, the tether cable design is such that it retains relatively high flexibility and neutral buoyancy. In addition, an extra tether cable is deployed, creating a curvilinear tether lay, to ensure a low-tension or slack state [
11].
In [
26], the dynamic behavior of a marine cable with variable length during turning maneuvers were explored. The cable was discretized into a lumped mass model using the lumped mass method, and a dynamic analysis model of the turning process of the marine cable was established for different release speeds and water depths. Time domain coupling analysis was used to determine the dynamic changes in configuration and stress of marine towing cable at various speeds and depths of water. In [
27], the finite element model of the variable-length underwater cable with geometrically nonlinear motion was presented. Nonlinear, time-varying differential equations are derived from the theorem of linear and angular momentum, and its weak formulation was obtained by the principle of D’Alembert–Lagrange. Via a series of consistent linearization with the Frechet derivative and discretization with the iso-parametric interpolation, the governing finite element model for this variable-length cable was established. Then, the corresponding Newmark implicit time integration formulation was derived, and a scheme of adaptive step size was proposed to avoid convergence difficulty during the numerical calculation. The performance of the proposed approaches is further assessed with numerical cases, which take into consideration the top alternating excitation, the terminal follower forces, and the sea current along the cable. In [
28], a study on the dynamic modeling and the motion simulation of an unmanned ocean platform, an unmanned underwater vehicle with an underwater cable, was performed. Newton’s second law and lumped mass method were used to derive the equations of motion of unmanned surface vehicles, unmanned underwater vehicles, and underwater cables.
In [
29], modeling the behavior of an underwater vehicle operating in the coastal water, including the tether cable effect, was presented. A new simulation method for combining the rigid body motion of the underwater vehicle and the flexible motion of the cable equation was performed. For flexible cable dynamics modeling, governing equations of the TC dynamics were established based on the catenary equation method, and the shooting method was applied to solve the two-point boundary value problem of the catenary equation. The formulation and solution of the governing equations to estimate the position and forces of the tether cable endpoint under the action of concentrated and distributed forces due to underwater currents were proposed. In [
30], motion analysis of a coupled unmanned surface vehicle, umbilical cable and unmanned underwater vehicle system was investigated, in which multi-body dynamics of the coupled system was employed. The unmanned surface vehicle and unmanned underwater vehicle are modeled as rigid-body vehicles, and the flexible cable is discretized using the catenary equation. For the nonlinear coupled dynamics of the vehicles and flexible cable, the fourth-order Runge–Kutta numerical method is implemented. For cable dynamics, the shooting method is applied to solve a two-point boundary value problem of the catenary equation. A computer simulation was used to study the behavior of the coupled unmanned surface vehicle, umbilical cable, and unmanned underwater vehicle system. Resultantly, the variations in the cable forces and moments at the tow points and the underwater configuration of the cable were investigated.
According to the work presented in [
31], the onboard operator will control vehicle locomotion and manipulator operation through real-time telemetry and visual interfaces afforded by TC. The study of tether cable dynamics being deployed from surface ship to seabed walking robot, an instance of slack tether in seabed operations, was a primary motivation for the furthering of the finite segment and lumped mass approach. In this case, TC generally maintains a low-tension state. Environmental disturbances that accumulate over the TC may affect UMSWR operations to some extent. The focus of this work is the development of a low-tension TC dynamics model for application in UMSWR simulation. In this work, the development and implementation of a lumped mass strategy for the dynamic modeling of TC for UMSWR is carried out. The theoretical and mathematical development of the model will be discussed. It includes a discretization scheme for TC geometry and the methodology for the calculation of the internal and external forces acting over the TC. The modeling methodology presented provides the foundation for the subsequent developments of strategy for the simulation of the TC motion that occurs during the locomotion of UMSWR on the seabed. In simulating the hydrodynamic performance of the TC system, the coupling effect between the TC and the UMSWR is neglected, and the hydrodynamic model is composed of TC dynamics only. For applications where knowledge of the bending and torsional moments are not considered, linear elements are used since the linear lumped mass elements do not exhibit any curvature or twist. While it does not include low-tension bending and torsional effects, the lumped mass and finite segment approach has been demonstrated accurately in underwater hydrodynamic applications while requiring significantly less computational expenses than the similar finite segment approach. Given the success of simple linear models, we choose to follow the approach of these simpler methods to the approximation of the hydrodynamics, tether profile and axial forces acting over the tether element.
The second most important motivation and challenge is the inclusion of the variable environmental parameters in the modeling of TC dynamics. Generally, in underwater cable systems, one of the key factors affecting system analysis accuracy is the influence of the underwater environment on the behavior of the cable system. The most important environmental parameters include variable water density and variable surface currents. This variation in the seawater density results in the net positive buoyancy or net negative buoyancy force on the cable in water. This buoyancy effect must be included for hundreds and thousands of meters of submerged cable. Similarly, variable surface current changes the position and posture of the flexible underwater cable very easily, which results in a change in the position and posture of the underwater cable system. After conducting a literature survey of existing work on underwater cable problems, it was revealed that many researchers had dealt with cable problems, neglecting the variable surface current and variable water density effects. Considering the environmental parameters in underwater cable problem analysis had been treated rarely by a few. Water current is either neglected or taken as a constant value. For water density, it is taken as a constant value, but in practice, the density of water changes with depth. Anticipating deficiency with these features, the author decided to develop a new formulation, which could readily handle the inclusion of variable environmental parameters, and which could easily be implemented on physical systems.
The remainder of this manuscript is organized as follows:
Section 2 describes the problem statement and the system components used in this study. Included in the section is a description of the tether cable attached to the seabed walking robot and associated surface platform arrangement, and information about the tether cable.
Section 3 discusses the methods used in modeling tether cable dynamics. First, an explanation of the basic assumption, mathematical modeling, reference frame system, environmental parameters, cable discretization, and element force definition is given. Next, the development of governing equations of motion for the tether cable procedure is discussed, followed by tether cable geometry and tension computation and the steps necessary for numerical calculations and numerical implementation of the dynamic model.
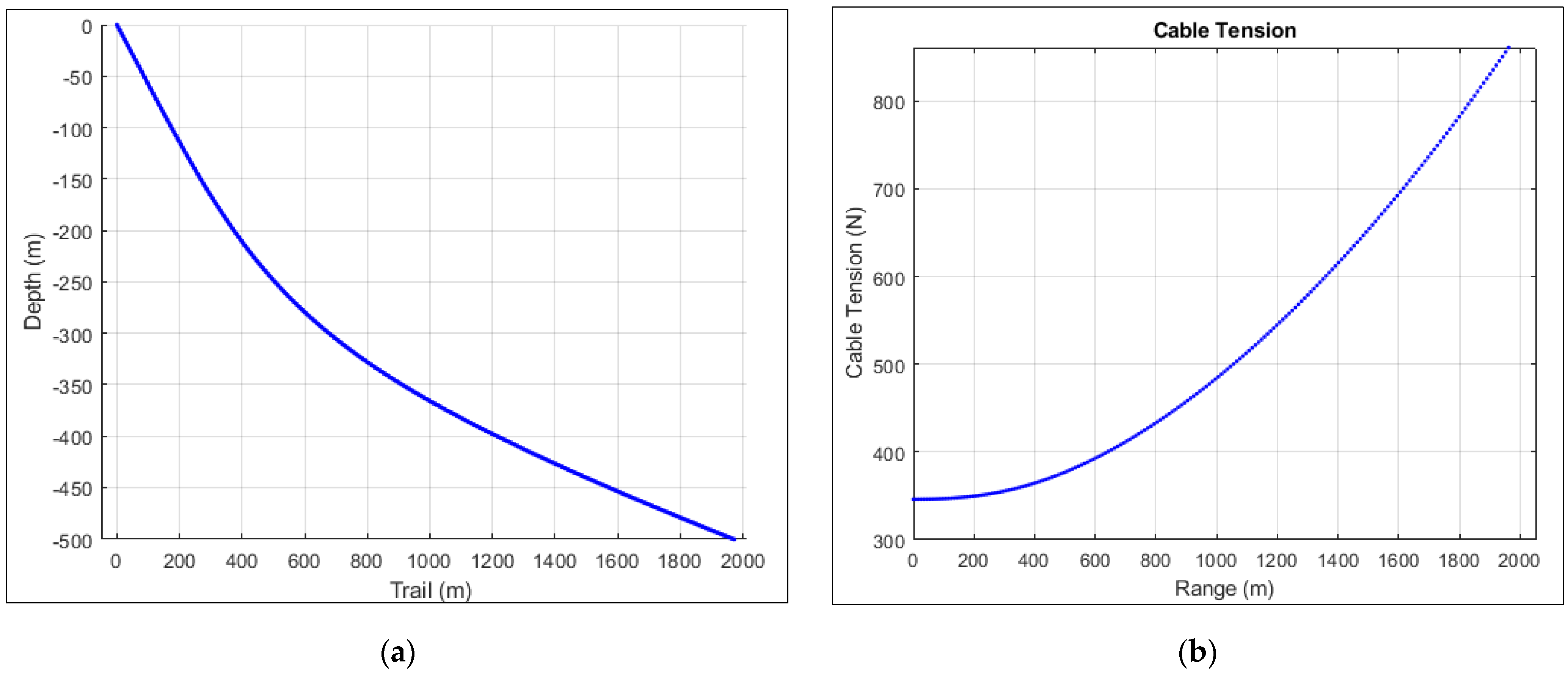
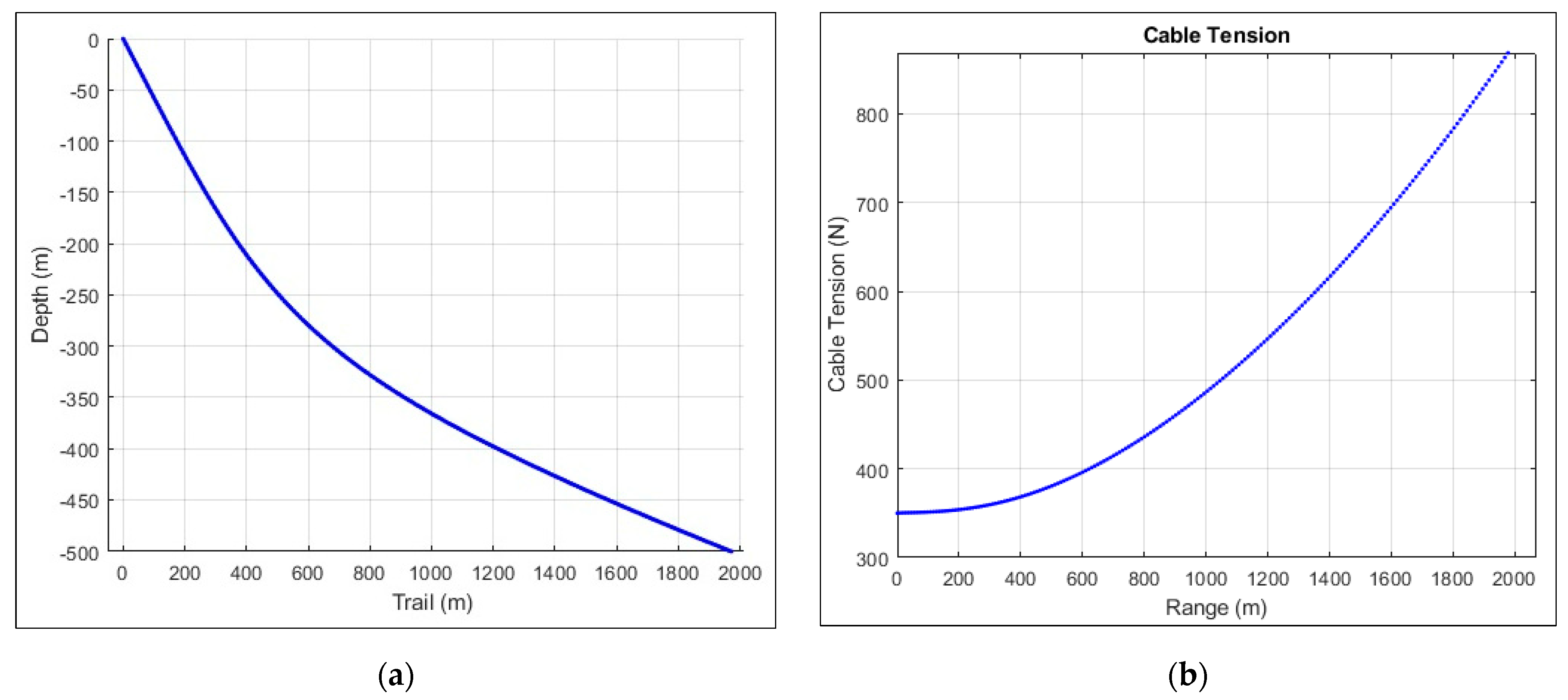
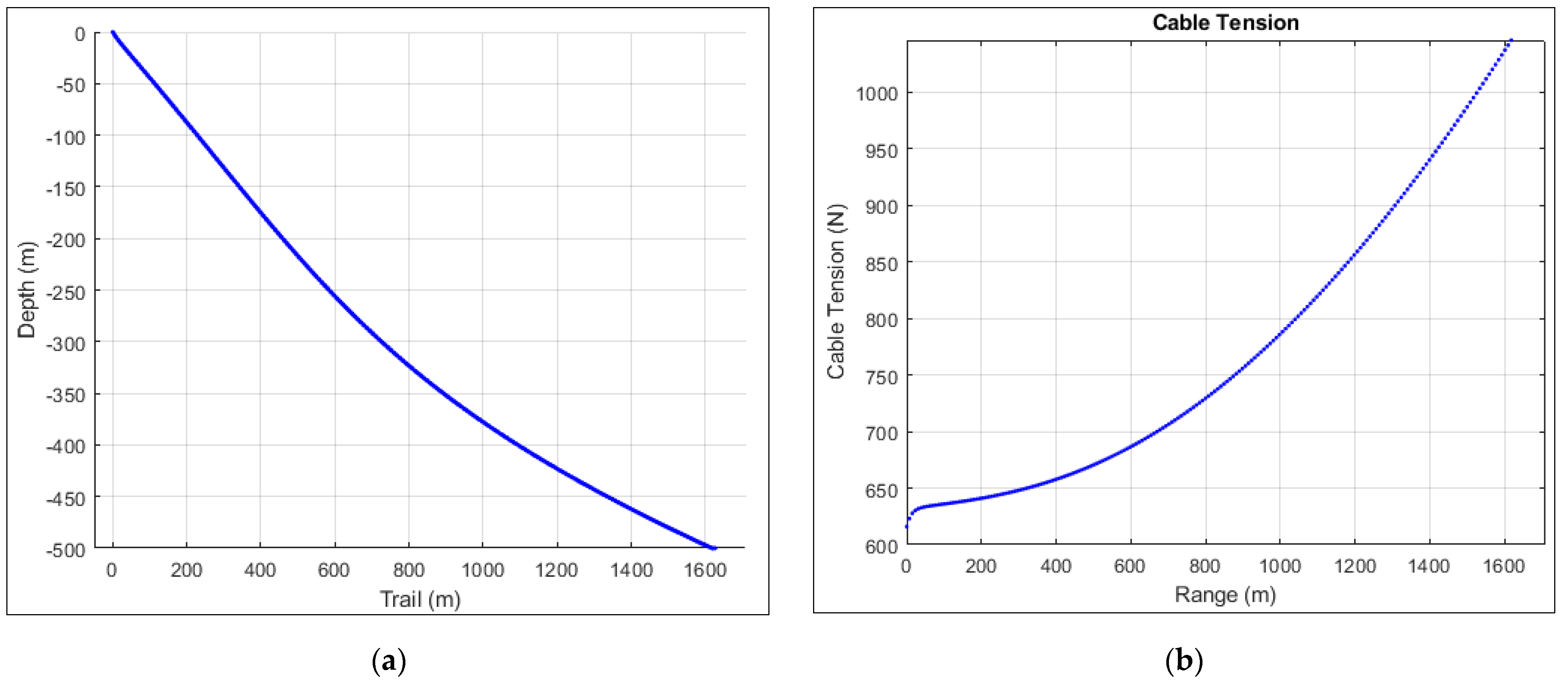
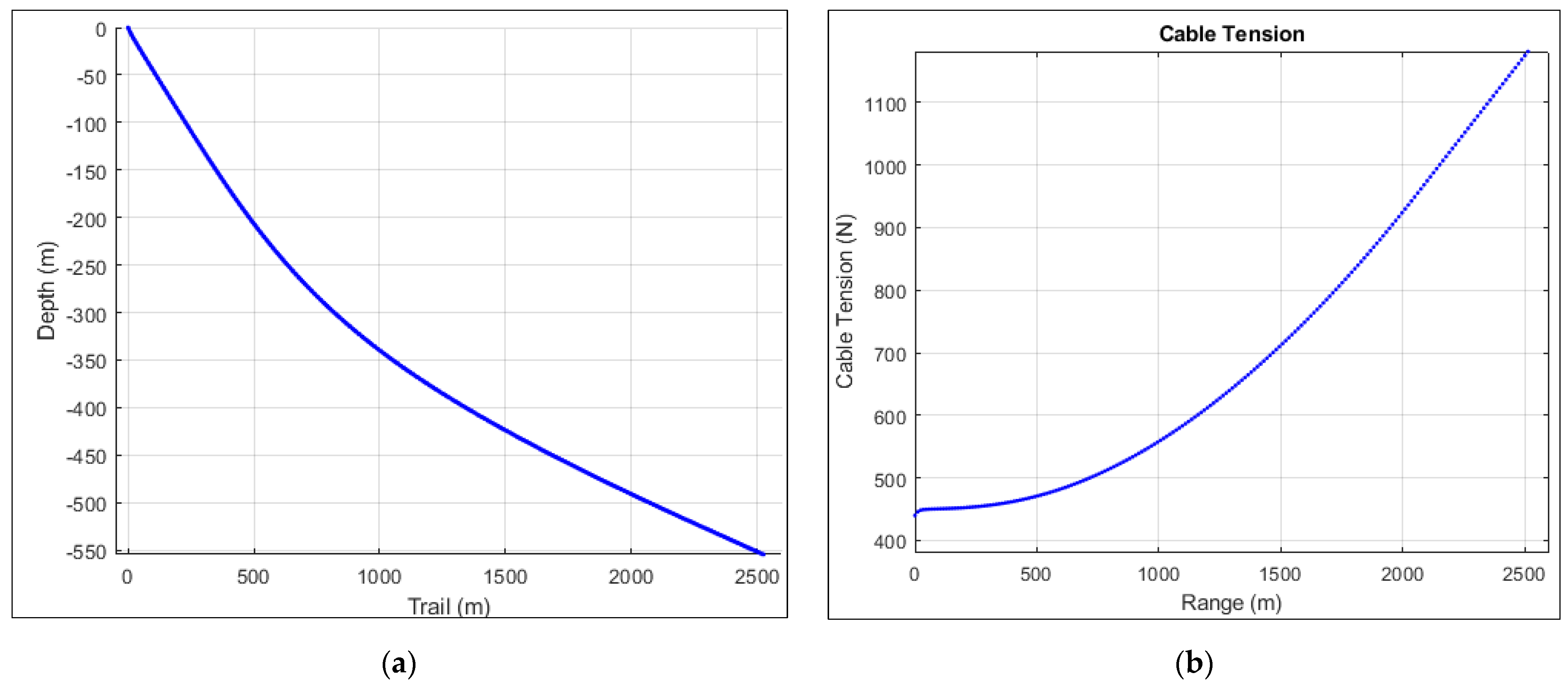
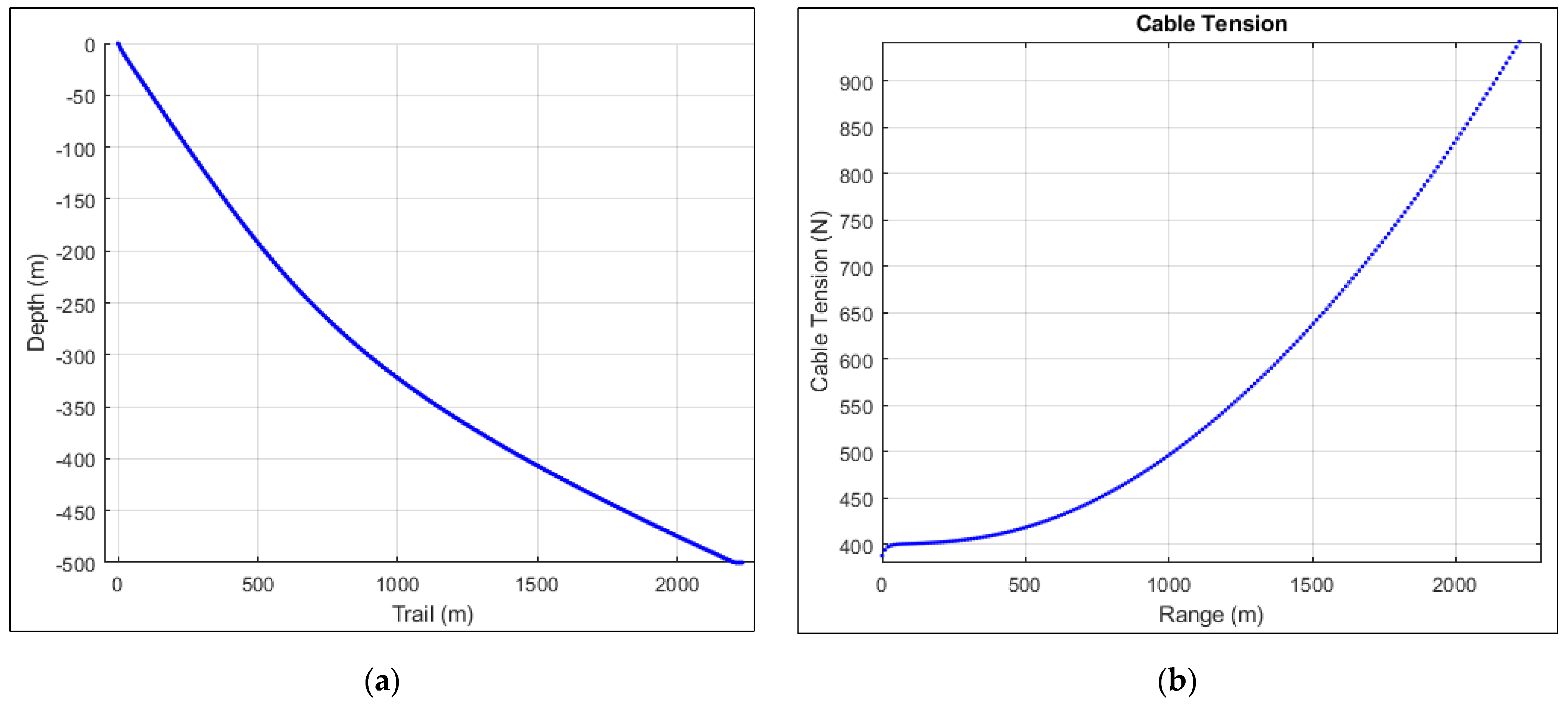
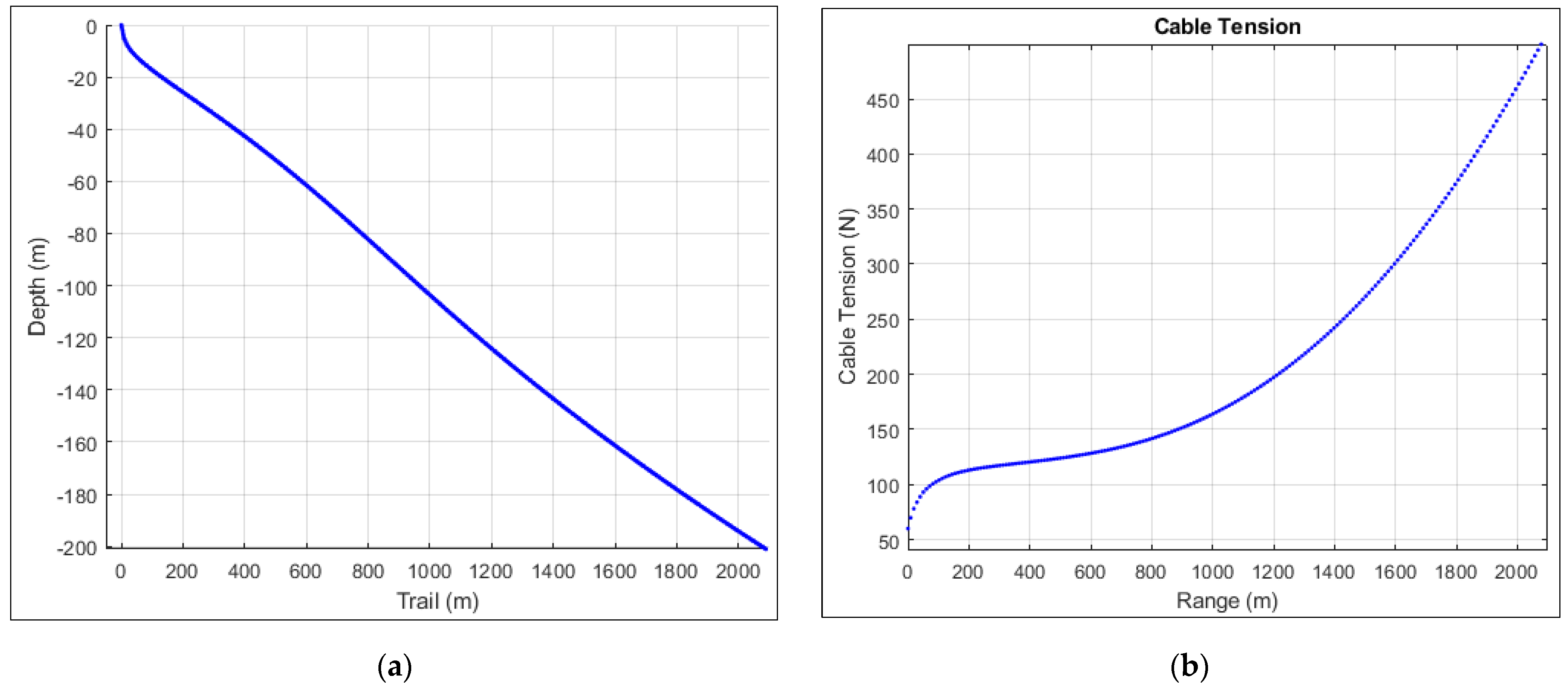
Section 4 presents the results of the simulation study. Figures are presented that show the tether cable profile and tension values in the tether cable and their dependence on various input parameters for the simulation cases that were performed. Calculations are mentioned and explained in context with their effects on the results. Then, the results of the cable profile and tension values in the tether cable are discussed.
Section 5 summarizes the study and formulates conclusions based on the results obtained in
Section 4. Authors’ contribution, Funding, Conflict of interest and References follow the conclusion at the end of the paper.
3. Materials and Methods
3.1. Modeling of the Tether Cable System
In [
34], tether cable selection from electrical and mechanical perspectives is discussed. For the design of tether cable, primary inputs such as the vehicle missions, number of major loads and maximum power demand are considered. Moreover, the maximum depth of operation, and data related to the weather and water conditions at the operating site should be collected such as wave height, current, wind speed and water temperature. For subsea applications, generally, multicore cables are used due to their compactness and minimizing the number of connectors. A generalized cable is depicted in
Figure 2.
In this paper, we present the derivation and development of governing equation of TC motion for a finite-segment lumped parameter model. The model developed is limited to a two-dimensional (2-D) configuration, and hence, 2-D analysis. This study is conducted to estimate the profile and forces on underwater tether cables. The effects of variable water density and variable underwater currents are included in the cable behavior. Water density variation occurs due to temperature and salinity changes in various areas. Marine water density usually varies from 1025 kg/m
3 to 980 kg/m
3 up to 500 m depth of water. The current variation occurs with the depth of water and becomes almost zero at a depth of 50–60 m below the water surface [
10]. This modeling approach will enable us to observe, predict and monitor the TC dynamic response in any operational conditions. The study comprises the mathematical modeling and numerical simulation of the developed governing equations for the TC under consideration. Consequently, the 2-D TC profile and axial tension are estimated in a steady-state configuration.
3.2. Basic Assumptions
TC is continuous, inextensible, and infinitely flexible.
TC can only resist tension forces, not bending moment and compressive forces.
Hydrodynamic forces on TC are resolved into tangential and normal components.
Steady static dynamic condition is considered, and the problem is addressed at equilibrium condition.
Length of the TC is not fixed and can be adjusted as the robot moves forward or backward using payout or pay-in operations.
Underwater current is parallel to the UMSWR heading and varies vertically with depth, and becomes zero at a depth of 50–60 m below the water surface.
Seawater has variable water density.
UMSWR is heading in a fixed straight line and with a nominal constant speed.
No surface and subsurface disturbances for surface platforms are considered.
3.3. Mathematical Modeling
The mathematical model of the system is useful not only for formulating control algorithms but can also be used for performing the simulation. A continuous cable model cannot be used for the solution of the problem; it is, therefore, more appropriate to use a discrete model of the cable. Several approaches have been used by various people to model tether cable dynamics. There are several methods with different assumptions and considerations for the analysis of underwater cables. These include the analytical method, finite segment lumped mass method, catenary method, high order finite element model and finite difference method. Of all methods in the literature, the lumped mass method and finite segment method have been widely applied due to their ease of implementation and accuracy in terms of numerical results [
35,
36,
37,
38]. We employed lumped parameter and finite segment methods for this tether cable study. In this method, TC is discretized into a finite number of inextensible rectilinear segments. Each segment has an identical formulation of parts, joint forces and constraints. These segments are connected by frictionless pin joints at the node position. The use of pin joints makes the TC very flexible. Hydrodynamic, gravitational, and buoyant forces and the mass of the cable are concentrated at the center of mass of the cable elements. The TC is divided into
equal-length elements, and the result from one element is propagated into the next till it reaches the endpoint of the TC. The number of discrete elements defines the accuracy of the simulation. The greater the value of
N, the greater will be the accuracy. For
N cable elements, there are
N + 1 nodes. An illustration of the discrete representation of the marine cable is shown in
Figure 3. This implies that the TC is modeled by an assembly of
N rectilinear elements that extend between node 1 and node (
N + 1), the boundary nodes. Node 1 lies at the point of connection of the TC with the surface ship, while node (
N + 1) lies at the point of connection of TC with the UMSWR.
This problem is based on a two-dimensional formulation in which the steady motion of the UMSWR in a straight path is considered. Hence, using a quasi-static approximation for TC dynamics for modeling TC motion and resulting cable profile and axial tension. For the relatively steady motion of the marine tethered platform, the transient motions of the cable during straight maneuvers are not significant. Thus, the problem is formulated as a simple quasi-static problem in which the inertial terms, including added mass effects in the cable equations of motion, are ignored, and the cable is assumed to respond instantly to any external disturbances. Inertial forces and added mass effects are therefore neglected in this study. Using a quasi-static approximation to the tether dynamics, the equilibrium states of a tether cable were determined during straight motion and at the constant speed of the seabed walking robot. The simulation is extended for various input parameters. The basic input parameters to the solution of the problem are UMSWR speed, operating depth, cable diameter, number of cable segments, TC density, length of the TC, seawater density and underwater current. In the output, our parameters of interest include the position and velocity of each node, depth, altitude, and velocity of each segment and ultimately, the axial tension along the cable and its profile. Such modeling provides numerically efficient simulation without the loss of accuracy. Since these linear lumped mass elements do not exhibit any curvature or twisting phenomena, it does not include low-tension bending and torsional effects. The lumped mass and finite segment approach has been demonstrated accurately in hydrodynamic applications while requiring significantly less computational expense than the other numerical modeling approach. On the other hand, for example, the finite difference modeling approach is based and built on a more mathematical foundation involving complex mathematical computations.
3.4. Reference Frame System
Coordinate reference frames are necessary to describe any position or motion of the system and its components [
8,
28]. The use of additional reference frames makes the derivation of the equations of motions easier. While using multiple reference frames, there is one important issue related to the transformation of vector coordinates from one frame to another. For this purpose, rotation matrices are used based on the Euler angles. A reference frame is used to determine distance and direction in the system. A coordinate system is used to represent measurements in a frame [
39]. In the case of the 2-D model, two types of orthogonal reference frames are employed. These frames are inertial reference frame
, with its origin fixed in space and TC body-fixed reference frame
. These reference frames are illustrated in
Figure 4.
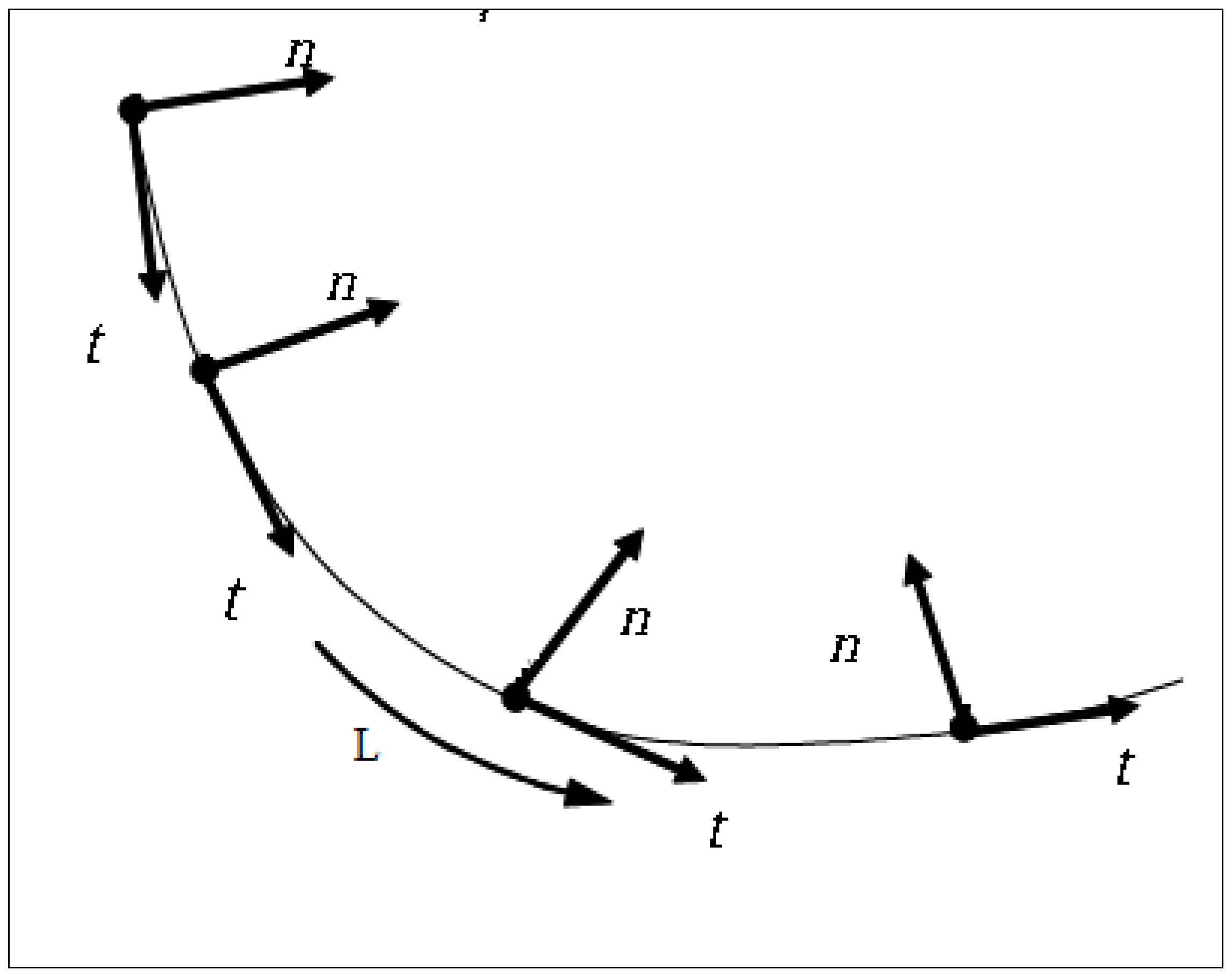
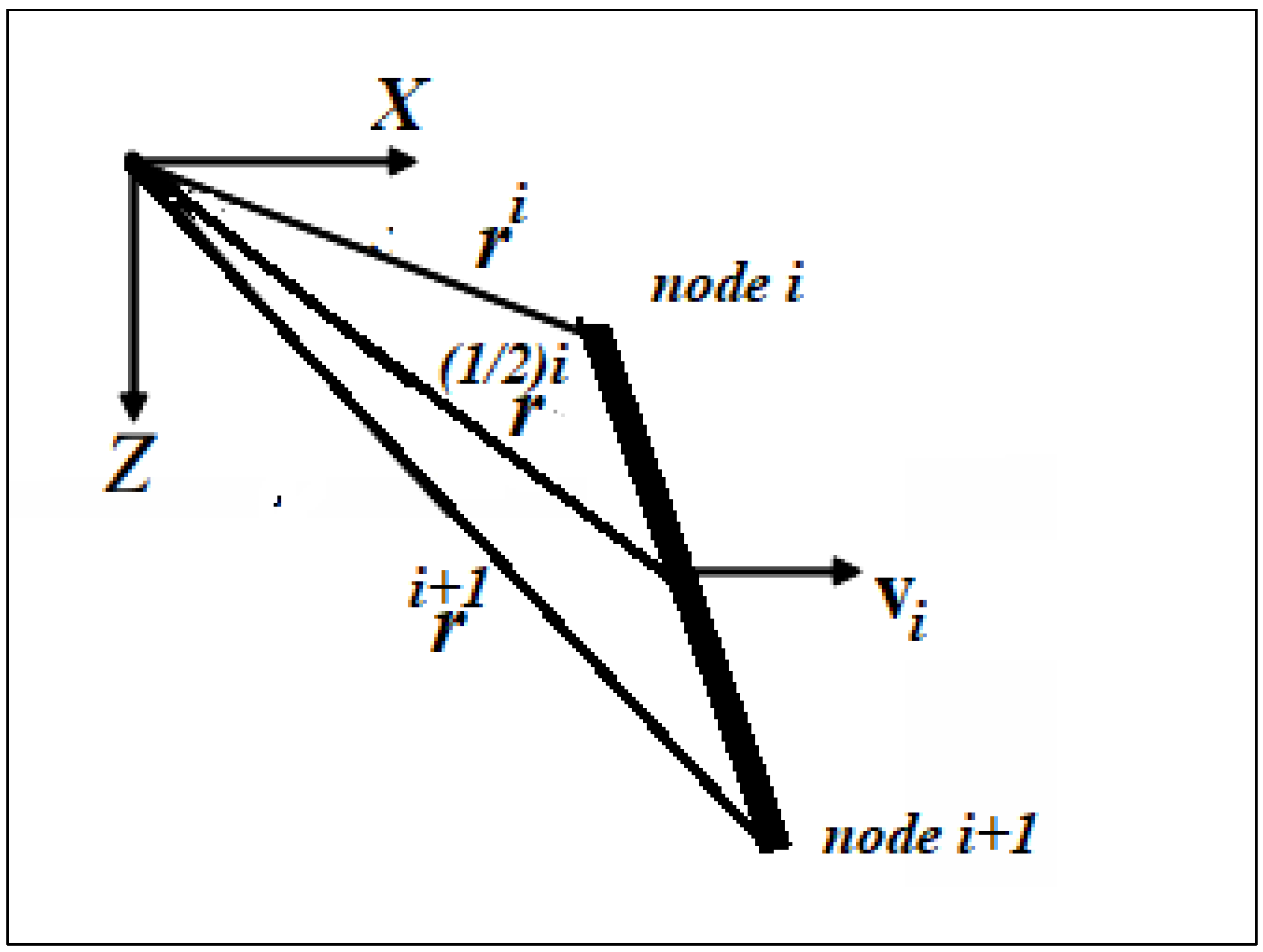
Important dynamic properties of the TC are analyzed in a better way in Cable-Fixed Frame while the governing equations of TC motion representation are required with respect to the inertial reference frame. For actual cable, the orientation of the local reference frame in two-dimensional space varies continuously with changing location both in space and time, as depicted in
Figure 5. This frame is also called the moving frame, as the direction of the unit vectors changes for each element in time. The origin of the local frame of reference is placed at the center of gravity of the element. The inertial frame of reference has its origin placed at the point where the cable departs from the surface support ship, and the first cable’s element is attached to the surface support ship. The unit vector
is in the surface ship longitudinal direction with
pointing vertically downwards. The surface vessel is assumed to be fixed in position and, hence, the origin of the inertial reference frame.
The equations of motion of the tether cable must be transformed into an inertial frame of reference. Equations of motion are transformed from intrinsic frame of reference
to an inertial reference system with unit vector
. This transformation occurs by using a set of Euler angles. For the 2-D case, the Euler angles are limited to a single rotation
. We use a transformation matrix
that can be obtained through a partial rotation, which is used to relate two two-dimensional axes systems.
can be defined as:
for each element of the TC, the inertial frame
and TC body fixed frame
can be related by using Equation (2):
The inverse relation can be obtained as:
The Euler angles can be calculated at any instant in the simulation, provided that the endpoints of the cable element are known.
Key factors affecting TC analysis accuracy are the influences of underwater environment parameters. They change the position and posture of the flexible cable, which results in the variation of loads on underwater vehicles. In order to ensure the required accuracy, these factors should be included in the analysis. The most important of these factors include variable water density and variable surface current [
40]. These environment parameters must be specified in a mathematically precise way.
3.5. Variable Underwater Current
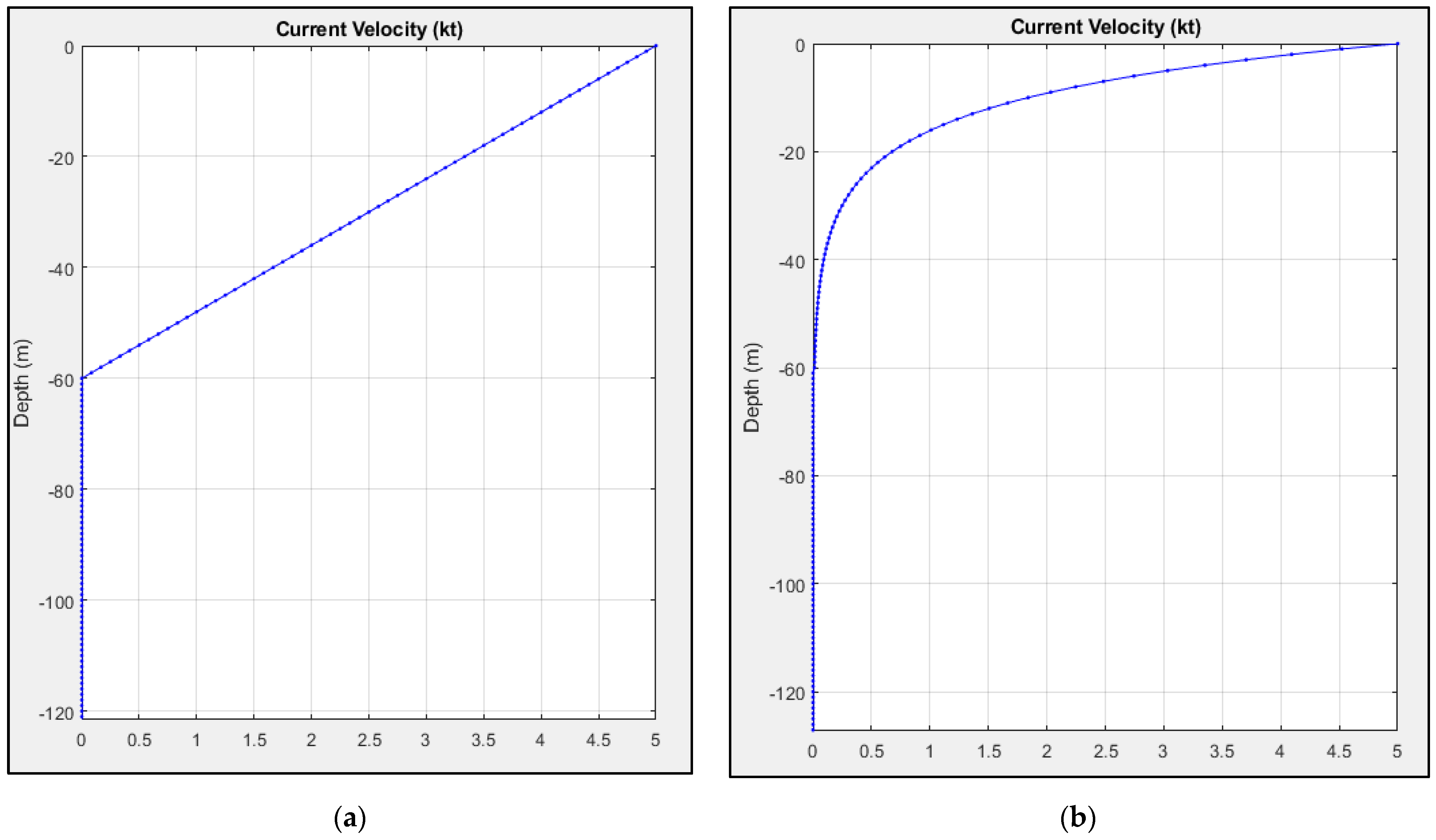
Variable underwater current effects are included in TC analysis. Ocean currents are continuous, predictable, directional movement of seawater, driven by gravity, wind friction (Coriolis Effect), and water density variation. It is primarily horizontal water movement, ranging in magnitude from 0.02 Knots to as much as 5 Knots [
41]. The ocean is constantly in motion and never stands still. Hydrodynamic forces accumulate on TC, either due to underwater currents or relative motion of the UMSWR and surface ship, which may affect its maneuverability. Underwater currents generally may change direction and speed with depth. Underwater currents are expressed as a function of water depth
:
Usually, these currents become equal to zero at a depth of 50–60 m below the surface of the water. In scientific study, various underwater current profiles are considered, including constant profile, linear profile, exponential profile, and sinusoidal profile.
Figure 6 shows linear and exponential profiles of the underwater current with respect to depth. The most realistic profile for engineering applications is the exponential profile. Actual measurements at sea can also be used to calculate the profile of the underwater current for that area. The relative velocity
of the fluid around the tether cable can be expressed as relative velocity due to UMSWR
and underwater current velocity
:
As UMSWR moves on the seabed with velocity
, the end node
of TC moves at the same speed, i.e.,
. The position of the first node of the TC that leaves the winch is fixed in space and has a velocity equal to zero. All elements of the TC move at a speed, uniformly varying from
at node
to
at node
, which results in a uniform velocity gradient of the TC element in the x-axis direction. This velocity gradient is then augmented with the surface water current (
that results in the relative velocity of the TC and surrounding fluid medium.
The relative velocity of the fluid is a function of depth z. This means that each element of the cable will have a distinct drag velocity at different depth locations.
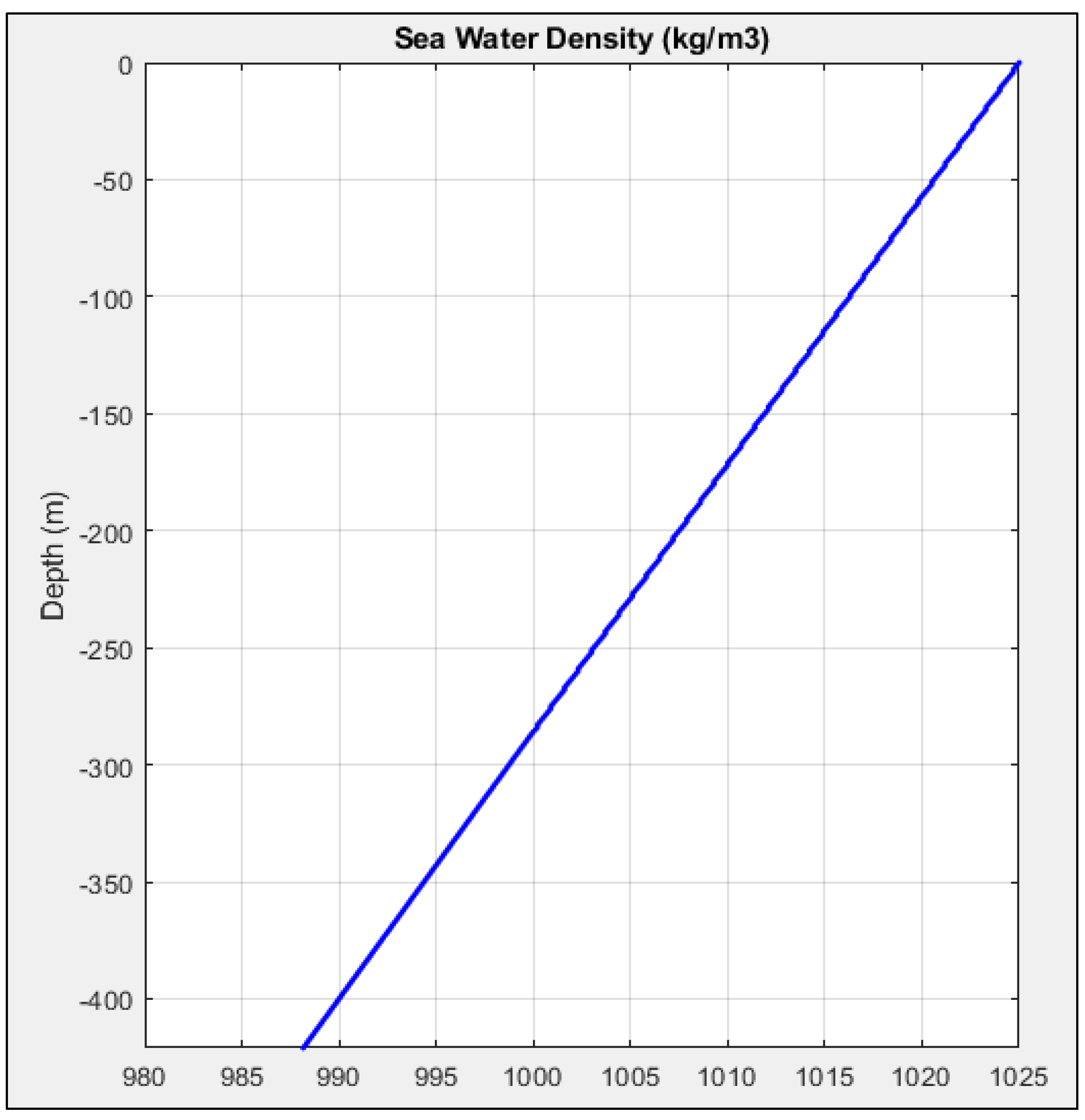
3.6. Variable Water Density
Different marine waters in the world have different densities that primarily depend on water temperature and salinity [
42,
43,
44]. This variation in the water density results in the net positive buoyancy or net negative buoyancy force on the object in the water. Similarly, this buoyancy effect has to be studied for hundreds and thousands of meters of tether cable. Variable water density
is a function of water depth
from the surface of the water:
Generally, water density varies linearly with depth
, ranging from 1025 kg/m
3 on the water surface to 990 kg/m
3 at a depth of approximately 500 m from the surface [
10]. This effect is shown in
Figure 7. This density variation with depth has a significant effect on the tether cable’s specific weight and, hence, buoyancy force, on the tether cable.
3.7. Cable Discretization
The whole cable of length
L is divided into
N number of segments. The length of each segment
can be calculated as follows:
For N segments of the tether cable, there are (N + 1) cable nodes. These cable nodes start at node at the point where the cable is connected to the surface ship/floating platform where the winch of the cable is located. Its number increases from top to bottom, with Node N + 1 at the point where the cable is connected to UMSWR.
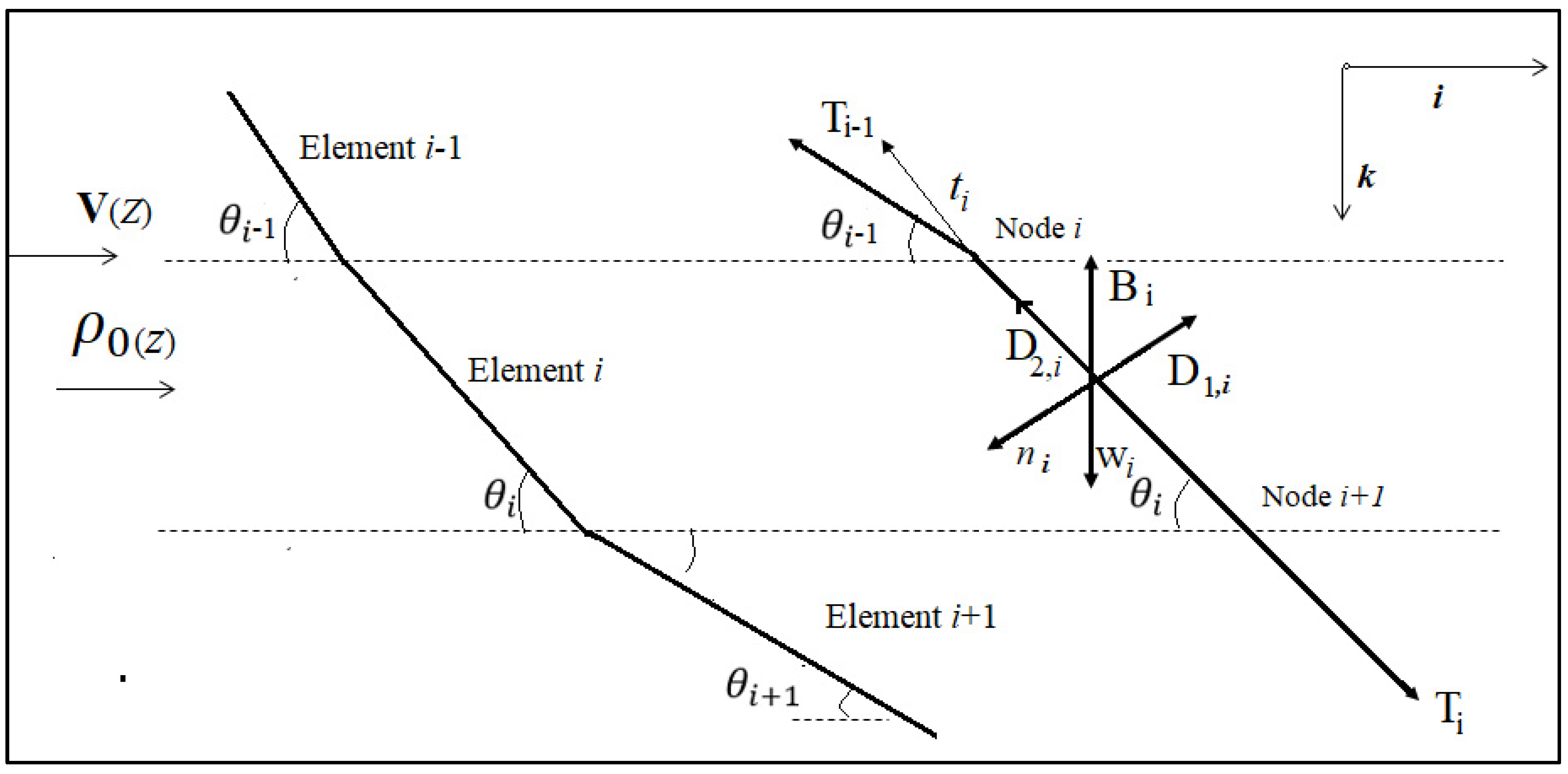
3.8. Element Force Definition
For the cable element, the discretization and force diagram are illustrated in
Figure 8. The schematic shows various internal and external forces acting on the cable element
. The external forces include weight force
, buoyancy force
, axial drag force
and normal drag force
. Hydrodynamic and gravitational forces acting over the TC create internal forces, i.e., axial tension
within the cable elements, which significantly disturb the motion of tethers and, hence, UVs [
11]. Internal forces in TC are generated by the elasticity of the cable elements, which allow the stretch of the elements in the tangent direction. Huang [
45] has proposed a methodology for calculating cable tension in three dimensions. With this approach, the tension
within the element
acts in the tangential direction of the element, modeled as a linear function of the tangential strain of the discrete cable elements. However, in slack or low-tension cables, the stretch is so small that it is neglected. The tension in such a case is found by an assembly of forces in the element by using steady-state conditions in equilibrium. Generally, fundamental dynamic properties and forces on the cable are analyzed in the cable fixed frame and are then transformed into the inertial reference frame [
46]. The weight force
of the cable element
can be expressed as:
where
is cable diameter,
is cable density,
is length of cable element, and
is the gravitational acceleration constant and
.
Similarly, buoyancy force on the cable element
is calculated as Equation (9):
Here,
represents water density. Consequently, specific weight of the cable
is expressed as shown in Equation (10):
is the specific weight of the
cable element at the geometric center of the element with respect to the depth of the element.
varies with depth as the density of water
changes with depth. So, the density of the element is taken at the average depth of the element by linear interpolation of the end nodes’ Z coordinates (
), which is mathematically the mid-point of the element. Putting values of
and
into Equation (10), the specific weight of the element can be written as in Equation (11):
the drag force acting on the cable is divided into tangential and normal components. According to hydrodynamic Morison formula, the axial drag force on element
is
which acts parallel to the t-axis of the cable, i.e., tangent to the cable element.
is given as shown in Equation (12):
where
is the coefficient of the axial drag of the cable,
is the relative velocity at depth of the element, and
is the angle of the element, correspondingly.
Relative velocity
depends on the depth of water.
is the velocity of the geometric center of the
cable element with respect to the surrounding fluid.
is found at the average depth of the element by linear interpolation of the end nodes’
Z coordinates, i.e., (
), also called the midpoint height of the element, as shown in
Figure 9.
By taking the constant terms (
equivalent to
for simplification, Equation (12) can be written:
Similarly, the normal or cross-flow drag force
is the force that acts normally to element
. It acts along the n-axis of the cable.
is calculated by Equation (14):
where
is the coefficient of the normal drag of the cable. To simplify the equations, taking the constant terms
, Equation (14) can be written as:
For cable elements, there are angles formed, one each at the lower end of every element. For element , the angle is at node . Tension of the element makes an angle of at node ( and the tension at the previous end of the same element makes angle , which acts in the opposite direction.
It is obvious that all the forces (, , and ) are a function of the water depth because the relative velocity and water density depends on the water depth.
3.9. Assembly of Forces
Applying the assembly of forces at the lumped mass representation of the cable elements yields a series of 2N equations that govern the motion of the element nodes in the X and Z directions. To evaluate such equation of motion, the vector quantities described above are resolved into inertial representation for use in the equations of motion of the cable element. By applying the assumption of steady-state condition at equilibrium, as mentioned earlier, the force balance for the
element in the cable-fixed frame can be expressed as shown in Equation (16):
Equation (16) can be written as:
Putting the values of the relevant transformation matrix in Equation (17), we obtain the system of Equation (18) for element
:
We obtain (2
N) the number of equations for
N elements, which govern the motion of the nodes in the X, Z directions. Equations of system (18) for element
depend on the terms from the previous element
. These terms can be written as:
Putting the terms containing quantities from the previous elements, the system of Equation (18) becomes:
The equations of system (21) represent the governing equations of TC dynamics for UMSWR in 2-D. Equation (21) presents two unknowns
and
for each element. In order to solve these equations, an iteration solution must be used along with boundary conditions. For
and constraints
the iterative solution to Equation (21) gives solution for
as:
And for axial tension
as:
The main concern for the tether cable analysis is the axial force or tension, which is the most crucial component of studying cables. The ultimate objective is the determination of the tension in each element of the TC as a function of the relative velocity and, consequently, the tension of TC at the point where it is connected to UMSWR.
3.10. Geometry Computation
The orientation of each discrete cable element is represented by using a
Euler angle set [
45]. These successive rotations align the inertial frame with the
local frame of the cable. To specify a particular orientation for the local frame, all values for angle (
are calculated based on the observed lay of the linear element in space. From
Figure 8, element
that is bound by two nodes
and
, we have:
where
and
represent the location of nodes
and
of the element
in x-axis and while
and
represent location of the nodes of element
in z-axis Substituting the values of
in Equation (24) we get the following relation:
From equation set (25)m each node coordinates of the cable
in both x-axis and z-axis can be calculated given the location of the previous node values:
From Equations (22), (26) and (27), after knowing the angles and coordinates of all the nodes for each element, we can get the cable profile. The horizontal distance between TC lower end and surface ship is called the trail or range of the TC. Similarly, the range of the TC is calculated using Equation (28):
Similarly, the depth of the cable can be calculated using Equation (29), as below:
3.11. Variable-Length Tether Cable
To minimize tether-induced vehicle disturbances, the length of the TC should be controlled by the mechanism of tether payout and reel-in. This causes the TC length to be a variable parameter. Moreover, the hydrodynamic drag force acting on the cable induces a large variation in the cable tension as the UMSWR moves forward. The difference between the amount of cable actually deployed and the cable required from the surface ship to reach the UMSWR point of connection is called slack. Careful control of the slack in the TC is extremely important in order to avoid the extremes of running out of cable, leading to extra cable on the seabed that results in zero tension and avoiding the taut conditions that build up excessive tension, which can break the cable. Therefore, the length of the cable should be compensated by either reeling in or paying out [
5]. With this compensation mechanism, the winch rotation controls TC variation by either paying out the cable when the tension is increasing or reeling in the cable when the tension is decreasing. Paying out and reeling in the cable is carried out using a linear engine or a drum at a rate governed by the UMSWR speed of advance along the route.
The cable payout rate
should be equal to the UMSWR speed to avoid any unfavorable conditions, i.e.,
The amount of cable paid out is obtained through the integration of the payout rate. The payout rate is assumed to be a known function of time. Thus:
In practice, the amount of cable paid out
is the length of extra cable added to the initial value of the cable necessary to control the slack. As the UMSWR goes forward in time interval
,
is given by Equation (32):
By using the continuity relation, which states that the tether cable suspended length at time
is the cable suspended length at time
plus the amount of cable paid out
during time interval
. Hence,
where
L is the total length and
is the initial length at time
.
3.12. Numerical Calculation
To evaluate the motion of the TC and calculate its profile and tension in steady-state condition, the concept of state vectors is used. Because the state-vector technique accurately represents most physical systems, which only have very minor deviations in their steady-state behaviors. To obtain the solution, it is convenient to describe the system in terms of its intermediate dynamical state, called state vectors [
47]. It expresses the effect of external forces on the system in quantitative form before the present moment so that the future evolution of the system can be exactly given from the knowledge of the present state and the future inputs. Consequently, the state vector can be used for state determination [
48]. Hence, equations of motion for any physical system may be conveniently formulated in terms of its state for a given instant of time. Future states depend only on the current state and on any inputs at a given instant of time and beyond. All past states and the entire input history are summarized by the current state [
49].
The steady-state state vectors (X, Z, ) define the cable profile at any instant in the simulation and the state vector T defines the tension in the TC. Initially, state vectors of X, Z, T and are defined using zero vector and discretization parameter N for initialization of these parameters. These state vectors represent column vectors with N rows for T and and (N + 1) rows for X and Z, respectively. Given the initial values of the tether state vectors, the simulation can be advanced in a steady-state condition following these steps:
First of all, using zero vector and discretization parameter N, initialization of the state vectors for X, Z, T and θ, which are used to allocate indices to node and element values for the state of these quantities given by:
Initial values of X, Z are given by X(1) = 0 and Z(1) = 0 by fixing the position of node i = 1. The value of T at element i = 1 can be found by using Equation (11), and at node i = 1 is assumed to be for the initialization of these variables.
Positions of X(2) and Z(2) for node i = 2 are calculated by using Equations (26) and (27).
From these findings, the orientation of each element is calculated, and the series of rotational transforms is carried out by using Equation (21) at equilibrium conditions for all elements.
The X and Z coordinates for all nodes were calculated by Equations (26) and (27).
After finding the coordinates of all nodes for elements of TC, velocities are found for the average depth of the element, which is actually the velocity of the center of mass of the element.
Using the known element velocities , the hydrodynamic drag forces in normal and tangential directions are calculated using Equations (13) and (15).
Similar to element velocities, densities are calculated at the average depth of the elements of TC.
Similarly, using the known values of the densities at the depth of the element, consequently, the specific weight are calculated using Equation (11).
Using the assembly of force at equilibrium condition at the center of mass of the element, the tension forces within all elements are calculated according to Equation (23). The tension at element i = N, is the tension at the tow point of the UMSWR.
The element tension ( is augmented with the orientation of the current tether state to form the first steady state of the state vector for cable length L1. This vector is then passed onward to produce the next state of the cable for cable length L2. As the speed of the UMSWR is assumed uniform, the process continues for the limit of the tether cable maximum length.
Assembly of the forces and solution of the governing equations and implementation of the state vector technique is carried out in MATLAB-R2022b software on the latest desktop computer to simulate the governing equations of TC dynamics. The specifications of the desktop computer are: Core i-7, 2.60 GHz. The equations developed above are coded in a MATLAB program, and provisions are made to allow for steady-state motion, gravity loading, and velocity-squared dependent drag forces. MATLAB is used because of the programming simplicity and powerful matrix and vector operators in it, which significantly simplify the formulation and solution of the TC equations of motion [
50].
3.13. Boundary Conditions
The
N instances of Equation (16) form a combination of initial and boundary value problems. To evaluate the cable dynamics, it is necessary to provide both the requisite boundary conditions and an initial system state from which the model can be advanced in time. Boundary conditions must be given at both ends of the cable (upper end and lower end). Dirichlet boundary conditions are used in such kinds of simulations [
51]. Since nodes of interest are located on the boundary, the Dirichlet boundary condition is straightforwardly applied to end nodes of the TC. For the nodal system depicted in
Figure 3, the boundary conditions may be written as:
This gives boundary condition at the upper end of the TC.
is the velocity of node 1 which is fixed in space. As we assume that the vessel motion is fixed by using dynamic position control, the first boundary condition is given by fixing the position of the surface vessel. Whereas
is the tension experienced at the upper end of the TC, which can be calculated by using the formula in Equation (36):
where
gives the effective specific weight of the cable of a given length, which in turn gives the tension of the TC at the upper end. Similarly, for the lower end, the cable is connected to the UMSWR. So, the second boundary condition of TC is given as:
is the velocity of the lower end node that is connected to the UMSWR, which is equal to the velocity of the UMSWR itself. is the tension in the element , which is equal to the resultant tension as the UMSWR moves at a given speed on the seabed for a given length L. and are the locations of the positions of end nodes on the cable attached to UMSWR on the seabed.
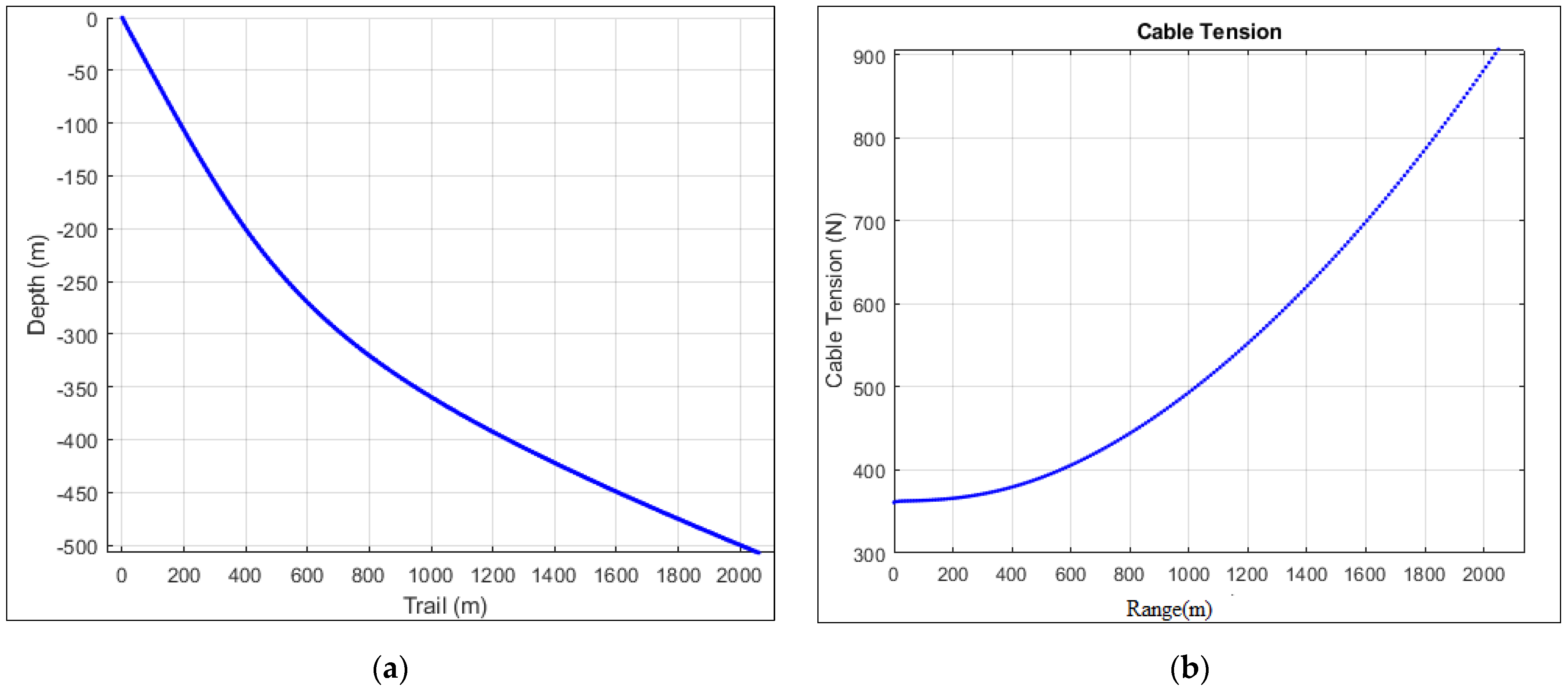
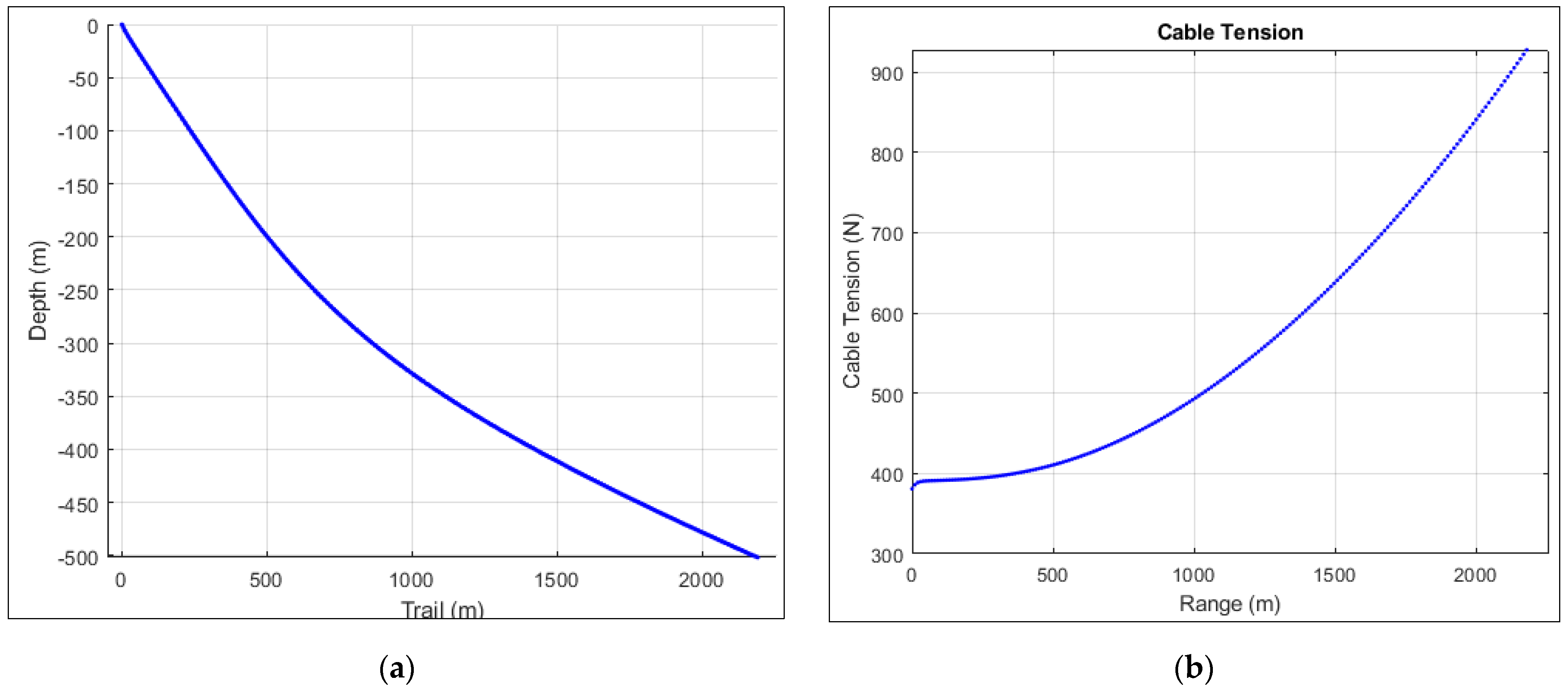
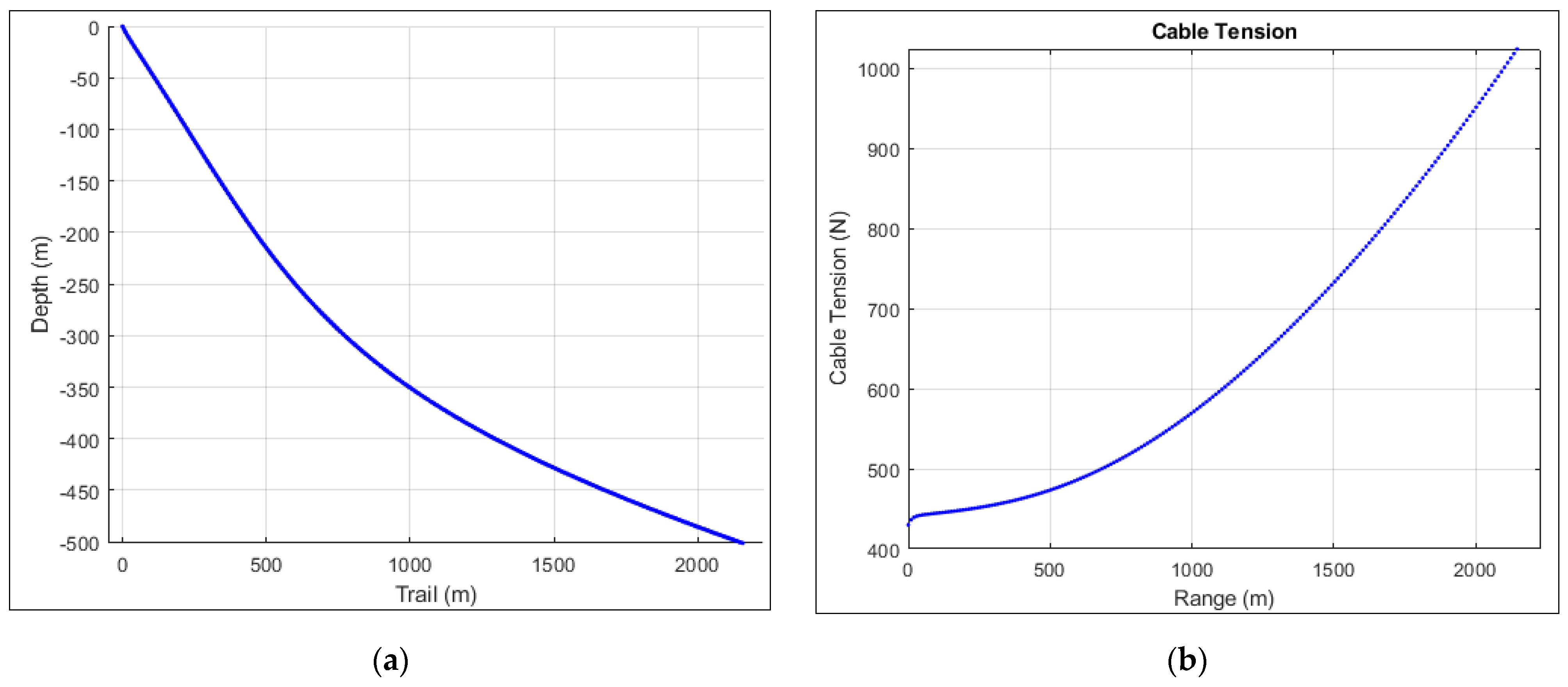
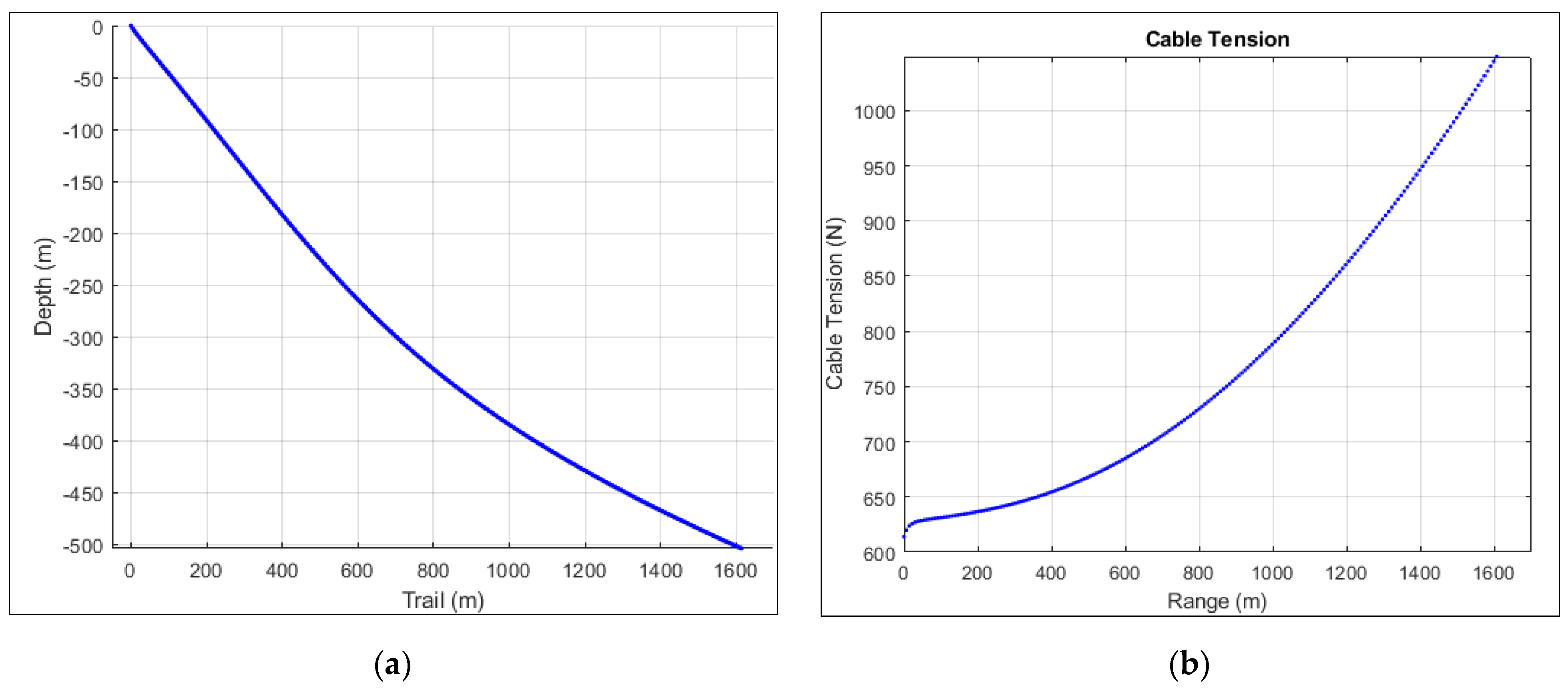
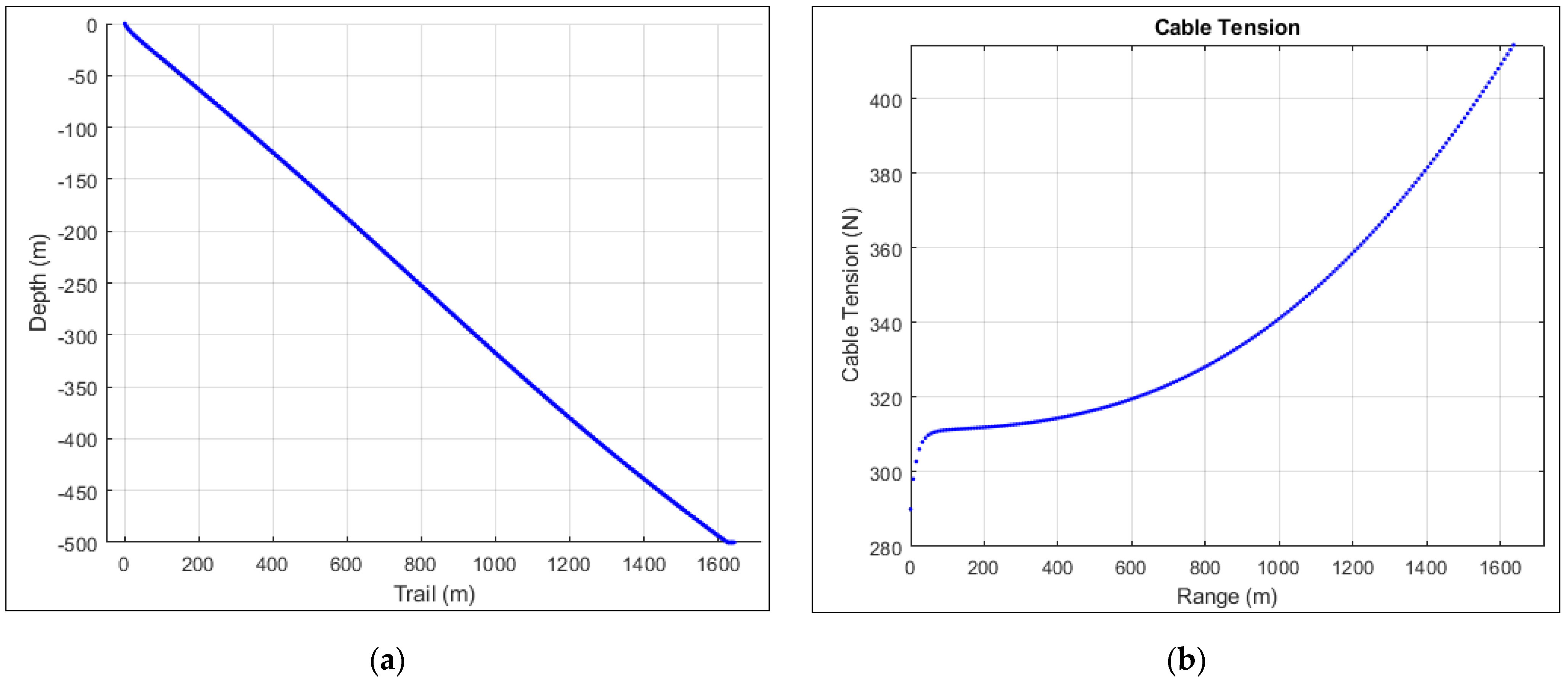
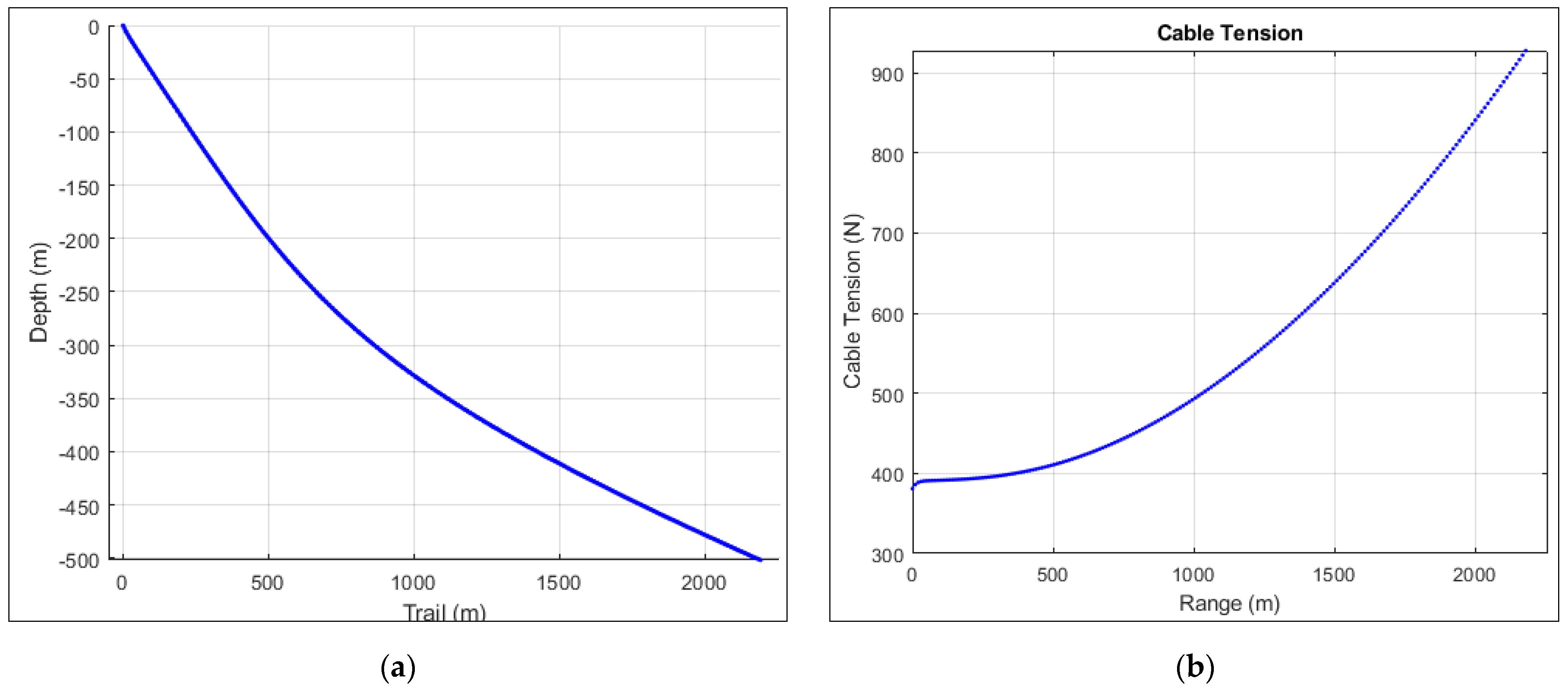
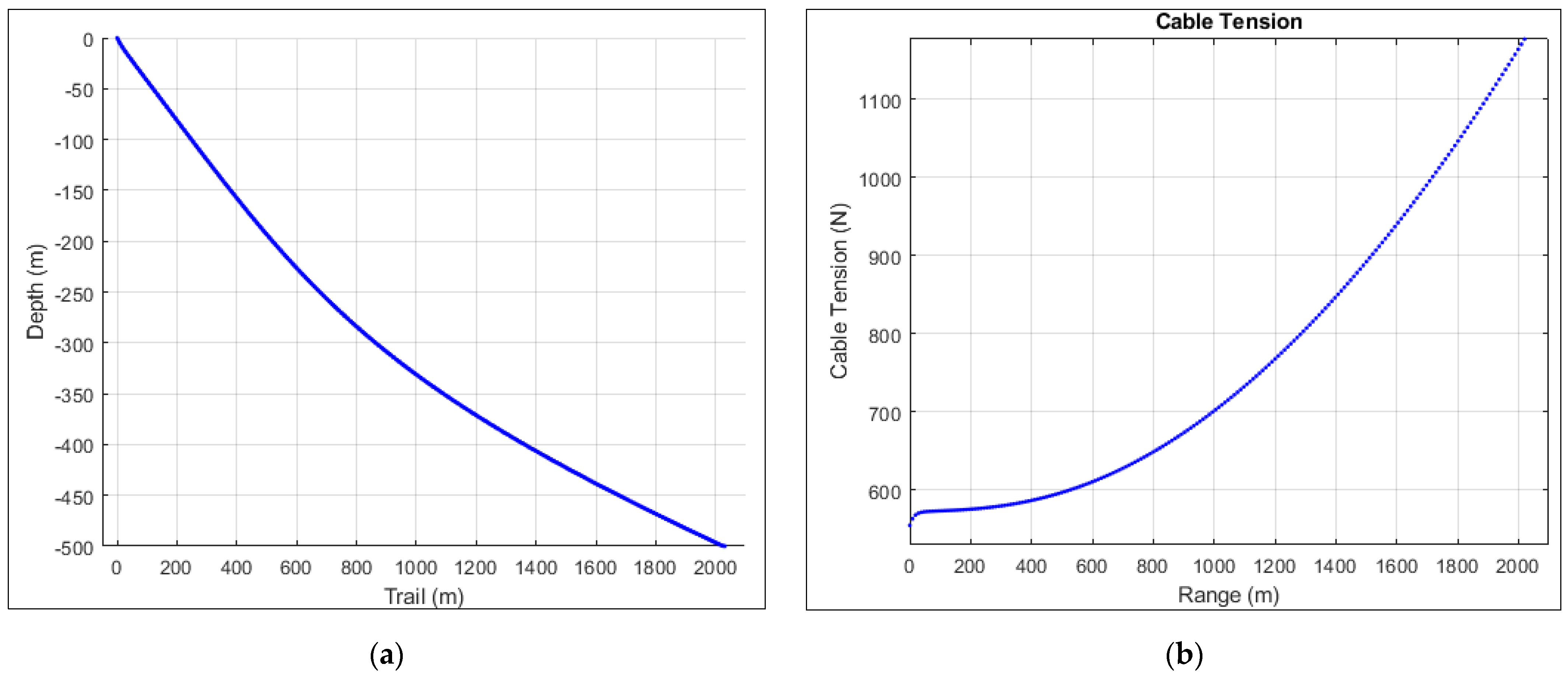
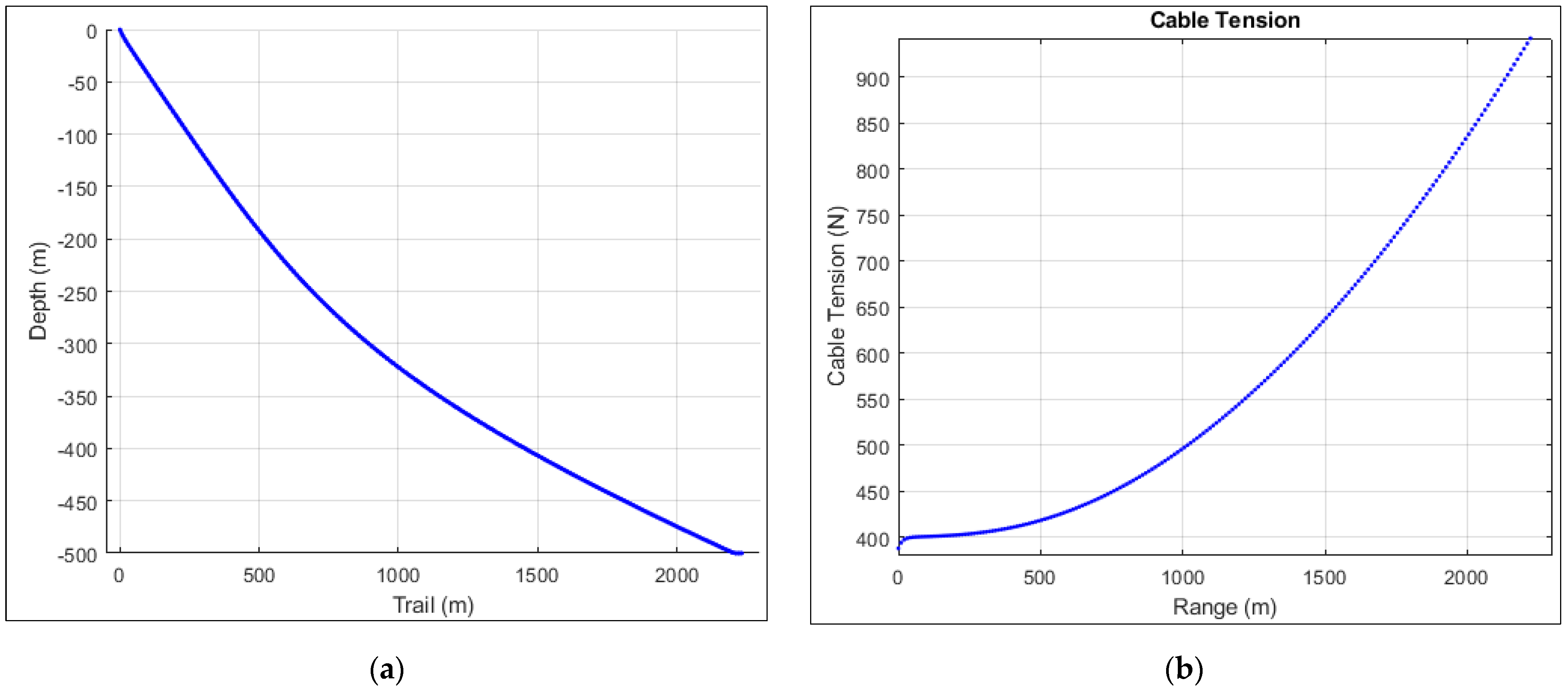
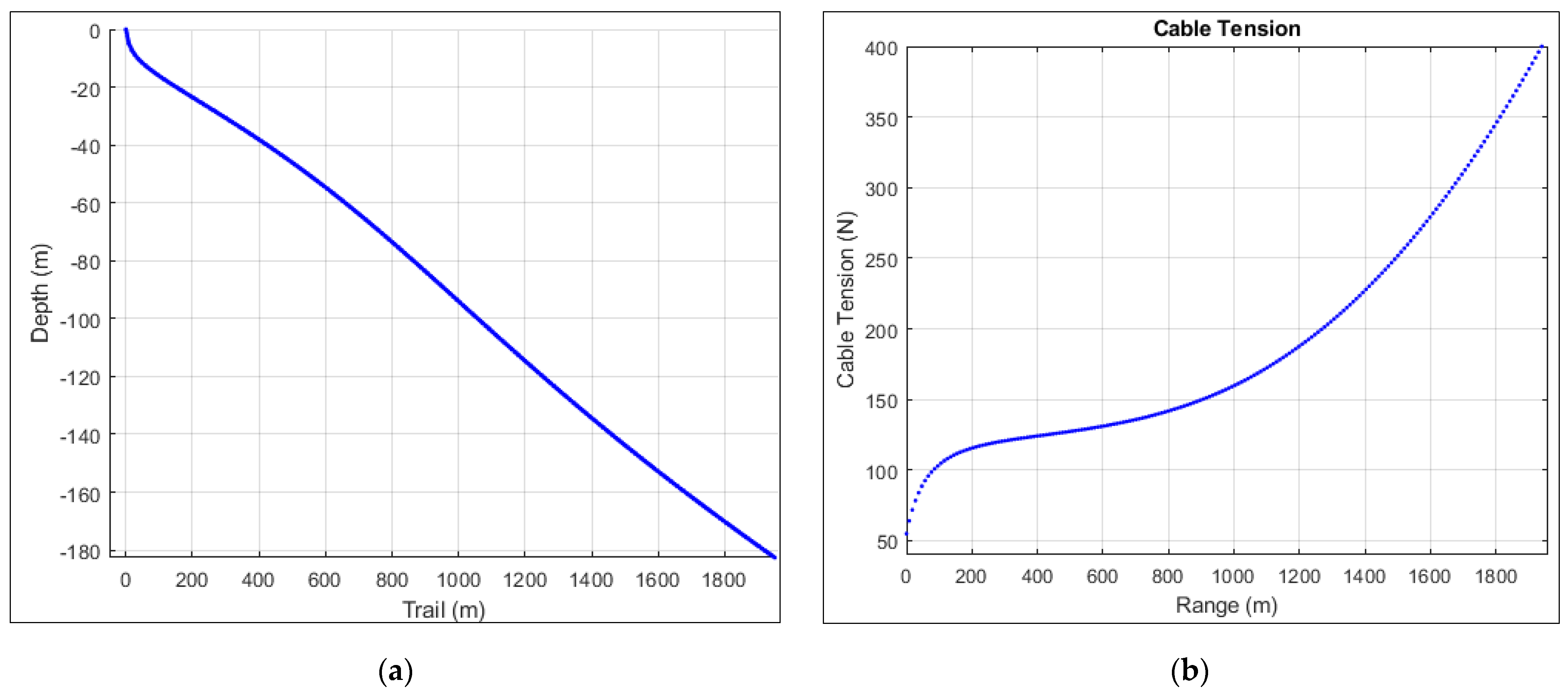
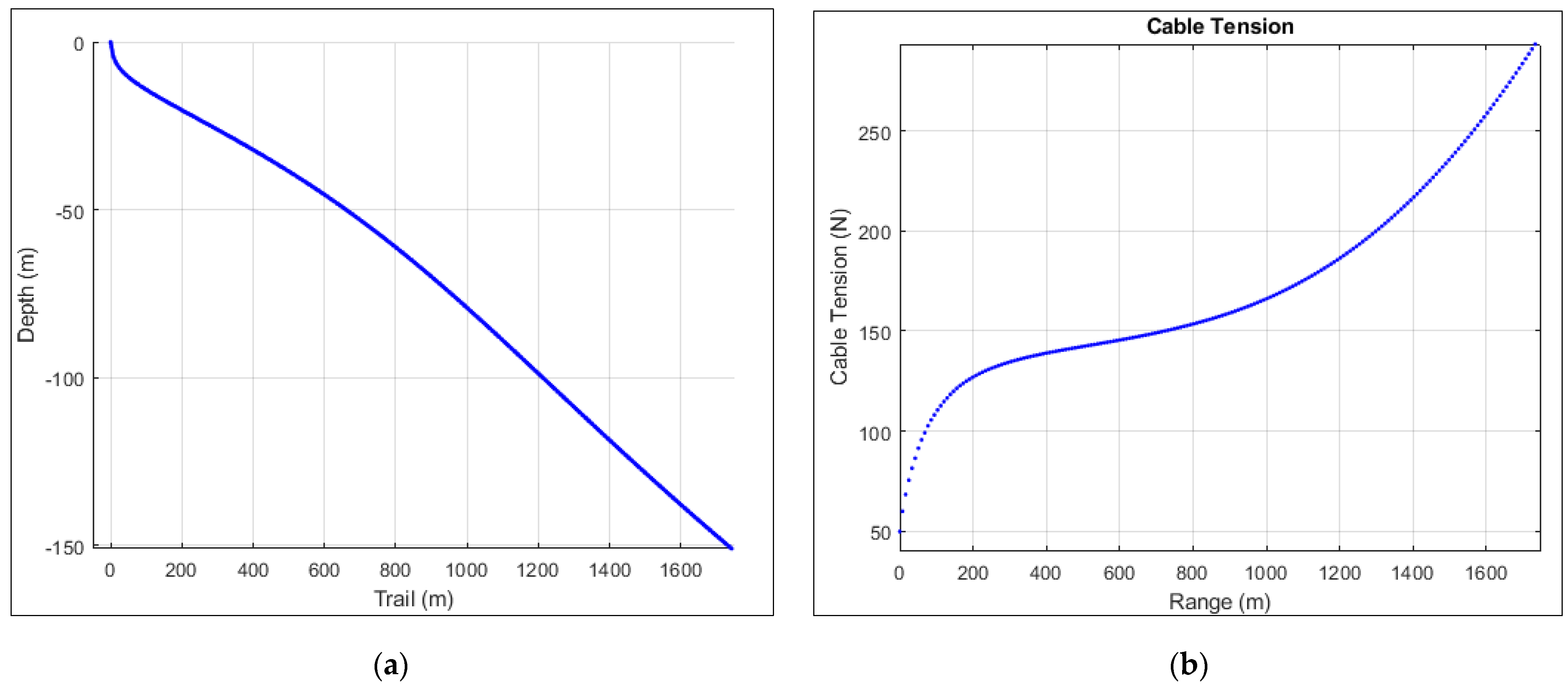
In the present study, a cable is adopted as the numerical model for calculations. TC is divided into 200 equal-length elements, and the result from one element is propagated into the next till it reaches the final element at the UMSWR. The global coordinates of the initial position of the TC connected at the free surface to the support vessel are assumed to be (0, 0) m and at the other end connected to UMSWR are (, )m, respectively. The initial length of the TC is set to be 1000 m. The lower end of the cable is moving at the speed of the UMSWR (); the variable surface current speed is considered in the study. Initially, prior to movement of the UMSWR, the maximum tension is experienced at the upper end of the tether cable. As the UMSWR starts moving, the maximum tension is experienced at the lower end of the TC due to the hydrodynamic drag force.
3.14. Implementation of Numerical Model and Simulation of Tether Cable Maneuvers
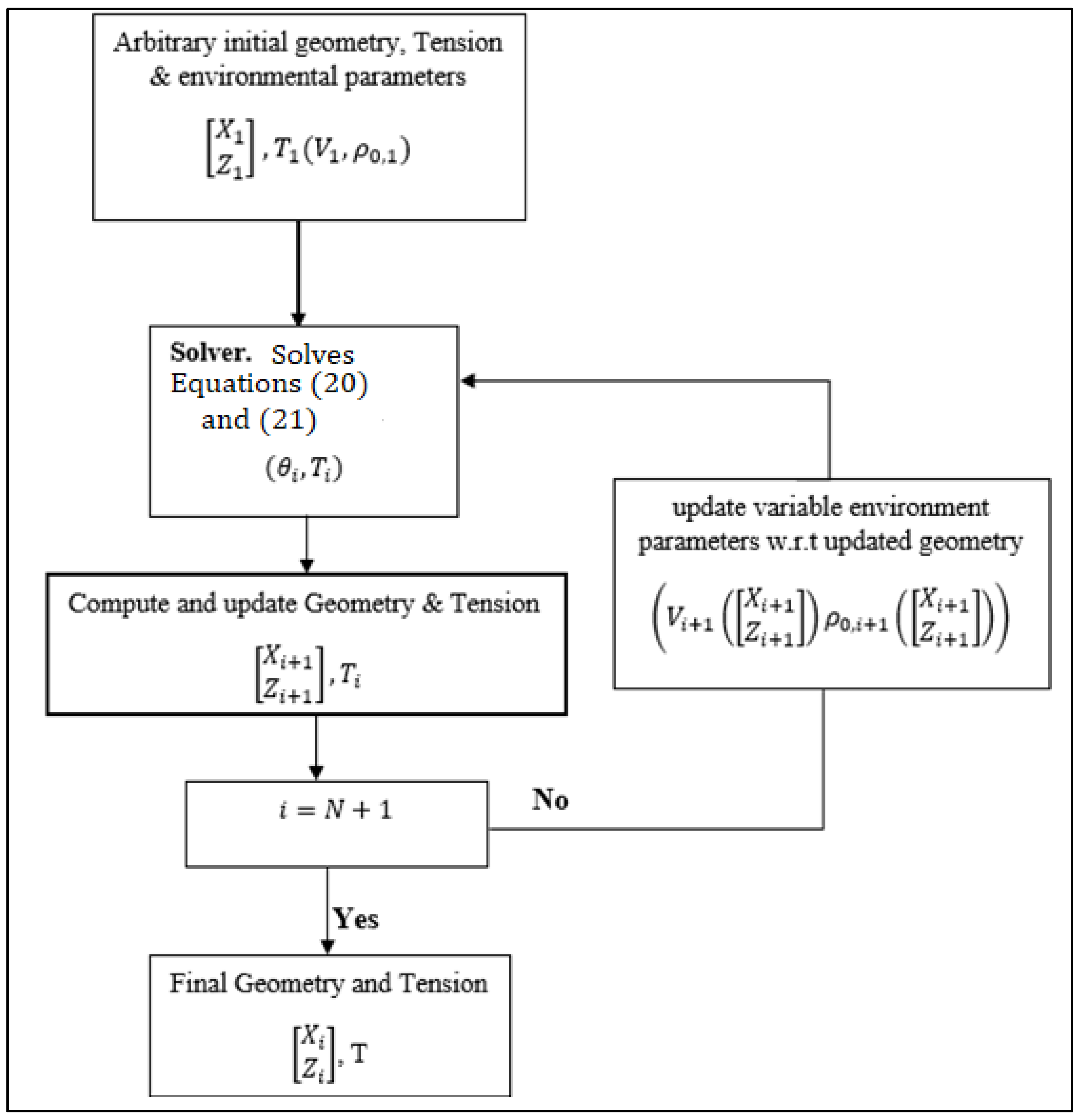
The foregoing procedure has been developed into an algorithm for MATLAB computer programs. Using the 2-D lumped mass and finite-segment model formulation presented above, the motion of deployed TC subject to general kinematic or dynamic boundary conditions is captured. The performance of the lumped mass and finite-segment model for various TC parameters and the speed of the UMSWR are examined. The numerical implementation of governing equations of TC dynamics is carried out by the algorithm of
Figure 10. This algorithm mainly focuses on the solver of Equations (22) and (23) for all cable elements and iterative update of the environment parameters and ensures that suitable environment parameters are applied to discrete cable elements at corresponding depth. Equation (22) is a continuous function having a unique zero in the interval
. The stability of zero finding for Equation (22) relies on Parameter N.
3.15. Tether Cable Effects
While moving on the seabed, the maximum tension in the tether cable is generated at the tow point. The tension of the TC at the tow point, i.e.,
results in the additional forces and moments that affects the motion of the UMSWR. In terms of the position of the tow point in the UMSWR, the cable-induced moments are calculated as
where
is vector from the center of the gravity of UMSWR to the connected point between the cable and UMSWR.


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}